Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Product Automation 32.10 Embedded Systems 555
•
Real-time, deterministic response
•
Power consumption
•
Lifetime
Automated products as well as automation and power
systems must have very high availability and be ex-
tremely reliable. Economic security and personal safety
depend on high-integrity systems. Embedded systems
play a critical role in such mission-critical configura-
tions.
Real time is a term often associated with embed-
ded systems. Because these systems are used to control
or monitor real-time processes, they must be able to
perform certain tasks reliably within a given time. The
response time associated with this real time varies with
the applicationand canrange from seconds to microsec-
onds. Embedded systems must operate with as little
power consumption as possible. For this reason various
power-harvesting technologies are often included in the
design.
Yet another requirement that is frequently imposed
on industrial embedded systems is a long lifetime of the
product itself and the lifecycle of the product family.
While modern consumer electronics may be expected
to last for less than 5 years, most industrial devices
are expected to work in the field for 20 years or more.
This imposes challenges not only on the robustness of
the electronics, but also on how the product should
be handled throughout its lifecycle: Hardware compo-
nents, operating systems, and development tools are
constantly evolving and individual products eventually
become obsolete.
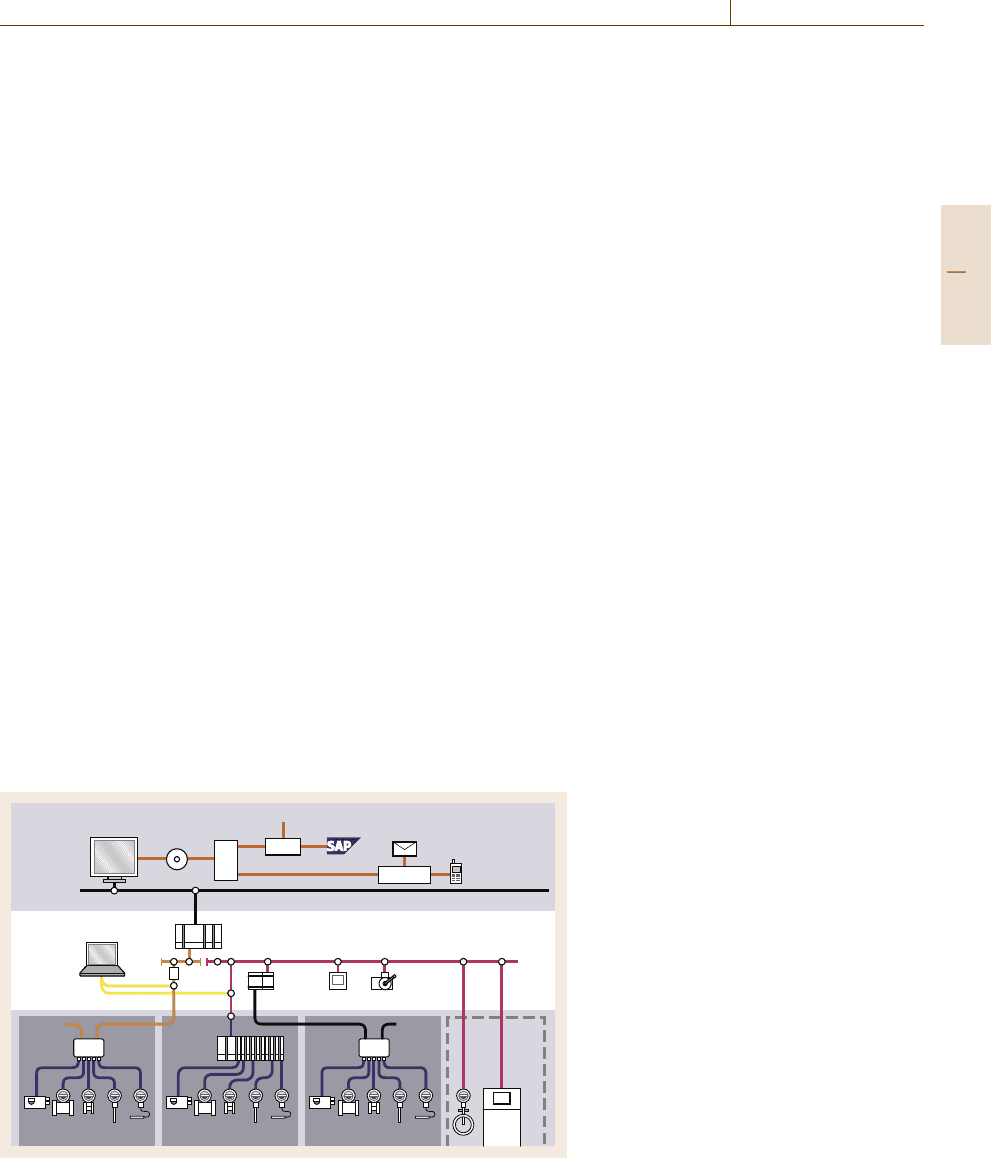
Asset
condition
document
°C kPa Ω l/min ppb % °C kPa Ω l/min ppb %°C kPa Ω l/min ppb %
Asset
manager
Automation
system
PC tool
CMMS
Messenger
Drives,
switchgear
etc.
Fig. 32.12 Automated products like
instruments as part of a control
network (after [32.23])
The key issues in developing embedded systems
are complexity, connectivity, and usability. While the
steadily increasing transistor density and speeds of in-
tegrated circuits offer tremendous opportunities, these
improvements also present huge challenges to handle
the complexity: a modern embedded system can consist
of hundreds of thousands of lines of software code.
Before the widespread deployment of digital com-
munication, most embedded systems operated in
a stand-alone mode (Fig.32.12). They may have had
some capabilities for remote supervision and control,
but, by and large, most functions were performed
autonomously. This is changing rapidly. Embedded sys-
tems are now often part of sophisticated distributed
networks. Simple sensors with basic transmitter elec-
tronics have been replaced by complex, intelligent field
devices. As a consequence, individual products can no
longer be automated in isolation; they must have com-
mon components. Communication has gone from being
a small part of a system to being a significant function.
Where serial peer-to-peer communication was once the
only way to connect a device to a control system,
fieldbuses are now able to integrate large numbers of
complex devices. The need to connect different appli-
cations within a system to information and services in
field devices drives the introduction of standard infor-
mation and communication technologies (ICT)suchas
Ethernet and web services.
Complex field devices are often programmable or
configurable. Today’s pressure transmitters can contain
several hundred parameters. The interaction with a de-
vice – either from a built-in panel or from a software
Part D 32.10
556 Part D Automation Design: Theory and Methods for Integration
application in the system – has become more complex.
The task ofhiding this complexityfrom theuser through
the creation of a user-friendly device has sometimes
been underestimated. Most other requirements are eas-
ily quantifiable or absolute, but usability is somewhat
harder to define.
The emergence of system-on-chip (SoC) technology
has enabled extremely powerful systems to run on con-
figurable platforms that contain all the building blocks
of an embedded system: microprocessors, digital signal
processors (DSP), programmable hardware logic, mem-
ory, communication processors, and display drivers, to
give but a few examples. A further important aspect of
the evolution of embedded systems is the trend towards
networking of embedded nodes using specialized net-
work technologies, frequently referred to as networked
embedded systems (NES).
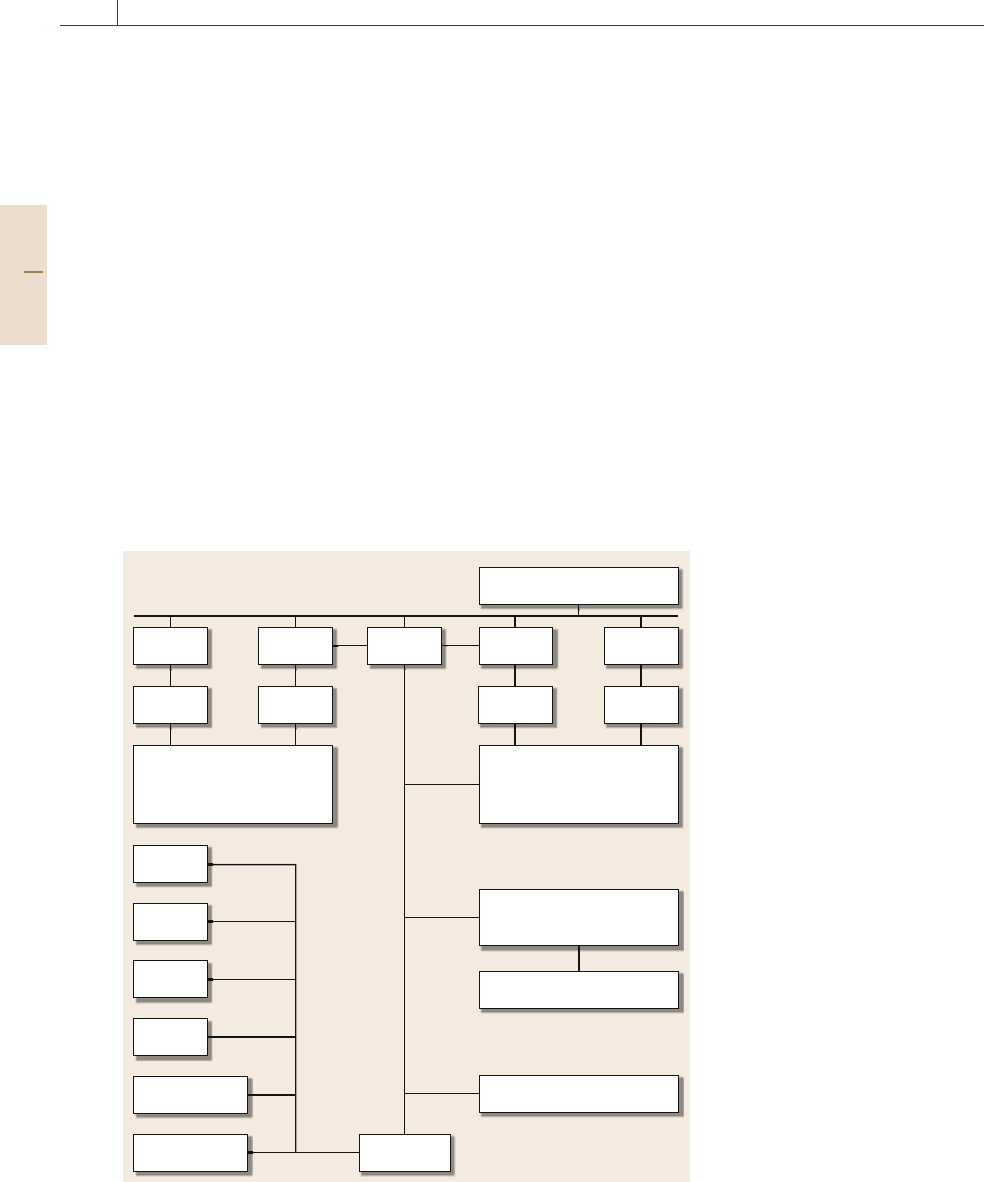
SoC can be defined as a complex integrated cir-
cuit, or integrated chipset, that combines the main
functional elements or subsystems of a complete end
product in a single entity (Fig. 32.13). Nowadays, the
External memory access
RAM FlashFlash RAM
DCache
System
bus
ICacheICache
PLL
Test
PCl
USB
Disk controller
Audio CODEC
Video I/F
MPEG decode
DCache
Peripheral bus
Microprocessor DSP
DMA
Bus bridge100 base-T
Fig. 32.13 Typical SoC system for
consumer applications (after [32.24]).
USB – universal serial bus, PLL –
phase locked loop, PCI – peripheri-
cal component interconnect, DMA –
direct memory access, I/F – interface
most challenging SoC designs include at least one pro-
grammable processor, and very often a combination
of at least one RISC (reduced instruction set comput-
ing) control processor and one DSP. They also include
on-chip communications structures – processor bus(es),
peripheral bus(es), and sometimes a high-speed sys-
tem bus. A hierarchy of on-chip memory units, as well
as links to off-chip memory, is especially important
for SoC processors. For most signal-processing appli-
cations, some degree of hardware-based accelerating
functional unit is provided, offering higher perfor-
mance and lower energy consumption. For interfacing
to the external world, SoC design includes a number
of peripheral processing blocks consisting of analogue
components as well as digital interfaces (for example,
to system buses at board or backplane level). Future
SoC may incorporate MEMS-based (microelectrome-
chanical system) sensors and actuators or chemical
processing (lab-on-a-chip).
Recently, the scope of SoC has broadened. From
implementations using custom integrated circuits (ICs),
Part D 32.10
Product Automation 32.11 Summary and Emerging Trends 557
b
h
f
d
c
e
g
i
a
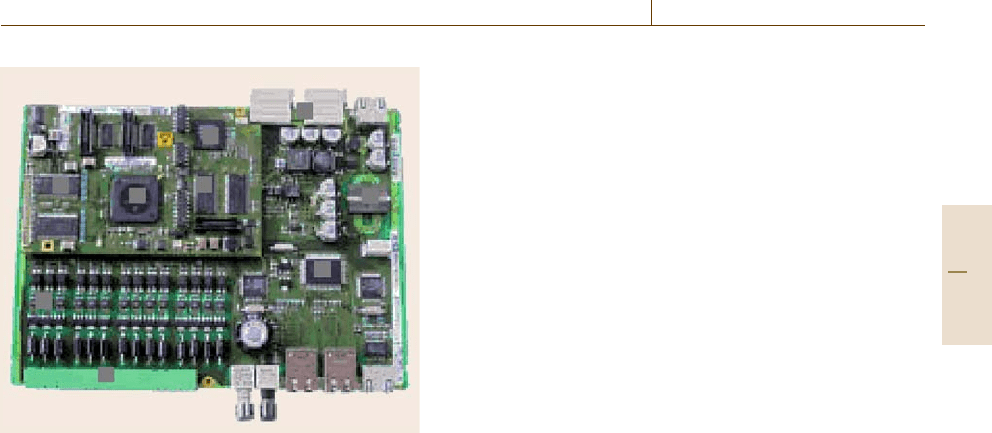
Fig. 32.14 Fully fledged board for the automation of
a substation in an electric grid: (a) EPROM, (b) signal
preprocessing FPGA, (c) device internal 100bit/sserial
communication, (d) power supply, (e) multiport Ethernet
switch with optical and electrical 100Mbit/s Ethernet me-
dia access, (f) 18–300V binary inputs, (g) binary input
processing ASIC,(h)RAM, (i) PowerPC microcontroller
(after [32.25])
application-specific IC (ASIC) or application-specific
standard part (ASSP), the approach now includes
the design and use of complex reconfigurable logic
parts with embedded processors. In addition other
application-oriented blocks of intellectual property,
such as processors, memories or special-purpose func-
tions from third parties are incorporated into unique
designs.
These complex field-programmable gate arrays
(FPGAs) are offered by several vendors. The guiding
principle behind this approach to SoC is to combine
large amounts of reconfigurable logic with embedded
RISC processors, in order to enable highly flexible
and tailorable combinations of hardware and software
processing to be applied to a design problem. Algo-
rithms that contain significant amounts of control logic,
plus large quantities of dataflow processing, can be
partitioned into the control RISC processor with recon-
figurable logic for hardware acceleration.
Another important facet of the evolution of embed-
ded systems is the emergence of distributed embed-
ded systems, frequently termed networked embedded
systems, where the word networked signifies the
importance of the networking infrastructure and com-
munication protocol. A networked embedded system
is a collection of spatially and functionally distributed
embedded nodes, interconnected by means of wired
and/or wireless communication infrastructure and pro-
tocols, and interacting with the environment (via
sensor/actuator elements) and with each other. Within
the system, a master node can also be included to co-
ordinate computing and communication, in order to
achieve specific objectives.
Early implementation of numerical power sys-
tem protection and control devices used specialized
digital signal processing (DSP) units. Today’s imple-
mentations are leveraging the vast computing power
available in general-purpose central processing units
(CPU). As such, PowerPC microcontrollers deliver
high computing power at low power consumption
and, therefore, low power dissipation. Random-access
memory (RAM) is utilized for the program execu-
tion memory and erasable read-only memory (EPROM)
stores program and configuration information. A typ-
ical configuration can include a 400MHz PowerPC,
64MB of EPROM, and 64MB of RAM. The CPU
can be complemented with field-programmable gate
arrays (FPGAs) that integrate logic and signal pre-
processing functionality. An automation device usually
includes a number of printed circuit board assem-
blies (PCBA), accommodating requirements for the
diversity and number of different input and output
circuitry. High-speed serial communication is built in
for intermodule communication that enables the CPU
to send and acquire data from the input and output
modules. Application-specific circuits are designed to
optimize overall technical and economical objectives.
Figure 32.14 shows a sample of a high-performance
CPU module, connected to a binary input and Ethernet
communication module.
32.11 Summary and Emerging Trends
Product automation is a highly dynamic and interdisci-
plinary field of technology.
The attempt to automate almost all individual de-
vices from consumer products to large machines and
systems is an ongoing trend.
Part D 32.11
558 Part D Automation Design: Theory and Methods for Integration
It is driven by the advances in miniaturization,
cost, and performance of electronic components and the
standardization of cross-device functions such as com-
munication.
The broad application range of product automation
requires both general understanding of the development
of electronics and software as well as specific knowl-
edge of the tasks of the products to be automated.
With a higher degree of standardization and modu-
larization of embedded systems the implementation of
product automation will continue with high speed.
To facilitate an efficient implementation of embed-
ded systems as the heart of product automation future
research will focus on three areas:
•
Reference designs and architecture
•
Seamless connectivity and middleware
•
System design methods and tools
The target will be a generic platform of abstract com-
ponents with high reusability for the applications. This
platform shall facilitate a standardized interface to the
environment and allow for the addition of application-
specific modules. An overriding feature here is the
lowest possible power consumption of the embedded
systems.
Further steps will deal with the self-configuration
and self-organization of components that form the prod-
uct automation system. There is a clear trend towards
ubiquitous connectivity schemes and networks for those
systems.
Last not least, design methods and tools must be
further developed addressing the various levels of the
complex systems. This set of methods will include open
interface standards, automatic validation and testing as
well as simulation. We willalso see progress in therapid
design and prototyping of complex systems.
References
32.1 V.L. Trevathan (Ed.): A Guide to the Automation
Body of Knowledge, 2nd edn. (ISA, Durham 2006)
32.2 J. Fraden: Handbook of Modern Sensors: Physics,
Designs, and Applications (Springer, New York
2003)
32.3 J.S. Wilson: Sensor Technology Handbook (Elsevier,
Amsterdam 2005)
32.4 G.K. McMillan, D.M. Considine: Process/Instruments
and Controls Handbook (McGrawHill,NewYork
1999)
32.5 N.S. Nise: Control Systems Engineering (Wiley, New
York 2007)
32.6 R.C. Dorf, R.H. Bishop: Modern Control Systems
(Prentice Hall, Upper Saddle River 2007)
32.7 H. Janocha: Actuators: Basics and Applications
(Springer, New York 2004)
32.8 B. Nesbitt: Handbook of Valves and Actuators
(Butterworth–Heinemann, Oxford 2007)
32.9 R. Huck: Feeling the heat, ABB Rev. Spec. Rep.
Instrum. Anal. (2006) pp. 17–19
32.10 W. Scholz: Performing under pressure, ABB Rev.
Spec. Rep. Instrum. Anal. (2006) pp. 14–16
32.11 K. Bohnert, P. Guggenbach: A revolution in DC high
current measurement, ABB Rev. 1, 6–10 (2005)
32.12 P. Krippner, B. Andres, P. Szasz, T. Bauer, M. Wet-
zko: Microsystems at work, ABB Rev. 4,68–73
(2006)
32.13 C. Liu: Foundations of MEMS (Prentice Hall, Upper
Saddle River 2005)
32.14 J.W. Gardner, V. Varadan, O.O. Awadelkarim: Mi-
crosensors, MEMS and Smart Devices (Wiley, New
York 2001)
32.15 F. Viaro: Breaking news, ABB Rev. 3,27–31(2004)
32.16 A. Hughes: Electric Motors and Drives (Elsevier, Am-
sterdam 2005)
32.17 I. Ruohonen: Drivers of change, ABB Rev. 2,23–25
(2006)
32.18 M. Paakkonen: Simplicity at your fingertips, ABB
Rev. Spec. Rep. Motors Drives (2004) pp. 55–57
32.19 S.Y. Nof: Handbook of Industrial Robotics (Wiley,
New York 1999)
32.20 F.L. Lewis, D.M. Dawson, C.T. Abdallah: Robot
Manipulator Control: Theory and Practice (Marcel
Dekker, New York 2004)
32.21 H.J. Andersson: Picking pizza picker, ABB Rev. Spec.
Rep. Robot. (2005) pp. 31–34
32.22 C. Bredin: Team-mates, ABB Rev. Spec. Rep. Robot.
(2005) pp. 53–56
32.23 S. Keeping: The future of instrumentation, ABB Rev.
Spec. Rep. Instrum. Anal. (2006) pp. 40–43
32.24 G. Martin, R. Zurawski: Trends in embedded sys-
tems, ABB Rev. 2, 9–13 (2006)
32.25 K. Scherrer: Embedded power protection, ABB Rev.
2, 18–22 (2006)
Part D 32

559
Service Autom
33. Service Automation
Friedrich Pinnekamp
A fast and effective industrial service, supporting
plants with a broad spectrum of assistance from
preventive maintenance to emergency repair, rests
on two legs: the physical transport of people and
equipment, and the provision of the vast variety
of information required by service personnel.
While the automation of physical movement is
limited, data management for efficient servicing,
including optimized logistics for transport, is
increasingly expanding throughout the service
industry.
This chapter discusses the basic requirements
for the automation of service and gives examples
of how the challenging issues involved can be
solved.
33.1 Definition of Service Automation ........... 559
33.2 Life Cycle of a Plant .............................. 559
33.3 Key Tasks and Features
of Industrial Service.............................. 560
33.4 Real-Time Performance Monitoring........ 562
33.5 Analysis of Performance ........................ 563
33.6 Information Required for Effective
and Efficient Service ............................. 563
33.7 Logistics Support .................................. 566
33.8 Remote Service..................................... 567
33.9 Tools for Service Personnel .................... 568
33.10 Emerging Trends:
Towards a Fully Automated Service ........ 568
References .................................................. 569
33.1 Definition of Service Automation
To be able to describe the automation of service, we
must first define what we mean by service. While it is
obvious that in the context of this Handbook we are
not talking about public religious worship or the act
of putting a ball into play in a tennis match, the wide
application of the word service still requires a stricter
definition.
Service in general is an act of helpful activity, but
in the context of this chapter we shall restrict our-
selves to considering the provision of the activities that
industry requires. In particular, we want to address
organized systems of apparatus, appliances, employ-
ees, etc. for providing supportive activities to industrial
operations.
In this narrower sensewe will discuss how industrial
service is automated. Other types of service automation
are discussed in more detail in Chaps. 62, 65, 66, 68 and
71–74 of this Handbook.
33.2 Life Cycle of a Plant
Everyphysical object inuse shows signs ofwear oncein
operation. This istrue forcars, airplanes, ships, comput-
ers, and combining many individual devices, for plants.
Operators of an industrial plant are well aware of
this natural behavior of equipment and react accord-
ingly to avoid deterioration of plant performance.
The value of the installation is decreasing, the
reason for the depreciation, and there are different
strategies for countermeasures.
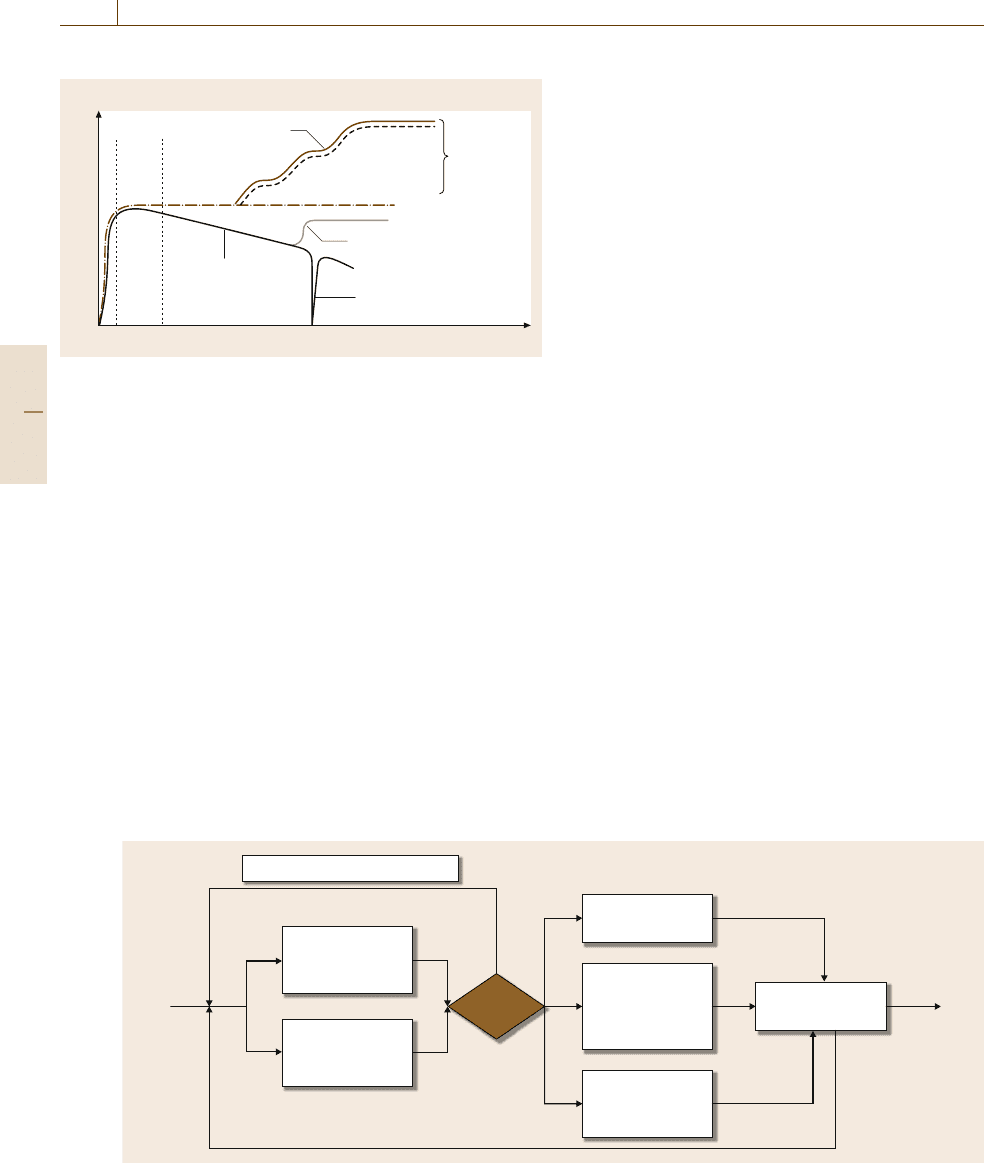
Figure 33.1 shows an overview of the main strate-
gies to extend the useful life cycle of an industrial
plant.
Part D 33
560 Part D Automation Design: Theory and Methods for Integration
Va lues to customer through maintenance
Optimized
maintenance line
Upgrade
retrofit or
replace
Maintenance
Aging
Overhaul
Repair
Time
Fig. 33.1 Various approaches to maintenance during the lifecycle of
an industrial plant [33.5]
Continuous maintenance is a way to keep perfor-
mance at a high level, while overhaul is done at regular
intervals and repair in case of need (see Chap.42 on Re-
liability, Maintenance and Safety, and [33.1–4]). When
retrofit and replacement is combined with a perfor-
mance upgrade, the value of the plant can even be
increased.
Performance ofmaintenance, overhaul, repair or up-
grade has an associated cost and which strategy is most
beneficial depends very much on the plant concerned.
A car manufacturer with a robotized workflow and high
production rate cannot afford the outage of a line due to
a malfunctioning robot, and the cost of a standing line
can easily be calculated. However, a factory in batch
operation with long delays in production may be less
sensitive to an outage.
In any case the cost of service shall be as low as
possible to provide a positive balance to the economic
equation. Cost of service has three main elements: the
parts that have to be replaced, the man-hours for per-
forming the service, and last but not least, the cost of
interrupted production, the latter being proportional to
time of outage.
Thus time and cost efficiency are the critical fac-
tors of any service and are the main driving forces
to automate the task to the highest possible extent.
In this sense service is following the trend of imple-
menting information technology (IT) to speed up and
rationalize its performance, as is done in office work or
production.
33.3 Key Tasks and Features of Industrial Service
Before we discuss the automation of industrial services,
we must describe the aspects and tasks of industrial ser-
vice in order to understand the different approaches to
automation in this area. Service comes onto the stage
after an industrial plant or subsystems of plants or even
individual products in an industrial operation have been
installed and placed into operation.
Order spare
parts and tools
Logistics of
persons and
material
Measure the
actual
performance
No immediate service required
Forecast the
future
performance
Decide
Carry out
service
Provide all
information to
service
personnel
Fig. 33.2 Major steps in industrial service
For the operator of an industrial plant, it is
of utmost important that the equipment is available
with optimum performance at any time that it is
needed. For some systems in a plant this means 24h
a day and 365days a year, whereas for others this
may apply for only a few weeks spread over the
year.
Part D 33.3
Service Automation 33.3 Key Tasks and Features of Industrial Service 561
Even though industrial plants prefer to have equip-
ment that does not require any service, maintenance
or repair, planned outage for overhaul is generally ac-
cepted and sometimes unavoidable.A largerotating kiln
in a cement plant, for example, must usually be fit-
ted with a new liner every year, stopping production
for a short time. Mostly unacceptable, however, are un-
planned outages due to malfunction of equipment.
The better prepared a supplier of this equipment is
to react to these unplanned events, the more appreciated
this service will be.
Taking this into account, industrial service must
strive to:
•
Keep equipment at maximum performance all the
time
•
Provide well-planned service at times of planned
outage
•
Restore optimum performance as quickly and effec-
tively as possible after unplanned outages.
Figure 33.2 shows the major steps to be taken for
any service action. As we can see in this figure, there
is a layer of information gathering, analyzing, and ex-
change and a logistic element, including the physical
transport. Both elements can be automated and it is ob-
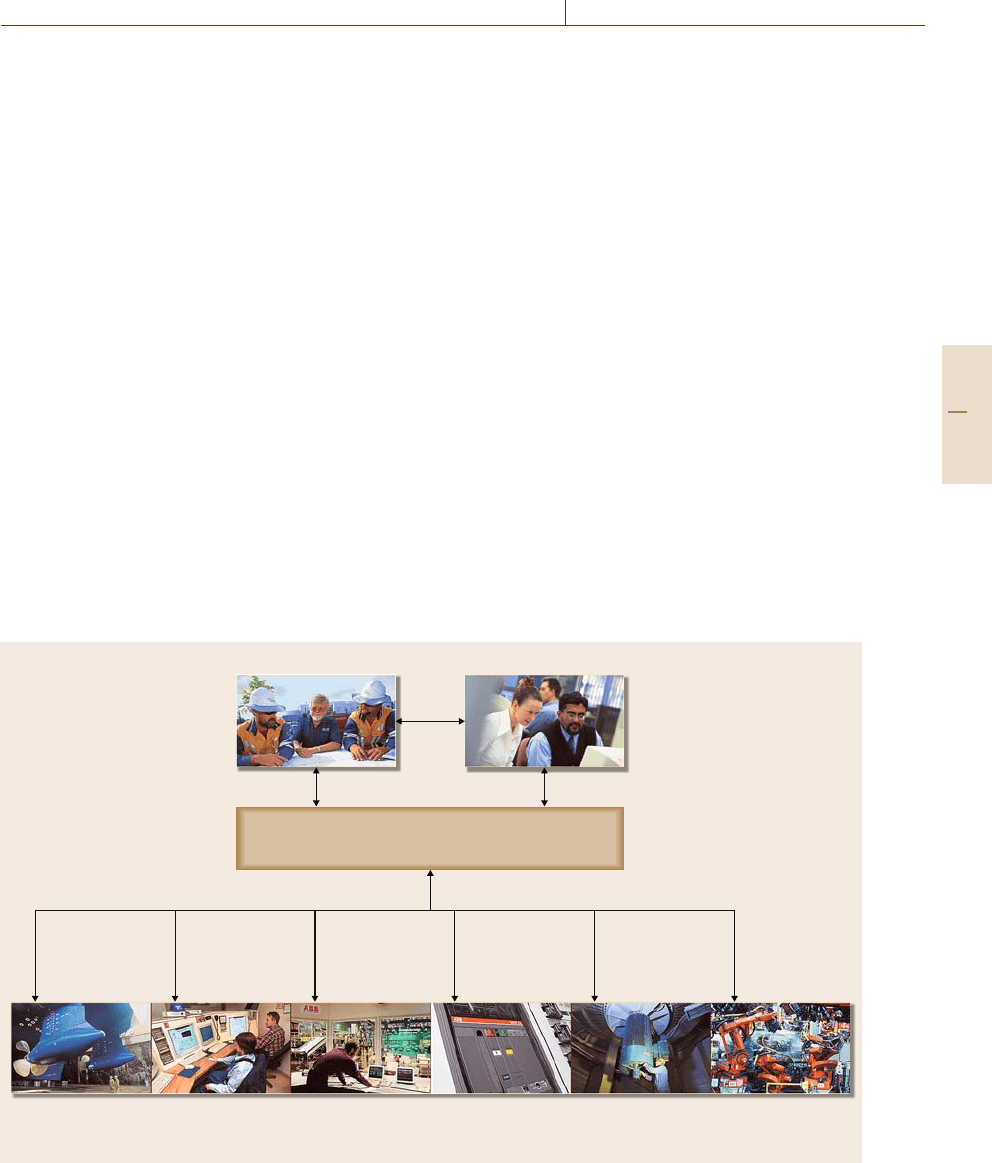
Control systems Drives and motors RoboticsMarine Industrial
IT
enabled
products and systems
Instruments and
low-voltage
products
Field engineer
Propulsion
predictive
maintenance
Asset
optimization
Web-based
maintenance
management
softwae
On-line
parts
Remote
drive
monitoring
Remote
robot
services
Call center
Analysis & feedback layer
Communication layer
Connection layer
Internet, modem, direct line, etc.
Fig. 33.3 Tasks and communication channels of a service organization [33.6]
vious that the information-related aspect has attracted
the highest degree of automation to date.
In a more detailed view, the following aspects have
to be considered:
•
The actual performance of the equipment must be
known.
•
A forecast of possible changes in the performance
must be available.
•
Detailed knowledge of the scheduled use of the
equipment is necessary.
•
Efficient, real-time communication about distur-
bances must exist.
•
Optimum logistics must enable fast and effective
service action.
In more technical terms, an optimum service is based
on:
•
Real-time performance monitoring of the equip-
ment
•
Knowledge-based extrapolation of future perfor-
mance
•
Knowledge about use of the equipment in the indus-
trial environment
Part D 33.3
562 Part D Automation Design: Theory and Methods for Integration
•
Adequate communication channels between equip-
ment and service provider
•
Access to relevant equipment data and metadata for
the service personnel
•
Access to hardware and tools to restore equipment
performance efficiently.
Figure 33.3 shows the tasks and communication chan-
nels for a service organization that takes care of a vari-
ety of products. Each of these tasks can be automated.
The following sections describe in more detail
the critical aspects of service and how they can be
automated.
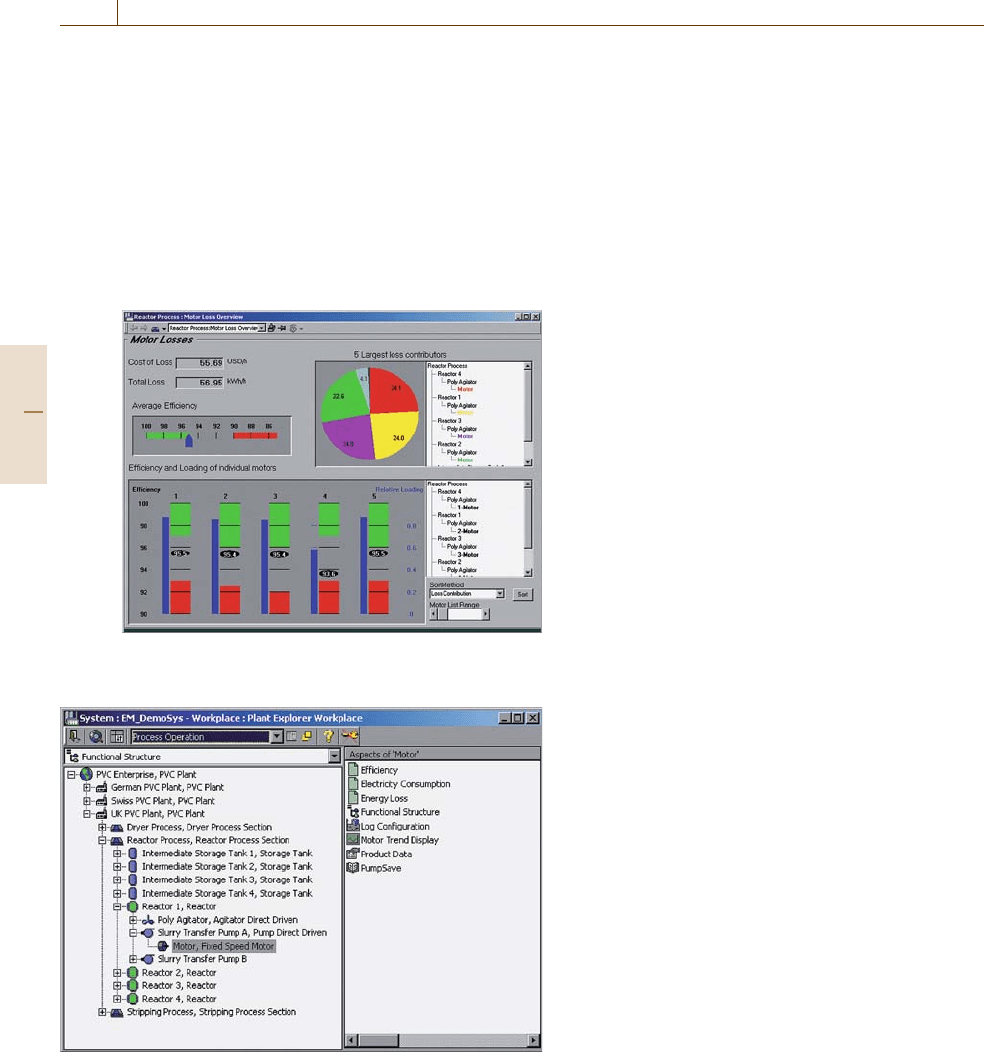
33.4 Real-Time Performance Monitoring
Fig. 33.4 Real-time measurement of the energy efficiency
of five motors in a plant [33.7]
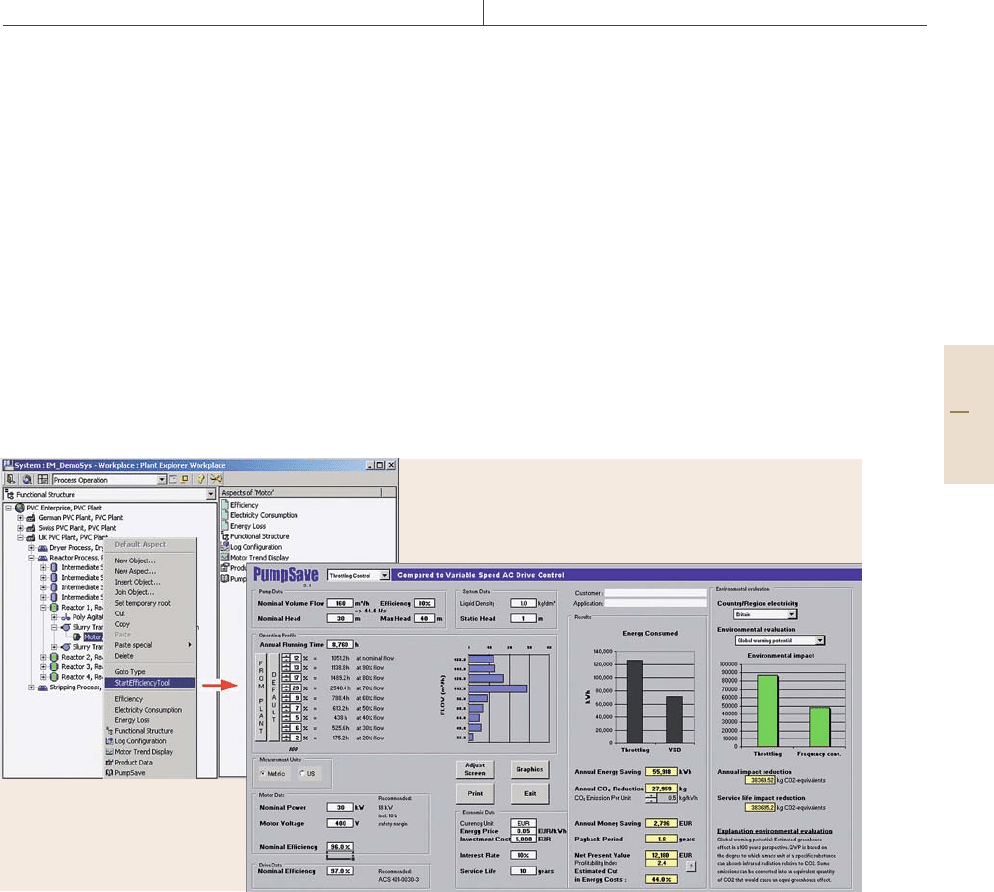
Fig. 33.5 Structured view of devices in a plant with some aspects
related to them [33.7]
In order to keep a plant in optimum operation,
all devices must work properly; this means that their
performance must be monitored. This can be done
by regular inspection by service personnel, or in an
automated way, i.e., by equipping each device with ad-
equate sensors [33.8–10].
In Chap.20 the sensors suitable for the automation
of the functions of a product are described in more
detail. As an illustrative example of the automation
of service, we have chosen a motor, which is a typ-
ical example in industry with motors accounting for
more than 60% of the electrical energy consumed by
industry.
Figure 33.4 shows a real-time measurement of five
motors in a plant. Here the specific aspect of efficiency
is displayed, composed from sensors that measure cur-
rent, voltage, heat, and torque. Information of this type
is a useful indicator of the motor’s performance and, to-
gether with other motor data, for example, the vibration
level and its frequency spectrum, can be used to judge
whether intervention is required.
With an efficient data structure (Sect. 33.6) simi-
lar real-time performance can be displayed for all the
devices in a plant, provided that they are equipped
with suitable sensors. Figure 33.5 shows a display
in which the operator can easily view relevant in-
formation from all aspects and systems in his plant.
In this view, the functional structure of the plant is
displayed and, for each physical object, a number
of aspects, shown in the right menu, are listed. In
this example, the plant operator can obtain informa-
tion about the product data of the motor or energy
losses.
All these dataare valuable for theservice task, based
on which predictions about future performance of the
parts can be made.
Part D 33.4
Service Automation 33.6 Information Required for Effective and Efficient Service 563
33.5 Analysis of Performance
An experienced plant operator or service engineer can
use device performance information measured in real
time to determine further actions. Modern IT sys-
tems support this task. The various data are analyzed
and knowledge-based systems propose further actions,
which may for example include the replacement of
a component, a scheduled service within a certain in-
terval or some other preventive intervention. When
more background knowledge is considered in the pro-
gramming, these systems can also include the financial
and environmental consequences of a replacement, as
showninFig.33.6.
The example given in Fig.33.6 also shows that in-
formation from different functions, here engineering,
Fig. 33.6 Result of online real-time analysis of motor performance based on evaluation of various parameters [33.7]
service, and finances, are increasingly being combined
to provide a consistent view of the whole industrial op-
eration.
This accumulated knowledge and experience helps
engineers to decide what equipment needs to be in-
spected and when, as well as to establish where failure
would be least acceptable and cause the most prob-
lems. This makes it easier to see where effort has to
be focused in order to maximize return. It facilitates
the optimization of examination intervals whilst at the
same time identifying equipment for which noninvasive
examinations would be equally effective.
More innovative automation in this direction can be
expected in the future.
33.6 Information Required for Effective and Efficient Service
The amount of data and background information that
a service engineer requires to enable a fast reaction is
enormous; the list below describes the major aspects:
•
Location of the equipment and description of how
to reach it, including local access procedures
•
Technical data, including drawings and part lists
•
Purpose of the equipment and expected perfor-
mance
•
Connection of equipment to other parts ofthe instal-
lation
•
Security issues in handling the equipment
•
Historical data for the equipment, including previ-
ous service actions
Part D 33.6
564 Part D Automation Design: Theory and Methods for Integration
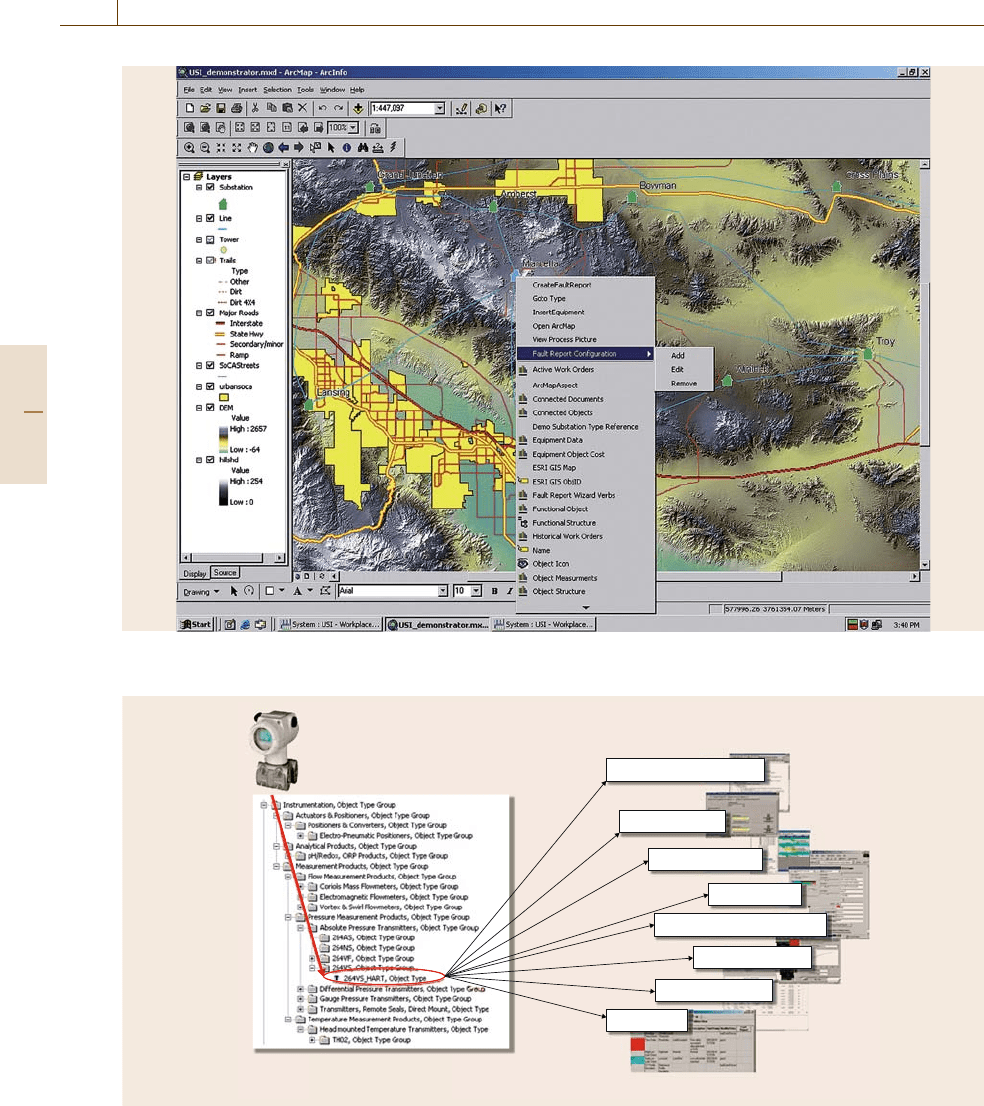
Fig. 33.7 Display of geographical information in relation to a fault in a transmission grid [33.11]
Product documentation
Configuration
Commissioning
Parameterization
Asset monitoring
Operation
Diagnosis
Maintenance management
Real object
Object type, delivered with the
device type library
Each device type object includes
aspects for
Fig. 33.8 Multidimensional structure connecting objects with their various aspects [33.12]
Part D 33.6