Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Control of Uncertain Systems 11.6 Examples 215
Example 11.1:The nonlinear plant model used in this
example is given by
¨
y = f(y,
˙
y)+g(y)u +d
=16
sin(4π y)
4π y
sin(π
˙
y)
π
˙
y
2
+
2+sin[3π(y −0.5)]
u +d ,
which, if d = 0, is the same plant model as in [11.27,
34,38], used as a testbed for proposed controllers. It is
easy to check that the above uncertain system dynamics
are in the form of (11.2) with x =[y,
˙
y]
. For the sim-
ulation, the disturbance d is selected to be band-limited
white noise generated using SIMULINK (version 6.6)
with noise power 0.05, sampletime 0.1s, andseed value
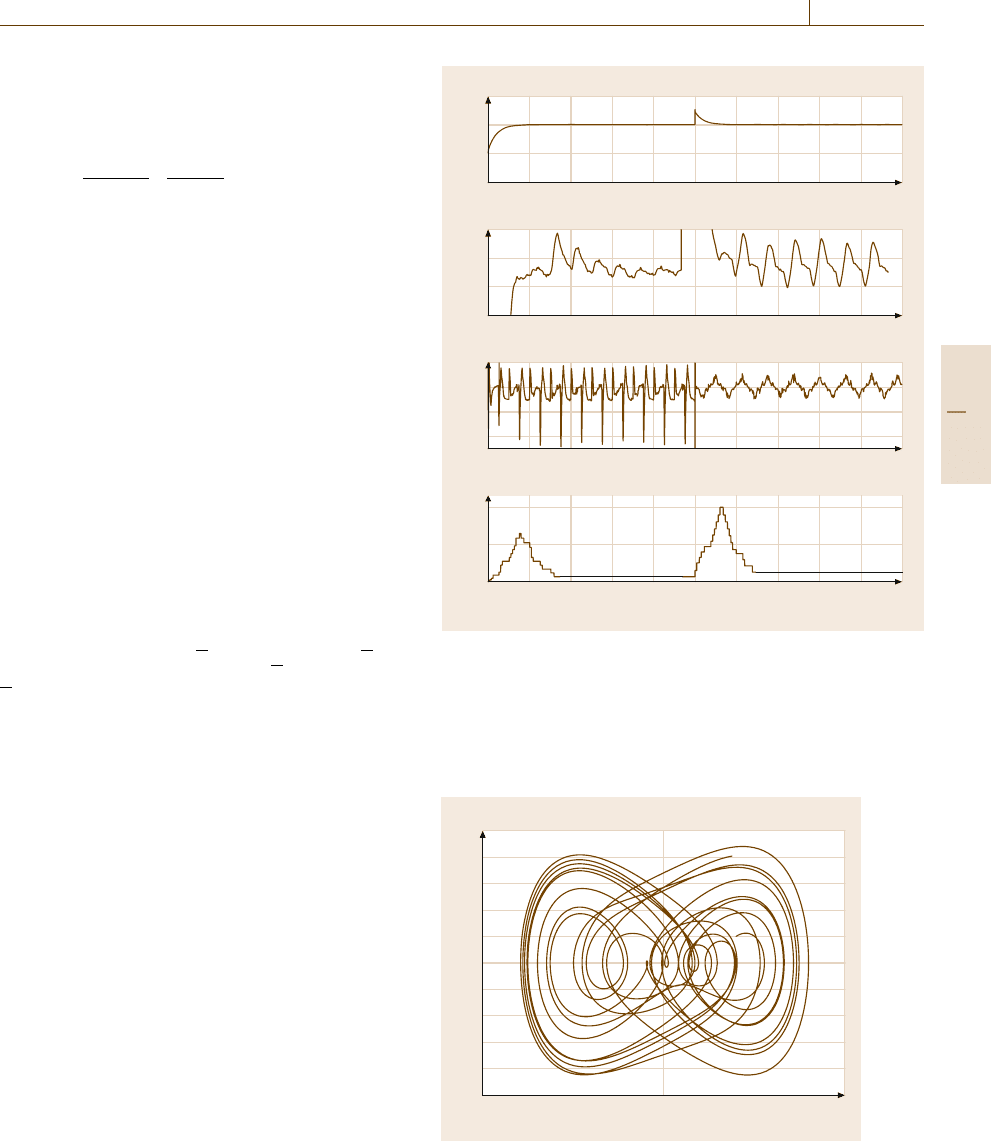
23341, which is shown in Fig.11.11.
The reference signal is the same as in [11.38],
which is the output of a low-pass filter with the
transfer function (1+0.1s)
−3
,drivenbyaunityam-
plitude square-wave input with frequency 0.4Hz and
a time average of 0.5s. The reference signal y
d
and
its derivatives
˙
y
d
and
¨
y
d
are shown in Fig. 11.12.
The grid boundaries for y and
˙
y, respectively, are se-
lected to be (−1.5, 1.5) and (−3.5, 3.5), that is,
x
l
=(−1.5, −3.5)
and x
u
=(1.5, 3.5)
. The rest of
the network’s parameters are d
threshold
= (0.2, 0.3),
e
max
=0.005, T
d
=0.2s,ω
f
=25, ω
f
=−25, ω
g
=5,
ω
g
=0.1, and η
f
=η
g
=1000. The controller’s param-
eters are k=(1, 2), Q
m
=0.5I
2
, d
f
=5, d
g
=2, d
0
=3,
ν = 0.01, and S = 50. The observer’s parameters are
= 0.001, α
1
=10, and α
2
=25. The initial conditions
are y(0) =−0.5and
˙
y(0) = 2.0. The controller per-
formance without disturbance is shown in Fig.11.13,
whereas the controller performance in the presence of
disturbance is illustrated in Fig.11.14.
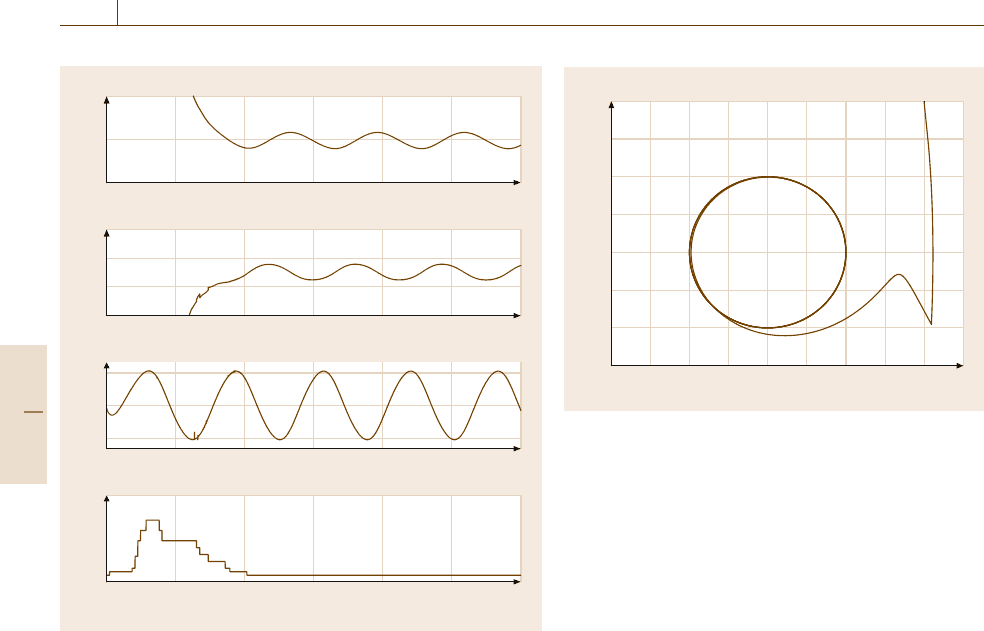
In order to demonstrate the advantages of the self-
organizing RBF network in the proposed controller ar-
chitectures, a different reference signal, y
d
(t) =sin(2t),
is applied at t =25s. It can be seen from Fig.11.15 that
the self-organizing RCRBF network-based direct adap-
tive robust output feedback controller performs very
well for both reference signals. There is no need to
adjust the network’s or the controller’s parameters of-
fline when the new reference signal is applied. The
self-organizing RBF network determines its structure
dynamically by itself as the reference signal changes.
Example 11.2:In this example, the direct adaptive robust
output feedback controller is tested on a time-varying
system. The plant is the Duffing forced oscillation sys-
0
Time (s)
Number of hidden neurons
100
50
0
0
Control input
10
0
–10
–20
0 50
Tracking error (magnified)
× 10
–3
5
0
–5
10 20 30 40 455152535
5010 20 30 40 455152535
5010 20 30 40 455152535
0 50
Tracking error
0.5
0
–0.5
–1
10 20 30 40 455152535
Fig. 11.15 Output feedback controllerperformance with varying ref-
erence signals in Example 11.1
tem [11.28] modeled by
˙
x
1
= x
2
˙
x
2
=−0.1x
2
−x
3
1
+12cos(t)+u .
–5 0 5
x
2
x
1
10
8
6
4
2
0
–2
–4
–6
–8
–10
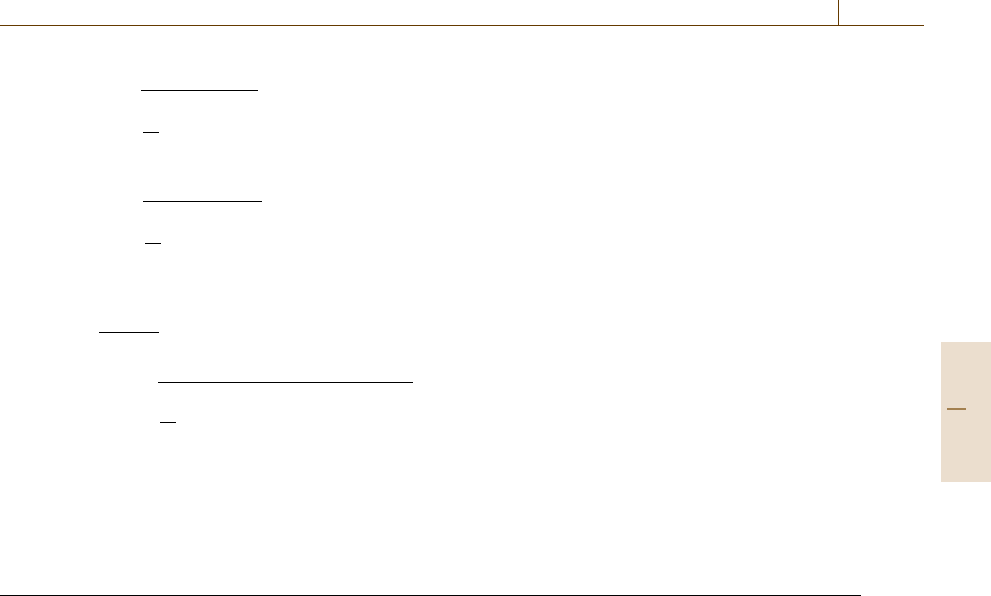
Fig. 11.16 Phase portrait of the uncontrolled system in Ex-
ample 11.2
Part B 11.6
216 Part B Automation Theory and Scientific Foundations
0
30
Time (s)
Number of hidden neurons
50
0
51510 20 25
3051510 20 25
3051510 20 25
3051510 20 25
0
Control input
10
0
–10
0
Tracking error of x
2
× 10
–3
× 10
–3
5
0
–5
5
0
–5
0
Tracking error of x
1
Fig. 11.18 Output feedback controller performancein Example 11.2
The phase portrait of the uncontrolled system is
shown in Fig.11.16 for x
1
(0) = x
2
(0) = 2, t
0
= 0,
–2 –1.5 –1 –0.5 0 0.5 1 1.5 2 2.5
x
2
x
1
2
1.5
1
0.5
0
–0.5
–1
–1.5
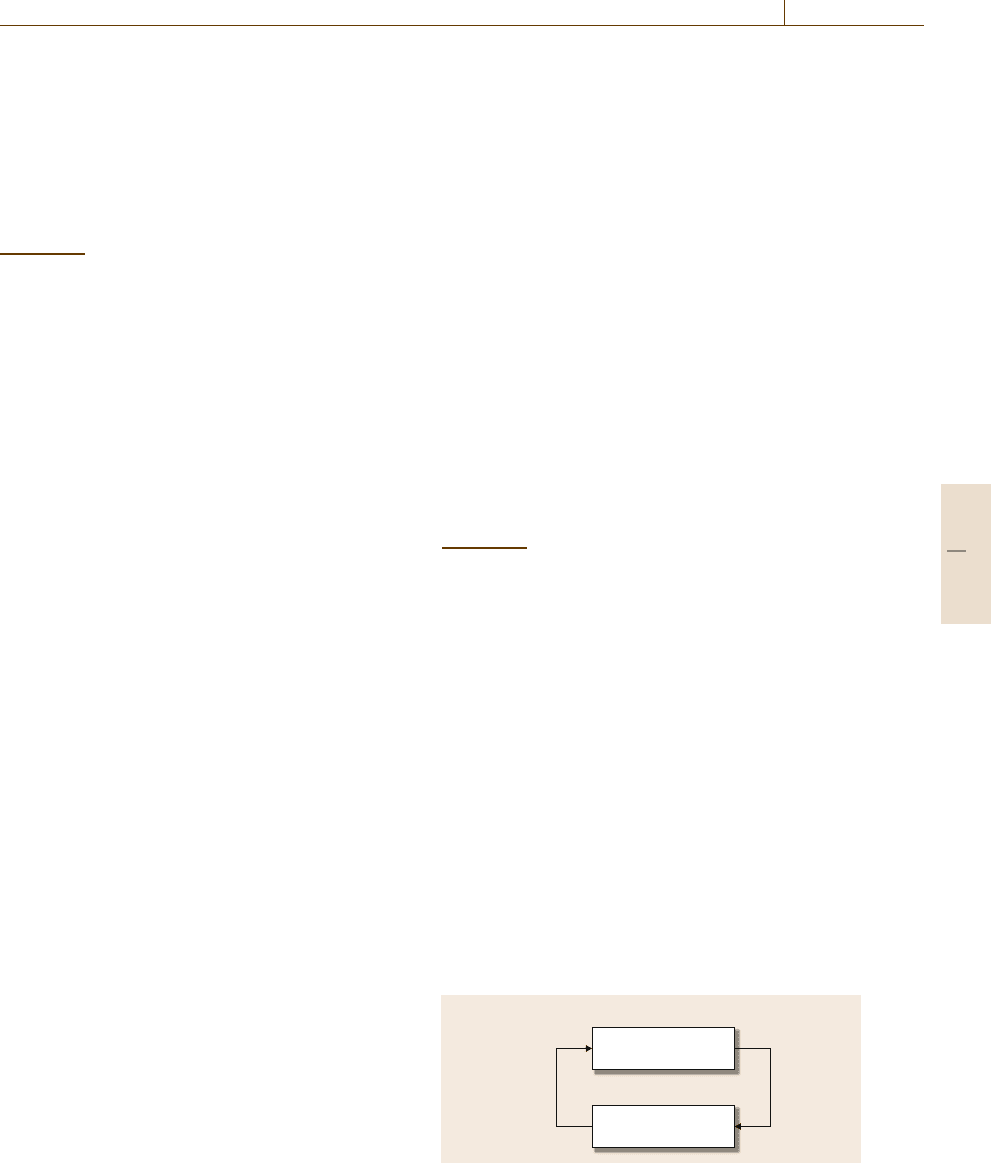
Fig. 11.17 Phase portrait of the closed-loop system driven
by the output feedback controller in Example 11.2
and t
f
= 50. The disturbance d is set to be
zero.
The reference signal, y
d
(t) =sin(t), is used, which
is the unit circle in the phase plane. The grid bound-
aries for y and
˙
y, respectively, are [−2.5, 2.5] and
[−2.5, 2.5]. The design parameters are chosen to be
thesameasinexample11.1except that e
max
= 0.05,
d
f
= 15, and ν = 0.001. The phase portrait of the
closed-loop system is shown in Fig.11.17. It follows
from Fig. 11.18 that the controller performs very well
for this time-varying system.
11.7 Summary
Novel direct adaptive robust state and output feedback
controllers have been presented for the output tracking
control of a class of nonlinear systems with unknown
system dynamics. The presented techniques incorpo-
rate a variable-structure RBF network to approximate
the unknown system dynamics. The network structure
varies as the output tracking error trajectory evolves in
order to ensure tracking accuracy and, at the same time,
avoid redundant network structure. The Gaussian RBF
and the raised-cosine RBF are compared in the sim-
ulations. The property of compact support associated
with the raised-cosine RBF results in significant reduc-
tion of computations required for the network’s training
and output evaluation [11.61]. This feature becomes es-
pecially important when the center grid becomes finer
and the dimension of the network input becomes higher.
The effectiveness of the presenteddirect adaptive robust
controllers are illustrated with two examples.
In order to evaluate and compare different pro-
posed control strategies for the uncertain system given
in (11.1), it is necessary to use performance measures.
In the following, a list of possible performance in-
dices [11.69]isgiven.
•
Transient performance
e
M
= max
t
0
≤t≤t
f
|e(t)|
•
Final tracking accuracy
e
F
= max
t∈[t
f
−2,t
f
]
|e(t)|
Part B 11.7
Control of Uncertain Systems References 217
•
Average tracking performance
L
2
(e) =
%
&
&
&
'
1
t
f
t
f
t
0
|e(τ)|
2
dτ
•
Average control input
L
2
(u) =
%
&
&
&
'
1
t
f
t
f
t
0
|u(τ)|
2
dτ
•
Degree of control chattering
c
u
=
L
2
(Δu)
L
2
(u)
,
where
L
2
(Δu) =
%
&
&
&
'
1
N
N
j=1
u( jΔT)−u[(j −1)ΔT]
2
The approach presented in this chapter has been
used as a starting point towards the development of di-
rect adaptive robust controllers for a class of MIMO
uncertain systems in [11.58]. The MIMO uncertain
system considered in [11.58] can be modeled by the
following set of equations
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
y
(n
1
)
1
= f
1
(x)+
p
(
j=1
g
1j
(x)u
j
+d
1
y
(n
2
)
2
= f
2
(x)+
p
(
j=1
g
2j
(x)u
j
+d
2
.
.
.
y
(n
p
)
p
= f
p
(x)+
p
(
j=1
g
pj
(x)u
j
+d
p
,
(11.65)
where u =
u
1
, u
2
,...,u
p
is the system input vector,
y =
y
1
, y
2
,...,y
p
is the system output vector, d =
d
1
, d
2
,...,d
p
models the bounded disturbance, x =
x
1
, x
2
,...,x
p
∈R
n
is the system state vector with
x
i
=
y
i
,
˙
y
i
,...,y
(n
i
−1)
i
and n =
(
p
i=1
n
i
,and f
i
(x)
and g
ij
(x) are unknown Lipschitz-continuous functions.
References
11.1 S.H.
˙
Zak: Systems and Control (Oxford Univ. Press,
New York 2003)
11.2 D.W. Clarke: Self-tuning control. In: The Control
Handbook, ed. by W.S. Levine (CRC, Boca Raton
1996)
11.3 A.S.I. Zinober: Deterministic Control of Uncertain
Systems (Peregrinus, London 1990)
11.4 R.A. DeCarlo, S.H.
˙
Zak, G.P. Matthews: Variabble
structure control of nonlinear multivariable sys-
tems: A tutorial, Proc. IEEE 76(3), 212–232 (1988)
11.5 V.I. Utkin: Sliding Modes in Control and Optimiza-
tion (Springer, Berlin 1992)
11.6 C. Edwards, S.K. Spurgeon: Sliding Mode Control:
Theory and Applications (Taylor Francis, London
1998)
11.7 S. Gutman: Uncertain dynamical systems – a Lya-
punov min-max approach, IEEE Trans. Autom.
Control 24(3), 437–443 (1979)
11.8 M.J. Corless, G. Leitmann: Continuous state feed-
back guaranteeing uniform ultimate boundedness
for uncertain dynamic systems, IEEE Trans. Autom.
Control 26(5), 1139–1144 (1981)
11.9 J.B. Pomet, L. Praly: Adaptive nonlinear regulation:
Estimation from the Lyapunov equation, IEEE Trans.
Autom. Control 37(6), 729–740 (1992)
11.10 F.-C. Chen, C.-C. Liu: Adaptively controlling non-
linear continuous-time systems using multilayer
neural networks, IEEE Trans. Autom. Control 39(6),
1306–1310 (1994)
11.11 M. Krstic, I. Kanellakopoulos, P.V. Kokotovic: Non-
linear and Adaptive Control Design (Wiley, New
York 1995)
11.12 K.S. Narendra, A.M. Annaswamy: Stable Adaptive
Systems (Prentice Hall, Englewood Cliffs 1989)
11.13 K.J. Åström, B. Wittenmark: Adaptive Control
(Addison-Wesley, Reading 1989)
11.14 S.S. Sastry, A. Isidori: Adaptive control of lin-
earizable systems, IEEE Trans. Autom. Control 34(11),
1123–1131 (1989)
11.15 I. Kanellakopoulos, P.V. Kokotovic, R. Marino:
An extended direct scheme for robust adap-
tive nonlinear control, Automatica 27(2), 247–255
(1991)
11.16 I. Kanellakopoulos, P.V. Kokotovic, A.S. Morse: Sys-
tematic design of adaptive controllers for feedback
linearizable systems, IEEE Trans. Autom. Control
36(11), 1241–1253 (1991)
11.17 D. Seto, A.M. Annaswamy, J. Baillieul: Adaptive
control of nonlinear systems with a triangular
structure, IEEE Trans. Autom. Control 39(7), 1411–
1428 (1994)
11.18 A. Kojic, A.M. Annaswamy: Adaptive control of
nonlinearly parameterized systems with a trian-
gular structure, Automatica 38(1), 115–123 (2002)
11.19 M. Krstic, P.V. Kokotovic: Adaptive nonlineaer
design with controller-identifier separation and
swapping, IEEE Trans. Autom. Control 40(3), 426–
460 (1995)
Part B 11

218 Part B Automation Theory and Scientific Foundations
11.20 A.S. Morse, D.Q. Mayne, G.C. Goodwin: Applica-
tions of hysteresis switching in parameter adaptive
control, IEEE Trans. Autom. Control 34(9), 1343–1354
(1992)
11.21 E.B. Kosmatopoulos, P.A. Ioannou: A switching
adaptive controller for feedback linearizable sys-
tems, IEEE Trans. Autom. Control 44(4), 742–750
(1999)
11.22 E.B. Kosmatopoulos, P.A. Ioannou: Robust switch-
ing adaptive control of multi-input nonlinear
systems, IEEE Trans. Autom. Control 47(4), 610–624
(2002)
11.23 J.S. Reed, P.A. Ioannou: Instability analysis and ro-
bust adaptive control of robotic manipulators, IEEE
Trans. Robot. Autom. 5(3), 381–386 (1989)
11.24 M.M. Polycarpou, P.A. Ioannou: A robust adaptive
nonlinear control design, Automatica 32(3), 423–
427 (1996)
11.25 R.A. Freeman, M. Krstic, P.V. Kokotovic: Ro-
bustness of adaptive nonlinear control to
bounded uncertainties, Automatica 34(10), 1227–
1230 (1998)
11.26 H. Xu, P.A. Ioannou: Robust adaptive control for
a class of MIMO nonlinear systems with guaranteed
error bounds, IEEE Trans. Autom. Control 48(5),
728–742 (2003)
11.27 R.M. Sanner, J.J.E. Slotine: Gaussian networks for
direct adaptive control, IEEE Trans. Neural Netw.
3(6), 837–863 (1992)
11.28 L.-X. Wang: Stable adaptive fuzzy control of non-
linear systems, IEEE Trans. Fuzzy Syst. 1(2), 146–155
(1993)
11.29 C.-Y. Su, Y. Stepanenko: Adaptive control of a class
of nonlinear systems with fuzzy logic, IEEE Trans.
Fuzzy Syst. 2(4), 285–294 (1994)
11.30 M.M. Polycarpou: Stable adaptive neutral control
scheme for nonlinear systems, IEEE Trans. Autom.
Control 41(3), 447–451 (1996)
11.31 L.-X. Wang: Stable adaptive fuzzy controllers with
application to inverted pendulum tracking, IEEE
Trans. Syst. Man Cybern. B 26(5), 677–691 (1996)
11.32 J.T. Spooner, K.M. Passino: Stable adaptive con-
trol using fuzzy systems and neural networks, IEEE
Trans. Fuzzy Syst. 4(3), 339–359 (1996)
11.33 C.-H. Wang, H.-L. Liu, T.-C. Lin: Direct adap-
tive fuzzy-neutral control with state observer and
supervisory controller for unknown nonlinear dy-
namical systems, IEEE Trans. Fuzzy Syst. 10(1), 39–49
(2002)
11.34 E. Tzirkel–Hancock, F. Fallside: Stable control of
nonlinear systems using neural networks, Int. J.
Robust Nonlin. Control 2(1), 63–86 (1992)
11.35 A. Yesildirek, F.L. Lewis: Feedback linearization us-
ing neural networks, Automatica 31(11), 1659–1664
(1995)
11.36
B.S. Chen, C.H. Lee, Y.C. Chang: H
∞
tracking design
of uncertain nonlinear SISO systems: Adaptive fuzzy
approach, IEEE Trans. Fuzzy Syst. 4(1), 32–43 (1996)
11.37 S.S. Ge, C.C. Hang, T. Zhang: A direct method for ro-
bust adaptive nonlinear control with guaranteed
transient performance, Syst. Control Lett. 37(5),
275–284 (1999)
11.38 S. Seshagiri, H.K. Khalil: Output feedback control of
nonlinear systems using RBF neural networks, IEEE
Trans. Neural Netw. 11(1), 69–79 (2000)
11.39 M.I. EI–Hawwary, A.L. Elshafei, H.M. Emara,
H.A. Abdel Fattah: Output feedback control of
a class of nonlinear systems using direct adap-
tive fuzzy controller, IEE Proc. Control Theory Appl.
151(5), 615–625 (2004)
11.40 Y. Lee, S.H.
˙
Zak: Uniformly ultimately bounded
fuzzy adaptive tracking controllers for uncertain
systems, IEEE Trans. Fuzzy Syst. 12(6), 797–811 (2004)
11.41 C.-C. Liu, F.-C. Chen: Adaptive control of non-
linear continuous-time systems using neural
networks – general relative degree and MIMO
cases, Int. J. Control 58(2), 317–335 (1993)
11.42 R. Ord
´
o
˜
nez, K.M. Passino: Stable multi-input
multi-output adaptive fuzzy/neural control, IEEE
Trans. Fuzzy Syst. 7(3), 345–353 (2002)
11.43 S. Tong, J.T. Tang, T. Wang: Fuzzy adaptive control
of multivariable nonlinear systems, Fuzzy Sets Syst.
111(2), 153–167 (2000)
11.44 Y.-C. Chang: Robust tracking control of nonlinear
MIMO systems via fuzzy approaches, Automatica 36,
1535–1545 (2000)
11.45 Y.-C. Chang: An adaptive H
∞
tracking control
for a class of nonlinear multiple-input-multiple-
output (MIMO) systems, IEEE Trans. Autom. Control
46(9), 1432–1437 (2001)
11.46 S. Tong, H.-X. Li: Fuzzy adaptive sliding-mode con-
trol for MIMO nonlinear systems, IEEE Trans. Fuzzy
Syst. 11(3), 354–360 (2003)
11.47 H.K. Khalil, F. Esfandiari: Semiglobal stabilization
of a class of nonlinear systems using output feed-
back, IEEE Trans. Autom. Control 38(9), 1412–1115
(1993)
11.48 H.K. Khalil: Robust servomechanism output feed-
back controllers for a class of feedback linearizable
systems, Automatica 30(10), 1587–1599 (1994)
11.49 H.K. Khalil: Adaptive output feedback control of
nonlinear systems represented by input–output
models, IEEE Trans. Autom. Control 41(2), 177–188
(1996)
11.50 B. Aloliwi, H.K. Khalil: Robust adaptive output
feedback control of nonlinear systems without
persistence of excitation, Automatica 33(11), 2025–
2032 (1997)
11.51 S. Tong, T. Wang, J.T. Tang: Fuzzy adaptive output
tracking control of nonlinear systems, Fuzzy Sets
Syst. 111(2), 169–182 (2000)
11.52 J.-X. Xu, Y. Tan: Nonlinear adaptive wavelet control
using constructive wavelet networks, IEEE Trans.
Neural Netw. 18(1), 115–127 (2007)
11.53 S. Fabri, V. Kadirkamanathan: Dynamic structure
neural networks for stable adaptive control of
Part B 11

Control of Uncertain Systems References 219
nonlinear systems, IEEE Trans. Neural Netw. 7(5),
1151–1166 (1996)
11.54 G.P. Liu, V. Kadirkamanathan, S.A. Billings: Vari-
able neural networks for adaptive control of
nonlinear systems, IEEE Trans. Syst. Man Cybern.
B 39(1), 34–43 (1999)
11.55 Y. Lee, S. Hui, E. Zivi, S.H.
˙
Zak: Variable neural
adaptive robust controllers for uncertain systems,
Int. J. Adapt. Control Signal Process. 22(8), 721–738
(2008)
11.56 J. Lian, Y. Lee, S.H.
˙
Zak: Variable neural adap-
tive robust control of uncertain systems, IEEE Trans.
Autom. Control 53(11), 2658–2664 (2009)
11.57 J. Lian, Y. Lee, S.D. Sudhoff, S.H.
˙
Zak: Vari-
able structure neural network based direct
adaptive robust control of uncertain systems,
Proc. Am. Control Conf. (Seattle 2008) pp. 3402–
3407
11.58 J. Lian, J. Hu, S.H.
˙
Zak: Adaptive robust control:
A switched system approach, IEEE Trans. Autom.
Control, to appear (2010)
11.59 J.P. Hespanha, A.S. Morse: Stability of switched
systems with average dwell-time, Proc. 38th
Conf. Decis. Control (Phoenix 1999) pp. 2655–
2660
11.60 R.J. Schilling, J.J. Carroll, A.F. Al–Ajlouni: Approx-
imation of nonlinear systems with radial basis
function neural network, IEEE Trans. Neural Netw.
12(1), 1–15 (2001)
11.61 J. Lian, Y. Lee, S.D. Sudhoff, S.H.
˙
Zak: Self-
organizing radial basis function network for
real-time approximation of continuous-time dy-
namical systems, IEEE Trans. Neural Netw. 19(3),
460–474 (2008)
11.62 M. Jankovic: Adaptive output feedback control of
nonlinear feedback linearizable systems, Int. J.
Adapt. Control Signal Process. 10, 1–18 (1996)
11.63 T. Zhang, S.S. Ge, C.C. Hang: Stable adaptive control
for a class of nonlinear systems using a modi-
fied Lyapunov function, IEEE Trans. Autom. Control
45(1), 129–132 (2000)
11.64 T. Zhang, S.S. Ge, C.C. Hang: Design and perfor-
mance analysis of a direct adaptive controller for
nonlinear systems, Automatica 35(11), 1809–1817
(1999)
11.65 B. Yao: Integrated direct/indirect adaptive robust
control of SISO nonlinear systems in semi-strict
feedback form, Proc. Am. Control Conf., Vol. 4 (Den-
ver 2003) pp. 3020–3025
11.66 B. Yao: Indirect adaptive robust control of SISO
nonlinear systems in semi-strict feedback forms,
Proc. 15th IFAC World Congr. (Barcelona 2002) pp. 1–
6
11.67 F. Esfandiari, H.K. Khalil: Output feedback stabi-
lization of fully linerizable systems, Int. J. Control
56(5), 1007–1037 (1992)
11.68 N.A. Mahmoud, H.K. Khalil: Asymptotic regulation
of minimum phase nonlinear systems using output
feedback, IEEE Trans. Autom. Control 41(10), 1402–
1412 (1996)
11.69 B. Yao: Lecture Notes from Course on Nonlinear
Feedback Controller Design (School of Mechani-
cal Engineering, Purdue University, West Lafayette
2007 )
Part B 11
“This page left intentionally blank.”

221
Cybernetics a
12. Cybernetics and Learning Automata
John Oommen, Sudip Misra
Stochastic learning automata are probabilistic
finite state machines which have been used to
model how biological systems can learn. The
structure of such a machine can be fixed or can
be changing with time. A learning automaton
can also be implemented using action (choosing)
probability updating rules which may or may not
depend on estimates from the environment being
investigated. This chapter presents an overview
of the field of learning automata, perceived as
a completely new paradigm for learning, and
explains how it is related to the area of cybernetics.
12.1 Basics .................................................. 221
12.2 A Learning Automaton .......................... 223
12.3 Environment ........................................ 223
12.4 Classification of Learning Automata ....... 224
12.4.1 Deterministic Learning Automata ... 224
12.4.2 Stochastic Learning Automata........ 224
12.5 Estimator Algorithms ............................ 228
12.5.1 Rationale and Motivation.............. 228
12.5.2 Continuous Estimator Algorithms ... 228
12.5.3 Discrete Estimator Algorithms ........ 230
12.5.4 Stochastic Estimator Learning
Algorithm (SELA)........................... 231
12.6 Experiments and Application Examples .. 232
12.7 Emerging Trends and Open Challenges ... 233
12.8 Conclusions.......................................... 234
References .................................................. 234
12.1 Basics
What is a learning automaton?Whatislearning all
about? what are the different types of learning automata
(LA) available? How are LA related to the general field
of cybernetics? These are some of the fundamental is-
sues that this chapter attempts to describe, so that we
can understand the potential of the mechanisms, and
their capabilities as primary tools which can be used to
solve a host of very complex problems.
The Webster’s dictionary defines cybernetics as:
... the science of communicationand control theory
that is concerned especially with the comparative
study of automatic control systems (as the nervous
system, the brain and mechanical–electrical com-
munication systems).
The word cybernetics itself has its etymological ori-
gins in the Greek root kybernan, meaning to steer or
to govern. Typically, as explained in the Encyclopaedia
Britannica:
Cybernetics is associated with models in which
a monitor compares what is happening to a sys-
tem at various sampling times with some standardof
what should be happening, and a controller adjusts
the system’s behaviour accordingly.
Of course, the goal of the exercise is to design the
controller so as to appropriately adjust the system’s
behavior. Modern cybernetics is an interdisciplinary
field, which philosophically encompasses an ensemble
of areas including neuroscience, computer science, cog-
nition, control systems, and electrical networks.
The linguistic meaning of automaton is a self-
operating machine or a mechanism that responds to
a sequence of instructions in a certain way, so as to
achieve a certain goal. The automaton either responds
to a predetermined set of rules, or adapts to the en-
vironmental dynamics in which it operates. The latter
types of automata are pertinent to this chapter, and
Part B 12

222 Part B Automation Theory and Scientific Foundations
are termed as adaptive automata. The term learning
in psychology means the act of acquiring knowledge
and modifying one’s behavior based on the experience
gained. Thus, in our case, the adaptive automaton we
study in this chapter adapts to the responses from the
environment through a series of interactions with it. It
then attempts to learn the best action from a setof possi-
ble actions that are offered toit bythe randomstationary
or nonstationary environment in which it operates. The
automaton thus acts as a decision maker to arrive at the
best action.
Well then, what do learning automata have to do
with cybernetics? The answer to this probably lies in
the results of the Russian pioneer Tsetlin [12.1, 2]. In-
deed, when Tsetlin first proposed his theory of learning,
his aim was to use the principles of automata theory
to model how biological systems could learn. Little did
he guess that his seminal results would lead to a com-
pletely new paradigm for learning, and a subfield of
cybernetics.
The operations of the LA can be best described
through the words of the pioneers Narendra and
Thathachar [12.3,p.3]:
... a decision maker operates in the random en-
vironment and updates its strategy for choosing
actions on the basis of the elicited response. The
decision maker, in such a feedback configuration of
decision maker (or automaton) and environment, is
referred to as the learning automaton. The automa-
ton has a finite set of actions, and corresponding
to each action, the response of the environment can
be either favorable or unfavorable with a certain
probability.
LA, thus,find applications in optimization problems
in which an optimal action needs to be determined from
a set of actions. It should be noted that, in this con-
text, learning might be of best help only when there are
high levels of uncertainty in the system in which the
automaton operates. In systems with low levels of un-
certainty, LA-based learning may not be a suitable tool
of choice [12.3].
The first studies with LA models date back to the
studies by mathematical psychologists such as Bush and
Mosteller [12.4], and Atkinson et al. [12.5]. In 1961, the
Russian mathematician, Tsetlin [12.1, 2] studied deter-
ministic LA in detail. Varshavskiiand Vorontsova [12.6]
introduced the stochastic variable structure versions of
the LA. Tsetlin’s deterministic automata [12.1, 2]and
Varshavskii and Vorontsova’s stochastic automata [12.6]
were the major initial motivators of further studies
in this area. Following them, several theoretical and
experimental studies have been conducted by several
researchers: Narendra, Thathachar, Lakshmivarahan,
Obaidat, Najim, Poznyak, Baba, Mason, Papadimitriou,
and Oommen, to mention a few. A comprehensive
overview of research in the field of LA can be found in
the classic text by Narendra and Thathachar [12.3], and
in the recent special issue of IEEE Transactions
[12.7].
It should be noted that none of the work described
in this chapter is original. Most of the discussions, ter-
minologies, and all the algorithms that are explained in
this chapter are taken from the corresponding existing
pieces of literature. Thus, the notation and terminology
can be considered to be off the shelf, and fairly standard.
With regard to applications, the entire field of
LA and stochastic learning, has had a myriad of ap-
plications [12.3, 8–11], which (apart from the many
applications listed in these books) include solutions
for problems in network and communications [12.12–
15], network call admission, traffic control, quality-
of-service routing, [12.16–18], distributed schedul-
ing [12.19], training hidden Markov models [12.20],
neural network adaptation [12.21], intelligent vehicle
control [12.22], and even fairly theoretical problems
such as graph partitioning [12.23].
We conclude this introductory section by empha-
sizing that this brief chapter should not be considered
a comprehensive survey of the field of LA. In partic-
ular, we have not addressed the concept of LA which
possess an infinite number of actions [12.24], systems
which deal with teachers and liars [12.25], nor with
any of the myriad issues that arise when we deal with
networks of LA [12.11]. Also, the reader should not ex-
pect a mathematically deep exegesis of the field. Due to
space limitations, the results available are merely cited.
Additionally, while the results that are reported in the
acclaimed books are merely alluded to, we give spe-
cial attention to the more recent results – namely those
which pertain to the discretized, pursuit, and estimator
algorithms. Finally, we mention that the bibliography
cited here is by no means comprehensive. It is brief and
is intended to serve as a pointer to the representative
papers in the theory and applications of LA.
Part B 12.1
Cybernetics and Learning Automata 12.3 Environment 223
12.2 A Learning Automaton
In the field of automata theory, an automaton can be de-
fined as a quintuple consisting of a set of states, a set
of outputs or actions, an input, a function that maps the
current state and input to the next state, and a function
that maps a current state (and input) into the current
output [12.3,8–11].
Definition 12.1
A LA is defined by a quintuple A, B, Q, F(·, ·), G(·),
where:
(i) A ={α
1
,α
2
,...,α
r
} is the set of outputs or
actions, and α(t) is the action chosen by the au-
tomaton at any instant t.
(ii) B ={β
1
,β
2
,...,β
m
} is the set of inputs to the au-
tomaton. β(t) is the inputat any instant t. The set B
can be finite or infinite.In this chapter, we consider
the case when m = 2, i.e., when B ={0, 1}, where
β =0 represents the event that the LA has been re-
warded, and β =1 represents the event that the LA
has been penalized.
(iii) Q ={q
1
, q
2
,...,q
s
} is the set of finite states,
where q(t) denotes the state of the automaton at
any instant t.
(iv) F(·, ·) : Q × B → Q is a mapping in terms of
the state and input at the instant t, such that,
q(t +1) = F(q(t),β(t)). It is called a transition
function, i. e., a function that determines the state
of the automaton at any subsequent time instant
t +1. This mapping can either be deterministic or
stochastic.
(v) G(·) is a mapping G : Q → A, and is called
the output function. Depending on the state at
a particular instant, this function determines the
output of the automaton at the same instant as
α(t) = G(q(t)). This mapping can, again, be either
deterministic or stochastic. Without loss of gener-
ality, G is deterministic.
If the sets Q, B,andA are all finite, the automaton is
said be finite.
12.3 Environment
The environment E typically refers to the medium in
which the automaton functions. The environment pos-
sesses all the external factors that affect the actions of
the automaton. Mathematically, an environment can be
abstracted by a triple A, C, B. A, C,andB are defined
as:
(i) A ={α
1
,α
2
,...,α
r
} is the set of actions.
(ii) B ={β
1
,β
2
,...,β
m
} is the output set of the envi-
ronment. Again, we consider the case when m =2,
i.e., with β = 0 representing a reward,andβ = 1
representing a penalty.
(iii) C ={c
1
, c
2
,...,c
r
} is a set of penalty probabili-
ties, where element c
i
∈C corresponds to an input
action α
i
.
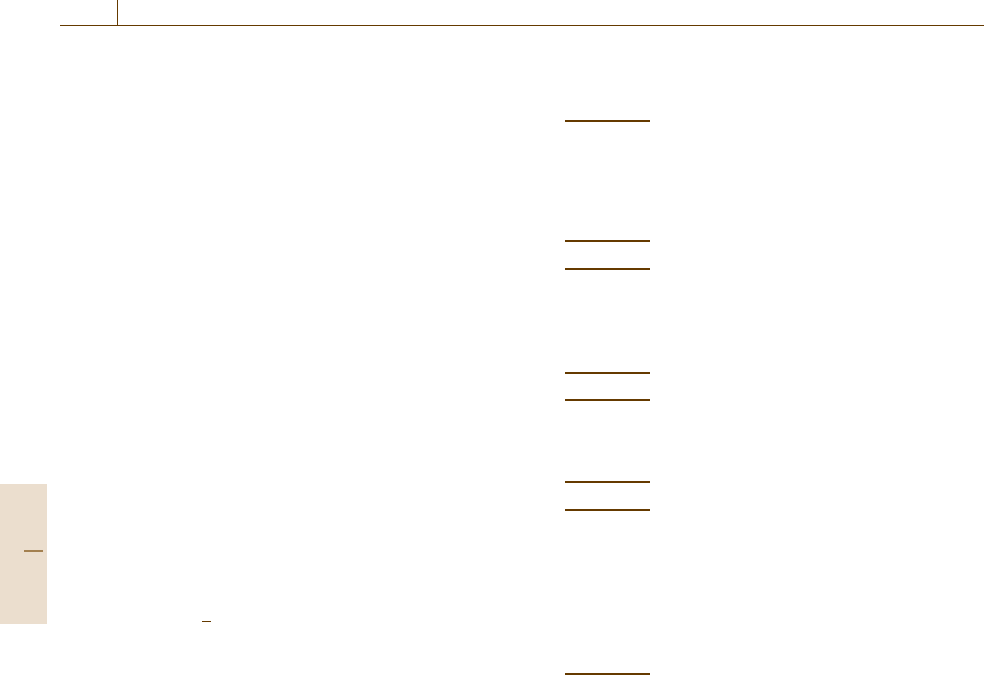
The process of learning is based on a learning
loop involving the two entities: the random environ-
ment (RE), and the LA, as illustrated in Fig.12.1.In
the process of learning, the LA continuously interacts
with the environment to process responses to its vari-
ous actions (i.e., its choices). Finally, through sufficient
interactions, the LA attempts to learn the optimal ac-
tion offered by the RE. The actual process of learning is
represented as a set of interactions between the RE and
the LA.
The RE offers the automaton with a set of possible
actions {α
1
,α
2
,...,α
r
} to choose from. The automa-
ton chooses one of those actions, say α
i
, which serves
as an input to the RE. Since the RE is aware of the un-
derlying penalty probability distribution of the system,
depending on the penalty probability c
i
corresponding
to α
i
,itprompts the LA with a reward (typically de-
noted by the value 0), or a penalty (typically denoted
by the value 1). The reward/penalty information (corre-
sponding to the action) provided to the LA helps it to
choose the subsequent action. By repeating the above
Random
environment
Learning
automaton
β ∈ {0, 1}α ∈ {α
1
, ..., α
r
}
c
i
∈ {c
1
, ..., c
r
}
Fig. 12.1 The automaton–environment feedback loop
Part B 12.3
224 Part B Automation Theory and Scientific Foundations
process, through a series of environment–automaton in-
teractions, the LA finally attempts to learn the optimal
action from the environment.
We now provide a few important definitions used
in the field. P(t) is referred to as the action probabil-
ity vector, where, P(t) =[p
1
(t), p
2
(t),...,p
r
(t)]
,in
which each element of the vector
p
i
(t) =Pr[α(t) =α
i
], i = 1,...,r , (12.1)
such that
r
i=1
p
i
(t) =1 ∀t .
Given an action probability vector, P(t) at time t,the
average penalty is
M(t) = E[β(t)|P(t)]=Pr[β(t) =1|P(t)]
=
r
i=1
Pr[β(t) =1|α(t) =α
i
]Pr[α(t) =α
i
]
=
r
i=1
c
i
p
i
(t) . (12.2)
The average penalty for the pure-chance automaton is
given by
M
0
=
1
r
r
i=1
c
i
. (12.3)
As t →∞, if the average penalty M(t) < M
0
, at least
asymptotically, the automaton is generally considered
to be better than the pure-chance automaton. E[M(t)] is
given by
E[M(t)]=E{E[β(t)|P(t)]} = E[β(t)] .
(12.4)
A LA that performs better than by pure chance is said
to be expedient.
Definition 12.2
A LA is considered expedient if
lim
t→∞
E[M(t)]< M
0
.
Definition 12.3
A LA is said to be absolutely expedient if
E[M(t +1)|P(t)] < M(t), implying that E[M(t +1)] <
E[M(t)].
Definition 12.4
A LA is considered optimal if lim
t→∞
E[M(t)]=c
l
,
where c
l
=min
i
{c
i
}.
Definition 12.5
A LA is considered -optimal if
lim
n→∞
E[M(t)]< c
l
+ , (12.5)
where >0, and can be arbitrarily small, by a suitable
choice of some parameter of the LA.
It should be noted that no optimal LA exist.
Marginally suboptimal performance, also termed above
-optimal performance, is what LA researchers attempt
to attain.
12.4 Classification of Learning Automata
12.4.1 Deterministic Learning Automata
An automaton is termed a deterministic automaton,if
both the transition function F(·, ·) and the output func-
tion G(·) definedin Sect.12.2 are deterministic.Thus, in
a deterministic automaton, the subsequent state and ac-
tion can be uniquely specified, provided that the present
state and input are given.
12.4.2 Stochastic Learning Automata
If, however, either the transition function F(·, ·)orthe
output function G(·) are stochastic, the automaton is
termed a stochastic automaton. In such an automaton,
if the current state and input are specified, the subse-
quent states and actions cannot be specified uniquely.
In such a case, F(·, ·) only provides the probabilities
of reaching the various states from a given state. Let
F
β
1
, F
β
2
,...,F
β
m
denote the conditional probability
matrices, where each of these conditional matrices F
β
(for β ∈ B)isas×s matrix, whose arbitrary element
f
β
ij
is
f
β
ij
=Pr[q(t +1) =q
j
|q(t) =q
i
,β(t) =β] ,
i, j =1, 2,...,s .
(12.6)
Part B 12.4