Robot Millennium (Версия 20.0). Руководство пользователя
Подождите немного. Документ загружается.

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 531 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
чных типов наПодробности преобразования для разли грузки
Нагрузки, ствующие на элементы балки
Равномерн нагрузка на элемент
[Px=<px.>/Py=<py>/Pz=<pz>] (LOCal/GLObal) (PROjected) ([R=<r>])([R=<r>])
Вектор плотности нагрузки преобразован к глобальным направлениям, как указано
ками:
для обр
дей
ая
настрой
(LOCal/GLObal) (PROjected) ([R=<r>]), принимая во внимание флажок (PROjected) как
аботки нагрузки, распределение равномерной нагрузки установлено в соответствии с
(1.2) (1
аписи (составляющей) нагрузки отдельно (не для общей нагрузки,
являющ
.3) нагрузка от собственного веса
Нагрузка от собственного веса преобразуется в массу эквивалентно равномерной
нагрузке на элемент.
ПРИМЕЧАНИЕ. Эту операцию следует применять с осторожностью, так как масса,
обусловленная нагрузкой конструкции от собственного веса, принимается в динамических
расчётах автоматически (если только плотность материала больше 0)
Переменная нагрузка на элемент
< C b L(X=<x1>)[ P=<p1>] ((JUSque)(X =<x2>)[P=<p2>] ) (R= r>) (LO al/GLO al) (RE ative)
(PROjected)
нагрузка преобразуется к глобальным направлениям, как указано в установках:
(LOCal/GLObal) (PROjected) ([R=<r>])
равномерное распределение масс устанавливается согласно (1.2) (1.3)
ПРИМЕЧАНИЕ. Правило (3) подразумевает следующую трактовку знакопеременной
нагрузки: для каждой з
ейся суммой всех нагрузок, действующих на данный элемент), как показано на Рис.1.1.
Рис.1.1
сосредоточенная сила, действующая на элемент
[X=<x>] [F=<f>](R=<r>) (Local)(RELative)
Общая масса m, сосредоточенная в точке x
0
, рассчитывается из глобального
представления вектора силы f следующим образом:
m = max( 0,
ν
T
f ) * | c | (1.4)
Затем рассчитывается согласованная матрица масс, как если бы распределение масс
было п
ы
редставлено дельта-функцией Дирака, что ведёт к:
M
e
= N
T
(x
0
) m [ ActDir ] N(x
0
) (1.5)
сосредоточенный момент элемента
[X=<x>] [F=<fc>] (R=<r>) (LOCal)(RELative)
Поскольку задание направления массы не касается направлений инерции вращения,
постольку должно быть выработано отдельное правило для выполнения преобразования между
сосредоточенным моментом элемента и инерцией вращения определённого тела,
присоединённого к элементу.
Преобразование <fc> векторного типа выполняется в соответствии с установками
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 532 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
ы необходимости то ес
нагру
граничение
модели
(R=<r>) (LOCal) для получения вектора I, вычисленного в местной системе координат элемента.
Для того, чтоб избежать век рного преобразования н овместимого типа
(когда должно использоваться тензорное), зка должна быть задана как LOCal, но не как
R=<r>,, иначе будет выдано предупреждение.
Предполагается, что оси локальной системы координат элемента совпадают с главными
осями инерции тела, поэтому
I
T
= [ I
XLoc
, I
YLoc
, I
ZLoc
] представляют главные моменты инерции в
локальной системе координат элемента. Отсюда вытекает следующее о
рования:
.2
Неправильное местоположение,
моделирование невозможно
Рис.1
определении <m> является вектором, который, после векторного преобразования
к локальной системе координат элемента, представляет удельные (по длине элемента)
плотности инерции вращения, отнесённые к местной системе координат элемента.
Всё, что касается сосредоточенного момента элемента (Смотри Рис. 1.2), остаётся в силе
.
Нагрузки, действующие на поверхностные элементы
равномерная нагрузка на элемент
[Px=<px.>/Py=<py>/Pz=<pz>]
Вектор плотности нагрузки рассчитывается, а затем преобразуется в плотность массы в
соответствии с (1.2)(1.3)
нагрузка от собственного веса
Нагрузка от собственного веса преобразуется в эквивалентную равномерную нагрузку и
трактуется далее, как указано выше.
ПРИМЕЧАНИЕ. Эту операцию следует применять с осторожностью, так как масса,
обусловленная нагрузкой конструкции от собственного веса, принимается в динамических
расчёт
еременная нагрузка
Правильное местоположение
распределённый момент элемента
[M=<m>] (LOCal)
В этом
ах автоматически (если только плотность материала больше 0)
п на элемент

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 533 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
p3> AU<n3>))
нагрузки вычисляется в каждой точке интегрирования, а затем преобразуется
в плотность масс в соответствии с (1.2)(1.3), см ые правила
интегрирования применяются с
Q8,
T6,
= 2x2 для Q4
для T3
еременная нагрузка внутри контура
Ojected DIRection <v> _
CONtour <l_node>
ляется в каждой точке интегрирования, а затем преобразуется
в плот
отри Рис.(1.1). В случае, если не вся площадь
элемента элемента производится полностью
автоматизированное интегрирование по сетке размером до 100x1 достичь
требуемой точности интегрирования. Поэтому использование эт ет иногда
замедлять процесс вычисления матрицы масс.
а в массу элемента,
распре
т
ко ил
при необходимости, в глобальной системе координат, а затем
обраба вычисления значения массы, присоединённой к
точке
[P=<p1>] AU <n1>( [P=<p2>AU<n2> ([P=<
Плотность
отри Рис. (1.1). Расширенн
NGAUS = 3x3 для
7 для =
= 3
п
[P=<p1>] AU <n1>( [P=<p2>AU<n2> ([P=<p3> AU<n3>)) PR
Плотность нагрузки вычис
ность масс в соответствии
с (1.2)(1.3), см
принадлежит контуру, в пределах
00, с тем, чтобы
ой опции мож
переменная нагрузка вдоль линии
LIN
<n1>[P=<p1>] Jusque <n2> (P=<p2>) ( [LOCal (GAMma=<gamma>)] )
Только поступательная сила может быть
преобразован
делённую вдоль линии.
Правило Гаусса интегрирования по трём точкам применяется на каждом сегменте линии,
пересекающей элемент. В каждой очке интегрирования вектор плотности нагрузки
трансформируется в глобальной системе координат, а затем обрабатывается в соответствии с
(1.2)(1.3) для вычисления распределения масс вдоль линии.
сосредоточенная нагрузка на вспомогательную точку
NODe (auxiliary)
F=<f> ( [R=<r>] )
Толь поступательная с а может быть преобразована в массу элемента (для элементов
балки преобразование момент – инерция вращения было разрешено, а здесь не допускается).
Вектор силы <f> преобразуется,
тывается в соответствии с (1.2),(1.3) для
в пределах элемента, после чего рассчитывается
матрица масс с использованием (1.5).
Элемент, к которому будет присоединена масса, отыскивается автоматически.
Узловые нагрузки
сосредоточенная сила
NODe
F=<f> ( [R=<r>] )
Вектор силы <f> обрабатывается согласно (1.2), (1.3) для вычисления величины узловой
массы.
сосредоточенный момент
NODe
F=<c> ( [R=<r>] )
Так как задание направления массы не касается направлений инерции вращения, то
должно быть установлено отдельное правило для выполнения преобразования между узловым
моментом и инерцией вращения определённого тела, присоединённого к узлу.
Преобразование стиля вектора <fc> производится в соответствии
с установкой (R=<r>)
для получения вектора
I , относящегося к глобальной системе координат. Для того, чтобы

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 534 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
избежа жен быть
использован тензорный), никаких LOCal не следует задавать, равно как и никаких R=<r>, в
противном случае поя
редполагается, что глобальные оси координаты совпадают с главными осями инерции
тела,
ть необходимости преобразования несовместимого стиля вектора (когда дол
вится предупреждение.
П
таким образом,
[]
ZLocYLocXLoc
T
IIII ,,= представляют г авные моменты инерции в
глобальных координатах.
МЕЧАНИЕ. Это правило отлично от тех, которые используются в случае
сосредоточенных масс, присоединённых к
л
ПРИ
элементу балки.

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 535 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
ля элементов стержней
(балок) приняты следующие допущения:
случаев (2D и 3D рамы,
перекрытия)
днородный элемент, учитывающий физическую и/или геометрическую нелинейность
в 2-х
Разрешается ис
- включать деформацию сдвига (модель Тимошенко)
- переменные по
- основание Винклера
пны
Модифицированное Описание Лагранжа)
ехода, результаты идентичны тем, что получаются для стандартных
линейных элементов
и
Состояния сдвига и кручения рассматриваются как линейно-упругие и не должны быть
связаны
с осевыми усилиями и изгибающими моментами на уровне поперечного сечения
линейные разъ
или физической нелинейностью, игнорируются)
оме упруго-пластического элеме
шарниры в выбранных поперечных сечениях стержня как расширение опции “нелинейные
ПРИЛОЖЕНИЕ 2
Новые Стержневые Элементы (Нелинейные Расчёты в программе
ROBOT)
Принятые обозначения:
E – модуль Юнга
G – модуль упругости при сдвиге
ν - отношение Пуассона
fd – предел упругости
Ax – площадь поперечного сечения
Ix – константа кручения
Iy – момент инерции – изгиб в плоскости XZ
Iz - момент инерции – изгиб в плоскости YZ
ky, kz – поправочные коэффициенты для жёсткости при сдвиге в направлениях Y и Z
L – длина стержня.
1. Предварительные замечания и допущения
Д
Единообразная формулировка для двумерных и трёхмерных
О
Стандартное число степеней свободы для перемещений крайних узлах
T
zyxzyx
uuu ],,,,,[},{
φφφ
== φud
пользовать следующее:
перечные сечения – только для геометрической нелинейности.
Досту 2 уровня геометрической нелинейности:
Нелинейность (Теория второго порядка)
Пи-ДЕЛЬТА наиболее точная теория из возможных - большие перемещения и вращения
(постепенный с модификацией геометрии -
В предположении малых перемещений
и отсутствия физической нелинейности, для
случая предельного пер
При расчёте физической нелинейности применяются слоистая модель принцип
составного напряжённого состояния для одноосного напряжённого состояния на уровне точки
(слоя)
Не ёмы и шарниры могут быть определены только как элементы DSC
Допускаются все виды нагрузок на элементы (как для стандартных элементов). Однако,
предполагается, что узловые усилия, действующие на конструкцию, определяются в начале
процесса (например, изменения в передаче нагрузок от элементов на узлы
, обусловленные
геометрической
Кр нта, можно также генерировать упруго-пластические
шарниры” (см. пункт 5)
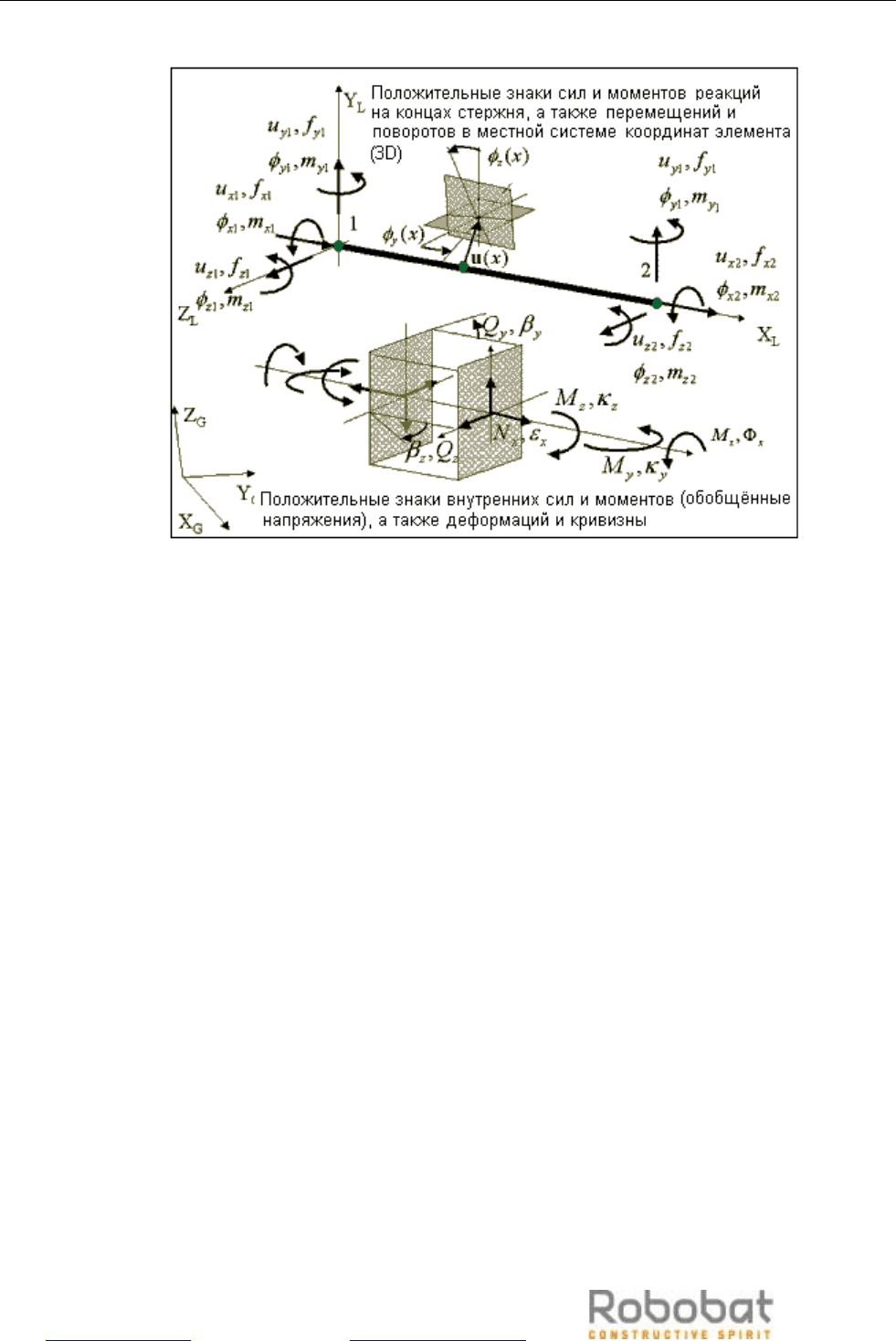
2. Аппроксимация геометрии, кинематики и напряжённого состояния
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 536 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
Геометрия, правило знаков для усилий, перемещений, напряжений и деформаций
Осно ны
В локально
деформации
в е кинематические соотношения
й системе координат элемента, в геометрически линейном диапазоне,
обобщённые
E на уровне поперечного сечения следующие (символ означает
вычис ренциала вдоль направления оси стержня):
ox
},,,,{
ϕββκκε
=Ε
де:
я:
x
),(•
ление диффе
T
y
,
zyz
г
Продольная деформация по оси
стержн
x
ox
u,
=
ε
Кривизна:
yy
,
z
z
φκ
φ
κ
−=
=
еформация):
Средние углы (д
x
z
xy
w
β
v
β
=
=
,
,
Единичный угол закручивания:
xx
,
φ
ϕ
=
Апп а емещения
Д ности рассмотрения влияния сдвига и согласования результатов, полученных
для ейного элемента, введены так называемые функции физической формы, учитывающие
влия
ие стержни:
роксим
ля возмож
лин
ние сдвига.
Плоск
ция пер
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 537 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
⎥
⎦
⎢
⎢
⎣
1097
7
43
3
0
0
00
hh
h
Функции формы и их производные выражаютс ими формулами:
⎢
⎢
⎢
⎢
⎢
⎢
⎡
=
1
1
0
0
0
h
h
h
h
N
⎥
⎥
⎥
⎥
⎥
⎥
8
1098
3
65
0
0
000
0
hh
hhh
h
hh
⎥
⎤
654
2
0
00
h
hhh
h
=
,)(
x Nuu
я следующ
]3)1(2[
)21(
1
])1([
)21(
10
]662[
)21(
1
]232[
)21(
1
9
]3)2(2)1([
)21(
1
])2()1([
)21(
8
]662[
)21(
1
)]21[(
)21(
1
7
]6)1(2[
)21
(
1
]3)1(2[
)21(
1
6
]126[
)21(
1
]66[
)21(
1
5
]6)2(2[
)21(
1
]3)2(2)21[(
21
1
4
]126[
)21(
1
]66[
)21(
1
3
/12
/111
,
232
232
232
2
2
2
2
2
2
2
ξξκκ
κ
ξξκκξ
κ
ξξκ
κ
ξξκξ
κ
ξξκκ
κ
ξξκξκ
κ
ξξκ
κ
κ
κ
ξκ
κ
ξξκ
κ
ξ
κ
ξξ
κ
ξκ
κ
ξξκκ
κ
ξ
κ
ξξ
κ
ξ
ξ
−−+
+
−−+
+
−+
+
−+
+
−+++−
+
−+++−
+
+−−
+
+
+
+−−
+
+−−
+
+−
+
+−
+
++−
+
++−+
+
−
+
−
+
−−
L
L
L
L
L
LL
L
LL
L
L
hhi
xii
где:
L
x
=
ξ
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
22
6
,
6
GALk
EI
GALk
EI
z
y
y
z
κ
для плоскостей XY и XZ соответственно.
Кинематические соотношения для матричного представления (геометрически-линейная
теория)
Вообще, при рассмотрении влияния наложенных деформаций
Инкремент обобщённых (местных) деформаций:
,
T - матрица преобразования (глобальные → местные)
2D:
},,{
T
z
T
y
T
o
o
∆∆∆
=
κκε
E
o
LocL
ΕuBE ∆∆∆ −=
GloLoc
uTu ∆=∆

ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 538 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
⎡
⋅
⎥
⎢
⎢
⎣
⎡
−−
−−−−=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=
2
1
8473
43
21
,,0
,,0,,0
,00,
u
ε
xx
xx
xx
y
z
ox
hhhh
hhhh
hh
β
κ
ε
⎥
⎦
⎤
⎥
⎢
=
2
21
00,0000
00000,0000
x
xx
h
h
β
⎤
00
⎥
⎦
⎤
⎢
⎣
⎥
⎦
−−
10695
65
,,0
u
xx
xx
hhhh
3D:
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⎥
⎥
⎥
⎥
⎥
⎢
⎢
⎢
⎢
⎢
⎢
⎣
−−++
−−−−
−−−−
2
1
1
106958473
106958473
6543
6543
0,000
0,0,000,0,00
,000,0,000,0
,000,0,000,0
0,0,000,0,00
u
u
x
xxxx
xxxx
xxxx
xxxx
h
hhhhhhhh
hhhhhhhh
hhhh
hhhh
⎡
=
⎥
⎥
⎢
⎢
E
y
z
β
⎥
⎦
⎢
⎣
0,
z
h
φ
⎥
⎢
y
⎥
⎢
ox
κ
⎤
⎡
ε
κ
T
,,
21
φφφφφφ
заданных обобщённых напряжениях (деформации)
где:
⎧
==
T
zyxzyx
uuuuD },,,,,{:2
},{
222111
φφ
uuu
⎩
zyxzyxzyxzyx
uuuuuuD },,,,,,,,,{:3
222222111111
Деформации в окрестностях точки (слоя)
⎨
При
{
}
zyox
κ
κ
ε
,,
поперечного
сечения, напряжение
xl
ε
или его инкремент
xl
ε
∆
в любой точке поперечного сечения “l” – с
координатами yl, zl, рассчитывается как
lzlyoxxl
yz
κ
κ
ε
ε
++=
окончательно, инкремент напряжения в слое:
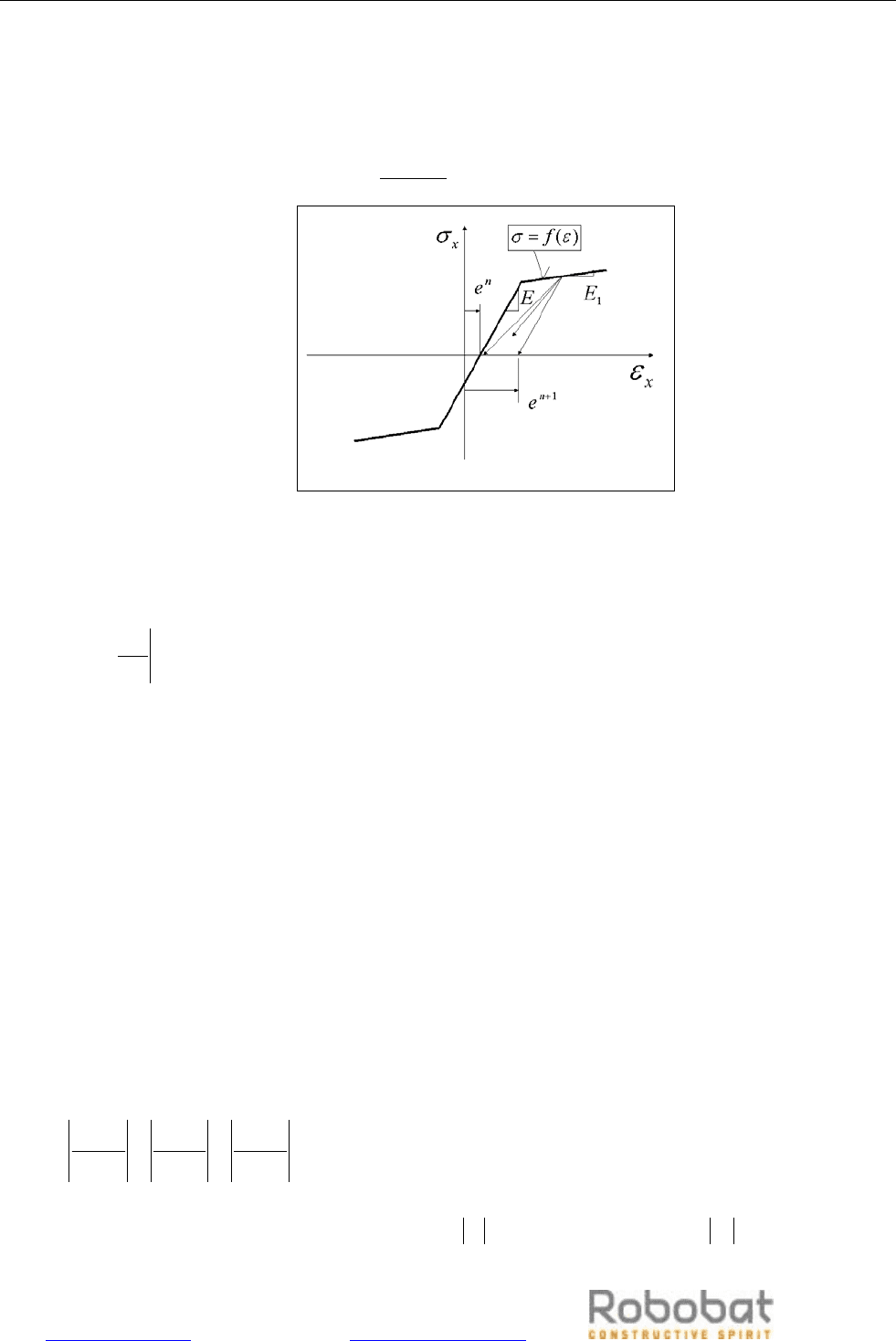
3. Напряжения и внутренние усилия в пределах элемента
Конститутивный принцип на уровне точки
Он принят в общей инкрементальной форме, где текущие напряжения
определены
как функция напряжения для последнего состояния равновесия
и текущего значения
инкремента напряжения с учётом наложенных (термических) напряжений,
основанных на функции σ = f(ε), которая описывает отношение в процессе активного
нагружения, и на спецификации принципа разгрузки и повторной нагрузки. В частности, это
может быть упругопластический принцип с линейным упрочнением и указанным принципом
T
ll
T
lxl
yz },,1{; == vEv
ε
)()(
oT
l
oT
lxl
EuBvEEv ∆−∆=∆−∆=∆
ε
1+n
x
σ
n
x
σ
),(
11
xl
n
xl
n
xl
F
εσσ
∆=
++
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 539 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
разгрузки, то пластичный, (в) повреждение, (г) смешанный. Для упругой
разгру пассивный и активный процессы проходят по одному и тому же пути σ = f(ε). Для
осталь оль прямой линии, определяемой начальной точкой
данног процесса разгрузки
есть (a) упругий (б)
зки
ных случаев он выполняется вд
о },{
UNLUNL
σ
ε
и модулем разгрузки , определяемым как
UNL
D
n
DUNLPUNLMUNL
nn
DUNLP
aDDaDd
e
DcEDb
____
)1(:)(;:)(;:) +−=
UNL _
(
−
==
ε
σ
.
n
e является деформацией (напряжением), хранимым в памяти, для которого начался
текущ актиий вный процесс, отсчитываемый после превышения значения 0 напряжениями с
принятым разгружением (
0
1
=e ).
Для расчёта требуется предоставить текущую жёсткость, которая подразумевается как
производная
ε
D
σ
∂
∂
=
x
(результирующие
напряжений)
D :)
Вычисление значений усилий и жёсткости поперечного сечения
уНа ровне поперечного сечения вектор внутренних усилий
состоит из:
T
QMND },,{:)2( =
Σ
T
xzyzyx
MQQMMN },,,,,{3( =Σ
yzx
Состояния сдвига и кручения
ST
Σ
рассматриваются как линейно-упругие и не
сопряжённые с состоянием аксиальных / изгибающих силий на уровне поперечного сечения.
+
n
1
у
x
Состоя
ϕ
∆⋅+
x
n
x
GIMM
β
β
=
∆⋅+=
∆⋅+
+
+
n
zz
n
z
n
z
yy
n
yy
GAkQQ
GAkQQ
1
1
=
ния сжатия/растяжения
NM
Σ
обычно рассматриваются как сопряжённые, когда
применяется послойный подход. Однако, до тех пор, пока упругое состояние гарантируется, т.е.
пока текущие обобщённые напряжения подчиняются следующему условию упругого
состояния:
1≤++
ELA
Z
Z
EL
Y
Y
κ
κ
κ
κ
ε
,
A
ELA
ox
ox
ε
е: гд
))/((min));/((min);/(min
ldl
l
ELA
Zlldl
l
ELA
Yldl
l
ELA
ox
yEfzEfEf ===
κκε
,
l
поперечное сечение рассматривается как упругое, и послойный подход не задействован.
ROBOT MILLENNIUM v 20.0 РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ Март 2007 - 540 -
WEB: www.ar-cadia.com.ua Эл.почта: office@robobat.odessa.net
n
z
n
EIM
κ
∆+=
=
+
+
1
1
к то л ,
ляются отдель основе
l
1
тояния как:
где:
⎡
=
l
llll
lll
ll
l
NM
yzy
zyz
yz
1
2
2
1
1
андартным формулам с применением вадратуры Гаусса
(Ngaus
TT
==
Te
dx
0
DBB
zz
n
z
yy
n
y
n
y
o
n
xx
M
EIMM
EANN
κ
ε
⋅
∆⋅+=
∆⋅+
+
1
Ка лько установ ено нарушение условия упругого состояния, напряжения вызванные
осевыми деформациями и изгибом, вычис но для каждого слоя, и на их
рассчитываются характеристики сечения
∑
∑
∑
=
=
++
=
++
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=Σ⇒
=
=
Nlayer
l
lll
z
yNM
Nlayer
l
ll
n
xl
n
z
Nlayer
l
ll
n
xl
n
y
A
M
M
N
yAM
zAM
1
1
11
1
11
σ
σ
σ
v
Жёсткость на уровне поперечного сечения
D рассчитывается следующим образом:
в упругом состоянии как:
D = diag {EA, EIy, EIz, KyGA, kzGA, GIx)
После превышения условия упругого сос
∑
++
=
Nlayer
l
n
xl
n
x
AN
11
σ
=
⎥
⎦
⎤
⎢
⎣
⎡
=
ST
NM
D
D
D
0
0
∑∑
⎢
=⋅
Nlayer
lll
Nlayer
T
llll
zADAD
vvD
==
⎥
⎥
⎦
⎤
⎢
⎣
y
},,{
xzy
Вектор усилий в узлах и матрица жёсткости элемента
Они рассчитываются по ст к
ST
GIGAkGAkdiag=D
s=3).
∑
∫
=
==
iG
iGiGiGiG
L
dJWxdx
1
0
)( ΣBΣBf
∑
=
NGAUSS
iG
iGiGiGiGiG
T
L
dJWxx
1
)()( BDBK
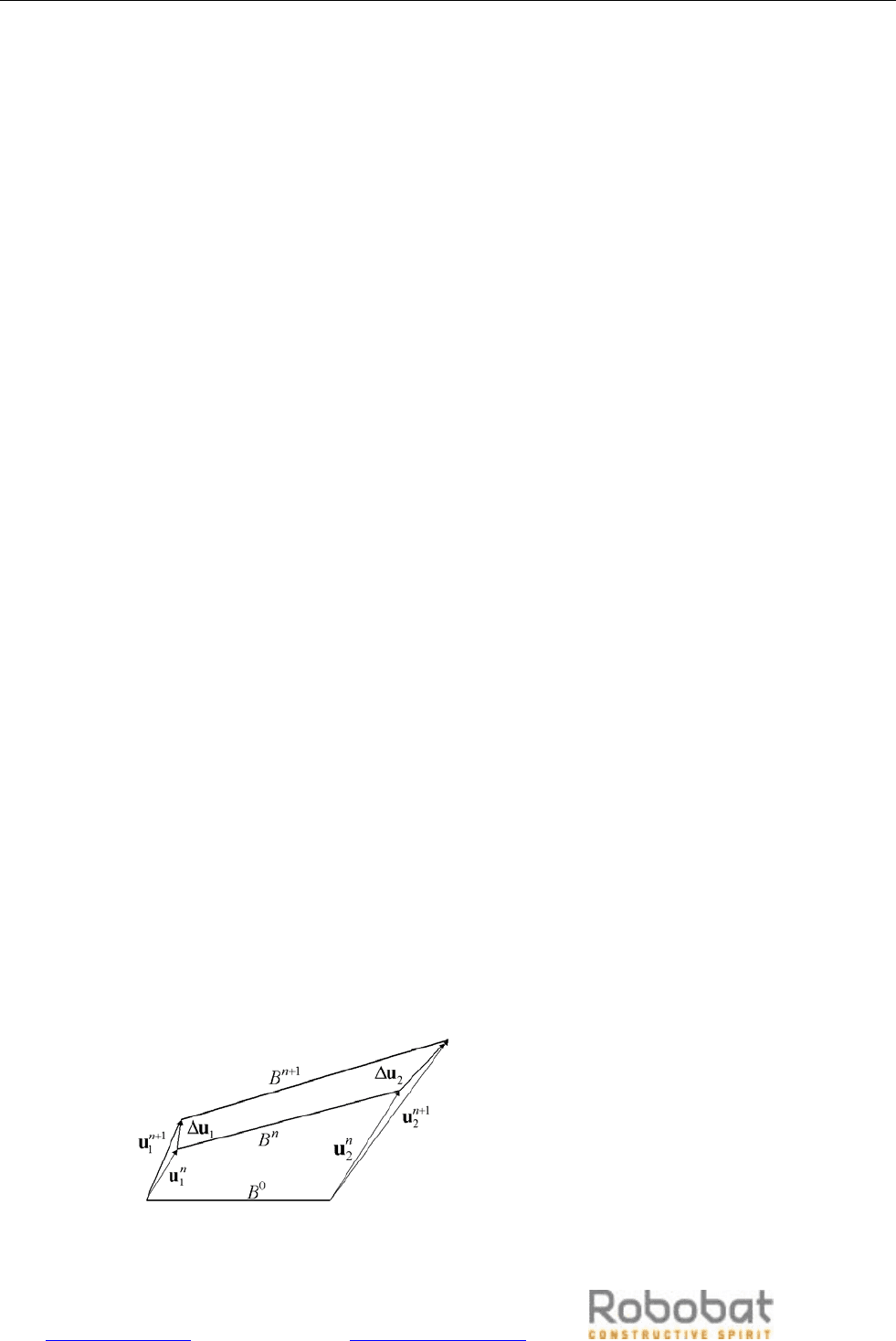
4. Геометрическая нелинейность
читываются следующие конфигурации:
NGAUSS
∫
У
0
B
-
n
начальная конфигурация
B
- конфигурация ссылки
(последняя, для которой выполняются
условия равновесия)
1+n
B
- текущая конфигурация
(итерированная)