Robot Millennium (Версия 20.0). Руководство пользователя
Подождите немного. Документ загружается.

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 551 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
Нет, тогда сходящиеся собственные пары
сохраняются как окончательный результат, и
ледующи
тогда ите
вре
р
Штурма н выполняется
рассчитывается с й случай.
отменить, рации продолжаются, в то
мя как определяются все пропущенные частоты.
П едупреждение игнорируется.
Проверка Штурма не задействована –
проверка е
N
•
ω
еактивн
решения и для метод BLSI, SI, Лан
Н
то алгоритмов
ов цоша.
хся между :
тот N1
If(N1 <= N), вычислить
предупреждений.
В обоих случаях можно вывести число
сходящихся собственных пар сверх N1, но они будут
к окончательные результаты только
Все сходящиеся
Э доступно только для прямых
о (из-за
активно
го
Верхнег
о
Предела
)
Недоступно для метода сокращения базиса и для
всех итерационных методов решения.
Проверка Штурма выполняется в начале
вычислений
получено число частот N1,
содержащи нулём и Верхним Пределом
•
<<<<<
ωωωω
1
...0
21 N
If (N1 > N), пользователь предупреждается о
числе час . Если пользователь отвечает:
Да, это означает: вычислить
•
<<<<<
ωωωω
1
...0
21 N
Нет, это значит: прекратить вычисления
•
<<<<<
ωωωω
1
...0
21 N
без любых
сохранены ка
когда:
•
<<<<<
ωωωω
1
...0
21 N
.
собственные пары, которые превышают
•
ω
, будут
утрачены.
N Н
еактивн
о (из-за
А
ктивно:
0
Доступно для всех методов, использующих
прямые алгоритмы решения. Недоступно для
итерационных
% масс)
<%масс
<=
1
00%
неудовлетворительный, появляется
соответствующее сообщение. Никакие коррекции е
выполняются. В противном случае вычисления
выполняются в том же порядке, что и в первом
случае.
алгоритмов решения. Если % масс
н
2. Сейсмический режим
Такой режим доступен только для прямых алгоритмов решения -профильных или
разреженных.
В случае сейсмического и спектрального анализа не столь важно использовать
последовательно упорядоченные собственные пары, так как только те из них, которые дают
значительный вклад в сейсмическую реакцию (например, они имеют существенный
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 552 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
коэффициент участия масс), должны быть приняты во внимание. Поэтому проверка Штурма не
производится.
Вообще, метод Ланцоша обычно гарантирует сходимость количества собственных пар
значительно большую, чем N собственных пар в последовательно возрастающем порядке.
Когда пользователь хочет восстановить пропущенные собственные значения, ему/ей
необходимо получить число сходящихся частот значительно большее, чем первых N
желательных частот
. Например, типично, что метод Ланцоша выдаёт следующие сходящиеся
частоты
21181312101
,,,,
ω
ω
ω
ω
ω
ω
−
Когда пользователю требуются последовательно упорядоченные собственные пары, он
получит только первые 10. Последние 4 собственных пары попросту отброшены, равно как и
вклад массы соответствия. Сутью предложенного “Сейсмического” режима является то, что
учитываются все сходящиеся собственные (а не только первые последовательные). Это
гарантирует большую сумму масс по сравнению с “Модальным” режимом.
Доступные методы
: Метод Ланцоша.
Критерий сходимости:
tolrr
iiiiii
≤ΦΦ−Φ=
−
ρ
ρ
ρ
ρ
ρ
/;
12
MK
ω
;
i
Φ
ρ
- это i-й собственный
вектор; для текущей версии принято tol=1.0e-02.
Верхние Пределы игнорируются.
Текущий процент масс определён как среднее значение из M%x, M%y, M%z для 3-
мерных задач и как наименьшее из значений M%x, M%z для 2-мерных задач (M%x, M%y, M%z
являются текущими суммами масс для направлений x, y, z соответственно). Эта стратегия
объясняется тем фактом, что обычно очень трудно гарантировать достаточный процент масс
для вер
ных расчётах.
N
В
ерхние
Предел
ы
%
масс
Поведение программы
тикального направления. Можно проверить процент масс для каждого из направлений в
окончатель
моды
N
Н
еактив
но
еактивн
о
(
0)
пар. Проверка Штурма не производится. Число
сходящихся собственных пар всегда равно N.
Н
Вычислить N неупорядоченных собственных
N
Н
еактив
но
А
ктивно:
0
<%масс
<=
1
00%
N игнорируется. Вычисления продолжаются,
пока текущий процент масс не станет меньше
требуемого % масс или пользователь не будет
извещён подходящим сообщением о прекращении
вычислений, или же число сходящихся собственных
пар достигнет максимально возможного значения.
Этот набор значений определён внутри программы и
принят равным 100 в текущей версии
.
После каждых 20 шагов Ланцоша
программа заново рассчитывает число
сходящихся собственных пар и изменяет текущий
процент масс.
Пользователь получает
предупреждающее сообщение относительно
достигнутого процента масс. Пользователь может
отреагировать на это сообщение следующим
образом:
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 553 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
· Да: продолжать вычисления в течение
следующих 20 шагов Ланцоша и выводить это
сообщение снова, если требуемый процент масс не
достигнут (и число сходящихся собственных пар не
превышает максимально возможного значения)
· Нет: сохранить сходящиеся
собственные пары как окончательный результат и
передать их в следующий расчётный случай
· Отменить: игнорировать все
предупреждения в
будущем и продолжать
вычисления.
3. Псевдо-режим.
Такая опция доступна как для прямых, так и для итерационных алгоритмов решения.
Этот способ рекомендуется только для сейсмических расчётов и спектрального анализа,
когда Модальный и Сейсмический режимы всё ещё очень трудоёмки.
Модальный режим и Сейсмический режим используют собственные моды как базисные
векторы для представления сейсмической реакции, и можно требовать очень большого
количества собственных мод, чтобы гарантировать достаточную сумму масс для некоторых
трудных задач.
Псевдо-режим отвергает эту идею и генерирует для аппроксимаций Ритца самые низкие
собств
нного метода Ланцоша для итерационного
алгоритма решения. Это более эффективный метод
действия в большинстве случаев, потому
что требуется меньшее число базисных векторов, чем в случае модального режима. Это было
показа Псевдо-режим подобен “Векторам Ритца, зависящим от нагрузки”,
предложенным в [1-3] и применённым в SAP2000. Следует отметить, что Французские Нормы
PS -92 пус е
систем
ерхние Пределы игнорируются.
Текущий процент масс определён как среднее из значений M%x, M%y, M%z для 3-
мерных задач как наименьшее из значений M%x, M%z для 2-мерных задач (M%x, M%y, M%z
являются теку ими суммами масс для направлений x,y,z, соответственно). Эта стратегия
объясняется фактом
, что обычно очень трудно гарантировать достаточный процент масс для
вертикального . Можно проверить процент масс для каждого из направлений в
окончательных расчётах.
N
моды
В
% Поведение программы
енные пары при помощи векторов Ланцоша для прямых алгоритмов решения или
градиентного метода Ритца [8] и модифицирова
но E.L.Wilson [1-3].
до кают применение научно-обоснованных подходов, чтобы добавить некоторы
ы базисных векторов к существующим
собственным модам для увеличения суммы масс.
Подробности подхода псевдо-моды и её эффективности представлены в приложениях 3B и 3C,
соответственно.
В
и
щ
направления
ерхние
Предел
масс
ы
N
Н
еактив
еактивн
о
(
алгоритмов решения.
Генерировать N базисных векторов для
определения “рабочего” подпространства. Сохранить
но
Н
Доступно как для прямого, так и итеративного
0)
N базисных векторов для использования их в
сейсмических расчётах и спектральном анализе.
Этот
режим является рекомендуемым.
N
Н
А
Д
ост
у
пно только для п
р
ямых алго
р
итмов
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 554 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
<=
00%
определения “рабочего” подпространства. Сохранить
эти базисные вектора, которых достаточно для
Число
сохранённых базисных векторов меньше, чем N,
еактив
но
ктивно:
0
<%масс
решения
Генерировать N базисных векторов для
1
удовлетворения заданному % масс.
если % масс < 100%
3.6. Спектральный анализ
Ме
и
тод Спектров Реакции применяется для сейсмического и спектрального анализа.
Главная дея этого метода состоит в разложении конструкции с кратными степенями свободы
(MDOF) в систему осцилляторов с одной степенью свободы (SDOF). Затем программа
дой моды.
Классический подход - следующий:
вычисляет реакцию для каждого из этих независимых генераторов и статистическое
суммирование экстремальных реакций для каждого генератора методами SRSS, CQC, десяти
процентов и
удвоенной суммы [3, 21].
Собственные моды определяют эту систему SDOF-осцилляторов, когда применяются
режимы Модальный или Сейсмический. Базисные вектора псевдо-моды определяют эту
систему SDOF-осцилляторов, когда применяется режим Псевдо (смотри раздел 3.5).
Введение псевдо-режима требует нового подхода к оценке реакции для каж
iiadir
dir
ii
TSkx ΦΓ=
ρ
ρ
MK )(
max,
( 3.1.1 )
где K, M – матрицы жёсткости и масс, Γ – коэффициент участия масс, Sa – ускорение
спектров, T – период, i- номер моды, k - коэффициент спектрального масштабирования, dir –
индекс направления входного сейсмического движения (dir = X,Y,Z), x – вектор смещения для
максимальной реакции i-й моды.
Тогда применяется следующее (смотри приложение B):
i
i
iadirii
TSkx ΦΓ=
dir
~
1
ρ
ρ
)(
2
max,
ω
, ( 3.1.2 )
дег
i
Φ
~
ρ
означает
i
Φ
~
ρ
необязательно быть точной аппроксимацией
i
Φ
ρ
базисный вектор (для
- точного собственного вектора
0
2
=ΦΩ−Φ
iii
ρ
ρ
MK ),
i
ω
- аппроксимация точного собственного
значения
i
Ω
. Можно показать, что (3.1.1) даёт точно такое же решение
max,i
x
ρ
, как (3.1.2), если
ii
Φ=Φ
ρρ
~
(
i
ω
=
i
Ω
). Однако, (3.1.2) применимо не только к прямым алгоритмам решения, но
также и к итерационным, так как оно не требует процедуры решения, соответствующей
матрице жёсткости K. Это путь быстрее, чем (3.1.1), и он даёт возможность контролировать
результаты более надёжно (сумма усилий – сумма реакций).
Формула, представленная ниже, получена из (3.1.1)
i
i
iadir
dir
iiiadir
dir
ii
TSkTSkx Φ
Ω
Γ=ΦΓ=
−
ρ
ρ
ρ
2
1
max,
1
)()(
MK ( 3.1.3 )
Вектор модальной реакции
max,i
x
ρ
описывает экстремальную реакцию соответствующего
SDOF-осциллятора. Следующий шаг должен быть посвящён определению окончательной
реакции MDOF-конструкции посредством статистического усреднения между модами и между
направлениями сейсмических входов.
ROBOT (ранние версии) позволяет назначить несколько статистически независимых
направлений сейсмических входов с их собственными множителями масштаба в одном случае
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 555 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
нагруз роизводится посредством
комбинирования “суммы абсолютных значений” и “квадратного корня суммы квадратов”
комбинации в пределах каждой моды. Соответствующие опции определяются в “Настройках
Задания”.
Опция “Сумма абсолютных значений” даёт следующее:
ки. Статистическое усреднение между направлениями п
i
i
ia
dir
dir
dir
ii
TSkx Φ
⎟
⎠
⎞
⎜
⎝
⎛
Γ=
∑
ρ
ρ
2
max,
1
)(
ω
( 3.1.4 )
Опция “Квадратный корень суммы квадратов” выполняет усреднение
max,i
x
ρ
соответствующих направлений входных сейсмических движений наподобие
i
xxxx
,,max,
,,
()
ZiYi
SRSS
Xi,
ρ
ρ
ρ
ρ
=
.
i
i
iadirii
TSkx Φ
⎟
⎠
⎜
⎝
Γ=
∑
2
max,
)(
ω
dir
⎞
⎛
ρ
ρ
2
1
( 3.1.5 )
ющая
dir
Можно показать, что каждая составля
max,i
x
ρ
является SRSS – комбинацией
компонентов соответствия
Xi
x
,
ρ
,
Yi
x
,
ρ
,
Zi
x
,
ρ
,
,N – означает номер моды или псевдо-моды.
CQC между модами (или псевдо-модами) применяется для
получе ссматриваемой MDOF-конструкции после того, как
получе ных реакций, i =1,2,…,N.
где i =1,2,…
Комбинация SRSS или
ния окончательной реакции ра
ны усреднённые векторы модаль
Векторы усреднённых модальных реакций
max,i
x
ρ
, i =1,2,…,N являются одними и теми же
для оп ратный корень из суммы квадратов”, если для
текуще единственное направление сейсмического входа
(Напри
е) сохраняет вышеупомянутую процедуру
усреднения модальных реакций между направлениями сейсмических входов, однако, он
позволяет выполнить лучший подход. Рекомендуется определить единственное направление
сейсмического входа для каждого случая нагрузки, а затем применить либо SRSS-комбинацию
между направлениями (это соответствует Американским Регулирующим Руководствам), либо
так называемые комбинации “Newmark” (соответствующие Французским сейсмическим
Нормам PS-92
и Еврокоду-8).
Позвольте нам проиллюстрировать новые возможности следующего типичного примера.
В этом случае (единственное сейсмическое входное движение для каждого случая
нагрузки), типовые значения для масштабных множителей будут равны
Kx=1; Ky=Kz=0 для dir = X (случай нагрузки S_X)
Kx=0; Ky=1; Kz=0 для dir = Y (случай нагрузки S_Y)
Kx=Ky=0; Kz=0.7 для dir = Z (случай нагрузки S_Z; интенсивность вертикального
движения принята равной 2/3 интенсивности горизонтального движения)
Три случая нагрузки определены
для каждого статистически независимого
сейсмического входного движения. Модальная реакция для каждой моды будет такой же, как
(3.1.2) (i = 1,2,…,N; dir = X,Y,Z ).
Затем необходимо определить усредняющий коэффициент по всем для каждого
направления
ций “сумма абсолютных значений” и “квад
го случая нагрузки было определено
мер, Kx=Kz=0, Ky=1).
ROBOT (версия 12.2 и более поздни
модам
сейсмического входа:
{
}
dir
idir
RSRSSR = или
{
}
dir
idir
RCQCR =
где
dir
i
R - некоторый коэффициент (перемещение, усилие, напряжение,…) для i-ой моды
вследствие входного сейсмического движения в направлении dir, который соответствует
модальной реакции
max,i
x
ρ
(полученной из (3.1.2));

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 556 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
является результатом комбинации SRSS или CQC по всем рассмотренным модам
dir
(псевдо-модам).
Затем выполняется усреднение по всем активным направлениям сейсмического входа в
соответствии с выбранной опцией:
либо SRSS-комбинация:
R
222
RRR ++=
zyx
либо комбинации “Newmark”:
R
zyx
RRRR
±
±±=±
µ
λ
zyx
RRRR
±±±=±
µλ
zyx
RRRR
±±±=±
µλ
Опции Спектрального Анализа разрешают определение произвольного спектра
сейсми
Спектров Реакции применяется для сейсмического и спектрального анализа.
Сейсмический
ческого входного движения.
3.7. Сейсмический расчёт
Метод
расчёт выполняется на основе спектрального анализа (смотри раздел 3.6),
однако, ускорения спектра
(
)
iaa
TSS = генерируются, чтобы соответствовать выбранным
сейсмическим нормам, вместо того, чтобы быть назначенными пользователем (как это делается
для спектрального анализа).
В
ROBOT (версии 12.0 и более поздние) доступны сейсмические нормы UBC-97.
Спектр льныйа Анализ Реакций выполняется в соответствии с Разделами 1631.5.1 – 1631.5.3
Однородных Строительных норм 1997. Можно выполнить требования Раздела 1631.5.4
(“Пара ругой Реакции могут быть сокращены …”) посредством механизмов
комбин Помощь). Основные составляющие сдвига Vx, Vy, Vz,
компон а Mx, и My и крутящего момента Mz (принято, что ось
OZ вер
ны а таблице “Реакции” в строке “сумма усилий”, как
для ка . В
програ
DM 16.1.96
EC 8
IBC 2000
P100 92
Турецкие Нормы
Китайские Нормы
Аргентинские Нормы
Чилийские Нормы
EAK 2000.
3.8. Избирательные фильтры
Этот подход основан на следующем наблюдении: только моды, которые имеют
относительно существенный коэффициент участия массы, дают значительные вклады в
сейсмическую реакцию конструкции. Поэтому достаточно принимать во внимание только эти
метры Уп
ации ROBOT (смотри
енты опрокидывающего момент
тикальная) – все они
представле
ждой модальной реакции, так и для комбинаций SRSS и CQC между модами
рмы: мме доступны следующие сейсмические но
UBC97
PS 69 R. 82
AFPS
S 92 P
RPA 88
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 557 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
моды. Остальные моды (с небольшими коэффициентами участия массы) при выполнении
сейсмического анализа могут быть игнорированы. Число полученных мод обычно значительно
больше, чем число, получаемое путём оценки процента масс. Таким образом, дисковое
пространство и время вычислений можно сэкономить, если выбраны только моды со
значительными коэффициентами участия масс.
Могут быть использованы два пути
: создать список принятых мод для каждого
сейсмического входного направления (сейсмический случай) на основе результатов,
полученных для предварительно выполненного анализа форм колебаний, и назначить предел
массы - связанное значение для процента модальной массы (все моды с процентом модальной
массы ниже этого предела будут игнорироваться). Первый путь более эффективен, хотя он
требует проведения
предварительного анализа форм колебаний. Второй путь позволяет
применить фильтры в той же самой программе, выполняющей спектральный и сейсмический
анализ, однако, это обычно требует большого объёма дискового пространства и больших
вычислительных усилий.
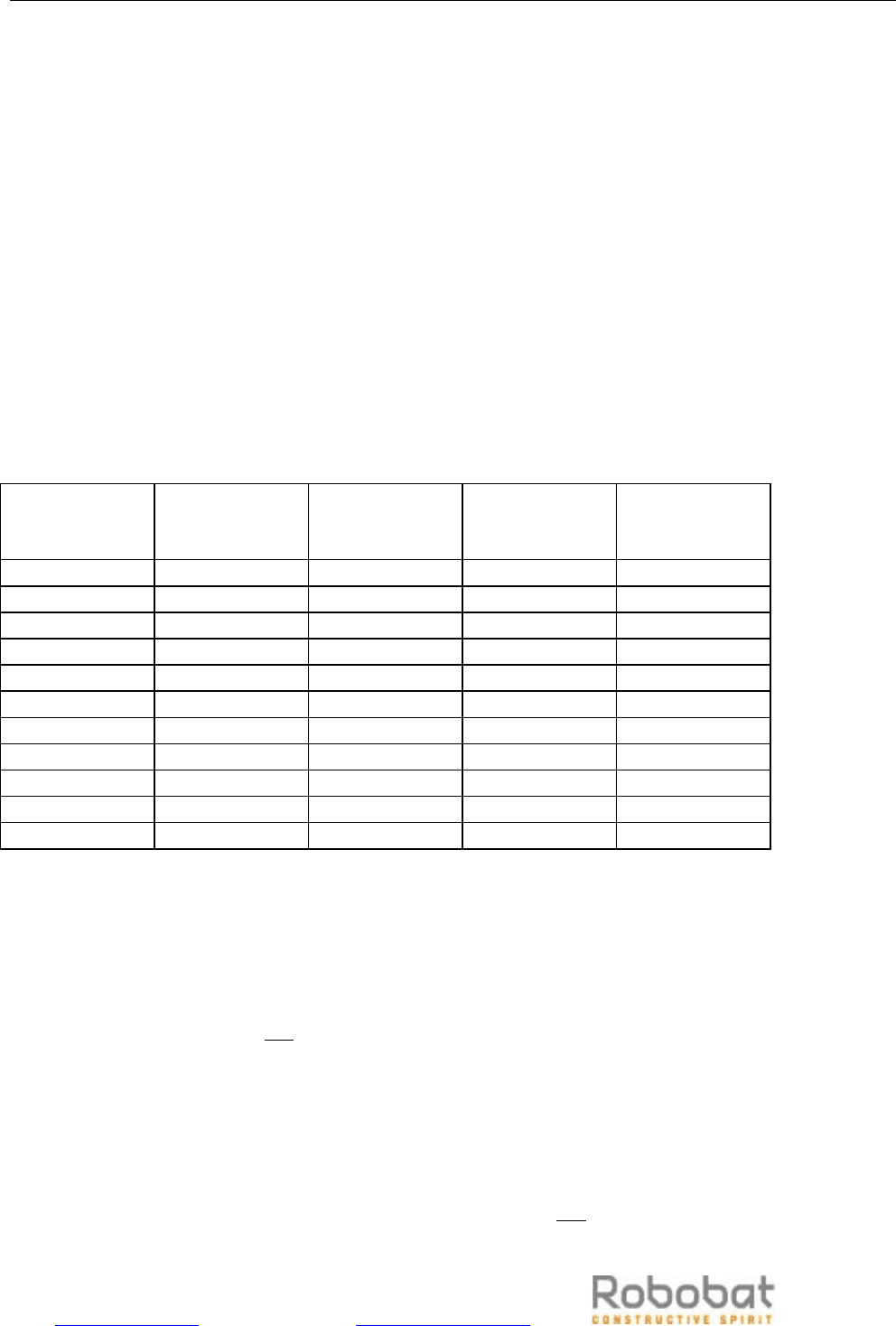
Рассмотрим другой пример. Результаты анализа форм колебаний представлены ниже, в
таблице 3.1, где сейсмические случаи определены следующим образом: Dir_X (Kx=1;
Ky=Kz=0), Dir_Y (Kx=0; Ky=1; Kz=0) and Dir_Z (Kx=Ky=0; Kz=1)
Таблица1
Номер
моды
Участи
е массы UX
(%)
Участи
е массы UY
(%)
Участи
е массы UZ
(%)
Период
1 0.05 12.01 0.004 0.803
2 67.43 0.06 0.005 0.705
3 0.002 0.08 0.07 0.686
4 0.001 0.008 0.009 0.650
5 25.4 0.07 2.06 0.590
6 0.09 68.5 5.05 0.540
7 0.08 10.3 0.06 0.490
8 0.07 0.06 0.56 0.460
9 0.05 0.07 30.56 0.420
10 0.08 0.06 0.25 0.380
11 0.06 0.01 26.7 0.270
Предположим, что мы принимаем во внимание все моды с коэффициентом участия
массы ного процента. Соответствующие значения участия масс даны в таблице.
Отмети ия сейсмических входов обозначены как ( 1 0 0) для случая
Seism_ ниями участия массы для направлений UY, UZ не дают
никако ю (смотри раздел 3.6):
больше од
м, что если направлен
X, моды с существенными значе
го вклада в сейсмическую реакци
iiadir
dir
ii
TSkx ΦΓ=
~
1
i
)(
2
max,
ρ
ρ
ω
,
где dir = X, Y, Z – направление сейсмического входа;
dir
i
x
max,
ρ
- максимальная реакция для i
–ой моды;
коэффициент участия массы;
dir
i
Γ
-
(
)
i
TSa - ускорение спектров;
i
Φ
~
ρ
- i-ый
собственный вектор или базисный вектор (в случае псевдо-моды). Скалярный множитель в
правой части вышеприведенной формулы
2
1
)(
i
iadir
dir
i
TSk
ω
Γ
определяет вклад i-ой моды в

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 558 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
сейсми кцию направления dir. В этом случае, где Ky = Kz = 0, значительные вклады
будут Остальные моды не дают вклада в сейсмическую реакцию из-за
нулево ) и небольших значений участия масс для направления
dir=X. образом - что для случая Dir_Y достаточно принять во
вниман
тров программа может принимать во внимание только
сущест ая Dir_X, 3 для случая Dir_Y и 4 для случая Dir_Z – без
сущест что мы вынуждены были бы применять 11 мод для
каждог фильтры.
тот подход позволяет уменьшить время вычислений для крупномасштабных
динамических задач (равно
как и потребности в дисковом пространстве и объёме данных для
последующей обработки) без существенного снижения точности результатов по сравнению с
традиционным методом (когда избирательные фильтры не используются).
Например, крупномасштабная задача PJG203 содержит 34 266 уравнений (ширина ленты
равна 990 после оптимизации). Соответствующая конечно-элементная модель представлена в
приложении 3D – смотри Рис.A1. Должны были быть рассчитаны 25
собственных пар с
консистентной матрицей масс и 3 сейсмических случая. Время расчёта по-прежнему достигает
приблизительно 50 часов на Pentium PRO (64 MB RAM, 200MГц). Требуемый объём дискового
пространства превысил 1Гб. Кроме того, возникла проблема с модулем проектирования
стальных конструкций, вызванная недостаточным объёмом дискового пространства. (Чтобы
рассчитать комбинации SRSS и CQC, необходимо было сохранить данные по 25 модам,
умноженные на 3 сейсмических
случая, включающие большое число степеней свободы для всех
факторов – перемещений, внутренних усилий, напряжений). Применение избирательных
фильтров позволяет программе успешно решить эту проблему.
3.9. Гармонический анализ
Получено следующее определение устойчивой реакции констру ции на действие
одногармонической нагрузки:
ческую реа
сделаны модами 2 и 5.
го множителя Kdir (dir = Y, Z
Можно показать – аналогичным
ие моды 1, 6, 7, тогда как для случая Dir_Z – моды: 5, 6, 9, 11.
Таким
образом, при помощи филь
венные моды - 2 для случ
венной потери вклада масс. Отметим,
о случая, если бы не использовали
Э
к
() ( )
tFtF
ϖ
sin
ρ
ρ
=
где
ϖ
- пульсация нагрузки возбуждения. Поведение конструкции описывается как
()
FX
ρ
ρ
=− MK
2
ϖ
,
где
X
ρ
- амплитудное значение вектора перемещений.
3.10. Анализ изменения во времени
В ROBOT реализован метод модальной декомпозиции метод (суперпозиции). Он
основан на представлении движения конструкции как суперпозиции перемещений независимых
видов Поэтому метод требует определения собственных значений и собственных
вектор омендуется метод Ланцоша. Метод модальной декомпозиции
исполь уравнений. Это целесообразный подход к
анализ рукций, подверженных
долговременному воздействию
динами нная работающим
поточн ческое воздействие). Математическое обоснование и
особен лены в [3,4,6].
ожет быть записано в виде:
k
kk
tPXX
1
)(
ϕ
колебаний.
ов. Для этой цели рек
зует преимущество сокращения несвязанных
у динамической реакции конст
ческих нагрузок (например, неустановившаяся нагрузка, вызва
ым оборудованием, или сейсми
ности применения представ
Уравнение (без демпфирования) м
∑
=
=+
Ng
ρ
ρ
&&
ρ
KM
(3.11.1)
де Ng - число „групп нагрузокг ”, )(
t
k
ϕ
- данная хронология времени для k-ой группы
нагрузок.

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 559 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
∑
Φ=
i
tqtX )()(
ρ
=
i
ρ
(3.11.2)
N
i
1
где
ii
tq Φ
ρ
ρ
),(
- соответственно i-ая нормальная координата и форма колебаний
(собств и добавление
демпф связанным модальным уравнениям [3,4,6]
енный вектор или вектор Ритца). Подстановка (3.11.2) в (3.11.1)
ирующих членов приводят к следующим не
∑
=++
kiiiiiii
tpqqq
,
)(2
ωωξ
&&&
,
=
(3.11.3)
Ng
2
k
1
де
(
)
ikki
tPtp Φ=
ρ
ρ
),()( , −
i
ξ
модальный параметр демпфирования (обычно
г
,
2.005.0
−
=
i
ξ
;
когда 1=
i
ξ
, это означает критическое демпфирование – граница, разделяющая колебательное
движение апериодического движения), от
i
ω
- частота собственных колебаний (пульсации),
i=1,2,…,N
Каждое из уравнений решается численно. Применяется метод второго порядка с
автоматическим выбором шага интегрирования. Результирующий вектор смещения для
определённых значений времени
получается подстановкой в (3.11.2).
Метод модальной декомпозиции может применяться для анализа сейсмической реакции.
В таком случае уравнение движения приобретает следующий вид
s
tttt ,...,,
21
= )(
si
tq
)(tIXX
gdir
ϕ
ρ
ρ
&&
ρ
MKM −=+
(3.11.4)
и подходящие несвязанные модальные уравнения –
(3.11.5)
е
)(2
2
tqqq
g
dir
iiiiiii
ϕωωξ
Γ−=++
&&&
(
)
idiri
I Φ=Γ
dir
ρ
ρ
гд
, коэффициент уч массы для i- моды направления
сейсмического входного воздействия
dir. Каждая мода должна быть нормализована следующим
образом:
()
1, =ΦΦ
ii
M - астия ой и
ρ
ρ
M . Окончательно все результаты (перемещения, скорости, ускорения,
внутренние усилия, реакции и т.п.) записываются только для определённых моментов времени
s
tttt ,...,,
21
= . Высокопроизводительный постпроцессор позволяет анализировать результаты
изменения во времени как в диаграммном, так и в табличном режимах. Диаграммный режим
отображает выбранные факторы (перемещение, ускорение, скорость, реакции, перерезывающие
силы, изгибающие моменты и т.п.) для выбранных DOF (степеней свободы) и представляет
форму деформации конструкции в выбранный момент времени. Табличный режим даёт
возможность не
только видеть соответствующие значения, но также отыскивать автоматически
максимальные и минимальные значения среди факторов реакции по всем записанным
моментам времени.
3.11. Анализ форм колебаний с учётом статических усилий
относительно состояния статического
равнов зкой. Статические силы, как известно,
оказывают влияние на частоты собственных колебаний. Обычный “Анализ форм колебаний” не
принимает такое влияние, а “Анализ форм колебаний с учётом статических
усилий
Рассматриваются линейные малые вибрации
есия, вызванные данной статической нагру
во внимание
” - учитывает.
Полностью нелинейные уравнения описывают движение относительно состояния
статического равновесия системы
, вызванное данными статическими нагрузками.
(
)
b(t)x(t)x(t)x
ρ
ρρ
&&
ρ
=++
LKM (3.12.1)

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 560 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
где M, K – матрицы масс и жёсткости,
(
)
(t)x
ρ
L - нелинейный оператор, b(t),x
ρ
ρ
- вектор
смещения и вектор нагрузки. Процедура линеаризации состоит в следующем:
)(xx (t)x
dst
t
ρ
ρ
ρ
+= (3.12.2)
где
st
x
ρ
является частью общего решения, которое описывает состояние статического
равновесия, а )(x
d
t
ρ
- вектор малых динамических перемещений. Нелинейный оператор может
быть представлен разложением в ряд Тейлора
()( )()
)(x)x(x)(xx(t)x
dststdst
tt
s
ρ
ρ
ρ
ρ
ρ
ρ
KLLL
+
≈+= (3.12.3)
где
i
s
x∂
=)x(
st
K
матрица напряжений-жёсткости, которая является Якобианом и
принимает во внимание действие статических усилий. Отсюда получаем:
∂ (...)
L
ρ
(
)
()
bxx
bxx(t)x)x((t)x(t)x
stst
ststdstdd
ρ
ρρ
ρ
ρ
ρ
ρρρ
&&
ρ
=+
=++++
LK
LKKKM
s
(3.12.4)
Первое выражение - результат линеаризации соответственно малых динамических
перемещений (примечание: )(x
st
tf≠
ρ
, так что 0x
st
≡
&
&
ρ
), а второе описывает нелинейное
состояние статического равновесия. Поэтому малые динамические движения относительно
состояния статического равновесия описываются следующим образом:
KM (3.12.5)
0(t)x)x((t)x(t)x
dstdd
=++
ρρρ
&&
ρ
s
K
Сделаем подстановку
ti
d
e(t)x
ω
Φ=
ρ
ρ
. Проблема собственных значений возникает из
(3.12.5)
()()
0x
2
=Φ−Φ+
iiists
ρ
ρ
ρ
MKK
ω
(3.12.6)
д
- собственное значение
е
i
ω
;
i
Φ
ρ
г
- собственный вектор.
. Линейный (3.12.7) или нелинейный (3.12.8) анализ статического напряжённого
состояния, вызванного данной статической нагрузкой
Вычисления производятся в два этапа:
1
bx
ρ
ρ
=
K
st
(3.12.7)
()
xx
stst
b
ρ
ρρ
+ LK =
, (3.11.8)
b
ρ
где
st
x
ρ
- неизвестный вектор статического состояния, - вектор заданных статических
усилий статической нагрузки), K – матрица жёсткости (вектор ,
(
)
b,x
ρ
ρ
st
L - нелинейный оператор.
Вектор статической нагрузки
b
ρ
может быть результатом комбинации нескольких статических
нагруз т заметить, что линейный подход не удовлетворяет точно уравнению
нелине 1.8). Таким образом, вектор
ок. Следуе
st
x
ρ
йного равновесия (3.1
для состояния статического
равнов решения, а матрица напряжений-жёсткости
sts
x
есия является результатом приближённого
()
ρ
K риваемая конструкция достаточно жёсткая, а содержит ошибку. Если рассмат