Robot Millennium (Версия 20.0). Руководство пользователя
Подождите немного. Документ загружается.

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 521 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
Пр
Millennium
, который позволяет добавлять тексты для
шаблонов страниц, сохраненных в
диалоговом окне
Параметры страницы,
последовательным элементам печати. После задания
и шаблона в контекстном меню данное имя
помещается перед элементом печати (элементами),
которые при печати используют данный шаблон.
Например (см. рисунок ниже), при печати данных по
нагрузке будет использован шаблон ‘шаблон’, а
значения ветровой/снеговой нагрузки – по шаблону,
имечание после -
запускает текстовый редактор системы
ROBOT
размещения после выбранного объекта (выделенным)
на правой панели, то есть содержащимся в отчете
назначениеШаблон страницы -
имен
называемому ‘новый шаблон’.
По умолчанию существует шаблон печати ‘без имени’,
дост ный в программе
ROBOT. Он применяется, если
не заданы пользовательские шаблоны.
уп
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 522 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
находятся названия пользовательских образов
8.2.2 Закладка Образ экрана
Закладка Образ экрана диалогового окна Формирование выходных данных разделена на
две панели: левую и правую. На левой панели
экрана. Образ экрана может быть получен посредством команды в меню Файл /Образ экрана
или нажатием на иконку
.
ПРИМЕЧАНИЕ: Возможно также «фиксировать» содержание таблицы, за исключением случая,
когда таблица находится в режиме редактирования.
Правая панель содержит полный отчет, составленный пользователем из объектов,
доступных на левой панели. Созданные образы экранов добавляются в отчет при нажатии
влению в отчет только того
образа (выделен) на левой пане
Имеется ль инструменто нели. Она была описана в
предыд главе
В средней части гового ок ходится кн
ставить и а. При нажатии
опция зволяет загруз бой файл . Могут загружены файлы формата
*.rtf.
кнопок
Все и Добавить. Нажатие кнопки Все приводит к передаче всех элементов из левой
панели на правую, а нажатие кнопки
Добавить приводит к доба
экрана, который выбран
небольшая пане
.
ли.
в на правой па
ущей
опка
В з файл
диало на на
по ить лю в отчет быть также

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 523 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
8.2.3 Закладка Шаблоны
Закладка Шаблоны в диалоговом окне Формирование выходных данных разделена на
две панели. Левая панель содержит шаблоны всех отчетов, имеющихся в программе. Шаблоны
содерж
Если пользователь создает шаблон и
называет его уже существующим именем (имя изменит
цвет на черный – цвет шаблона пользователя), затем удаляет шаблон, то имя не будет удалено
(цвет будет изменен на голубой), а содержание шаблона будет восстановлено.
Средняя часть диалогового окна содержит следующие кнопки.
Новый - новая строка будет добавлена в поле Доступные шаблоны. Здесь будет введено
новое имя шаблона. Как только имя вставлено, и нажата клавиша Enter, все компоненты,
содержащиеся на правой панели диалогового окна, будут сохранены в шаблоне.
Открыть – компоненты, определенные в выбранном шаблоне, будут перемещены на
правую сторону панели диалогового окна.
Сохранить - все компоненты на правой стороне панели будут сохранены как шаблон с
заданн
В средней части диалогового окна находится кнопка
Вставить из файла. При нажатии
опция позволяет загрузить любой файл в отчет. Могут быть загружены также файлы формата
*.rtf.
При открытии шаблона открывается (после того, как нажата кнопка
Открыть)
небольшое ниже. Если опция Стандартный шрифт
заголовка компоненты неактивна (это настройка по умолчанию), то шрифт заголовков
отдельных компонентов распечатки будет идентичен шрифту открытого шаблона. Если опция
активна, заголовки будут представлены шрифтом, назначенным пользователем в диалоговом
окне
Настройки.
Если опция Заменить существующие компоненты включена (это настройка по
умолчанию), то элементы выбранных шаблонов будут помещены в распечатку, а
существующие элементы будут удалены. Если опция выключена, то элементы выбранных
шабло т добавлены в конец с
ат виды/чертежи конструкции, таблицы данных/результатов. Некоторые шаблоны
имеют активный узел/стержень. Предопределенные шаблоны представлены на левой панели
голубым цветом. Они не могут быть перемещены, хотя пользователь может переписывать их.
ым именем.
диалоговое окно, представленное
нов буду уществующей распечатки.
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 524 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
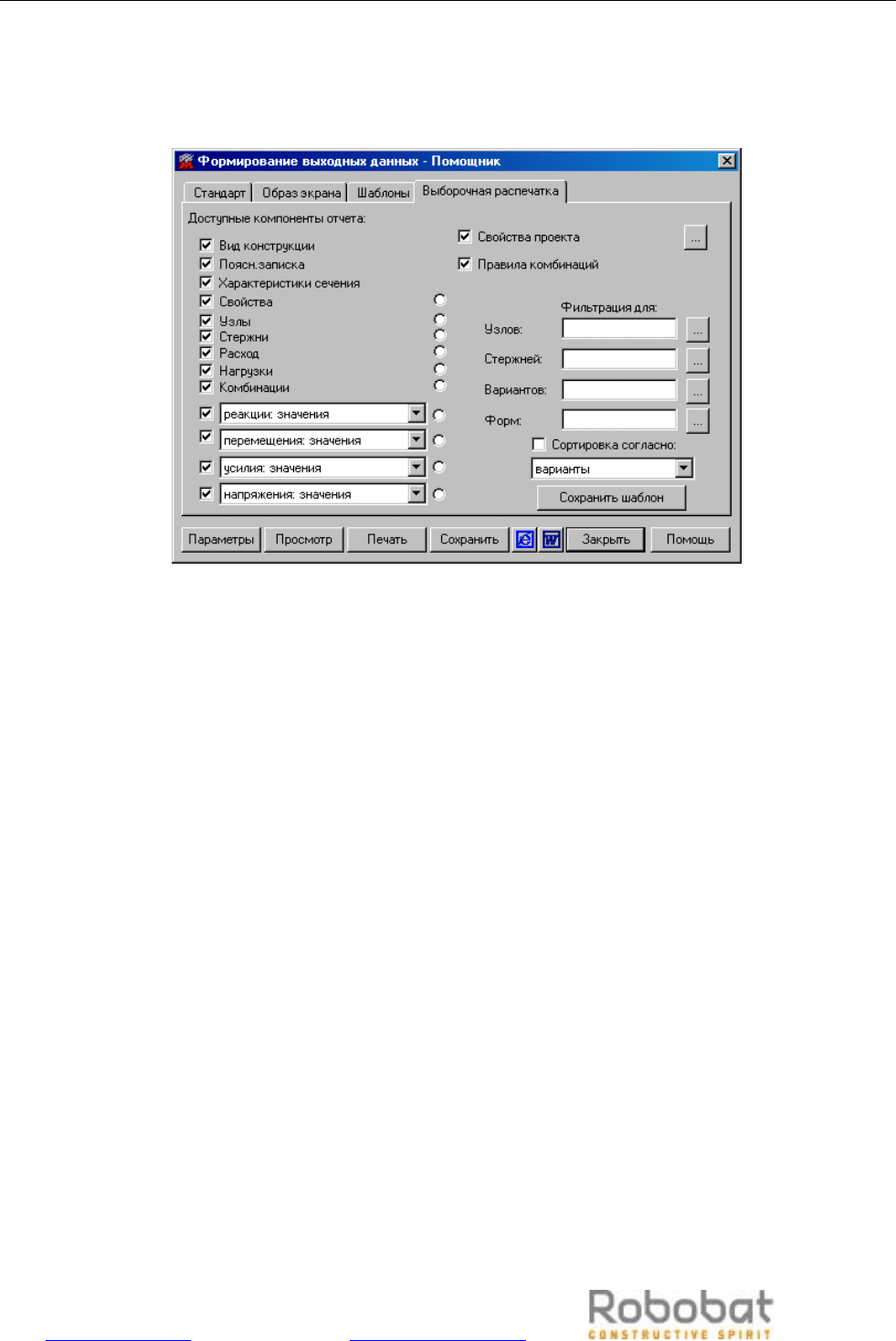
8.2.4 Закладка Выборочная распечатка
Когда выбрана закладка Выборочная распечатка, то диалоговое окно Формирование
выходных данных
приобретает форму, представленную на рисунке ниже.
Чтобы создать шаблон упрощенного отчета, необходимо:
выбрать значения, которые дол чете;
тфильтровать узлы, стержни или варианты нагружений, для которых будет создан
т;
визировать сорти
диал
диалогового окна содержит элементы и значения, которые могут быть
включ
п
ия (добавление пояснительной записки с точными характеристиками
сечения), свойства (добавление таблицы Свойства со всеми ее закладками), узлы, стержни,
расход материала, нагрузки, комбинации, реакции перемещения, усилия и напряжения.
Возмож лицы
ий, у
жны содержаться в составленном от
о
отче
акти ровку в случае необходимости
нажать на кнопку Сохранить шаблон, что приведет к активизации закладки Шаблоны
огового окна
Формирование выходных данных и расположению выделенных
элементов упрощенного отчета на правой панели. Пользовательский шаблон
упрощенного отчета может быть сохранен.
Ниже находится пример этапов для последовательного создания упрощенного отчета.
ЭТАП 1
Левая часть
ены в отчет. Здесь находятся: вид конструкции (добавление образа экрана конструкции в
3D проекции с
сечениями), пояснительная записка (добавление сокращенной ояснительной
записки доступной из меню Расчет / Пояснительная записка / Сокращенная записка),
характеристики сечен
ны следующие три типа печати таб для реакций
, перемещен силий и
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 525 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
емумы.
На правой части диалогового окна находятся две дополнительные опции:
Свойства проекта – включение опции (см. описание ниже) означает, что содержимое
записки, как определено в опции Файл / Свойства проекта, будет добавлено к распечатке.
Нажатие кнопки (
...), расположенной справа от опции, открывает диалоговое окно Параметры
проекта
;
Правила комбинаций - включение опции (см. описание ниже) означает, что содержимое
записки, как определено в опции Нагрузки / Правила комбинаций, будет добавлено к
распечатке. Нажатие кнопки (
...), расположенной справа от опции, открывает диалоговое окно
Правила комбинаций.
Слева от каждой из вышеупомянутых опций находится поле (флажок), которое
определяет порядок включения данной опции в отчет. Поле может принимать одно из
следующих значений:
напряжений: закладка Значения, закладка Огибающая и закладка Общие экстр
Элемент / значение не будет включен в упрощенный отчет.
Элемент / значение не будет включен в упрощенный отчет при
полном выборе.
Элемент/значение н т с
пользовательским набором узлов, стержней, вариантов или режимов.
сли выбрана третья возможность, то станут доступны "радио" кнопки
е будет включен в упрощенный отче
ЭТАП 2
Е
,
расположенные справа от опций. Они могут подключать компоненты к упрощенному отчету.
Если элемент или значение вклю зователя, то
активизируются редактируемые поля
для оп иантов или режимов.
ом ном емом поле;
атием кнопки
чаются в упрощенный отчет с фильтром поль
соответствующие кнопки, и пользователю открываются
ределения списков узлов, стержней, вар
Существуют два пути фильтрации узлов, стержней, вариантов или режимов:
ввод еров узлов, стержней, вариантов или форм колебаний в редактиру
, что приводит к открытию диалогового окна Выбор. наж
ЭТАП
Если активна опция Сортировка, то все таблицы, досту ля упрощенной печати,
будут отсортированы по критерию, заданному пользователем. Существующая версия
предоставляет возможность сортировки только по назначенным группам узлов и стержней.
3
пные д
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 526 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
кнопка Пара
ых данных - Помощник - на экране будет
отобра о е то п зволяе
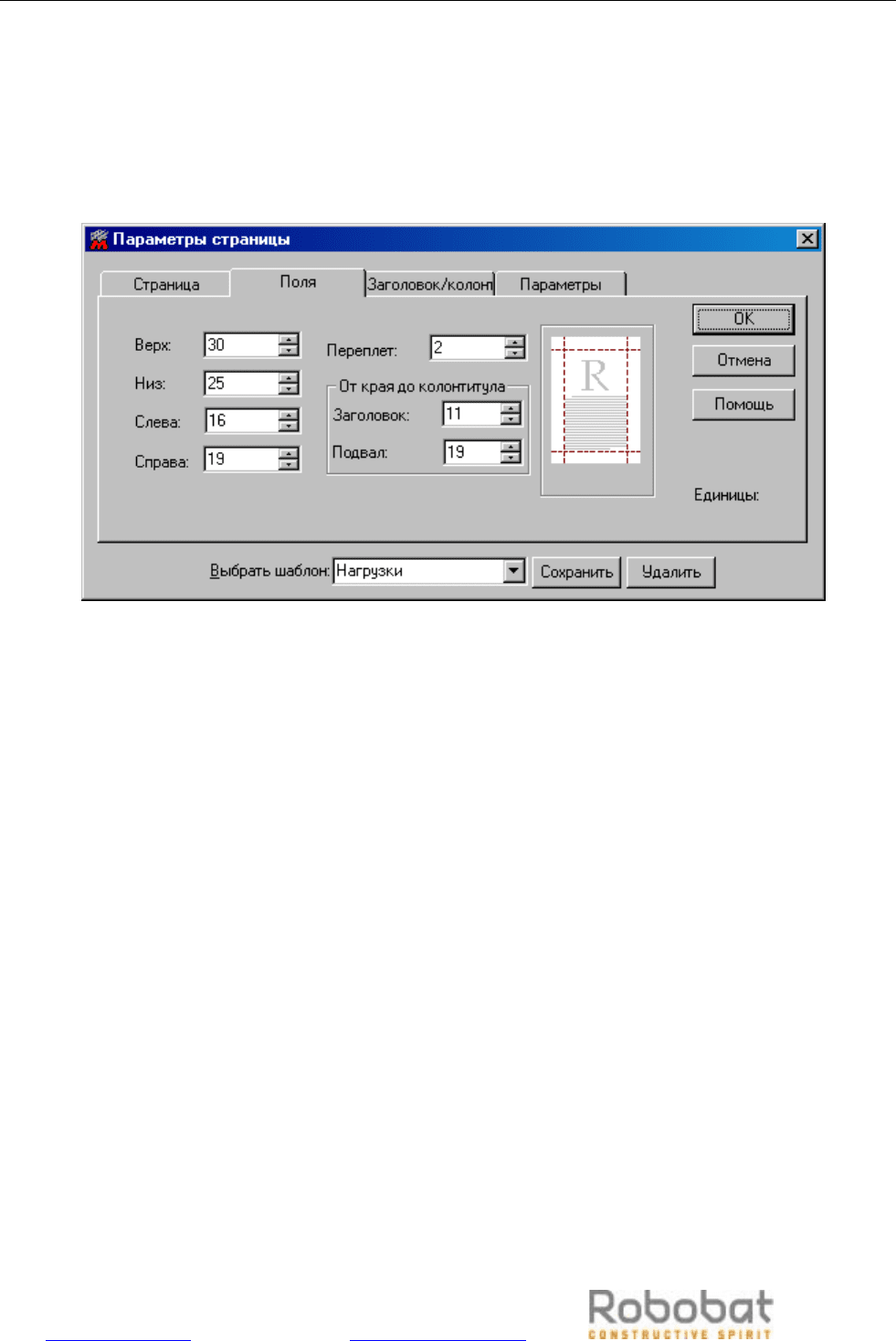
8.3 Параметры страницы
Когда выбрана команда Файл / Параметры страницы или нажата метры
страницы
в диалоговом окне Формирование выходн
жено диал говое окно, показанно ниже. Э о т назначить параметры для
установки страниц.
Внизу диалогового окна н исок
содержит
настро
контекстное меню в диалоговом
При нажатии на кнопку
Сохранить настройки страницы сохраняются в файле под
именем кнопку
Удалить удаляет текущий
шаблон из списка доступн
Диалоговое окно содержит четыре закладки: Страница, Поля, Заголовок/колонтитул и
Параметры:
Закладка Страницы - используется для назначения размера бумаги (A4, Письмо, и т.д.),
Внизу диалого
непеча ы
х), но использовать
при нумерации. Если опция включена, то заголовки элементов, исключенных из распечатки,
будут находиться в оглавлении. По умолчанию опция выключена.
- как в каждом текстовом редакторе, используется для определения полей:
верхнее поле, нижнее поле, левое, правое поле и т.д.
аходится опция Выбор шаблона. Выпадающий сп
шаблоны страниц созданные к настоящему времени. Выбор шаблона позволяет
файле. Созданные шаблоны включаются вить параметры страницы так, как в выбранном
окне
Формирование выходных данных.
, заданном в поле Выбор шаблона. Нажатие на
ых шаблонов.
ориентации (книжная, альбомная) и текущего номера страницы.
вого окна, на закладке Страница, находится опция Включить
таем е страницы в нумерацию и оглавление
. Опция используется, чтобы исключить
элемент из распечатки (диалоговое окно
Формирование выходных данны
Закладка Поля

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 527 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
оловки -
ловков и нижних
колонт ема
ROBOT Millennium имеет
станда
кнопки
е ,
ров, которые он назначил на закладке
помощ ть шаблон, где можно выбрать файл, содержащий назначенные
шаблон и нажатия кнопки
Сохранить.
Закладка Заг определяет, нужны ли титульные листы, заголовки, нижние
колонтитулы и оглавление. Здесь могут быть выбраны опции для заго
итулов: нет, рамка и разделительные линии. Сист
ртными заголовки и нижние колонтитулы, которые могут изменяться при нажатии
Редактирование.
Кроме кнопки
Редактирование имеются такж кнопки Восстановить находящиеся
около следующих опций: Титульный лист, Заголовок, Нижний колонтитул и Оглавление.
Нажатие этих кнопок приводит соответственно к восстановлению значений по умолчанию в
файле, содержащем титульный лист отчета, заголовок, нижний колонтитул и оглавление.
Кнопка
Восстановить, расположенная в поле Рамка, восстанавливает по умолчанию настройки
печати рамок.
Пользователь может сохранять значения парамет
Заголовок, чтобы использовать свои персональные установки заголовка. Это выполняется при
и опции Выбра
пользователем установки параметров, доступные на закладке Заголовок. Сохранение установок
выполняется
после записи имени в поле Выбрать
Можно удалить шаблон из списка, нажав кнопку
Удалить.
Закладка Параметры - содержит все переменные, определенные в системе с
присво
енными им именами.

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 528 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
ПРИЛОЖЕНИЯ
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 529 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
в :
ы – в
инерцию вращения, распределённая
нагруз
плотности распределения масс в данном элементе, в то время
как N( е
основы в
соответствии со следующей общей формулой (1.1):
ПРИЛОЖЕНИЕ 1
Преобразование нагрузок в массы
Вводные замечания:
Нагрузки, в преобладающем большинстве, обусловлены силой тяжести (массы). Поэтому
в динамических расчётах эти массы должны приниматься во внимание. Для того чтобы
пользователь мог легко преобразовывать статические нагрузки (нагрузки от собственного веса)
в массы, в анализаторе текстовых файлов была применена специальная команда “MASses
ACTive”.
Это даст возможность пользователям определять нагрузку только один
раз для целей
статического расчёта, а затем использовать нагрузки для создания распределения масс в
расчётной схеме при выполнении любых динамических расчётов.
Для успешного преобразования команде требуются два элемента. Первым из них
является набор направлений, по которым массы должны быть активными. Обычно
используются все глобальные направления (X, Y, Z), поскольку только в специальных расчётах
инерция действует не по всем из них. Второй - это величина инерции. Она определяется
номером варианта статической нагрузки и направлением нагрузок, которые должны быть
учтены при преобразовании. Кроме того, может быть задан дополнительный коэффициент –
множитель к величине нагрузки.
Характер нагрузки автоматически преобразовывается массы сосредоточенные силы
преобразуются в сосредоточенные массы, момент
в нка – епрерывные массы.
Синтаксис:
ANA [ DYN | MOD | TRAN | HAR | SEIsmic | SPEctral ].,(относится ко всем видам
динами когчес о расчёта)
CASe (#<number> <name>)
MASess ACTive [X/Y/Z]
[X|Y|Z IN ] (M us|PLus) <case_list> COEfficient=<c>
ПРИМЕЧАНИЕ. Вышеприведенный синтаксис был введён только в текстовый файл
(стирается из файла данных после его успешного сохранения в программе).
Общие принципы:
усть
ρ = ρ(x) – функция
П
x) – узловая матрица интерполяционной функции (матрица функции формы). В качеств
для дальнейшей обработки будет составлена согласованная матрица масс элемента
()()
[]
()
e
T
e
dxNActDirxxNM
e
Ω=
∫
Ω
ρ
(1.1)
де:
0
1,
00
когда i ое глобальное направление активно
δ
⎤
−
⎩
⎢⎥
⎣⎦
Флажк и глобально CTive [X/Y/Z],
т.е. любое направление активно, если ROBOT в
трактовке масс, где некоторыми компонентами сил инерции при вычислениях можно
г
1
0
δ
⎡
2
0,
00
i
когда i ое глобальное направление не активно
ActDir
δδ
−
⎧
⎢⎥
==
⎨
⎢⎥
,
3
и активност го направления устанавливаются MASess A
оно указано. Это – следствие общего стиля
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 530 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
пренеб
о
Каждая запись нагруз азовывается в массу отдельно и
независимо о
состав
П
к диагонализации, и/или частью инерции вращения можно будет
, ROT.
речь.
Матрица масс будет создана из всех нагрузок, принадлежащих ко всем случаям
нагрузки, указанным в <перечне_случаев>, действующим на текущий элемент/узел, в
соответствии с следующими правилами:
ки из указанного случая преобр
т других нагрузок и масс. Только простые случаи нагрузки (не комбинации !)
могут
появиться в перечне (но в одном динамическом случае перечень статических случаев
может быть представлен для преобразования в массы).
Общая матрица масс создаётся как сумма матриц масс всех вышеупомянутых
ляющих нагрузки и из предопределённой массы собственного веса конструкции и/или
масс указанных элементов. оэтому также часть матрицы масс, обусловленной нагрузками,
будет
представлена
пренебречь, если это указано в настройках CON|LUM
Значение функции плотности в данной точке создаётся как величина проекции текущего
вектора силы f на вектор
ν глобального направления, указанного в обязательном порядке и
однозначно
[]
[]
]
⎪
⎩
⎪
⎨
⎧
±
±
±
=→
Z
Y
X
1,0,
0,1,0
0,0,1
)|]{||[
if
if
if
vPLusMOinsZYX
T
[
0
(
) ()
xfvx
T
⋅=
ρ
€
(1.2)
Только положительные значения принимаются в расчёт в каждой точке интегрирования,
поэтому
() ()
()
cxx *
€
,0max
ρρ
= (1.3)
ПРИМЕЧАНИЕ. Правила, изложенные выше, направлены на то, чтобы обеспечить
лёгкий отбор нагрузок, обусловленных гравитацией. Поскольку не существует ничего, что
может быть принято за направление гравитации по умолчанию, правило знаков должно быть
установлено Пользователем.
Все направления, используемые для определения преобразования нагрузки в массу,
должны быть приемлемыми для текущего общего типа конструкции, поэтому PLAte
принимает
только направление Z, для других плоских задач будут приняты только X и Y. Несовместимые
задания направления будут проигнорированы или будут сочтены ошибочными. Трёхмерные
типы конструкций принимают все глобальные направления.
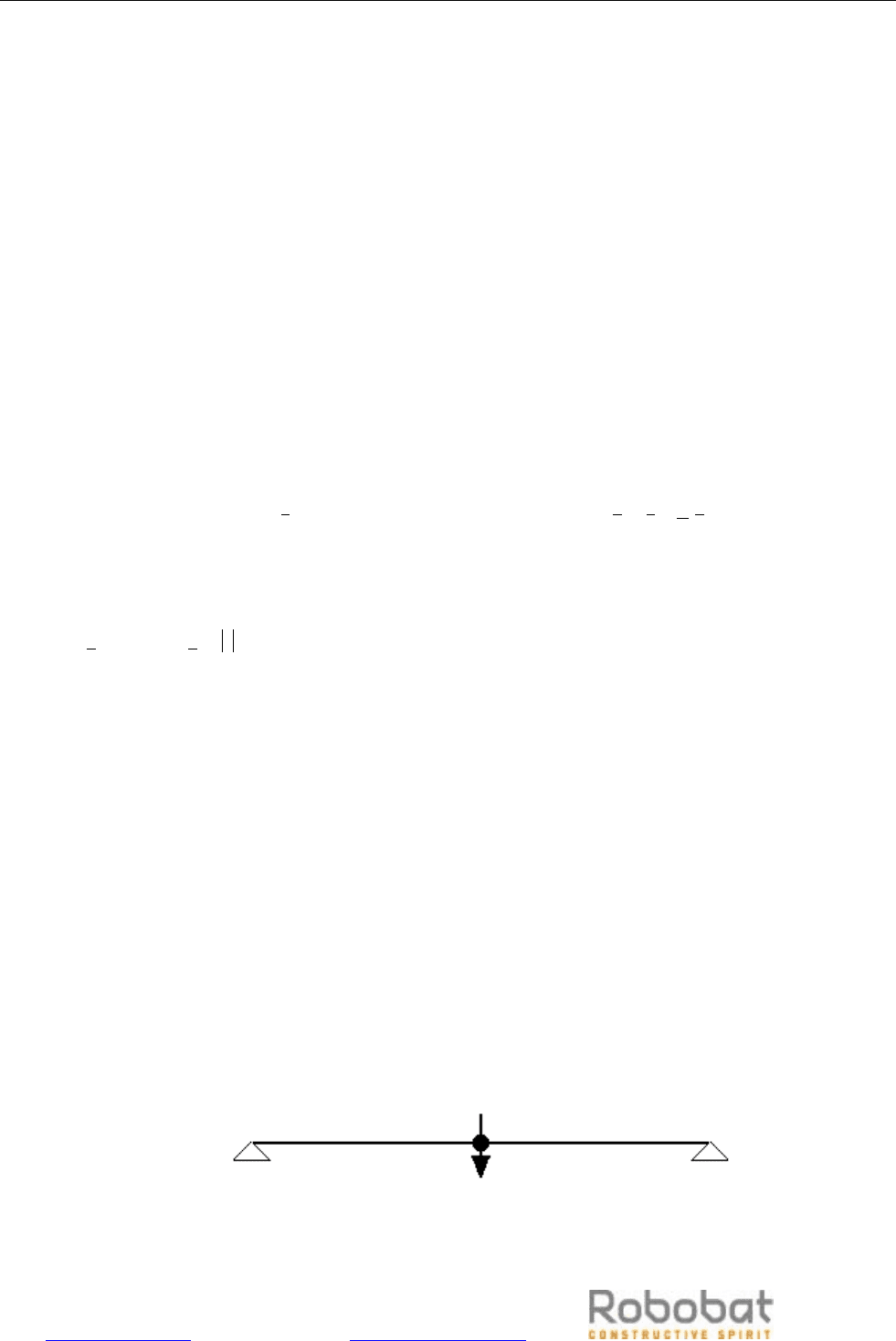
Пример:
Рассмотрим балку, нагруженную по центру нагрузкой от собственного веса Fy= -120 кН.
Пусть случай нагрузки, показанный ниже, имеет номер 3. Чтобы рассчитать формы свободных
колебаний
этой конструкции в случае номер 10, принимая во внимание, что эта масса (Fx=Fy=
12 232 кг), нужно использовать следующие команды:
ANA MOD=3 MAS=CON
CAS #10 modal
MASses ACTive X Y
Y MINus 3