Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Control Theory for Automation – Advanced Techniques 10.5 H
∞
Optimal Control 185
It isimportant to prove thatthe jointstate estimation and
control lead to stable closed-loop control. The proof is
based on observing that the complete system satisfies
the following state equations
˙
x
˙
x−
˙
ˆ
x
=
A−B
2
K
2
B
2
K
2
0A−L
2
C
2
x
x−
ˆ
x
+
B
1
B
1
−L
2
D
21
w .
This form clearly shows that the poles introduced by the
controller and those introduced by the observer are sep-
arated from each other. The concept is therefore called
the separation principle. The importance of this obser-
vation lies in the fact that, in the course of the design
procedure the controller poles and the observer poles
can be assigned independently from each other. Note
that the control law u(t) =−K
2
ˆ
x(t) still exhibits an op-
timal controller in the sense that F(G(iω), K(iω))
2
is
minimized.
10.5 H
∞
Optimal Control
Herewithbelow the optimal control in H
∞
sense will be
discussed. The H
∞
optimal control minimizes the H
∞
norm of the overall transfer function of the closed-loop
system
J
∞
=F(G(iω), K(iω))
∞
using a state variable feedback with a constant gain,
where F[G(s), K(s)] denotes the overall transfer func-
tion matrix of the closed-loop system [10.2,6,6,13]. To
minimize J
∞
requires rather involved procedures. As
one option, γ -iteration has already been discussed ear-
lier. In short, as earlier discussionson the norms pointed
out, the H
∞
norm can be calculated using L
2
norms by
J
∞
=sup
z
2
w
2
:w
2
=0
.
10.5.1 State-Feedback Problem
If all the state variables are available then the state vari-
able feedback
u(t) =−K
∞
x(t)
is used with the gain K
∞
minimizing J
∞
. Similarly to
the H
2
optimal control discussed earlier, in each step
of the γ -iteration K
∞
can be obtained via P
c
as the
symmetrical positive-definite or positive-semidefinite
solution of the
A
P
c
+P
c
A−P
c
B
2
D
12
D
12
−1
B
2
P
c
+γ
−2
P
c
B
1
B
1
P
c
+C
1
C
1
=0
Riccati equation, provided that the matrix
A−B
2
D
12
D
12
−1
B
2
P
c
+γ
−2
B
1
B
1
P
c
represents a stable system (i.e., all the eigenvalues are
on the left-hand half plane). Once P
c
belonging to the
minimal γ value has been found the state variable feed-
back is realized by using the feedback gain matrix of
K
∞
=(D
12
D
12
)
−1
B
2
P
c
.
10.5.2 State-Estimation Problem
The optimal state estimation in H
∞
sense requires to
minimize
J
0
∞
=sup
z −
ˆ
z
2
w
2
:w
2
=0
as a function of L. Again, minimization can be per-
formed by γ -iteration. Specifically, γ
min
is looked for to
satisfy J
0
∞
<γ with γ>0forallw. To find the optimal
L
∞
gain the symmetrical positive-definite or positive-
semidefinite solution of the following Riccati equation
is required
P
0
A
+AP
0
−P
0
C
2
D
12
D
12
−1
C
2
P
0
+γ
−2
P
0
C
1
C
1
P
0
+B
1
B
1
=0
provided that
A−P
0
C
2
D
12
D
12
−1
C
2
+γ
−2
P
0
C
1
C
1
represents a stable system, i.e., it has all its eigenval-
ues on the left-hand half plane. Finding the solution P
0
belonging to the minimal γ value, the optimal feedback
gain matrix is obtained by
L
∞
=P
0
C
2
D
21
D
21
−1
.
Then
˙
ˆ
x(t) =A
ˆ
x(t)+B
2
u(t)+L
∞
[y(t)−C
2
ˆ
x(t)]
Part B 10.5
186 Part B Automation Theory and Scientific Foundations
is in complete harmony with the filtering procedure ob-
tained earlier for the state reconstruction in H
2
sense.
10.5.3 Output-Feedback Problem
If the state variables are not available for feedback then
a K(s) controller satisfying J
∞
<γ is looked for. This
controller, similarly to the procedure followed by the
H
2
optimal control design, can be determined in two
phases: first the unavailable states are to be estimated,
then state feedback driven by the estimated states is to
be realized. As far as the state feedback is concerned,
similarly to the H
2
optimal control law, the H
∞
optimal
control is accomplished by
u(t) =−K
∞
ˆ
x(t) .
However, the H
∞
optimal state estimation is more in-
volved than the H
2
optimal state estimation. Namely
the H
∞
optimal state estimation includes the worst-case
estimation of the exogenous w input, and the feedback
matrix L
∞
needs to be modified, too. The L
∗
∞
modified
feedback matrix takes the following form
L
∗
∞
=
I−γ
−2
P
0
P
c
−1
L
∞
=
I−γ
−2
P
0
P
c
−1
P
0
C
2
(D
21
D
21
)
−1
,
then the state estimation applies the above gain accord-
ing to
˙
ˆ
x(t) =(A+B
1
γ
−2
B
1
P
c
)
ˆ
x(t)+B
2
u(t)
+L
∗
∞
[y(t)−C
2
ˆ
x(t)].
Reformulating the above results into a transfer function
form gives
K(s) =K
∞
sI−A−B
1
γ
−2
B
1
P
c
+B
2
K
∞
+L
∗
∞
C
2
−1
L
∗
∞
.
The above K(s) controller satisfies the norm inequal-
ity F(G(iω), K(iω))
∞
<γ and it results in a stable
control strategy if the following three conditions are
satisfied [10.6]:
•
P
c
is asymmetrical positive-semidefinitesolution of
the algebraic Riccati equation
A
P
c
+P
c
A−P
c
B
2
D
12
D
12
−1
B
2
P
c
+γ
−2
P
c
B
1
B
1
P
c
+C
1
C
1
=0 ,
provided that
A−B
2
(D
12
D
12
)
−1
B
2
P
c
+γ
−2
B
1
B
1
P
c
is stable.
•
P
0
is a symmetrical positive-semidefinitesolution of
the algebraic Riccati equation
P
0
A
+AP
0
−P
0
C
2
D
21
D
21
−1
C
2
P
0
+γ
−2
P
0
C
1
C
1
P
0
+B
1
B
1
=0 ,
provided that
A−P
0
C
2
D
21
D
21
−1
C
2
+γ
−2
P
0
C
1
C
1
is stable.
•
The largest eigenvalue of P
c
P
0
is smaller than γ
2
ρ(P
c
P
0
) <γ
2
.
The H
∞
optimal output feedback control design pro-
cedure minimizes the F(G(iω), K(iω))
∞
norm via
γ -iteration andwhile γ
min
is looked forall the three con-
ditions above should be satisfied. The optimal control in
H
∞
sense is accomplished by K(s) belonging to γ
min
.
Remark: Now that we are ready to design optimal
controllers in H
2
or H
∞
sense, respectively, it is worth
devoting a minute to analyze what can be expected from
these procedures. To compare the nature of the H
2
ver-
sus H
∞
norms a relation for G
2
should be found,
where the G
2
norm is expressed by the singular val-
ues. It can be shown that
G
2
=
1
2π
∞
−∞
i
σ
2
i
(G(iω))dω
1/2
.
Comparing now the above expression with
G
∞
=sup
ω
σ(G(iω))
it is seen that G
∞
represents the largest possible sin-
gular value, while G
2
represents the sum of all the
singular values over all frequencies [10.6].
10.6 Robust Stability and Performance
When designing control systems, the design proce-
dure needs a model of the process to be controlled.
So far it has been assumed that the design procedure
is based on a perfect model of the process. Stabil-
ity analysis based on the nominal process model can
be qualified as nominal stability (NS) analysis. Sim-
Part B 10.6
Control Theory for Automation – Advanced Techniques 10.6 Robust Stability and Performance 187
ilarly, closed-loop performance analysis based on the
nominal process model can be qualified as nominal
performance (NP) analysis. It is evident, however, that
some uncertainty is always present in the model. More-
over, an important purpose of using feedback is even
to reduce the effects of uncertainty involved in the
model. The classical approach introduced the notions
of the phase margin and gain margin as measures to
handle uncertainty. However, these measures are rather
crude and contradictory [10.13,22]. Though they work
fine in a number of practical applications, they are not
capable of supporting the design for processes exhibit-
ing unusual frequency behavior (e.g., slightly damped
poles). The postmodern era of control theory places
special emphasis on modeling of uncertainties. Specif-
ically, wide classes of structured, as well as additively
or multiplicatively unstructured uncertainties have been
introduced and taken into account in the design proce-
dure. Modeling, analysis, and synthesis methods have
been developed under the name robust control [10.17,
23,24]. Note that the linear quadratic regulator (LQR)
design method inherits some measures of robustness,
however, in general the pure structure of the LQR regu-
lators does not guarantee stability margins [10.1,6].
As far as the unstructured uncertainties are con-
cerned, let G
0
(s) denote the nominal transfer function
matrix of the process. Then the true plant behavior can
be expressed by
G(s) =G
0
(s)+
a
(s) ,
G(s) =G
0
(s)[I+
i
(s)],
G(s) =[I+
o
(s)]G
0
(s) ,
where
a
(s) represents an additive perturbation,
i
(s)
an input multiplicative perturbation, and
o
(s) an out-
put multiplicative perturbation. These perturbations are
assumed to be frequency independent with bounded
•
(s)
∞
norms concerning their size. Frequency de-
pendence can easily be added to the perturbations by
using appropriate pre- and post-filters.
All the above three perturbation models can be
transformed to a common form
G(s) =G
0
(s)+W
1
(s)(s)W
2
(s) ,
where (s)
∞
≤ 1. Uncertainties extend the gen-
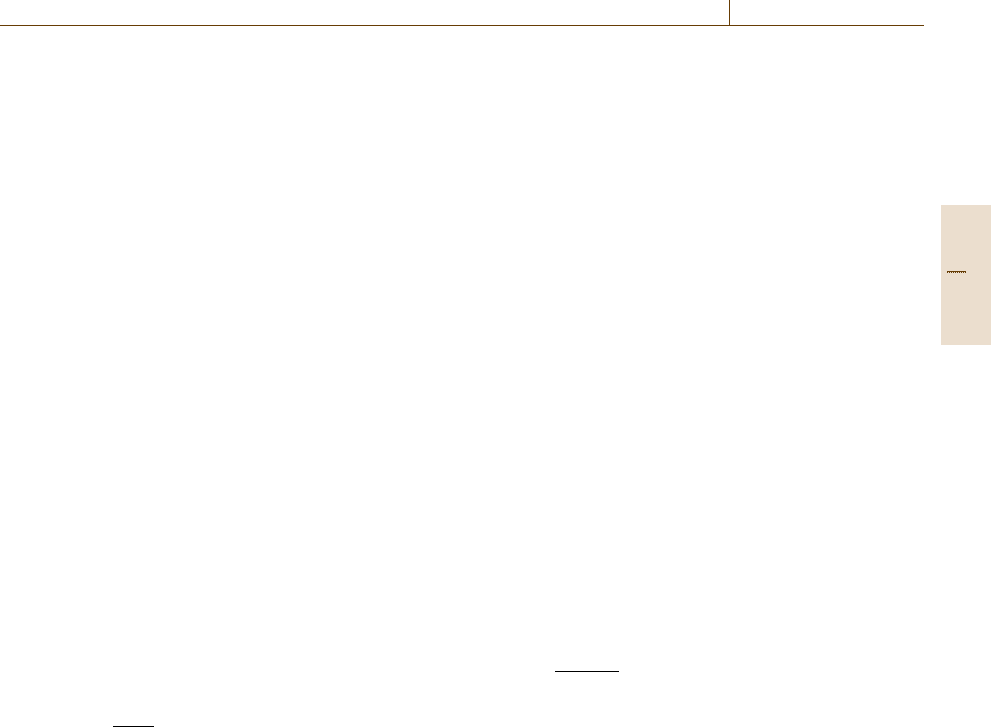
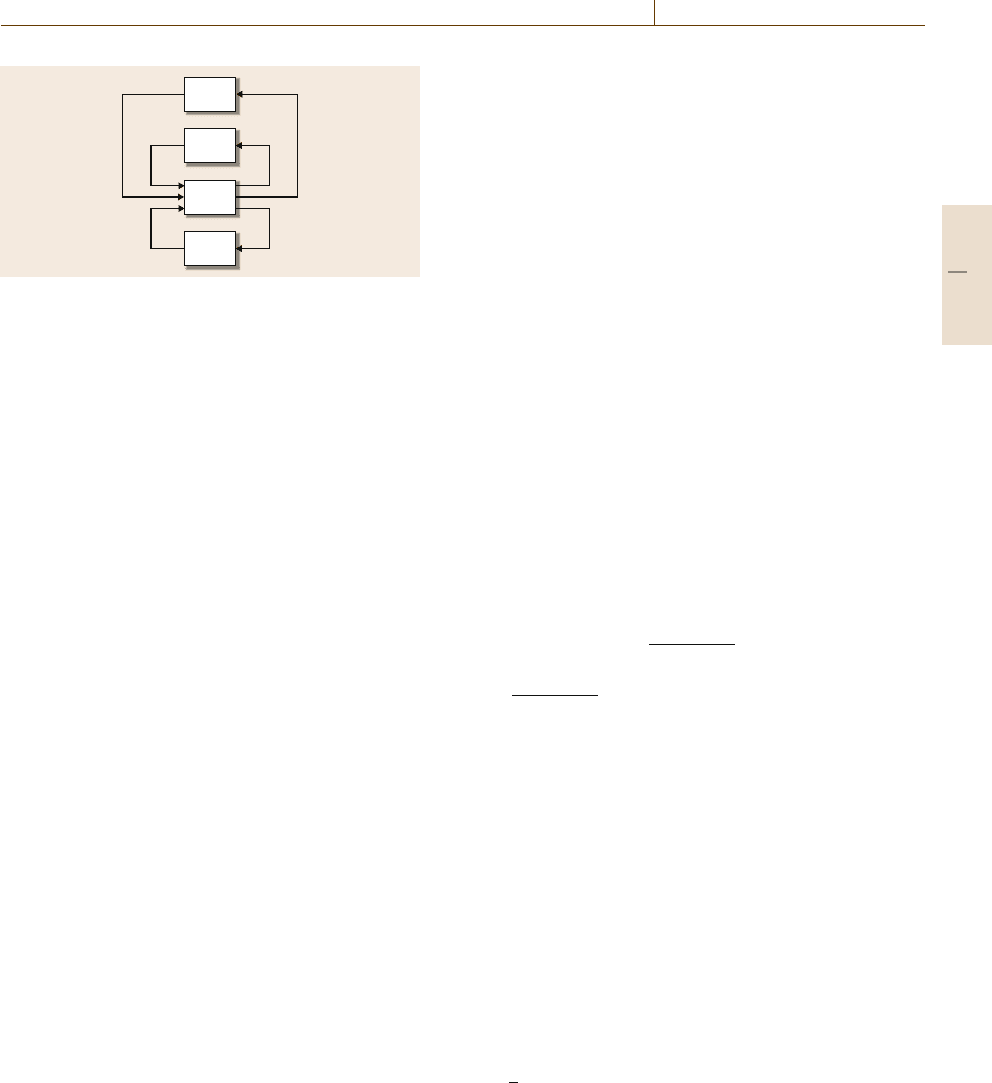
eral control system configuration outlined earlier
in Fig.10.6. The nominal plant now is extended by
a block representing the uncertainties and the feedback
is still applied in parallel as Fig.10.18 shows. This stan-
dard model removes (s), as well as the K(s) controller
from the closed-loop system and lets P(s) represent the
Δ
Δ
(s)
K(s)
z
y
Δ
y
u
Δ
u
w
P(s)
Fig. 10.18 Standard model of control system extended by
uncertainties
rest of the components. It may involve additional output
signals (z) and a set of externalsignals (w) includingthe
set point.
Using a priori knowledge on the plant the concept
of the uncertainty modeling can further be improved.
Separating identical and independent technological
components into groups the perturbations can be ex-
pressed as structured uncertainties
(s) =diag[
1
(s),
2
(s),...,
r
(s)], where
i
(s)
∞
≤1 i =1...r .
Structured uncertainties clearly lead to less conserva-
tive design as the unstructured uncertainties may want
to take care of perturbations never occurring in practice.
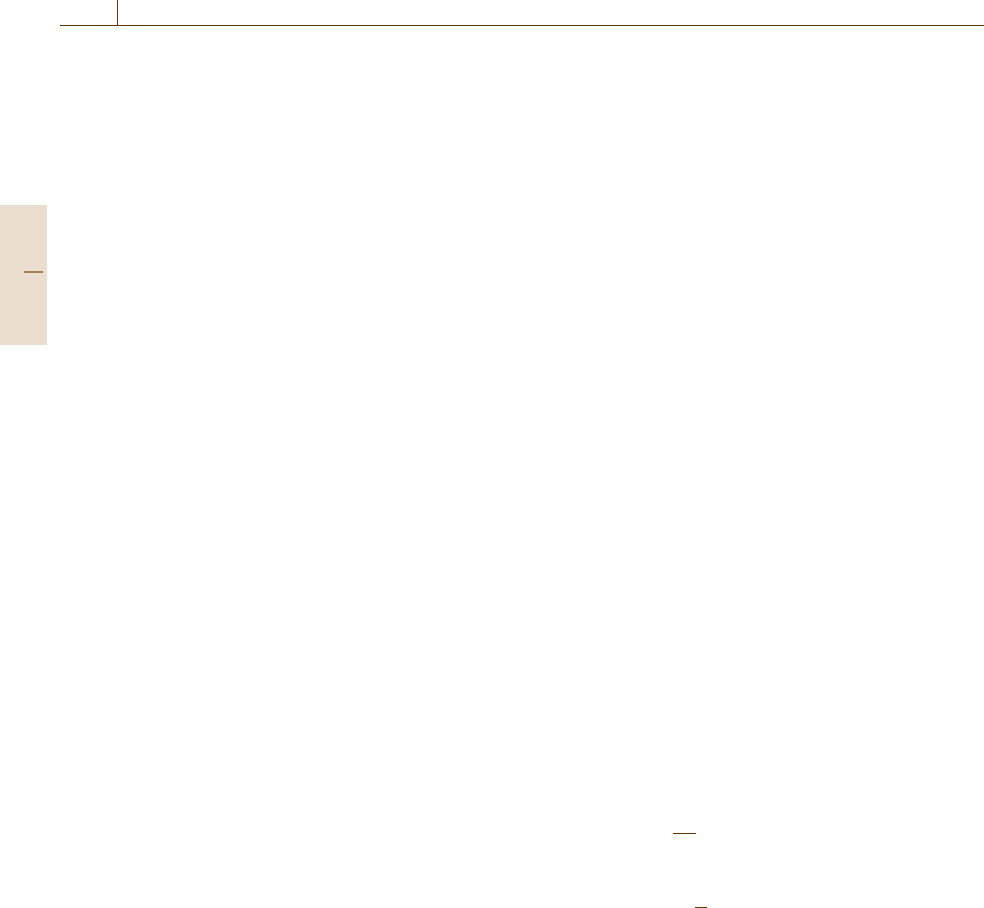
Consider the following control system (Fig.10.19)
as one possible realization of the standard model shown
in Fig.10.18. As a matter of fact here the common
form of the perturbations is used. Derivation is also
straightforward from the standard form of Fig. 10.18
with z =0 and w =r. Handling the nominal plant and
the feedback as one single unit described by R(s) =[I+
K(s)G
0
(s)]
−1
K(s), condition for the robust stability can
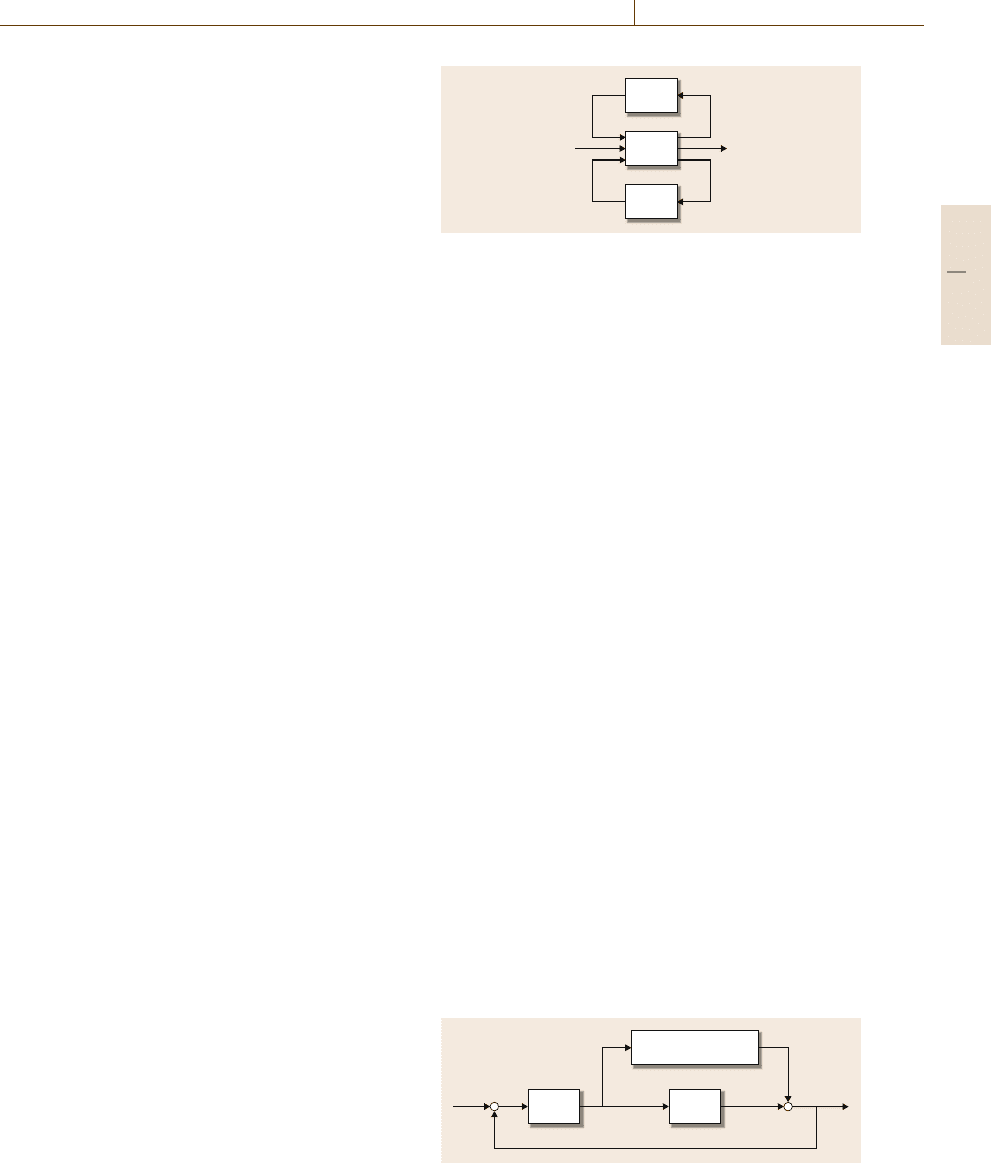
easily be derived by applying the small gain theorem
(Fig.10.20). The small gain theorem is the most funda-
mental result in robust stabilization under unstructured
perturbations. According to the small gain theorem any
closed-loop system consisting of two stable subsystems
G
1
(s)andG
2
(s) results in stable closed-loop system
provided that
G
1
(iω)
∞
G
2
(iω)
∞
< 1 .
W
1
(s)Δ(s)W
2
(s)
y
G
0
(s)K(s)
u
–
r
Fig. 10.19 Control system with uncertainties
Part B 10.6
188 Part B Automation Theory and Scientific Foundations
R(s)
W
1
(s)Δ
Δ
(s)W
2
(s)
–
Fig. 10.20 Reduced control system with uncertainties
Applying the small gain theorem to the stabil-
ity analysis of the system shown in Fig.10.20,the
condition
W
2
(iω)R(iω)W
1
(iω)(iω)
∞
< 1
guarantees closed-loop stability. As
W
2
(iω)R(iω)W
1
(iω)(iω)
∞
≤
W
2
(iω)R(iω)W
1
(iω)
∞
∞
and
(iω)
∞
≤1 ,
thus the stability condition reduces to
W
2
(iω)R(iω)W
1
(iω)
∞
< 1 .
To support the closed-loop design procedure for
robust stability introduce the γ -norm W
2
(iω)R(iω)
W
1
(iω) (iω)
∞
=γ<1. Finding K(s) such that the
γ -norm is kept at its minimum the maximally stable
robust controller can be constructed.
The performance of a closed-loop system can be
rather conservative in case of having structural infor-
mation on the uncertainties. To avoid this drawback in
the design procedure the so-called structural singular
value is used instead of the H
∞
norm (being equal to the
maximum of thesingular value). The structuredsingular
value of a matrix M is defined as
μ
Δ
(M)=
min(k|det(I−kMΔ) =0
for structured Δ,
σ(Δ) ≤1)
−1
,
where Δ has a block-diagonal form of Δ = diag(...
Δ
i
...)andσ (Δ) ≤1. This definition suggests the fol-
lowing interpretation: a large value of μ
Δ
(M) indicates
that even a small perturbation can make the I−MΔ
matrix singular. On the other hand a small value of
μ
Δ
(M) represents favorable conditions in this sense.
The structured singular value can be considered as the
generalization of the maximal singular value [10.6,13].
Using the notion of the structured singular value the
condition for robust stability (RS) can be formulated
as follows. Robust stability of the closed-loop system
is guaranteed if the maximum of the structured singu-
lar value of W
2
(iω)R(iω)W
1
(iω) lies within the unity
uncertainty radius
sup
ω
μ
Δ
(W
2
(iω)R(iω)W
1
(iω)) < 1 .
Designing robust control systems is a far more in-
volved task than testing robust stability. The design
procedure minimizing the supremum of the structured
singular value is called structured singular value syn-
thesis or μ-synthesis. At this moment there is no direct
method to synthesize a μ-optimal controller. Related
algorithms to perform the minimization are discussed
in the literature under the term DK-iteration [10.6].
In [10.6] not only a detailed discussion is presented,
but also a MATLAB program is shown to provide bet-
ter understanding of the iterations to improve the robust
performance conditions.
So far therobuststability issuehas been discussed in
this section. It has been shown that the closed-loop sys-
tem remains stable, i. e., it is robustly stable, if stability
is guaranteed for all possible uncertainties. In a simi-
lar way, the notion of robust performance (RP)istobe
worked out. The closed-loopsystem exhibits robust per-
formance if the performance measures are kept within
a prescribed limit even for all possible uncertainties,
including the worst case, as well. Design considera-
tions for the robust performance have been illustrated
in Fig.10.18.
As the system performance is represented by the
signal z, robust performance analysis is based on inves-
tigating the relation between the external input signal w
and the performance output z
z = F[G(s), K(s), Δ(s)]w .
Defining a performance measure on the transfer func-
tion matrix F[G(s), K(s), Δ(s)] by
J[F(G, K, Δ)]
the performance of the transfer function from the ex-
ogenous inputs w and to outputs z can be calculated.
The maximum of the performance – even in the worst
case possibly delivered by the uncertainties – can be
evaluated by
sup
Δ
{J[F(G, K, Δ)]:Δ
∞
< 1}.
Based on this value the robust performance of the sys-
tem can be judged. If the robust performance analysis is
to be performed in H
∞
sense, the measure to be applied
is
J
∞
=F[G(iω), K(iω), Δ(iω)]
∞
.
In this case the prespecified performance can be normal-
ized and the limit can be selected as 1. So equivalently,
the robust performance requirement can be formulated
Part B 10.6
Control Theory for Automation – Advanced Techniques 10.7 General Optimal Control Theory 189
Δ
Δ
(s)
Δ
Δ
p
(s)
K(s)
z
y
Δ
y
u
Δ
u
w
P(s)
Fig. 10.21 Design for robust performance traced back to
robust stability
as
F[G(iω), K(iω), Δ(iω)]
∞
< 1 ,
∀Δ(iω)
∞
≤1 .
Robust performance analysis can formally be traced
back to robust stability analysis. In this case a fictitious
Δ
p
uncertainty block representing the nominal perfor-
mance requirements should be inserted across w and z
(Fig.10.21). Then introducing the
Δ
p
0
0 Δ
matrix of the uncertainties gives a pleasant way to trace
back the robust performance problem to the robust sta-
bility problem.
If robust performance synthesis is used the per-
formance measure must be minimized. In this case
μ-optimal design problem can be solved as an extended
robust stability design problem.
10.7 General Optimal Control Theory
In the previous sections design techniques have been
presented to control linear or linearized plants. Min-
imization of L
2
, H
2
or H
∞
loss functions all resulted in
linear control strategies. In practice, however, both the
processes and the control actions are mostly nonlinear,
e.g., controlinputs are typically constrained or saturated
in various technologies, and time-optimal control needs
to alter the control input instantaneously.
To cover a wider class of control problems the con-
trol tasks minimizing loss functions can be formulated
in a more general framework [10.25–31]. Restricted to
deterministic problems consider the following process
to be controlled
˙
x(t) = f(x(t), u(t), t) , 0 ≤t ≤ T ,
x(0): given ,
where x(t) denotes the state variables available for state
feedback, and u(t) is the control input. The control per-
formance is expressed via the loss function constructed
by penalizing terms V
T
and V
J = V
T
(x(T), T)+
T
0
V[x(t), u(t), t]dt .
Designing an optimal controller is equivalent to mini-
mize the above loss function.
Denote by J
∗
(x(t), t) the optimal value of the loss
function while the system is governed from an initial
state x(0) to a final state x(T). The principle of dynamic
programming [10.32] determines the optimal control
law by
min
u∈U
V[x(t), u(t), t]+
∂J
∗
[x(t), t]
∂x
f[x(t), u(t), t]
=−
∂J
∗
[x(t), t]
∂t
,
where the optimal loss function satisfies
J
∗
[x(T), T]=V
T
[x(T), T].
The equation of the optimal control law is called the
Hamilton–Jacobi–Bellman (HJB) equation in the con-
trol literature.
Note that the L
2
and H
2
optimal control policiesdis-
cussed earlier can be regarded as the special case of the
dynamic programming, where the process is linear and
the loss function is quadratic, and moreover the control
horizon is infinitely large and the control input is not
restricted. Thus the linear system
˙
x(t) =Ax(t)+Bu(t)
with the loss function
J =
1
2
∞
0
x
Q
x
x+u
R
u
u
dt
requires the optimal control via state-variable feedback
u(t) =−R
−1
u
B
Px(t) ,
Part B 10.7
190 Part B Automation Theory and Scientific Foundations
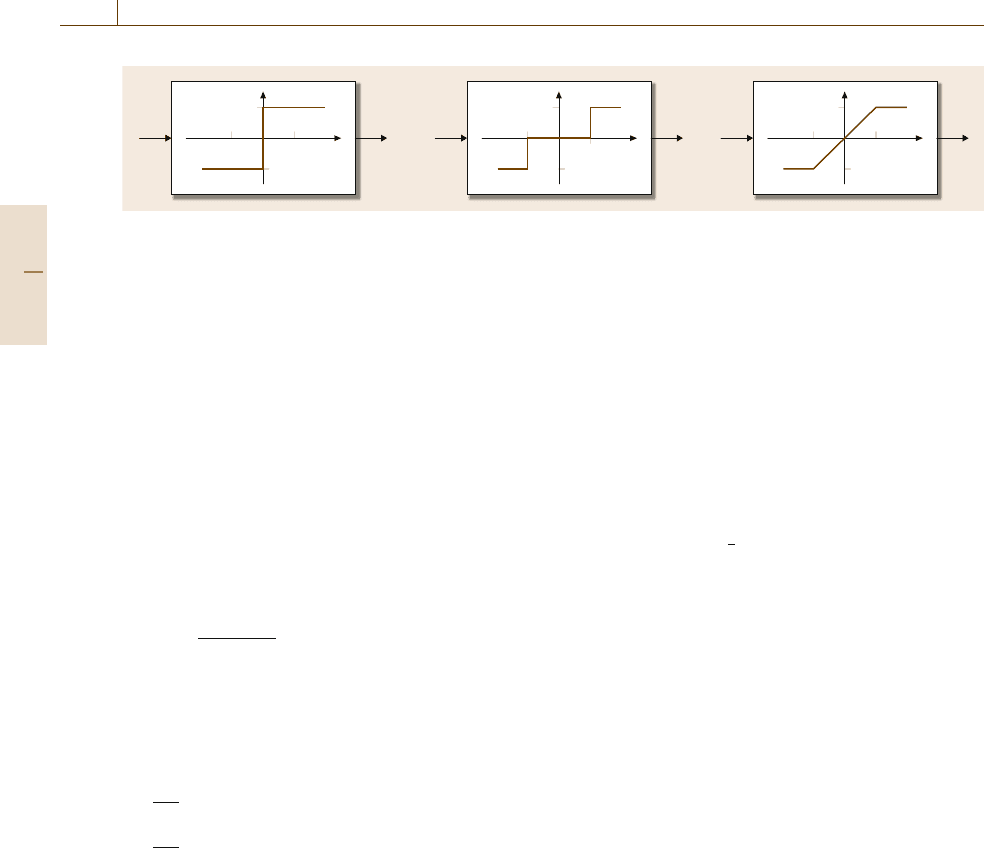
1
–1
–1
1
1
–1
–1
1
1
–1
–1
1
Fig. 10.22 Relay, relay with dead zone, and saturation function to be applied for each vector entry
where Q
x
≥0 and R
u
> 0, and finally the P matrix is
derived as the solution of the following algebraic Ric-
cati equation
A
P+PA −PBR
−1
u
B
P+Q
x
=0 .
At this point it is important to restate the importance
of stabilizability and detectability conditions. Without
satisfying these conditions, an optimizing controller
merely optimizes the cost functionand maynot stabilize
the closed-loop system. In particular, for the LQR prob-
lem just discussed, it is important to state that {A, B} is
stabilizable and {A, Q
1/2
x
} is detectable.
The HJB equation can be reformulated. To do so,
introduce the auxiliary variable λ(t) along the optimal
trajectory by
λ(t)=
∂J[x(t), t]
∂x
.
Apply λ(t) to define the following Hamiltonian function
H(x, u, t)=V(x, u, t)+λ
f(x, u, t) .
Then according to the Pontryagin minimum principle
∂H
∂λ
=
˙
x(t) ,
∂H
∂x
=−
˙
λ(t) ,
as well as
u
∗
(t) =argmin
u∈U
H
hold. (Note that if the control input is not restricted then
the last equation can be written as ∂H/∂u =0.)
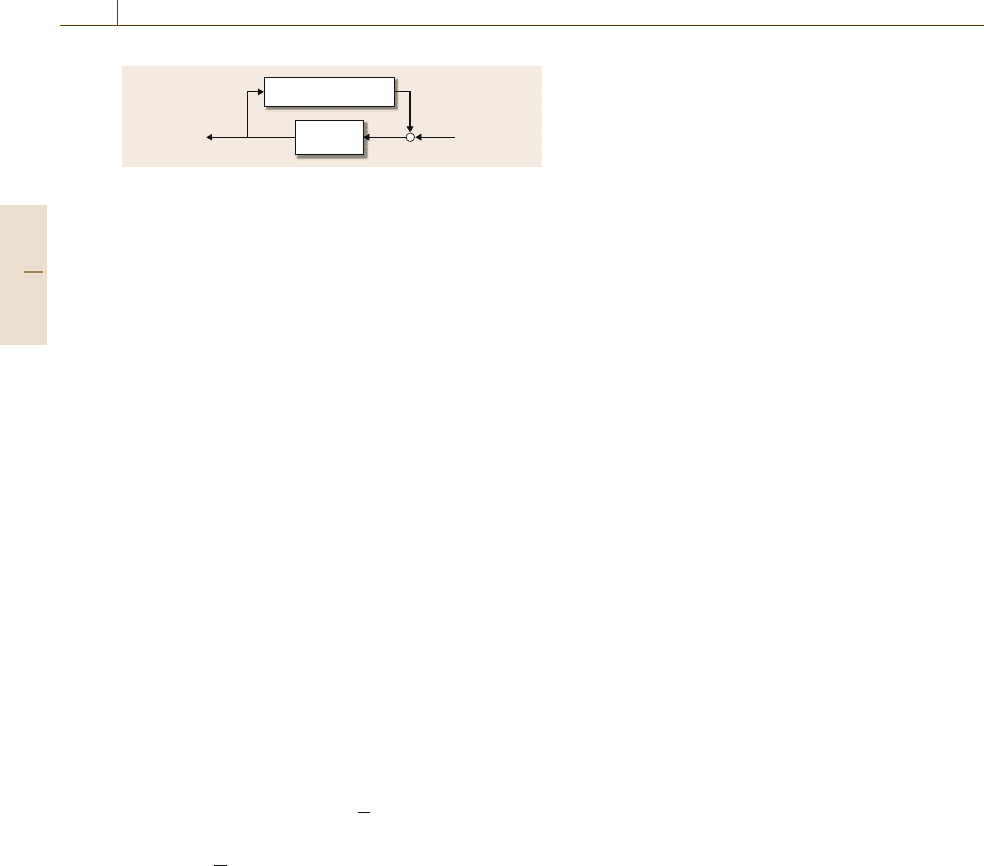
Applying the minimum principle for time-invariant
linear dynamic systems with constrainedinput (|u
i
|≤1,
i =1...n
u
), various loss functions will lead to special
optimal control laws. Having the Hamiltonian function
in a general form of
H(x, u) =V(x, u)+λ
(Ax+Bu) ,
various optimal control strategies can be formulated by
assigning suitable V(x(t), t) loss functions:
•
If the goal is to achieve minimal transfer time, then
assign V(x, u) =1.
•
If the goal is to minimize fuel consumption, then
assign V(x, u) =u
sign(u).
•
If the goal is to minimize energy consumption, then
assign V(x, u) =
1
2
u
u.
Then the application of the minimum principle provides
closed forms for the optimal control, namely:
•
Minimal transfer time requires u
0
(t) =−sign(B
λ)
(relay control)
•
Minimal fuel consumption requires u
0
(t) =−sgzm
(B
λ) (relay with dead zone)
•
Minimal energy consumption requires u
0
(t) =
−sat(B
λ) (saturation).
These examples clarify that even for linear systems the
optimal control policies can be (and typically are) non-
linear. The nonlinear relations participating in the above
control laws are shown in Fig.10.22.
Dynamic programming is a general concept allow-
ing the exact mathematical handling of various control
strategies. Apart from the simplest cases, however, the
optimal control law needs demanding computer-aided
calculations. In the next section a special class of op-
timal controllers will be considered. These controllers
are called predictive controllers and they require re-
stricted calculation complexity, however, result in good
performance.
Part B 10.7
Control Theory for Automation – Advanced Techniques 10.8 Model-Based Predictive Control 191
10.8 Model-Based Predictive Control
As we have seen so far most control system design
methods assume a mathematical model of the process
to be controlled. Given a process model and knowl-
edge on the external system inputs the process output
can be predicted to some extent. To characterize the
behavior of the closed-loop system a combined loss
function can be constructed from the values of the pre-
dicted process outputs and that of the associated control
inputs. Control strategies minimizing this loss function
are called model-based predictive control (MPC). Re-
lated algorithms using special loss functions can be
interpreted as an LQ (linear quadratic) problem with
finite horizon. The performance of well-tuned predic-
tive control algorithms is outstanding for processes
with dead time. Specific model-based predictive control
algorithms are also known as dynamic matrix con-
trol (DMC), generalized predictive control (GPC), and
receding horizon control (RHC) [10.33–41]. Due to
the nature of the model-based control algorithms the
discrete-time (sampled-data) version of the control al-
gorithms will be discussed in the sequel. Also, most of
the detailed discussion is reduced for SISO systems in
this section.
The fundamental idea of predictive control can
be demonstrated through the DMC algorithm [10.40],
where the process output sample y(k+1) is predicted
by using all the available process input samples up to
the discrete time instant k (k = 0, 1, 2 ...) via a linear
function func
ˆ
y(k +1) =func[u(k), u(k−1), u(k −2),
u(k −3),...] .
Repeating the above one-step-ahead prediction for fur-
ther time instants as
ˆ
y(k +2) =func[u(k+1)
, u(k), u(k−1),
u(k −2),...] ,
ˆ
y(k +3) =func[u(k+2), u(k+1), u(k),
u(k −1),...] ,
.
.
.
requires the knowledge of future control actions u(k +
1), u(k+2), u(k+3),..., as well. Introduce the free re-
sponse involving the future values of the process input
obtained provided no change occurs in the control input
at time k
y
∗
(k+1) =func[u(k) =u(k −1), u(k−1),
u(k −2), u(k−3),...] ,
y
∗
(k+2) =func[u(k +1) =u(k−1), u(k) =
u(k −1), u(k−1), u(k−2),...] ,
y
∗
(k+3) =func[u(k +2) =u(k−1), u(k+1) =
u(k −1), u(k) =u(k −1), u(k−1),...] ,
.
.
.
Using the free response just introduced above the pre-
dicted process outputs can be expressed by
ˆ
y(k +1) =s
1
Δu(k)+y
∗
(k+1)
ˆ
y(k +2) =s
1
Δu(k +1)+s
2
Δu(k)+y
∗
(k+2)
ˆ
y(k +3) =s
1
Δu(k +2)+s
2
Δu(k +1)+s
3
Δu(k)
+y
∗
(k+3) ,
.
.
.
where
Δu(k +i) =u(k+i)−u(k+i −1) ,
and s
i
denotes the i-th sample of the discrete-time-step
response of the process. Now a more compact form of
Predicted value =Forced response+Free response
is looked for in vector/matrix form
⎛
⎜
⎜
⎜
⎜
⎝
ˆ
y(k +1)
ˆ
y(k +2)
ˆ
y(k +3)
.
.
.
⎞
⎟
⎟
⎟
⎟
⎠
=
⎛
⎜
⎜
⎜
⎜
⎝
s
1
00...
s
2
s
1
0 ...
s
3
s
2
s
1
...
.
.
.
.
.
.
.
.
.
.
.
.
⎞
⎟
⎟
⎟
⎟
⎠
⎛
⎜
⎜
⎜
⎜
⎝
Δu(k)
Δu(k +1)
Δu(k +2)
.
.
.
⎞
⎟
⎟
⎟
⎟
⎠
+
⎛
⎜
⎜
⎜
⎜
⎝
y
∗
(k+1)
y
∗
(k+2)
y
∗
(k+3)
.
.
.
⎞
⎟
⎟
⎟
⎟
⎠
.
Part B 10.8

192 Part B Automation Theory and Scientific Foundations
Apply here the following notations
S =
⎛
⎜
⎜
⎜
⎜
⎝
s
1
00...
s
2
s
1
0 ...
s
3
s
2
s
1
...
.
.
.
.
.
.
.
.
.
.
.
.
⎞
⎟
⎟
⎟
⎟
⎠
,
ˆ
Y =[
ˆ
y(k +1),
ˆ
y(k +2),
ˆ
y(k +3),...]
,
ΔU =[Δu(k), Δu(k+1), Δu(k+2),...]
,
Y
∗
=[y
∗
(k+1), y
∗
(k+2), y
∗
(k+3),...]
.
Utilizing these notations
ˆ
Y = SΔU +Y
∗
holds. Assuming that the reference signal (set point)
y
ref
(k) is available for the future time instants, define
the loss function to be minimized by
N
y
i=1
y
ref
(k+i)−
ˆ
y(k +i)
2
.
If no restriction for the control signal is taken into ac-
count the minimization leads to
ΔU
opt
=S
−1
Y
ref
−Y
∗
,
where Y
ref
has been constructed from the samples of the
future set points.
The receding horizon control concept utilizes only
the very first element of the ΔU
opt
vector according to
Δu(k) =1ΔU
opt
,
where 1 =(1, 0, 0,...). Observe that RHC needs to re-
calculate Y
∗
and to update ΔU
opt
in each step. The
application of the RHC algorithm results in zero steady-
state error; however, it requires considerable control
effort while minimizing the related loss function.
Smoothing in the control input can be achieved:
•
By extending the loss function with another compo-
nent penalizing the control signal or its change
•
By reducing the control horizon as follows
ΔU =[Δu(k), Δu(k+1), Δu(k+2),...,
Δu(k +N
u
−1), 0, 0,...,0]
.
Accordingly, define the loss function by
N
y
i=1
y
ref
(k+i)−
ˆ
y(k +i)
2
+λ
N
u
i=1
[u(k +i)−u(k +i −1)]
2
,
then the control signal becomes
Δu(k) =1(S
S+λI)
−1
S
Y
ref
−Y
∗
,
where
S =
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎜
⎝
s
1
0 ... 00
s
2
s
1
... 00
s
3
s
2
... 00
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
s
N
y
−1
s
N
y
−2
... s
N
y
−N
u
+1
s
N
y
−N
u
s
N
y
s
N
y
−1
... s
N
y
−N
u
+2
s
N
y
−N
u
+1
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
.
All the above relations can easily be modified to cover
the control of processes with known time delay. Simply
replace y(k+1) by y(k+d+1) to consider y(k+d+1)
as the earliest sample of the process output effected by
the control action taken at time k, where d > 0 repre-
sents the discrete time delay.
As the idea of the model-based predictive control
is quite flexible, a number of variants of the above dis-
cussed algorithms exist. The tuning parameters of the
algorithm are the prediction horizon N
y
, the control
horizon N
u
,andtheλ penalizing factor. Predictions re-
lated to disturbances can also be included. Just as an
example, a loss function
ˆ
Y −Y
ref
W
y
ˆ
Y −Y
ref
+U
c
W
u
U
c
can be assigned to incorporate weighting matrices W
u
and W
y
, respectively, and a reduced version of the con-
trol signals can be applied according to
U = T
c
U
c
,
where T
c
is an a priori defined matrix typically con-
taining zeros and ones. Then minimization of the loss
function results in
Δu(k) =1T
c
T
c
S
W
y
ST
c
+W
u
−1
T
c
S
W
y
(Y
ref
−Y
∗
) .
Constraints existing for the control input opena new
class for the control algorithms. In this case a quadratic
programming problem (conditional minimization of
a quadratic loss function to satisfy control constraints
represented by inequalities) should be solved in each
step. In detail, the loss function
ˆ
Y −Y
ref
W
y
ˆ
Y −Y
ref
+U
c
W
u
U
c
is to be minimized again by U
c
, where
ˆ
Y = ST
c
U
c
+Y
∗
Part B 10.8
Control Theory for Automation – Advanced Techniques 10.9 Control of Nonlinear Systems 193
under the constraint
Δu
min
≤Δu( j) ≤Δu
max
or
u
min
≤u( j) ≤u
max
.
The classical DMC approach is based on the sam-
ples of the step response of the process. Obviously, the
process model can also be represented by a unit impulse
response, a state-space model or a transfer function.
Consequently, beyond the controlinput, the process out-
put prediction can utilize the process output, the state
variables or the estimated state variables, as well. Note
that the original DMC is an open-loop design method
in nature, which should be extended by a closed-loop
aspect or be combined with an IMC-compatible con-
cept to utilize the advantages offered by the feedback
concept.
A further remark relates to stochastic process mod-
els. As an example, the generalized predictive control
concept [10.38,39] applies the model
A(q
−1
)y(k) = B(q
−1
)u(k −d)+
C(q
−1
)
Δ
ζ
k
.
where A(q
−1
), B(q
−1
), and C(q
−1
) are polynomials
of the backward shift operator q
−1
,andΔ = 1−q
−1
.
Moreover, ζ
k
is a discrete-time white-noise sequence.
Then the conditional expected value of the loss function
E
ˆ
Y −Y
ref
W
y
(
ˆ
Y −Y
ref
)+U
c
W
u
U
c
|k
is to be minimized by U
c
. Note that model-based pre-
dictive control algorithms can be extended for MIMO
and nonlinear systems.
While LQ design supposing infinite horizon pro-
vides stable performance, predictive control with finite
horizon using receding horizon strategy lacks stability
guarantees. Introduction of terminal penalty in the cost
function including the quadratic deviations of the states
from their final values is one way to ensure stable per-
formance. Other methods leading to stable performance
with detailed stability analysis, as well as proper han-
dling of constraints, are discussed in [10.35, 36, 42],
where mainly sufficient conditions have been derived
for stability.
For real-time applications fast solutions are re-
quired. Effective numerical methods to solve optimiza-
tion problems with reduced computational demand and
suboptimal solutions have been developed [10.33].
MPC with linear constraints and uncertainties can
be formulated as a multiparametric programming prob-
lem, which is a technique to obtain the solution of
an optimization problem as a function of the uncer-
tain parameters (generally the states). For the different
ranges of the states the calculation can be executed of-
fline [10.33,43]. Different predictivecontrol approaches
for robust constrained predictive control of nonlinear
systems are also in the forefront of interest [10.33,
44].
10.9 Control of Nonlinear Systems
In this section results available for linear control sys-
tems will be extended for a special class of nonlinear
systems. For the sake of simplicity only SISO systems
will be considered.
In practice all control systems exhibit nonlinear
behavior to some extent [10.45, 46]. To avoid facing
problems caused by nonlinear effects linear models
around a nominal operating point are considered. In
fact, most systems work in a linear region for small
changes. However, at various operating points the lin-
earized models are different from each other according
to the nonlinear nature. In this section transformation
methods will be discussed making the operation of non-
linear dynamic systems linear over the complete range
of their operation. Clearly, this treatment, even though
the original process to be controlled remains nonlinear,
will allow us to apply all the design techniques de-
veloped for linear systems. As a common feature the
transformation methods developed for a special class
of nonlinear systems all apply state-variable feedback.
In the past decades a special tool, called Lie algebra,
was developed by mathematicians to extend notions
such as controllability or observability for nonlinear
systems [10.45]. The formalism offered by the Lie alge-
bra will not be discussed here; however, considerations
behind the application of this methodology will be
presented.
10.9.1 Feedback Linearization
Define the state vector x ∈ R
n
and the mappings
{f(x), g(x):
R
n
→R
n
} as functions of the state vector.
Then the Lie derivative of g(x)isdefinedby
L
f
g(x)=
∂g(x)
∂x
f(x)
Part B 10.9
194 Part B Automation Theory and Scientific Foundations
and the Lie product of g(x)and f(x)isdefinedby
ad
f
g(x)=
∂g(x)
∂x
f(x)−
∂ f(x)
∂x
g(x)
= L
f
g(x)−
∂g(x)
∂x
f(x) .
Consider now a SISO nonlinear dynamic system
given by
˙
x = f(x)+g(x)u ,
y =h(x) ,
where x = (x
1
, x
2
,...,x
n
)
is the state vector, u
is the input, and y is the output, while f, g,
and h are unknown smooth nonlinear functions with
{f(x), g(x):
R
n
→R
n
}, {h(x): R
n
→R},and f(0) =0.
The above SISO system has relative degree r at a point
x
0
if:
•
L
g
L
k
f
h(x) =0forallx in a neighborhood of x
0
and
for all k < r −1
•
L
g
L
r−1
f
h(x
0
) =0.
It can be shown that the above system equation can
be transformed to a form having identical structure for
the first r entries
˙
z
1
= z
2
,
˙
z
2
= z
3
,
.
.
.
˙
z
r−1
= z
r
,
˙
z
r
=a(z)+b(z)u ,
˙
z
r+1
=q
r+1
(z) ,
.
.
.
˙
z
n
=q
n
(z) ,
and
y = z
1
,
where the last n −r equations are called the zero dy-
namics. The above equation will be referred to later
on as canonical form, where the new state vector is
z = (z
1
, z
2
,...,z
n
)
. Using the Lie derivatives, a(z)
and b(z) can be found by
a(z) = L
g
L
r−1
f
h(x) ,
b(z) = L
r
f
h(x) .
The normal form related to the original system equa-
tions canbe definedby thediffeomorphism T as follows
z
1
= T
1
(x) = y =h(x) ,
z
2
= T
2
(x) =
˙
y =
∂h
∂x
˙
x = L
f
h(x) ,
.
.
.
z
r
= T
r
(x) = y
(r)
=
∂L
r−2
f
h(x)
∂x
˙
x = L
r−1
f
h(x) .
Assuming that
L
g
h(x) =0 ,
L
g
L
f
h(x) =0 ,
.
.
.
L
g
L
r−2
f
h(x) =0 ,
all the remaining
T
r+1
(x),...,T
n
(x)
elements of the transformation matrix can be deter-
mined in a similar way. The geometric conditions for
the existence of such a global normal form have been
studied in [10.45].
Now, concerning the feedback linearization, the fol-
lowing result serves as a starting point for further
analysis: a nonlinearsystem withthe above assumptions
can be locally transformed into a controllable linear
system by state feedback. The transformation of coor-
dinates can be achieved if and only if
rank
g(x
0
), ad
f
g(x
0
),..., ad
n−1
f
g(x
0
)
=n
at a given x
0
point and
g, ad
f
g,..., ad
n−2
f
g
is involutive near x
0
. Introducing
v =
˙
z
r
and using the canonical form it is seen that the feedback
according to u =[v −a(z)]/b(z) results in a linear rela-
tionship between v and y in such a way that v is simply
the r-th derivative of y. In other words the linearizing
feedback establishes a relation from v to y equivalent to
r cascaded integrators. Note that the outputs of the in-
tegrators determine r states, while the remaining (n−r)
states correspond to the zero dynamics.
Part B 10.9