Robot Millennium (Версия 20.0). Руководство пользователя
Подождите немного. Документ загружается.

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 581 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
15.
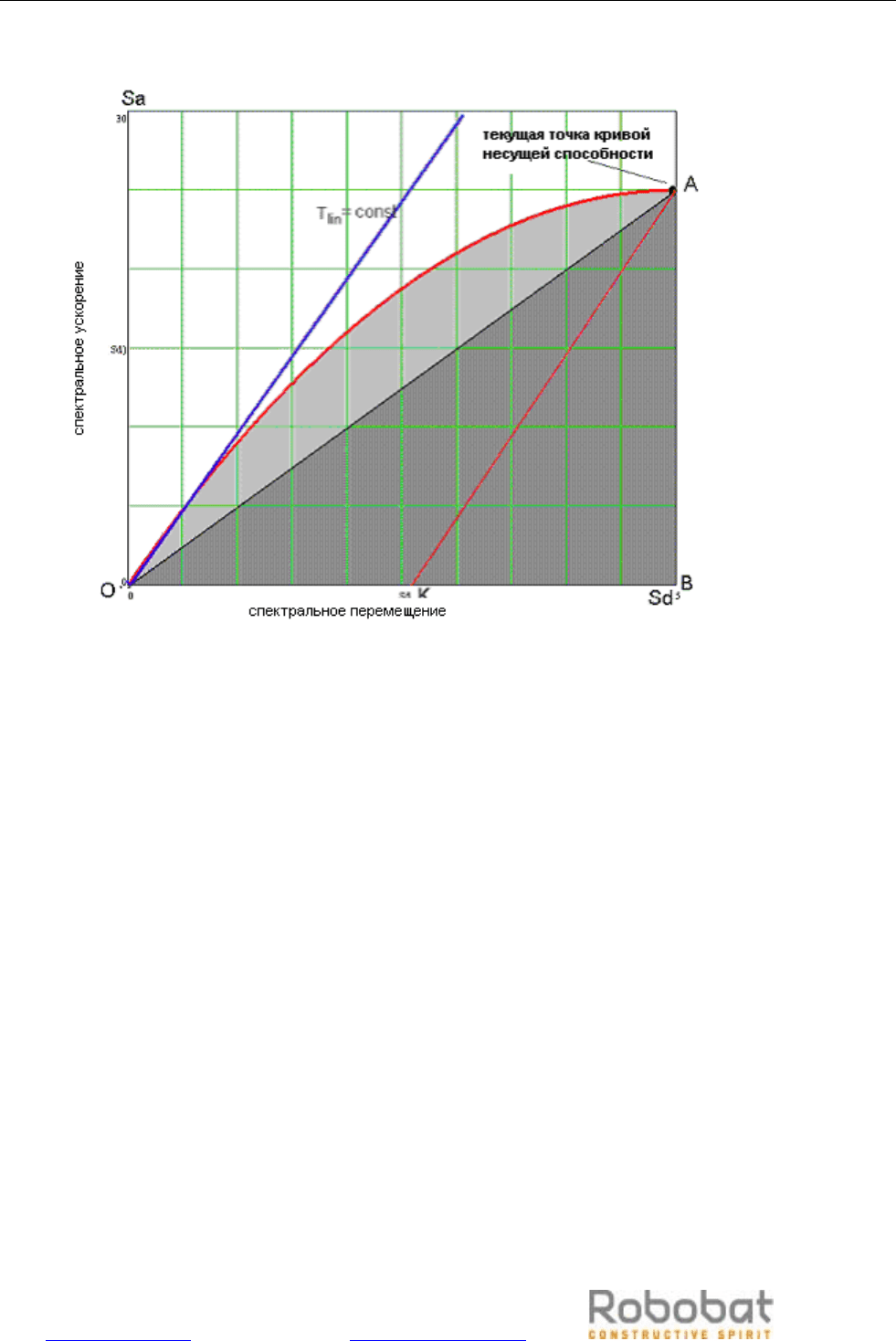
Рис. 10.5.3 Площадь криволинейной фигуры, ограниченной кривой несущей
способности )(
d
cap
a
cap
a
SSS = и линиями AKO, представляет собой ¼ площади параллелограмма
гистерезиса, и иллюстрирует энергию, рассеянную демпфированием за цикл. Площадь
треугольника OAB представляет максимальную работу деформации. AK параллельна прямой
постоянного периода T
B
lin
B = const.
Поэтому кривая несущей способности может быть представлена не только как
)(
d
cap
a
cap
a
SSS = , но и как βB
eff
B= βB
eff
B(T), так как каждая точка )(
d
cap
a
cap
a
SSS = соответствует
периоду T (смотри уравнение 10.5.3) и эффективному демпфированию β
B
eff
B (смотри 10.5.5-
10.5.7).
Интеграл (10.5.6) вычисляется численно для каждой точки )(
d
cap
a
cap
a
SSSA =∈ .
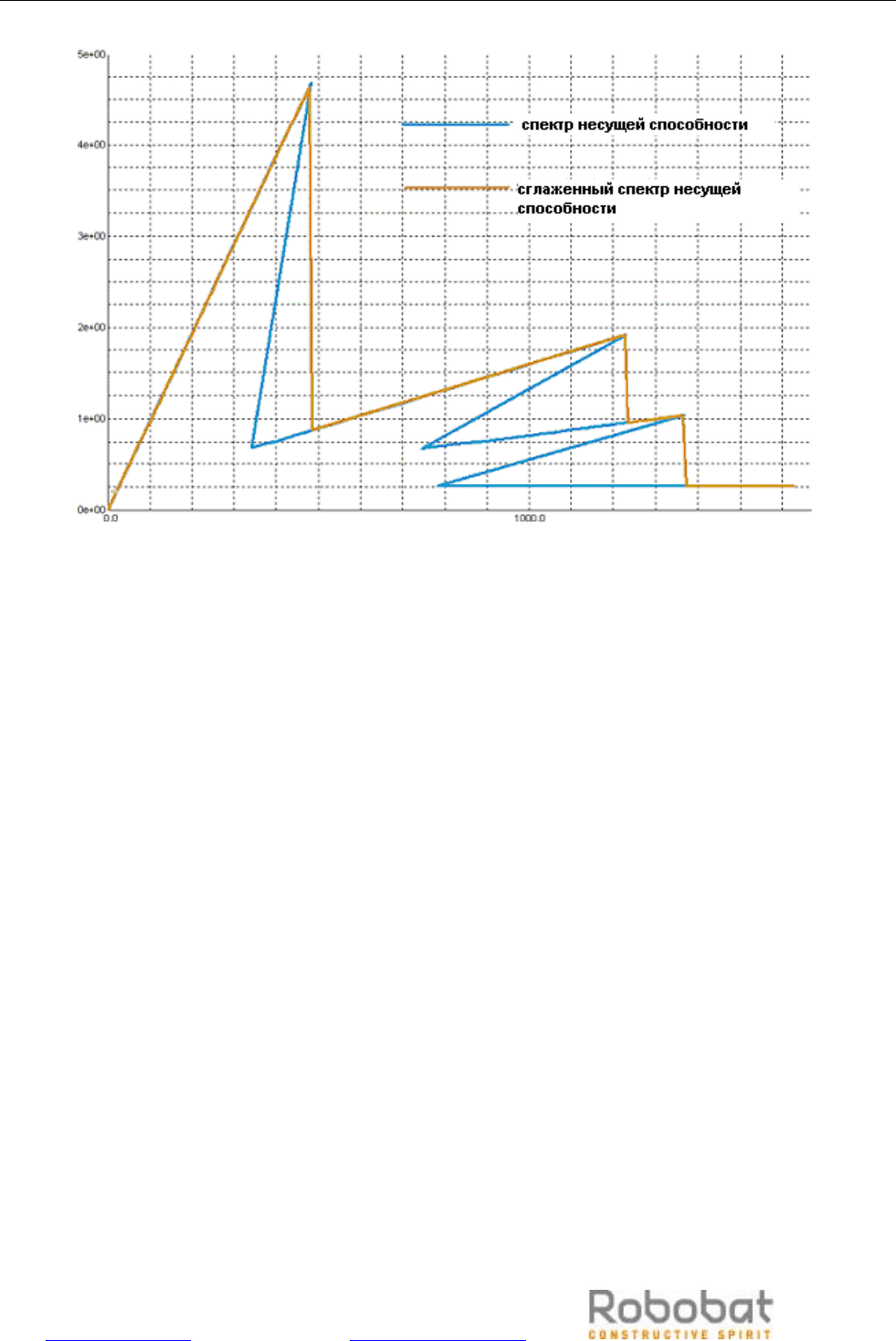
Применение алгоритма длины дуги позволяет получать очень сложные кривые несущей
способности с пилообразными реверсивными ветвями, вызванными ветвями деградации
характеристик нелинейных шарниров (смотри Рис. 10.5.4). Поэтому кривая несущей
способности )(
d
cap
a
cap
a
SSS = подвергается процедуре сглаживания перед численным
определением (10.5.5-10.5.7). Сглаженная кривая спектров несущей способности определена на
регулярной сетке; она является однозначной функцией, в отличие от исходной кривой несущей
способности. Такое свойство очень важно для правильной оценки (10.5.5-10.5.7). Таким
образом, для последующего анализа используется только сглаженная кривая спектров несущей
способности.
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 582 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
Рис. 10.5.4 Кривые спектра несущей способности и сглаженного спектра несущей
способности. Основаны на реальном примере.
Кривая запроса. Выбранная кривая запроса. Точка выносливости
При перемещении по нелинейной кривой несущей способности )(
d
cap
a
cap
a
SSS =
(],0[
MAX
dd
SS ∈ , где }sup{
d
MAX
d
SS = определяется последней точкой кривой состояний
равновесия), период T и эффективное демпфирование β
B
eff
B(T) изменяются. Поэтому каждая
точка на кривой несущей способности )(
d
cap
a
cap
a
SSS = (βB
eff
B= βB
eff
B(T)) определяет
соответствующую редуцированную (запрос) кривую спектра реакций )(
d
red
a
red
a
SSS = .
elastic
aA
red
a
SSRS ×= в диапазоне постоянных ускорений спектра, и
elastic
aV
red
a
SSRS ×= в диапазоне
постоянных скоростей спектра (смотри Рис. 8-14 из [2]).
elastic
a
S - спектры ускорений из спектра
упругой реакции (5% демпфирование).
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 583 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
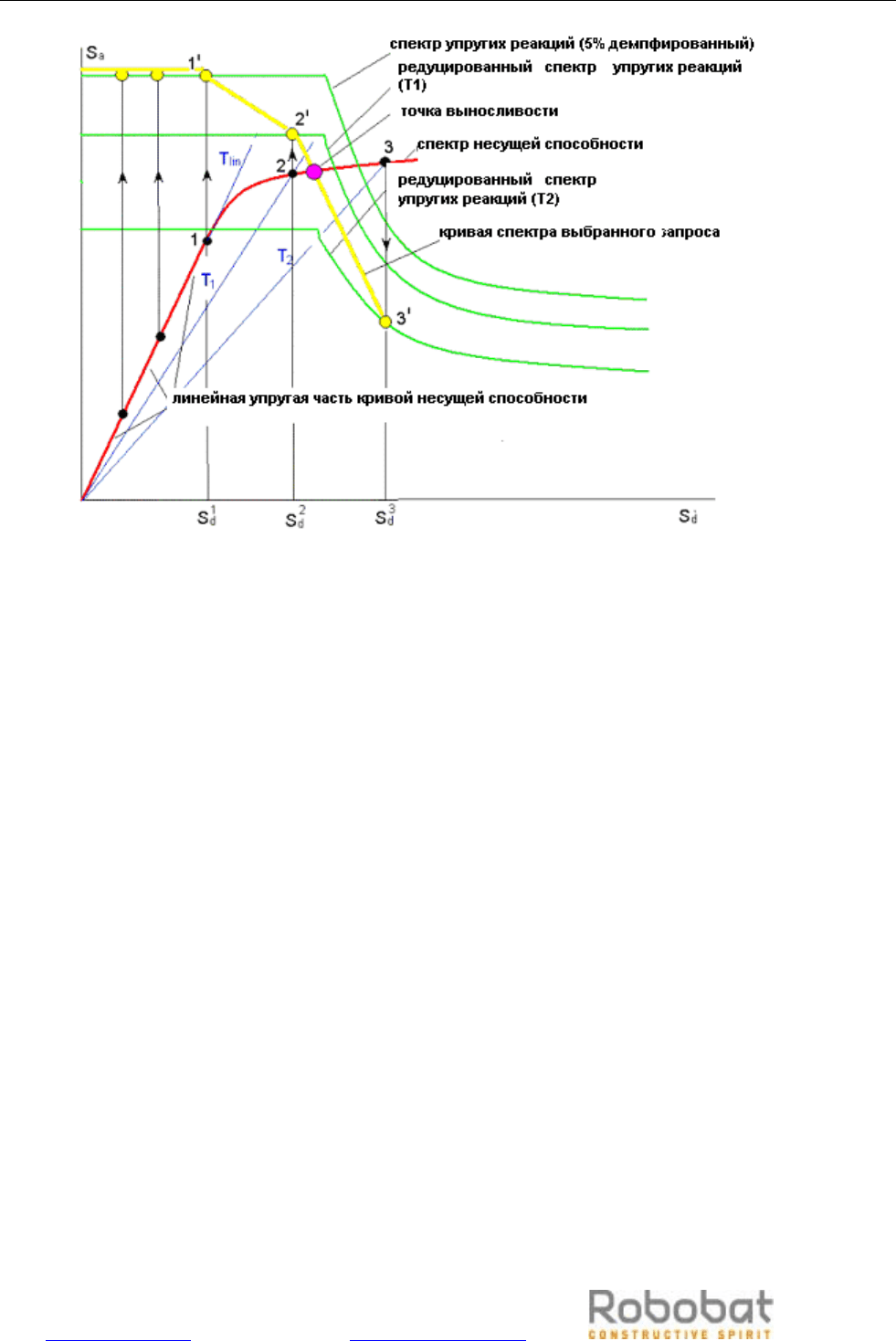
Рис. 10.5.5 Построение кривых спектров несущей способности, редуцированного и
выборочного запроса. Точка выносливости определяется как точка пересечения кривых
несущей способности и выборочного запроса.
Точку )(},{
d
red
a
red
ad
red
a
SSSSS =∈ , определяемую заданным значением SB
d
B из спектров
несущей способности )(
d
cap
a
cap
a
SSS = , будем называть выбранной точкой. Поэтому, двигаясь
вдоль кривой несущей способности )(
d
cap
a
cap
a
SSS = , мы получаем набор выбранных точек
},{
d
red
a
SS для ],0[
MAX
dd
SS ∈ , который называется кривой спектра выбранного запроса
)(
d
dem
a
dem
a
SSS = . Пересечение кривых несущей способности и выбранного запроса определяет
точку выносливости. Это поясняется схемой, представленной на Рис. 10.5.5. Пока точки
},{
cap
ad
SS принадлежат линейной части диаграммы спектра несущей способности, T = TB
lin
B ⇒ βB
eff
B
= 0.05 = 5%. Точка 1 проектируется на спектры упругих реакций как 1’. Таким образом,
спектры запроса для таких точек являются частью спектров упругих реакций от нуля до
предела линейного поведения. Для нелинейной части спектра несущей способности
необходимо определить:
{
}
},{,,},{
red
adVAeff
cap
ad
SSSRSRTSS ⇒⇒⇒
β
.
Точки 2, 3 определяют соответствующие проекции 2’,3’ на сходственные
редуцированные кривые спектров. Набор таких точек определяет кривую спектра выбранного
запроса. Пересечение кривых несущей способности и выбранного запроса определяет точку
выносливости.
Диалоговое окно кривой Предельного равновесия
Нажмите
Результаты / Углублённые / Кривая предельного равновесия для открытия
диалогового окна кривой предельного равновесия. Выберите опцию Смещение - сумма
реакций, чтобы показать диаграмму перерезывающая сила – управляющее смещение V = V(D)
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 584 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
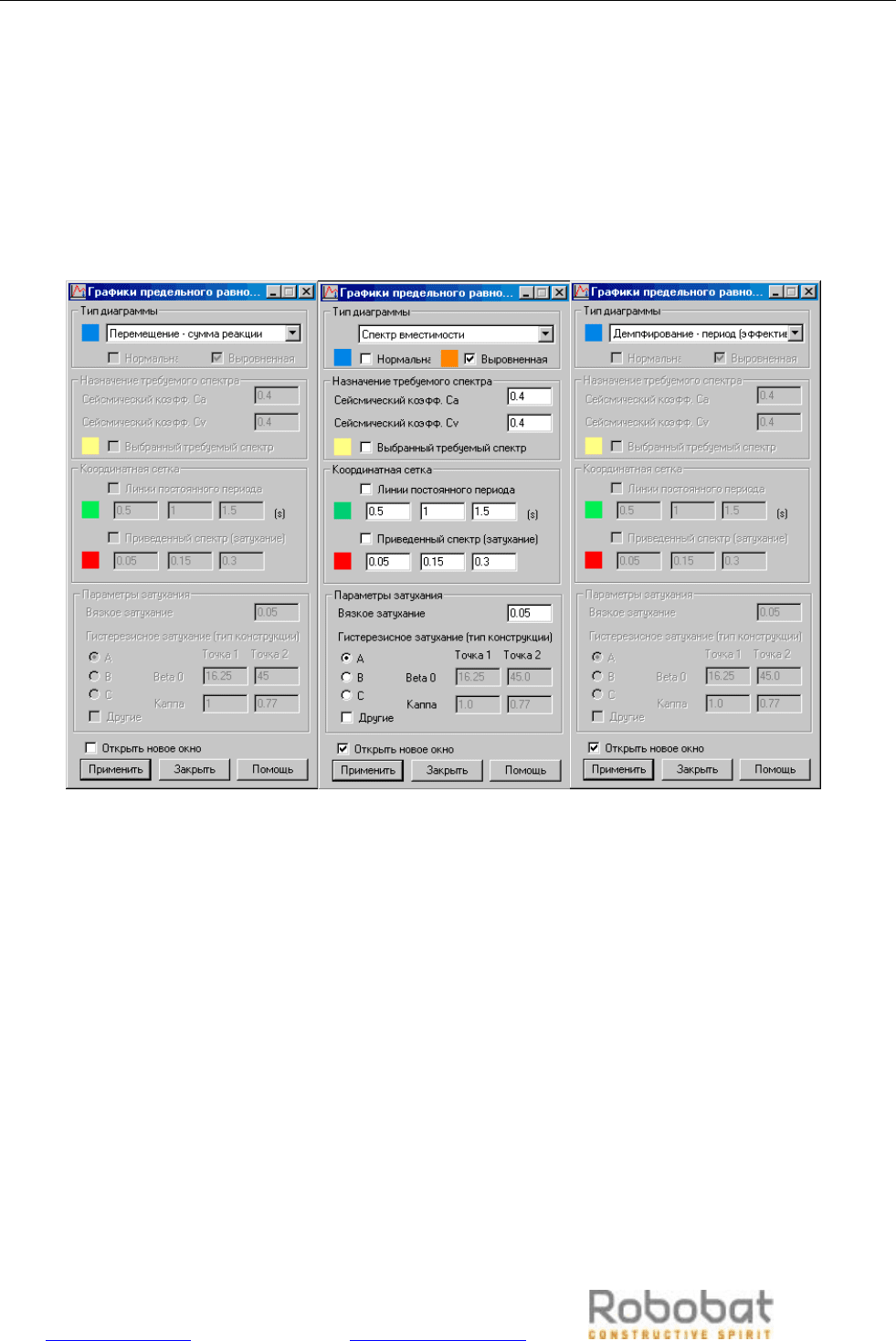
(Рис. 10.5.6.A). Выбор опции спектра несущей способности (Рис. 10.5.6.B) приводит к
вычислениям кривой спектра несущей способности )(
d
cap
a
cap
a
SSS = , сглаженной кривой спектра
несущей способности β
B
eff
B= βB
eff
B(T), кривой спектра выбранного запроса )(
d
dem
a
dem
a
SSS = , и к
поиску точки выносливости. Опции
Нормальная и Сглаженная позволяют выводить на экран
кривую спектра несущей способности и сглаженную кривую спектра несущей способности,
соответственно. Если опций
Спектр выбранного запроса включена, это приводит к появлению
на экране спектра выбранного запроса, который рассчитывается на основе сейсмических
коэффициентов C
B
a
B, CB
v
B и сглаженной кривой спектра несущей способности.
A B C
Рис. 10.5.6 Диалоговое окно Кривая Предельного равновесия
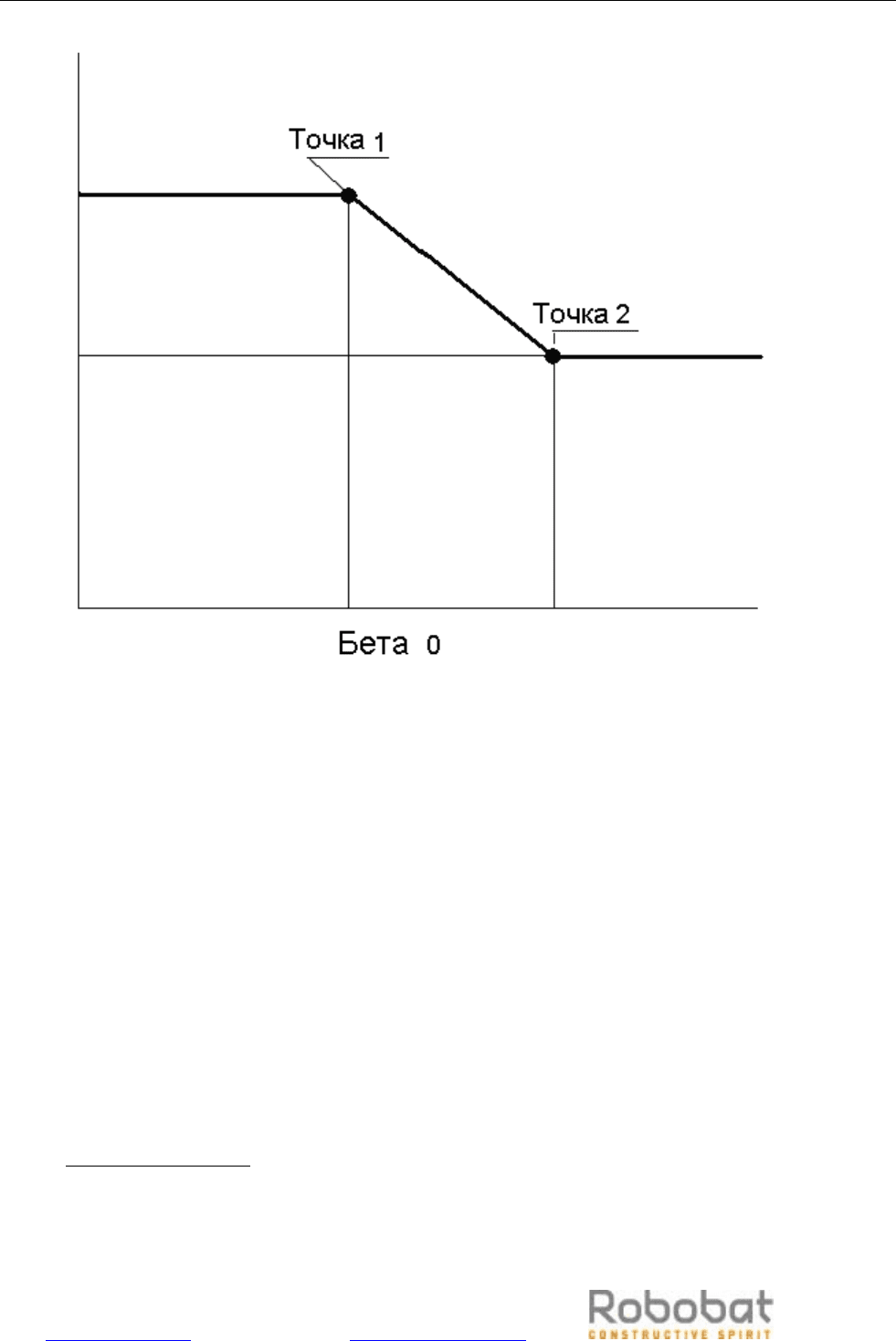
Параметры демпфирования конструкции позволяют задать вид поведения конструкции
(смотри [2)] и назначить каппа-фактор (смотри 10.5.7) согласно [2, Рис. 8-15] или по выбору
пользователя. Если пользователь желает назначить свои собственные зависимости κ = κ(β
B
0
B),
должна быть включена опция
Другие, и значения κ, βB
0
B, принятые по умолчанию, должны быть
откорректированы. Смысл Точки1 и Точки2 разъяснён на рисунке ниже.
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 585 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
Рис. 10.5.7 Интерпретация точки1 и точки 2
В текущей версии вязкостное демпфирование принято равным 5% (постоянная
величина).
Параметры вспомогательной сетки позволяют отобразить линии постоянного периода
(значения периода присваиваются в соответствующих полях редактирования) и
редуцированные кривые спектров для заданного эффективного демпфирования (значения
эффективного демпфирования присваиваются в подходящих полях редактирования). Такая
криволинейная сетка упрощает ориентацию
на плоскости SB
a
B, SB
d
B.
Координаты точки выносливости представляются под разделителем, если эта точка
найдена. В противном случае появляются нулевые значения. Для отображения координат всех
точек выносливости нужно щёлкнуть правой кнопкой мыши и выбрать опцию
Столбцы
таблицы
. Другие полезные графические операции доступны, когда нажата правая кнопка
мыши..
Опция
Демпфирование - эффективный период позволяет отобразить кривую βB
eff
B= βB
eff
B(T)
(Рис.10.5.6.C). Следует учесть, что все точки из линейной части кривой спектра несущей
способности отображаются на одну точку β
B
eff
B= βB
eff
B(T) с координатами: T = TB
lin
B, βB
eff
B= 0.05.
Список литературы
[1] FEMA 273, 1997, NEHRP Guildelines for the Seismic Rehabilitation of Buildings,
Developed by the Building Seismic Safety Council for the Federal Emergency Management Agency
(Report No. FEMA 273), Washington, D.C.
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 586 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
[2] ATC-40, Seismic evaluation and retrofit of concrete building, 1996.
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 587 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
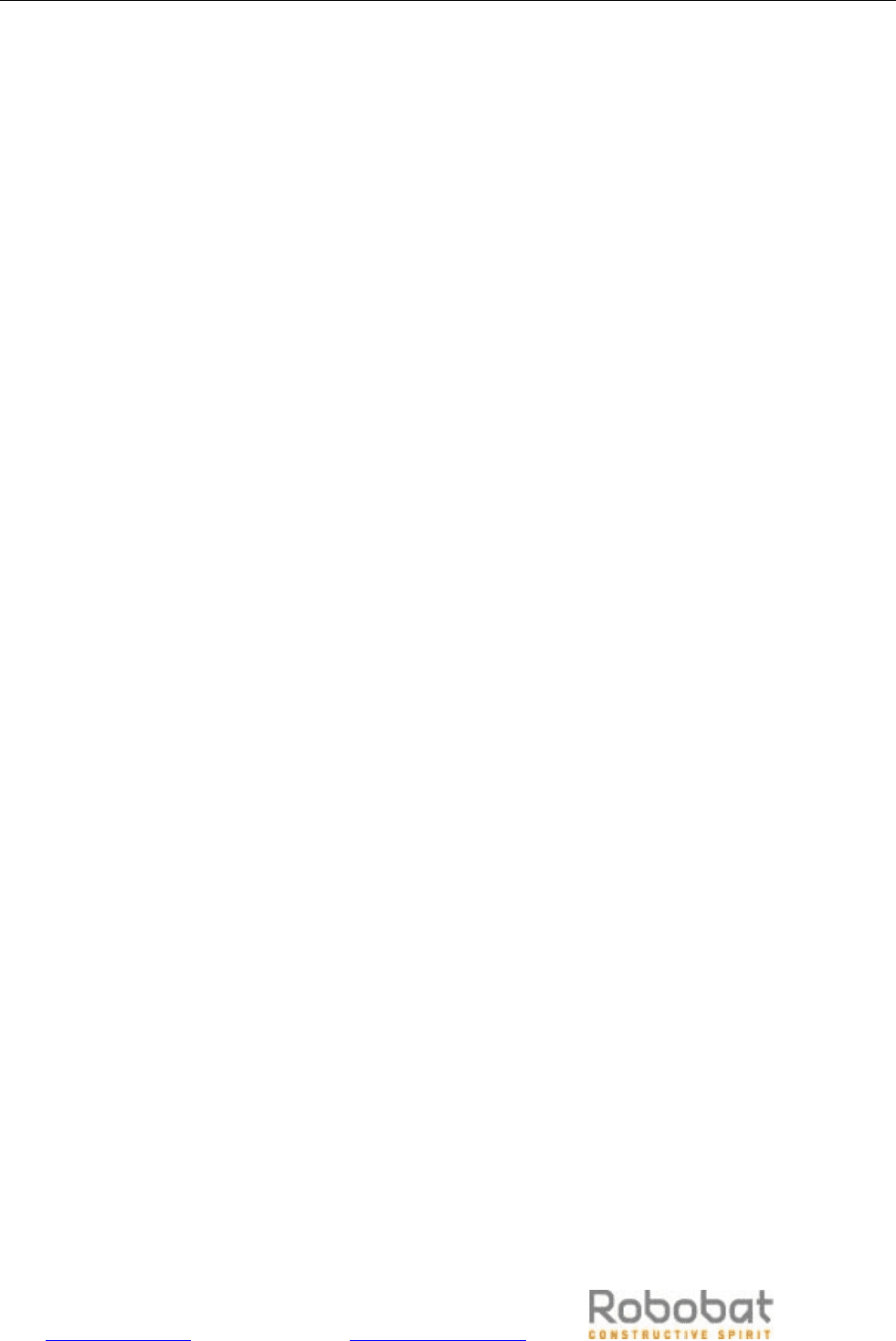
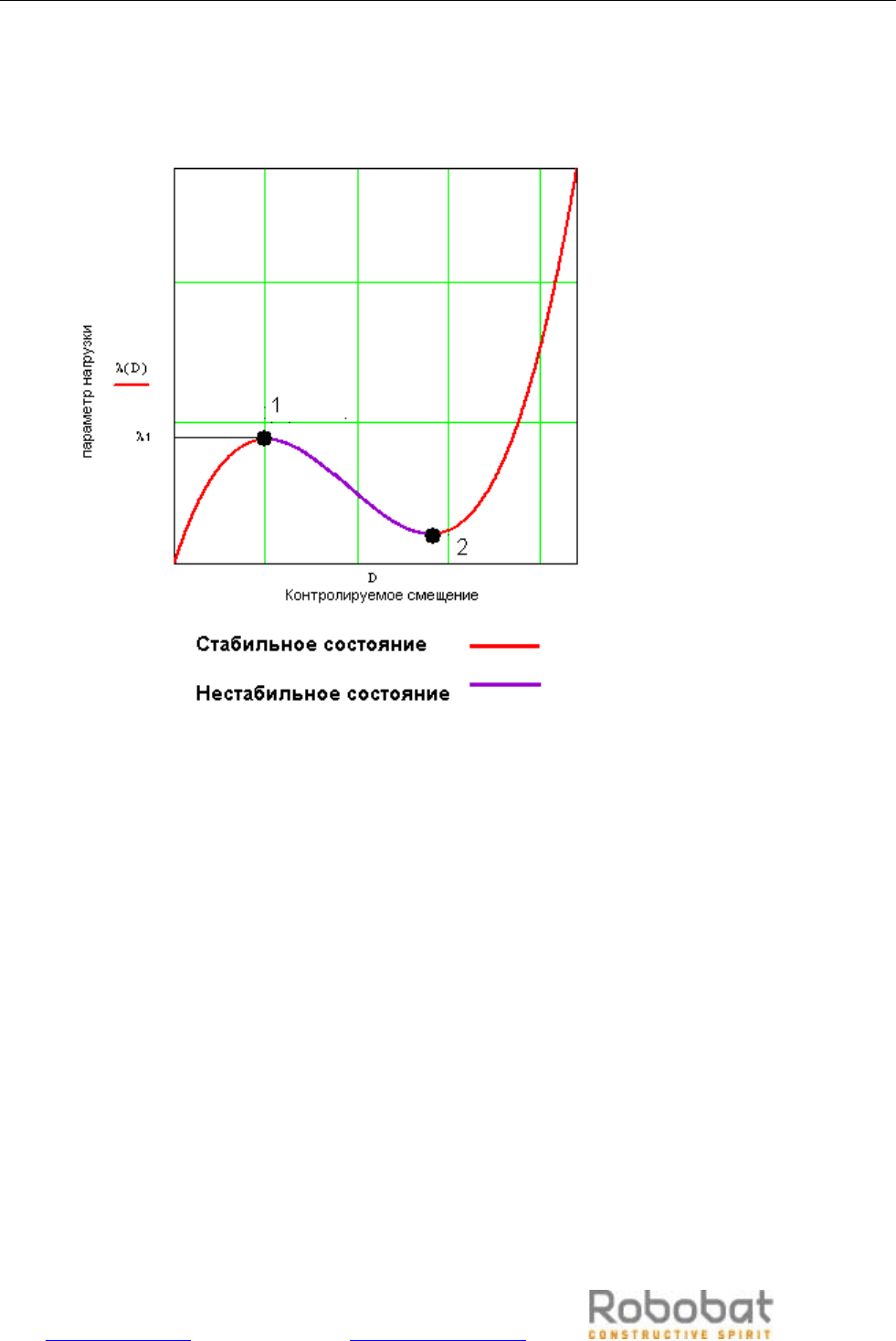
Управляющий метод длины дуги для нелинейного расчёта
Когда достигнута верхняя точка кривой равновесных состояний, инкрементный
алгоритм контроля усилий становится некорректным.
Рис. 10.5.8 Типичный вид кривой равновесных состояний с экстремальными точками
Подход управления усилиями может применяться, когда 0 ≤ λ < λ
B
1
B, где λB
1
B соответствует
точке экстремума 1. Если λ > λ
B
1
B, итерационный процесс управления усилиями становится
расходящимся.
Алгоритм длины дуги позволяет пройти все ветви состояний равновесия без каких-
нибудь серьёзных проблем. Применяется метод нормальной плоскости [1,2]. Нелинейный
алгоритм с разработанной стратегией длины дуги представлен ниже.
Входные параметры: λ
B
max
B – максимальное значение параметра нагрузки; DB
max
B –
максимальное значение управляющего смещения; NoSteps – число принятых инкрементов;
NoIter – число итераций равновесия; tol_F – допуск для нормы вектора невязок, tol_L – допуск
для параметра нагрузки.
• Начало инициализации
λ = 0
• Цикл по инкрементам нагрузки: n = 0, 1, …
nn
i
dd
d
R
=
=∆
=
=
+
0
1
0
0
0
~
0
0
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 588 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
где: )(
11
i
next
i
ni ++
−= dNFR
λ
- вектор невязки,
i
n 1+
λ
- текущее значение параметра нагрузки,
ext
F - внешняя нагрузка, )(
1
i
n+
dN - вектор внутренних усилий;
i
n 1+
d - вектор текущего смещения.
• Цикл по итерациям равновесия: i = 0, 1, 2, … < NoIter
extL
i
n
iterationeachonmatrixgentupdateo
r
iif
FdK
dKK
=∆
=
==
+
τ
ττ
)(
)____tan___0(
1
i
i
i
i
n
i
n
i
n
ext
i
i
next
i
ni
ioverloopbreakLtolandFtoleconvergencCheck
iif
dRdK
F
R
dNFR
~~
_______:_
)(
)0(
1
1
11
11
∆⇒=∆
⇒≤
−
≤
−=
>
+
−
++
++
τ
λ
λλ
λ
Задать
i
λ
∆
Обновить
i
i
n
i
n
1
1
1
1
,
+
+
+
+
λ
d
для следующей итерации
i
i
n
i
n
Lii
i
n
i
n
λλλ
λ
∆+=
∆∆+∆+=
+
+
+
+
+
+
1
1
1
1
1
1
~
dddd
Конец цикла по i
ntdisplacemegcontrollinD
noverloopbreakDDorif
i
n
__
____)__(
*
max
*
max
1
1
−
>>
+
+
λλ
Конец цикла по n
Стратегия длины дуги задаёт инкремент параметра нагрузки на каждом шаге итерации.
В начале решения (n=0; i=0) принимается
L
T
L
SNoSteps dd ∆∆+∆=∆=∆ 1_;/
0max0
λλλ
, где ∆S –
инкремент длины дуги. На начальном шаге каждой итерации (i=0; n>0)
L
T
L
S dd ∆∆+∆=∆ 1/
0
λ
,
и когда i>0, метод нормальной плоскости даёт
0
0
~
1
~
L
T
L
L
T
i
i
dd
dd
∆∆+
∆∆
−=∆
λ
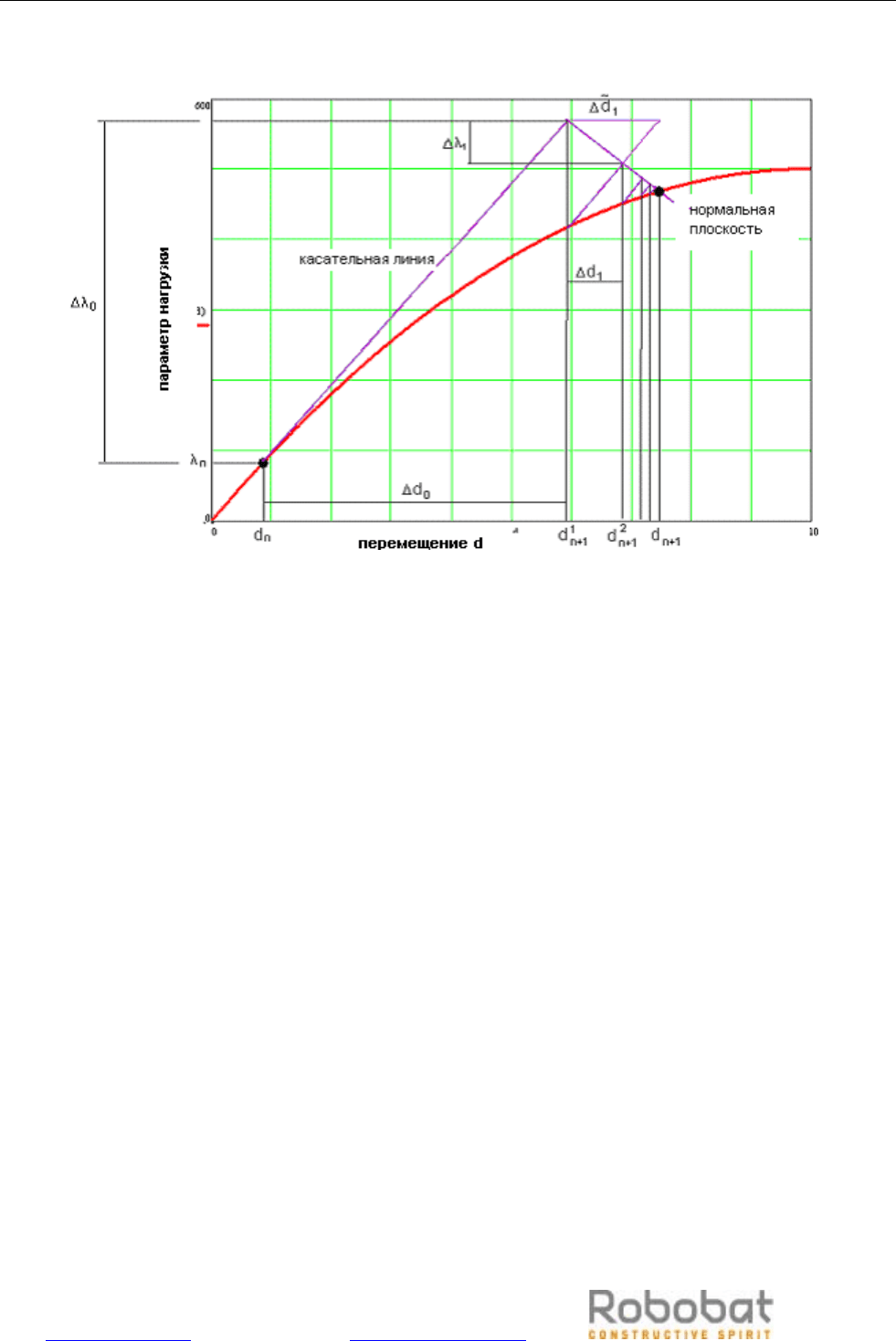
. Рис.10.5.9 иллюстрирует
метод нормальной плоскости с обновлением матрицы в каждом инкременте (идентично тому,
как это делается в модифицированном методе Ньютона-Рафсона).
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 589 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
Рис.10.5.9 Метод нормальной плоскости
Обозначим:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∆
∆
=
0
0
d
λ
τ
ρ
- вектор касательной;
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∆
∆
=
i
i
n
d
λ
ρ
- вектор нормали. Ограничение
для расчёта инкремента нагрузки
i
λ
∆
определяется в соответствии с методом нормальной
плоскости, и эта плоскость является нормальной к касательной на нулевом шаге итерации.
Условие ортогональности следующее:
0
=
⋅
n
ρ
ρ
τ
или
0
00
=
∆∆+∆
∆
ii
dd
λ
λ
, где
Liii
ddd ∆∆+∆=∆
λ
~
и
0
00 L
dd ∆∆=∆
λ
;
0
L
d∆
-
L
d∆
для нулевой итерации (i=0).
Такое условие ортогональности позволяет определить
i
λ
∆
, когда i= 1, 2, …
Можно показать, что детерминант |
Kτ| = 0, когда достигнута сингулярная точка
(граничная верхняя точка, или точка бифуркации). Выполняется следующее условие:
ii
RdK =∆
~
τ
. Когда заданная точка параметра нагрузки плиты – управляющее смещение, -
принадлежит кривой равновесного состояния,
0
~
=∆
i
dK
τ
, потому что вектор невязки 0
=
i
R
(условия равновесия выполняются в точности). Последнее выражение представляет
однородную систему линейных уравнений. Таким образом, если в какой-то точке |
Kτ| = 0, это
означает, что кроме тривиального решения
0
~
=∆
i
d существует нетривиальное. Детерминант
|
Kτ| меняет знак, если сингулярная точка пройдена. Разработанный алгоритм управляет
изменениями знака детерминанта |
Kτ|. Если сингулярная точка пройдена, соответствующее
предупреждение информирует пользователя о том, что текущее состояние равновесия
неустойчиво.
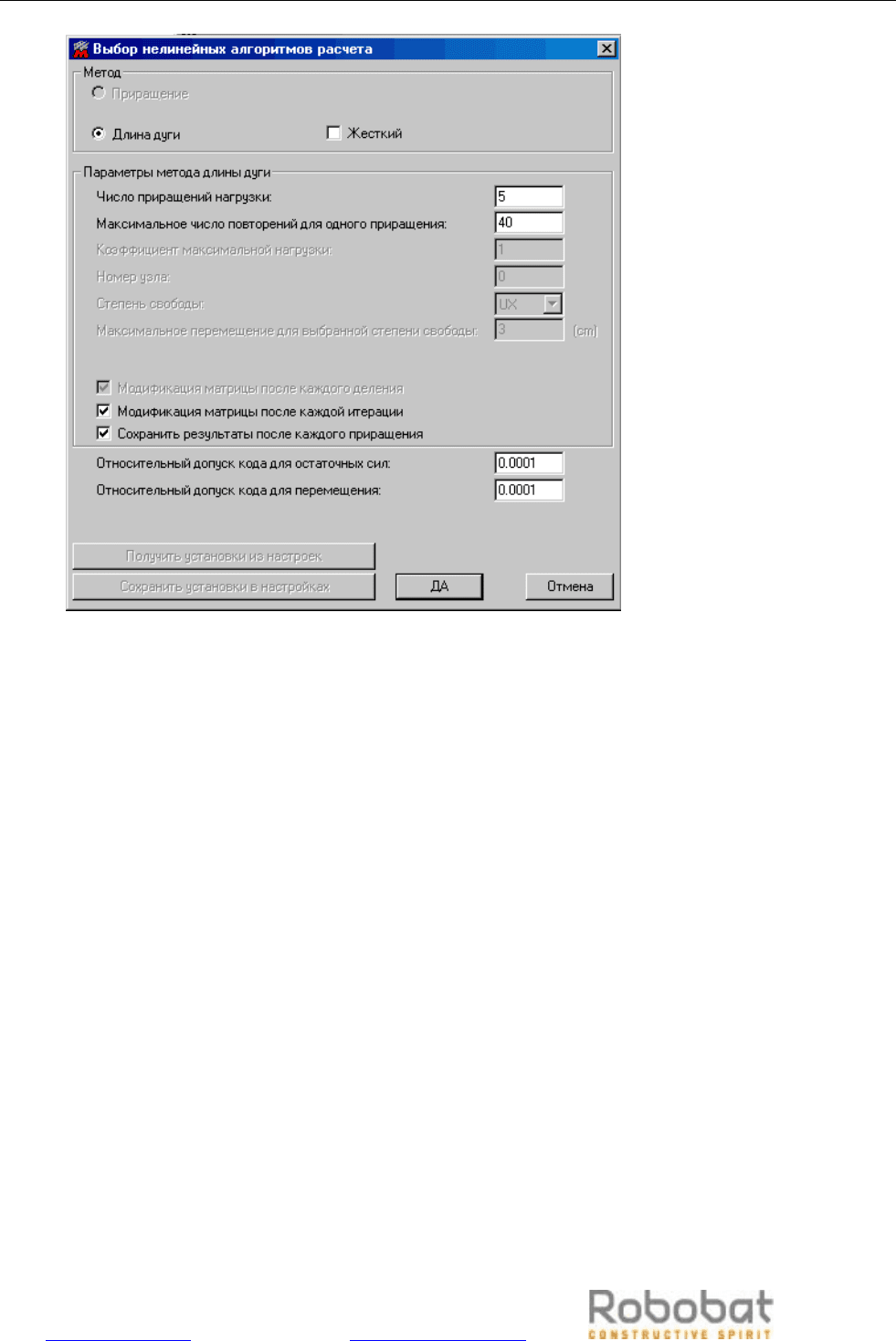
Параметры для метода длины дуги могут быть заданы в диалоговом окне, показанном
ниже.
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 590 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
Рис.10.5.10 Параметры метода длины дуги
Где: число инкрементов нагрузки - NoSteps; максимальное число итераций для одного
инкремента - NoIter; максимальный коэффициент нагрузки - λ
B
max
B; число узлов, степеней
свободы- назначает число узлов и направление для управляющего смещения; максимальное
смещение для выбранной степени свободы - D
B
max
B; относительный допуск для остаточных сил –
tol_F; относительный допуск для смещений – tol_L.
Метод длины дуги используется в нелинейном расчёте предельного равновесия и
настоятельно рекомендуется, когда модель VR” включает нелинейные связи. Пример
иллюстрирует возможности метода длины дуги, который позволяет пользователю получить
автоматически кривую такого сложного равновесного состояния (Рис.10.5.13), вызванного
деградирующими ветвями характеристик нелинейного шарнира (Рис
.10.5.12).