Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Control Theory for Automation – Advanced Techniques 10.1 MIMO Feedback Systems 175
In the figure G(s) denotes the transfer function ma-
trix of the process and K(s) stands for the controller.
For the designer of the closed-loop system, G(s)is
given, while K(s) is the result of the design proce-
dure. Note that G(s) is only a model of the process
and serves here as the basis to design an appropriate
K(s). In practice the signals driving the control sys-
tem are delivered by a given process or technology
and the control input is in fact applied to the given
process.
The main design objectives are [10.2,6,13]:
•
Closed-loop and internal stability (just as it will be
addressed in this section)
•
Good command following (servo property)
•
Good disturbance rejection
•
Good measurement noise attenuation.
In addition, to keep operational costs low, small process
input values are preferred over large excursions in the
control signal. Also, as the controller design is based on
a model of the process, which always implies uncertain-
ties, design procedures aiming at stability and desirable
performance based on the nominal plant model should
be extended to tolerate modeling uncertainties as well.
Thus the list of the design objectives is to be completed
by:
•
Achieve reduced input signals
•
Achieve robust stability
•
Achieve robust performance.
Some of the above design objectives could be conflict-
ing; however, the performance-related issues typically
emerge in separable frequency ranges.
In thissection linear multivariable feedback systems
will be discussed with the following representations.
10.1.1 Transfer Function Models
Consider a linear process with n
u
control inputs ar-
ranged into a u ∈
R
n
u
input vector and n
y
outputs
arranged into a y ∈
R
n
y
output vector. Then the transfer
function matrix contains all possible transfer functions
between any of the inputs and any of the outputs
y(s) =
⎛
⎜
⎜
⎜
⎜
⎝
y
1
(s)
.
.
.
y
n
y
−1
(s)
y
n
y
(s)
⎞
⎟
⎟
⎟
⎟
⎠
=G(s)u(s)
=
⎛
⎜
⎜
⎜
⎜
⎝
G
1,1
(s) G
1,2
(s) ... G
1,n
u
(s)
.
.
.
.
.
.
.
.
.
.
.
.
G
n
y
−1,1
(s) G
n
y
−1,2
(s) ... G
n
y
−1,n
u
(s)
G
n
y
,1
(s) G
n
y
,2
(s) ... G
n
y
,n
u
(s)
⎞
⎟
⎟
⎟
⎟
⎠
⎛
⎜
⎜
⎜
⎜
⎝
u
1
(s)
.
.
.
u
n
u
−1
(s)
u
n
u
(s)
⎞
⎟
⎟
⎟
⎟
⎠
,
where s is the Laplace operator and G
k,l
(s) denotes the
transfer function from the l-th component of the input
u to the k-th component of the output y. The trans-
fer function approach has always been an emphasized
modeling tool for control practice. One of the reasons is
that the G
k,l
(s) transfer functions deliver the magnitude
and phase frequency functions via a formal substitu-
tion of G
k,l
(s)
s=iω
= A
k,l
(ω)e
iφ
k,l
(ω)
. Note that for real
physical processes lim
ω→∞
A
k,l
(ω) =0. The transfer
function matrix G(s) is stable if each of its elements
is a stable transfer function. Also, the transfer function
matrix G(s) will be called proper if each of its elements
is a proper transfer function.
10.1.2 State-Space Models
Introducing n
x
state variables arranged into an x ∈R
n
x
state vector, the state-space model of a MIMO system is
given by the following equations
˙
x(t) =Ax(t)+Bu(t) ,
y(t) =Cx(t)+Du(t) ,
where A ∈
R
n
x
×n
x
, B ∈ R
n
x
×n
u
,C ∈R
n
y
×n
x
,andD ∈
R
n
y
×n
u
are the system parameters [10.14,15].
Important notions (state variable feedback, control-
lability, stabilizability, observability and detectability)
have been introduced to support the deep analysis of
state-space models [10.1,2]. Roughly speaking a state-
space representationis controllable if anarbitrary initial
state can be moved to any desired state by suitable
choice of controlsignals. In terms of state-spacerealiza-
tions, feedback means state variable feedback realized
by a control law of u =−Kx, K ∈
R
n
u
×n
x
. Regarding
controllable systems, state variable feedback can relo-
cate all the poles of the closed-loop system to arbitrary
locations. If a system is not controllable, but the modes
(eigenvalues) attached to the uncontrollable states are
stable, the complete system is still stabilizable. A state-
space realization is said to be observable if the initial
Part B 10.1
176 Part B Automation Theory and Scientific Foundations
state x(0) can be determined from the output function
y(t), 0 ≤t ≤ t
final
. A system is said to be detectable if
the modes (eigenvalues) attached to the unobservable
states are stable.
Using the Laplace transforms in the state-space
model equations the relation between the state-space
model and the transfer function matrix can easily be
derived as
G(s) =C(sI−A)
−1
B+D .
As far as the above relation is concerned the condition
lim
ω→∞
A
k,l
(ω) =0 raised for real physical processes
leads to D =0. Note that the G(s) transfer function con-
tains only the controllable and observable subsystem
represented by the state-space model {A, B, C, D}.
10.1.3 Matrix Fraction Description
Transfer functions can be factorized in several ways. As
matrices, in general, do not commute, the matrix frac-
tion description (MFD) form exists as a result of right
and left factorization, respectively [10.2,6,13]
G(s) =B
R
(s)A
−1
R
(s) =A
−1
L
(s)B
L
(s) ,
where A
R
(s), B
R
(s), A
L
(s), and B
L
(s) are all stable
transfer function matrices. In [10.2]itisshownthat
the right and left MFDs can be related to stabiliz-
able and detectable state-space models, respectively. To
outline the procedureconsider firstthe right matrix frac-
tion description (RMFD) G(s) =B
R
(s)A
−1
R
(s). For the
sake of simplicity the practical case of D = 0 will be
considered. Assuming that {A, B} is stabilizable, ap-
ply a state feedback to stabilize the closed-loop system
using a gain matrix K ∈
R
n
u
×n
x
u(t) =−Kx(t) ,
then the RMFD components can be derived in
a straightforward way as
B
R
(s) =C(sI−A+BK)
−1
B ,
A
R
(s) =I−K(sI−A+BK)
−1
B .
It can be shown that G(s) =B
R
(s)A
−1
R
(s) will not be
a function of the stabilizing gain matrix K,however,
the proof is rather involved [10.2]. Also, following the
above procedure, both B
R
(s)andA
R
(s) will be stable
transfer function matrices.
In a similar way, assuming that {A, C} is detectable,
apply a state observer to detect the closed-loop system
using a gain matrix L. Then the left matrix fraction
description (LMFD) components can be obtained as
B
L
(s) =C(sI−A+LC)
−1
B ,
A
L
(s) =I−C(sI−A+LC)
−1
L ,
being stable transfer function matrices. Again, G(s) =
A
−1
L
(s)B
L
(s) will be independent of L.
Concerning the coprime factorization, an important
relation, the Bezout identity, will be used, which holds
for the components of the RMFD and LMFD coprime
factorization
X
L
(s) Y
L
(s)
−B
L
(s) A
L
(s)
A
R
(s) −Y
R
(s)
B
R
(s) X
R
(s)
=
A
R
(s) −Y
R
(s)
B
R
(s) X
R
(s)
X
L
(s) Y
L
(s)
−B
L
(s) A
L
(s)
=I ,
where
Y
R
(s) =K(sI−A+BK)
−1
L ,
X
R
(s) =I+C(sI−A+BK)
−1
L ,
Y
L
(s) =K(sI−A+LC)
−1
L ,
X
L
(s) =I+K(sI−A+LC)
−1
B .
Note that the Bezout identity plays an important role
in control design. A good review on this can be found
in [10.1]. Also note that a MFD factorization can be
accomplished by using the Smith–McMillan form of
G(s) [10.1]. As a result of this procedure, however,
A
R
(s), B
R
(s), A
L
(s), and B
L
(s) will be polynomial ma-
trices. Moreover, both A
R
(s)andA
L
(s) will be diagonal
matrices.
10.2 All Stabilizing Controllers
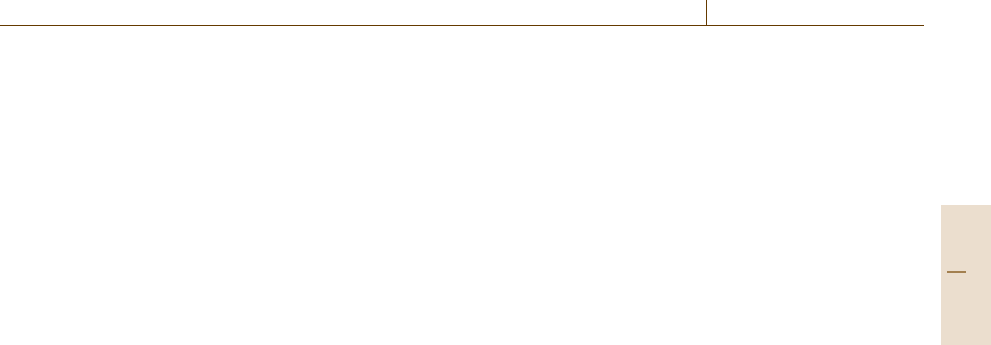
In general, a feedback control system follows the struc-
ture shown in Fig.10.5, where the control configuration
consists of two subsystems. In this general setup any
of the subsystems S
1
(s)orS
2
(s) may play the role of
the process or the controller [10.3]. Here {u
1
, u
2
} and
{y
1
, y
2
} are multivariable external input and output sig-
nals in general sense, respectively. Moreover, S
1
(s)and
S
2
(s) represent transfer function matrices according to
y
1
(s) =S
1
(s)[u
1
(s)+y
2
(s)],
y
2
(s) =S
2
(s)[u
2
(s)+y
1
(s)].
Part B 10.2
Control Theory for Automation – Advanced Techniques 10.2 All Stabilizing Controllers 177
S
1
(s)
u
1
e
1
y
1
S
2
(s)
e
2
u
2
y
2
Fig. 10.5 A general feedback configuration
Being restricted to linear systems the closed-loop
system is internally stable if and only if all the four
entries of the transfer function matrix
H
11
(s) H
12
(s)
H
21
(s) H
22
(s)
are asymptotically stable, where
e
1
(s)
e
2
(s)
=
u
1
(s)+y
2
(s)
u
2
(s)+y
1
(s)
=
H
11
(s) H
12
(s)
H
21
(s) H
22
(s)
u
1
(s)
u
2
(s)
=
[I−S
2
(s)S
1
(s)]
−1
[I−S
2
(s)S
1
(s)]
−1
S
2
(s)
[I−S
1
(s)S
2
(s)]
−1
S
1
(s) [I−S
1
(s)S
2
(s)]
−1
×
u
1
(s)
u
2
(s)
.
Also, from
e
1
(s) =u
1
(s)+y
2
(s) =u
1
(s)+S
2
(s)e
2
(s) ,
e
2
(s) =u
2
(s)+y
1
(s) =u
2
(s)+S
1
(s)e
1
(s) ,
we have
e
1
e
2
=
H
11
(s) H
12
(s)
H
21
(s) H
22
(s)
u
1
(s)
u
2
(s)
=
I −S
2
(s)
−S
1
(s) I
−1
u
1
u
2
,
P(s)
z
yu
w
K(s)
Fig. 10.6 General control system configuration
K(s)W
r
(s)
W
z
1
(s)
z
1
W
z
2
(s)
z
2
r
–
G(s)
W
d
(s)
d
G
d
(s)
u
y
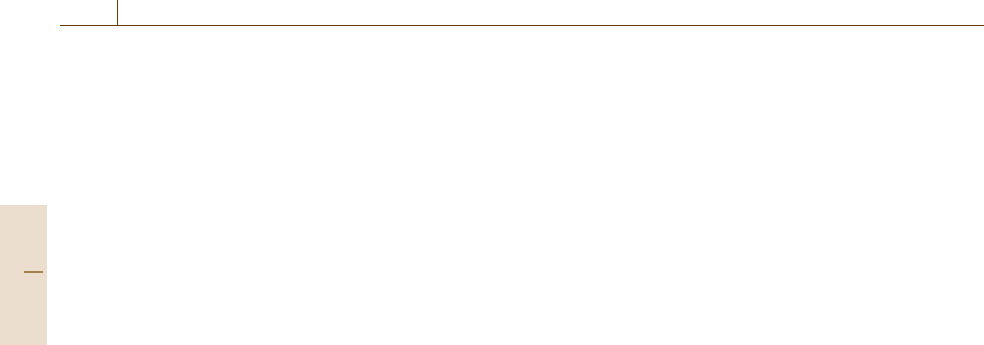
Fig. 10.7 A sample closed-loop control system
so for internal stability we need the transfer function
matrix
[I−S
2
(s)S
1
(s)]
−1
[I−S
2
(s)S
1
(s)]
−1
S
2
(s)
[I−S
1
(s)S
2
(s)]
−1
S
1
(s) [I−S
1
(s)S
2
(s)]
−1
=
I −S
2
(s)
−S
1
(s) I
−1
to be asymptotically stable [10.13].
In the control system literature a more practical, but
still general closed-loop control scheme is considered,
as shown in Fig.10.6 with a generalized plant P(s)and
controller K(s) [10.6,13,14]. In this configuration uand
y represent the process input and output, respectively, w
denotes external inputs (command signal, disturbance
or noise), z is a set of signals representing the closed-
loop performance in general sense. The controller K(s)
is to be adjusted to ensure a stable closed-loop system
with appropriate performance.
As an example Fig.10.7 shows a possible control
loop for tracking and disturbance rejection. Once the
disturbance signal d and the command signal (or set
point) signal r are combined to a vector-valuedsignal w,
the block diagram can easily be redrawn to match the
general scheme in Fig.10.6. Note the W
d
(s), W
r
(s),
and W
z
(s) filters introduced just to shape the system
performance. Since any closed-loop system can be re-
drawn to the general configuration shown in Fig.10.5,
G(s)
d
1
uy
K(s)
e
–
r
Fig. 10.8 Control system configuration including set point
and input disturbance
Part B 10.2
178 Part B Automation Theory and Scientific Foundations
the block diagram in Fig. 10.8 will be considered in the
sequel.
Adopting the condition earlier developed for inter-
nal stability with S
1
(s) =G(s)andS
2
(s) =−K(s)it
is seen that now we need asymptotic stability for the
following four transfer functions
[I+K(s)G(s)]
−1
[I+K(s)G(s)]
−1
K(s)
−[I+G(s)K(s)]
−1
G(s) [I+G(s)K(s)]
−1
.
At the same time the block diagram of Fig. 10.8
suggests
e(s) =r(s)−y(s) =r(s)−G(s)K(s)e(s)
⇒e(s) =[I+G(s)K(s)]
−1
r(s) ,
whichleadsto
u(s) =K(s)e(s) =K(s)[I+G(s)K(s)]
−1
r(s)
=Q(s)r(s) ,
where
Q(s) =K(s)[I+G(s)K(s)]
−1
.
It can easily be shown that, in the case of a stable
G(s) plant, any stable Q(s) transfer function, in other
words Q parameter, results in internal stability. Rear-
ranging the above equation K(s) parameterized by Q(s)
exhibits all stabilizing controllers
K(s) =[I−Q(s)G(s)]
−1
Q(s) .
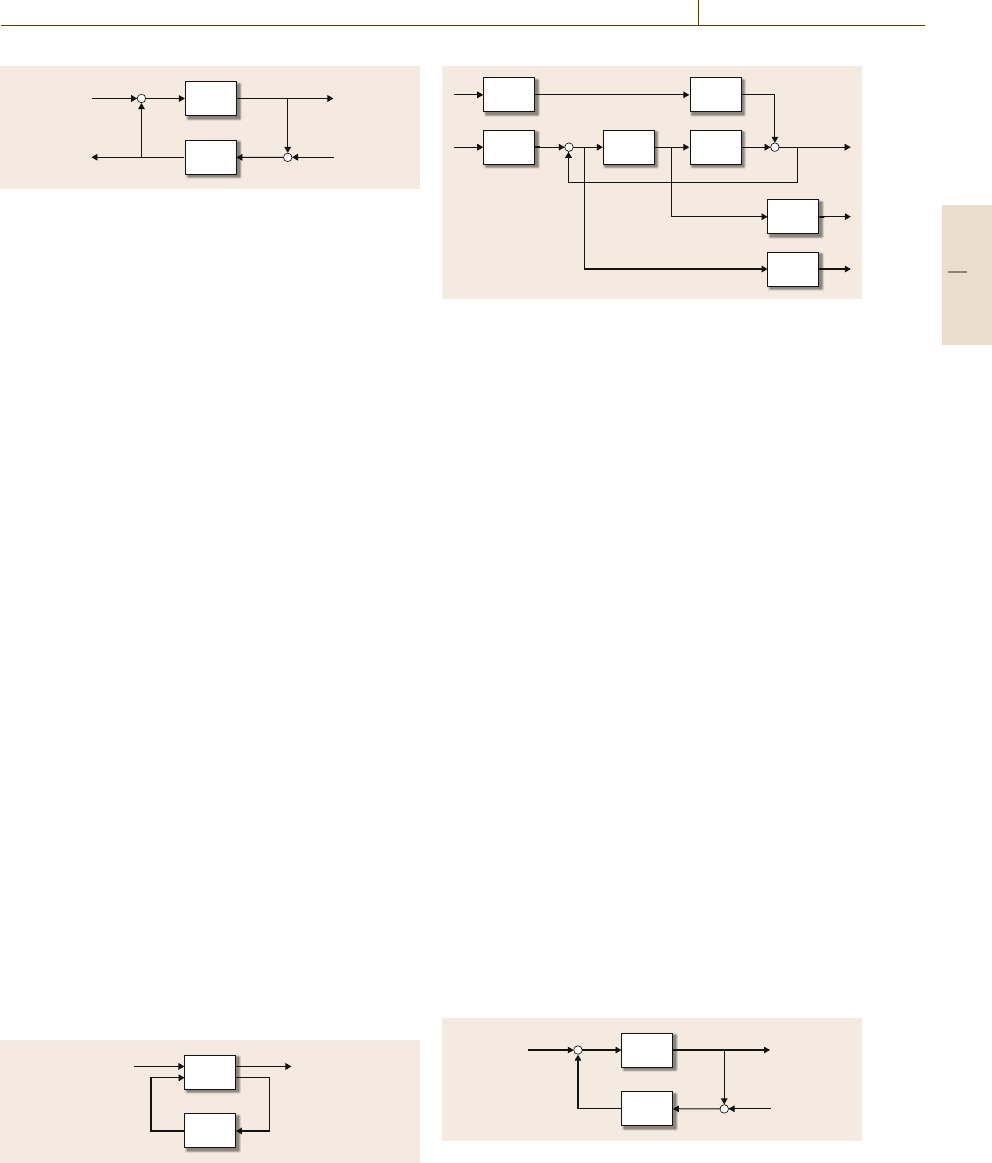
This result is known as the Youla parameteriza-
tion [10.13, 16]. Recalling u(s) = Q(s)r(s)andy(s) =
G(s)u(s) =G(s)Q(s)r(s) allows one to draw the block
diagram of the closed-loop system explicitly using Q(s)
(Fig.10.9). The control scheme shown in Fig.10.9 satis-
fies u(s) =Q(s)r(s)andy(s) =G(s)Q(s)r(s), moreover
the process modeling uncertainties (G(s) of the phys-
ical process and G(s) of the model, as part of the
controller are different) are also taken into account.
This is the well-known internal model controller (IMC)
scheme [10.17,18].
Q(s)
r
–
–
Model
Controller
Plant
G(s)
G(s)
u
y
Fig. 10.9 Internal model controller
A quick evaluation for the Youla parameterization
should point out a fundamental difference between de-
signing an overall transfer function T(s) from the r(s)
reference signal to the y(s) output signal using a nonlin-
ear parameterization by K(s)
y(s) =T(s)r(s) =G(s)K(s)[I+G(s)K(s)]
−1
r(s)
versus a design by
y(s) =T(s)r(s) =G(s)Q(s)r(s)
linear in Q(s).
Further analysis of the relation by y(s) =T(s)r(s) =
G(s)Q(s)r(s) indicates that Q(s) =G
−1
(s) is a reason-
able choice to achieve an ideal servo controller to ensure
y(s) =r(s). However, to intend to set Q(s) =G
−1
(s)is
not a practical goal for several reasons [10.2]:
•
Non-minimum-phase processes would exhibit un-
stable Q(s) controllers and closed-loop systems
•
Problems concerning the realization of G
−1
(s) are
immediately seen regarding processes with positive
relative degree or time delay
•
The ideal servo property would destroy the distur-
bance rejection capability of the closed-loop system
•
Q(s) =G
−1
(s) would lead to large control effort
•
Effects of errors in modeling the real process by
G(s) need further analysis.
Replacing the exact inverse G
−1
(s) by an approximated
inverse is in harmony with practical demands.
To discuss the concept of handling processes with
time delay consider single-input single-output (SISO)
systems and assume that
G(s) = G
p
(s)e
−sT
d
,
where G
p
(s) = B(s)/A(s) is a proper transfer function
with no time delay and T
d
> 0 is the time delay. Recog-
nizing that the time delaycharacteristics isnot invertible
y(s) = T
p
(s)e
−sT
d
r(s) =G
p
(s)Q(s)e
−sT
d
r(s)
can be assigned as the overall transfer function to
be achieved. Updating Fig.10.9 for G(s) = B(s)/
A(s)e
−sT
d
,Fig.10.10 illustrates the control scheme.
A key point is here, however, that the parameteriza-
tion by Q(s) should consider only G
p
(s) to achieve
G
p
(s)Q(s) specified by the designer. Note that, in the
model shown in Fig.10.10, uncertainties in G
p
(s)andin
the time delay should both be taken into account when
studying the closed-loop system.
Part B 10.2
Control Theory for Automation – Advanced Techniques 10.2 All Stabilizing Controllers 179
Q(s)
r
–
–
Model
Controller
Plant
B(s)
A(s)
e
–sT
d
u
y
B(s)
A(s)
e
–sT
d
Fig. 10.10 IMC control of a plant with time delay
K(s)
r
––
–
Model
Controller
Plant
B(s)
A(s)
e
–sT
d
u
y
B(s)
A(s)
e
–sT
d
Fig. 10.11 Controller using Smith predictor
The control scheme in Fig.10.10 has been im-
mediately derived by applying the Youla param-
eterization concept for processes with time delay.
The idea, however, of letting the time delay ap-
pear in the overall transfer function and restricting
the design procedure to a process with no time
delay is more than 50years old and comes from
Smith [10.19].
The fundamental concept of the design procedure
called the Smith predictor is to set up a closed-loop sys-
tem to control the output signal predicted ahead by the
time delay. Then, to meet the causality requirement, the
predicted output is delayed toderive thereal systemout-
put. All these conceptional steps can be summarized in
a control scheme; just redraw Fig.10.10 to Fig. 10.11
G(s)
Q(s)
Y
L
0
(s)
A
L
(s)B
L
(s)
X
L
0
–1
(s)
u
r
–
Plant
y
–
G(s)
Q(s)
Y
R
0
(s)
B
R
(s)A
R
(s)
X
R
0
–1
(s)
u
r
–
Plant
y
–
Fig. 10.12 Two different realizations of all stabilizing controllers for unstable processes
with
Q(s) = K(s)[I +G
p
(s)K(s)]
−1
.
The fact that the output of the internal loop can be
considered as the predicted value of the process output
explains the name of the controller. Note that the Smith
predictor is applicable for unstable processes as well.
In the case of unstable plants, stabilization of the
closed-loop system needs a more involved discussion.
In order to separate the unstable (in a more general
sense, the undesired) poles both the plant and the con-
troller transfer function matrices will be factorized to
(right or left) coprime transfer functions
G(s) =B
R
(s)A
−1
R
(s) =A
−1
L
(s)B
L
(s) ,
K(s) =Y
R
(s)X
−1
R
(s) =X
−1
L
(s)Y
L
(s) ,
where B
R
(s), A
R
(s), B
L
(s), A
L
(s), Y
R
(s), X
R
(s), Y
L
(s),
and X
L
(s) are all stable coprime transfer functions. Sta-
bility implies that B
R
(s) should contain all the right half
plane (RHP)-zeros of G(s), and A
R
(s) should contain
as RHP-zeros all the RHP-poles of G(s). Similar state-
ments are valid for the left coprime pairs. As far as the
internal stability analysis is concerned, assuming that
G(s) is strictly proper and K(s) is proper, the coprime
factorization offers the stability analysis via checking
the stability of
A
R
(s) −Y
R
(s)
B
R
(s) X
R
(s)
−1
and
X
L
(s) Y
L
(s)
−B
L
(s) A
L
(s)
−1
,
respectively. According to the Bezout identity [10.6,
13, 20] there exist X
L
(s)andY
L
(s) as stable transfer
function matrices satisfying
X
L
(s)A
R
(s)+Y
L
(s)B
R
(s) =I .
Part B 10.2

180 Part B Automation Theory and Scientific Foundations
G(s)
K(sI–A+LC)
–1
L
C(sI–A+LC)
–1
L
K(sI–A+LC)
–1
B
C(sI–A+LC)
–1
B
uy
–
–
–
Q(s)
Plant
r
Fig. 10.13 State-space realization of all stabilizing controllers de-
rived from LMFD components
G(s)
C(sI–A+BK)
–1
L
C(sI–A+BK)
–1
B
K(sI–A+BK)
–1
L
K(sI–A+BK)
–1
B
uy
–
–
–
Q(s)
Plant
r
Fig. 10.14 State-space realization of all stabilizing controllers de-
rived from RMFD components
G(s)
Q(s)
L
A
∫...dt
K
–
–
CB
uy
–
–
Plant
r
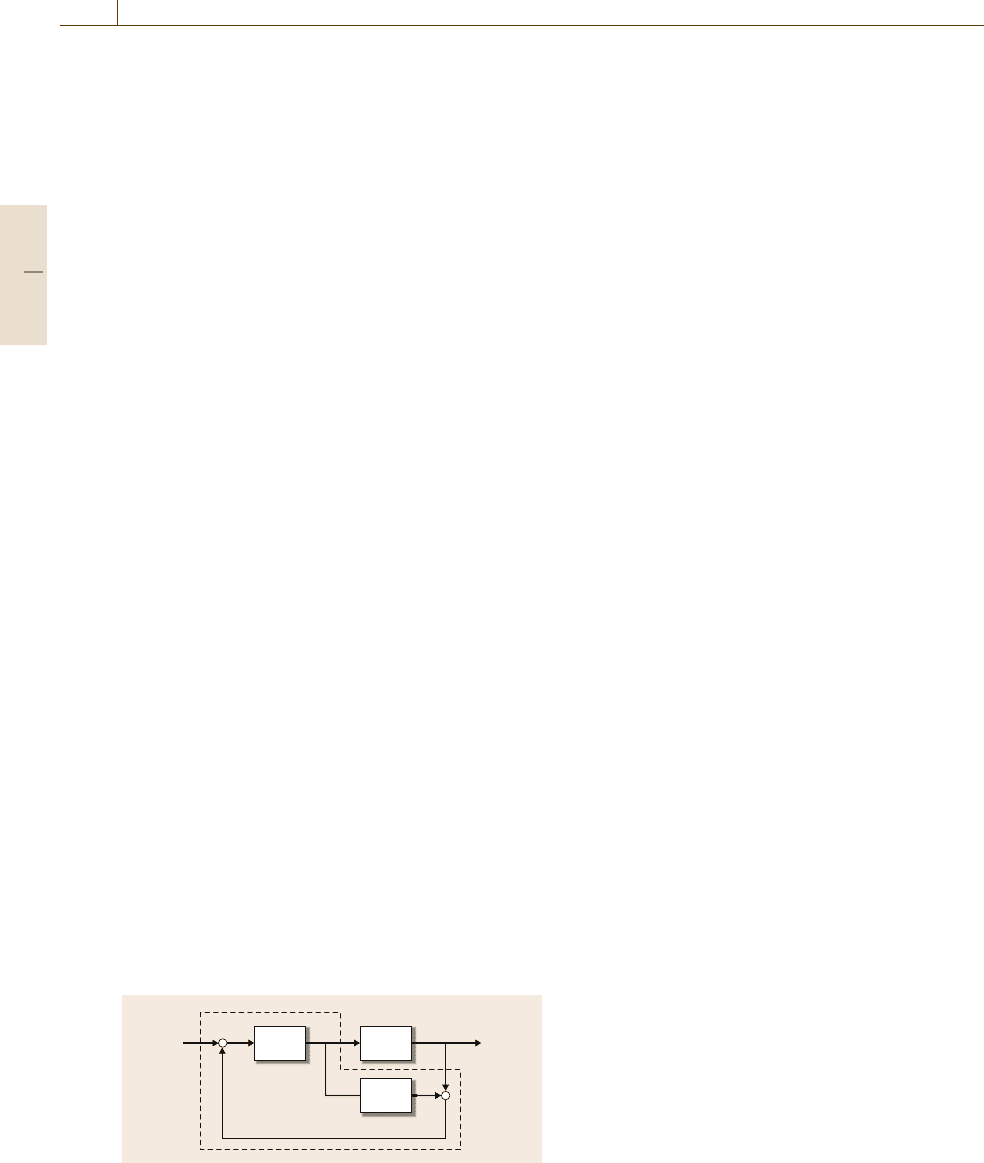
Fig. 10.15 State-space realization of all stabilizing controllers
In a similar way, a left coprime pair of transfer func-
tion matrices X
R
(s)andY
R
(s) can be found by
B
L
(s)Y
R
(s)+A
L
(s)X
R
(s) =I .
P(s)
Q(s)
z
yu
w
J(s)
Fig. 10.16 General control system using Youla
parameterization
The stabilizing K(s) =Y
R
(s)X
−1
R
(s) =X
−1
L
(s)Y
L
(s)
controllers can be parameterized as follows. Assume
that the Bezout identity results in a given stabilizing
controller K =Y
0
R
(s)X
0
R
−1
(s) =X
0
L
−1
(s)Y
0
L
(s), then
X
R
(s) =X
0
R
(s)−B
R
(s)Q(s) ,
Y
R
(s) =Y
0
R
(s)+A
R
(s)Q(s) ,
X
L
(s) =X
0
L
(s)−Q(s)B
L
(s) ,
Y
L
(s) =Y
0
L
(s)+Q(s)A
L
(s) ,
delivers all stabilizing controllers parameterized by any
stable proper Q(s) transfer function matrix with appro-
priate size.
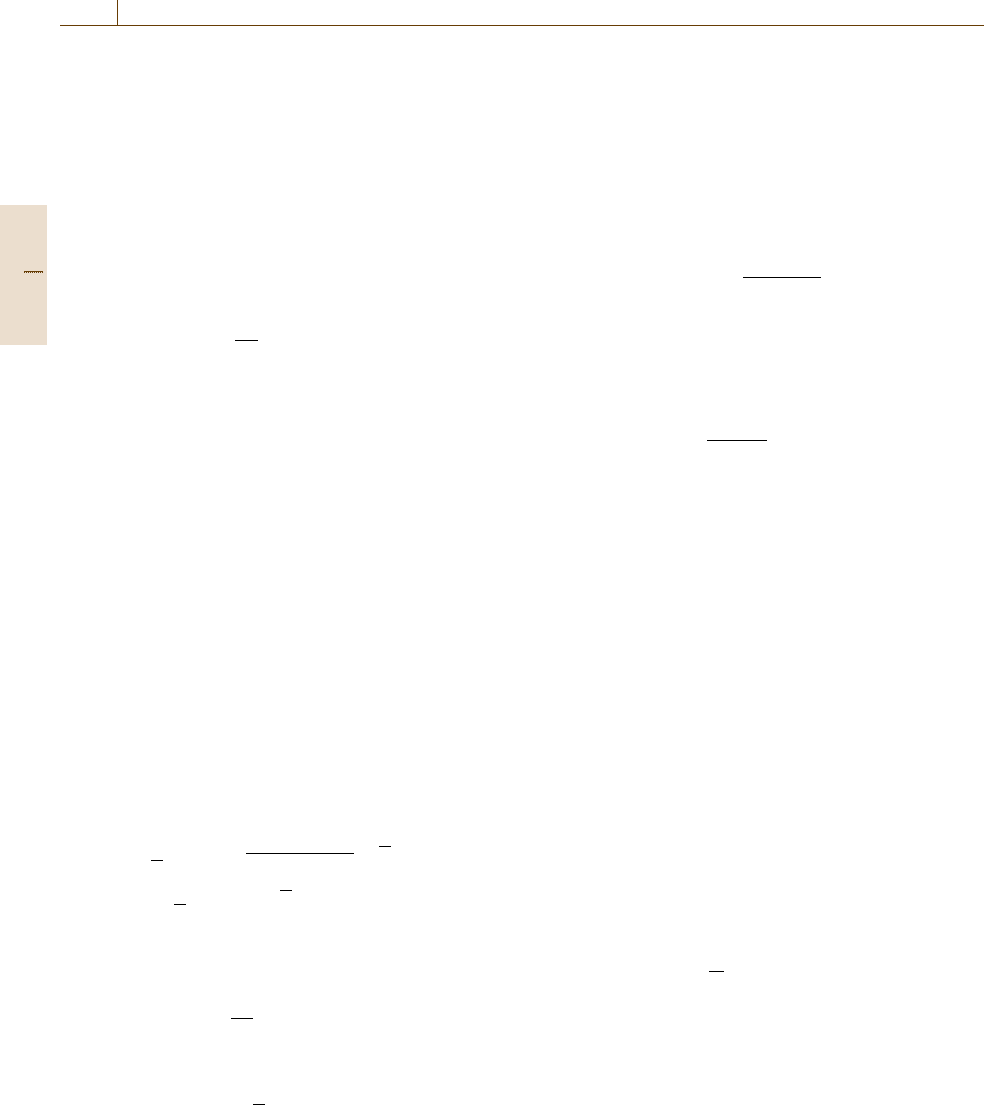
Though the algebra of the controller design proce-
dure may seem rather involved, in terms of block dia-
grams itcan be interpreted in severalways. In Fig.10.12
two possible realizations are shown to support the
reader in comparing the results obtained for unstable
processes with those shown earlier in Fig.10.9 to con-
trol stable processes.
Another obvious interpretationof the generaldesign
procedure can also be read out from the realizations
of Fig. 10.12. Namely, the immediate loops around
G(s) along Y
0
L
(s)andX
0
L
−1
(s) or along X
0
R
−1
(s)and
Y
0
R
(s), respectively, stabilize the unstable plant, then
Q(s) serves the parameterization in a similar way as
originally introduced for stable processes.
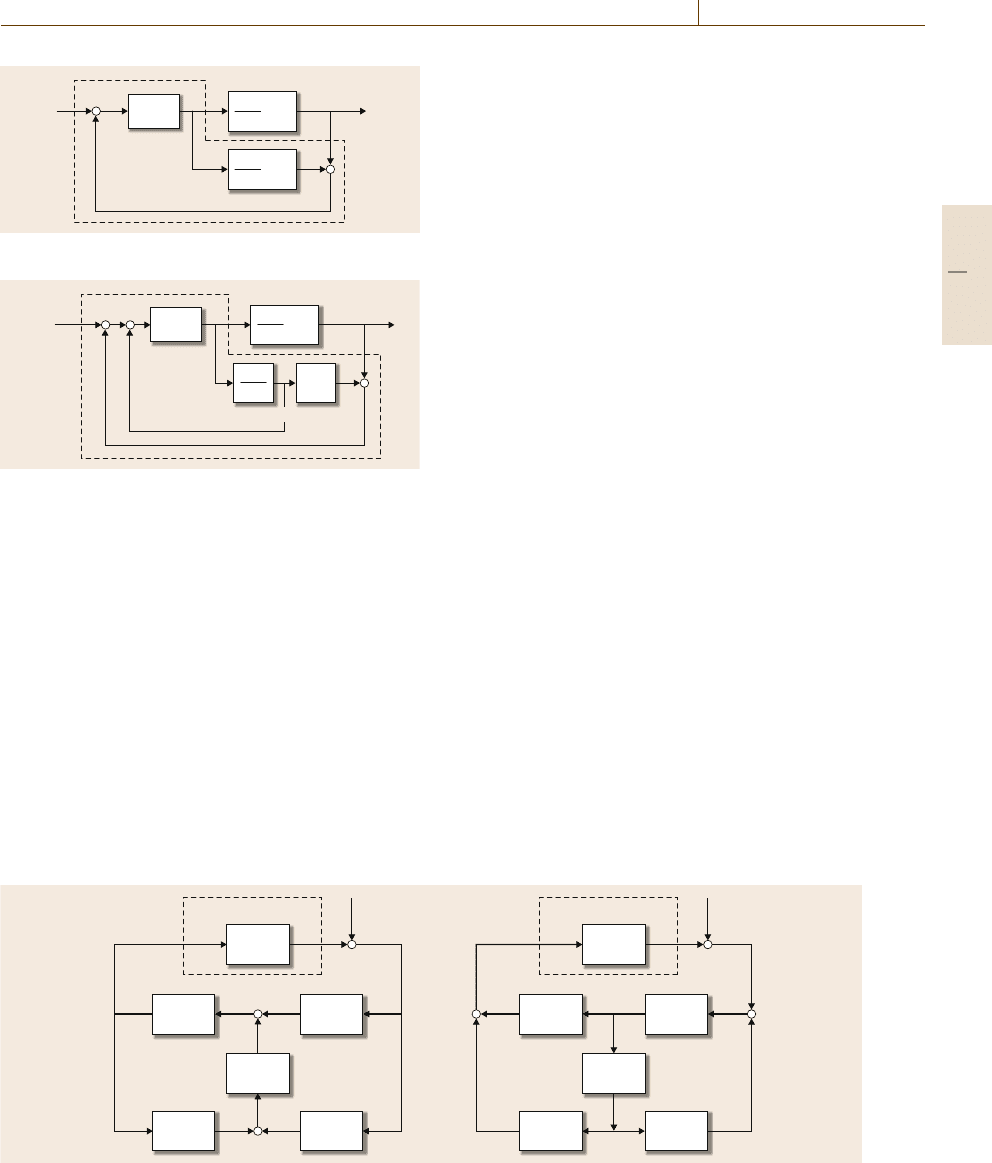
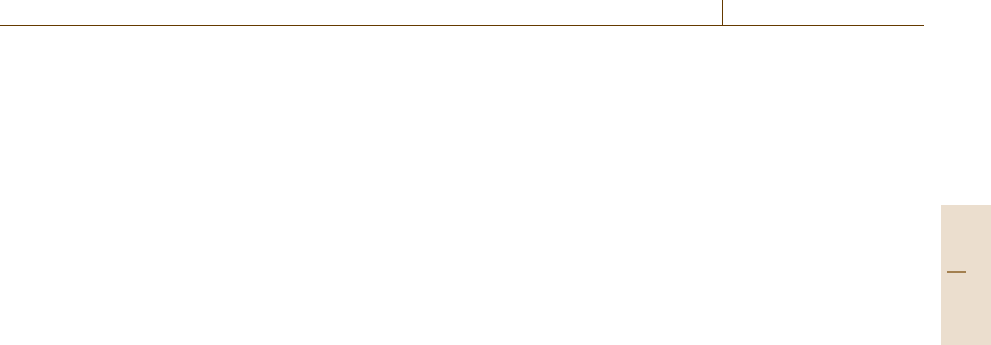
Having the general control structure developed us-
ing LMFD or RMFD components (Fig. 10.12 gives
the complete review), respectively, we are in the po-
sition to show how the control of the state-space
model introduced earlier in Sect. 10.1 can be param-
eterized with Q(s). To visualize this capability recall
K(s) =X
−1
L
(s)Y
0
L
(s)and
B
L
(s) =C(sI−A+LC)
−1
B ,
A
L
(s) =I−C(sI−A+LC)
−1
L ,
Part B 10.2
Control Theory for Automation – Advanced Techniques 10.3 Control Performances 181
and apply these relations in the control scheme
of Fig.10.12 using LMFD components.
Similarly, recall K(s) =Y
0
R
(s)X
0
R
−1
(s)and
B
R
(s) =C(sI−A+BK)
−1
B ,
A
R
(s) =I−K(sI−A+BK)
−1
B ,
and apply these relations in the control scheme
of Fig.10.12 using RMFD components.
To complete the discussion on the various interpre-
tations of the all stabilizing controllers, observe that
the control schemes in Figs. 10.13 and 10.14 both use
4×n state variables to realize the controller dynamics
beyondQ(s). As Fig. 10.15 illustrates, equivalent reduc-
tion of the block diagrams of Figs. 10.13 and 10.14,
respectively, both lead to the realization of the all sta-
bilizing controllers. Observe that the application of the
LMFD and RMFD components lead to identical control
scheme.
In addition, any of the realizations shown in
Figs. 10.12–10.15 can directly be redrawn to form the
general control system scheme most frequently used
in the literature to summarize the structure of the
Youla parameterization. This general control scheme is
showninFig.10.16. In fact, the state-space realization
by Fig.10.15 follows the general control scheme shown
in Fig.10.16, assuming z = 0 and w =r. The transfer
function J(s) itself is realized by the state estimator
and state feedback using the gain matrices L and K,as
shownin Fig.10.15. Note that Fig. 10.16 can also be de-
rived from Fig.10.6 by interpreting J(s) as a controller
stabilizing P(s), thusallowingone toapply an additional
all stabilizing Q(s) controller.
10.3 Control Performances
So far we have derived various closed-loop structures
and parameterizations attached to them only to ensure
internal stability. Stability, however, is not the only is-
sue for the control system designer. To achieve goals
in terms of the closed-loop performance needs further
considerations [10.2,6,13,17]. Just to see an example:
in control design it is a widely posed requirement to
ensure zero steady-state error while compensating step-
like changes in the command or disturbance signals.
The practical solution suggests one to insert an inte-
grator into the loop. The same goal can be achieved
while using the Youla parameterization, as well. To il-
lustrate this action SISO systems will be considered.
Apply stable Q
1
(s)andQ
2
(s) transfer functions to form
Q(s) =sQ
1
(s)+Q
2
(s) .
Then Fig.10.9 suggests the transfer function between r
and r −y to be
1−Q(s)G(s) .
To ensure
1−[Q(s)G(s)]
s=0
=0
we need
Q
2
(s)(0) =[G(0)]
−1
.
Alternatively, using state models the selection accord-
ing to
Q(0) =1/[C(−A+BK+LC)
−1
B]
will insert an integrator to the loop.
Several criteria exist to describe the required per-
formances for the closed-loop performance. To be able
to design closed-loop systems with various perfor-
mance specifications, appropriate norms for the signals
and systems involved should be introduced [10.13,
17].
10.3.1 Signal Norms
One possibility to characterize the closed-loop perfor-
mance is to integrate various functions derived from the
error signal. Assume that a generalized error signal z(t)
has been constructed. Then
z(t)
v
=
∞
0
|z|
v
dt
1/v
defines the L
v
norm of z(t) with v as a positive integer.
The relatively easy calculations required for the
evaluations made the L
2
norm the most widely used cri-
terion in control. A further advantage of the quadratic
function is that energy represented by a given signal
can also be taken into account in this way in many
cases. Moreover, applying the Parseval’s theoremthe L
2
Part B 10.3
182 Part B Automation Theory and Scientific Foundations
norm can be evaluated using the signal described in the
frequency domain. Namely having z(s) as the Laplace
transform of z(t)
z(s) =
∞
0
z(t)e
−st
dt
the Parseval’s theorem offers the following closed form
to calculate the L
2
norm as
z(t)
2
=z(s)
s=iω
2
=z(iω)
2
=
1
2π
∞
−∞
|z(iω)|
2
dω
1/2
.
Another important selection for v takes v →∞,which
results in
z(t)
∞
=sup
t
|z(t)|
and is interpreted as the largest or worst-case error.
10.3.2 System Norms
Frequency functions are extremely useful tools to an-
alyze and design SISO closed-loop control systems.
MIMO systems, however, exhibit an input-dependent,
variable gain at a given frequency. Consider a MIMO
system given by a transfer function matrix G(s)and
driven by an input signal w and delivering an output sig-
nal z. The norm z(iω)=G(iω)w(iω) of the system
output z depends on both the magnitude and direction
of the input vector w(iω), where ... denotes Eu-
clidean norm. The associated norms are therefore called
induced norms. Bounds for z(iω) are given by
σ
(G(iω)) ≤
G(iω)w(iω)
w(iω)
≤
σ(G(iω)) ,
where σ
(G(iω)) and σ(G(iω)) denote the minimum and
maximum values of the singular values of G(iω), re-
spectively. The most frequently used system norms are
the H
2
and H
∞
norms defined as follows
G
2
=
1
2π
∞
−∞
trace[G
(−iω)G(iω)]dω
1/2
and
G
∞
=sup
ω
σ(G(iω)) .
It is clear that the system norms – as induced norms
– can be expressed by using signal norms. Introducing
g(t) as the unit impulse response of G(s) the Parseval’s
theorem suggests expressing the H
2
system norm by the
L
2
signal norm
G
2
2
=
∞
0
trace[g
(t)g(t)]dt .
Further on, the H
∞
norm can also be expressed as
G
∞
=sup
ω
max
w
G(iω)w
w
where w =0
and w ∈
C
n
w
,
where w denotes a complex-valued vector. For a dy-
namic system the above expression leads to
G
∞
=sup
w
z(t)
2
w(t)
2
where w(t)
2
=0
,
if G(s) is stable and proper. The above expression
means that the H
∞
norm can be expressed by L
2
signal
norm.
Assume a linear system given by a state model
{A, B, C} and calculate its H
2
and H
∞
norms. Trans-
forming the state model to a transfer function matrix
G(s) =C(sI−A)
−1
B
the H
2
norm is obtained by
G
2
2
=trace(CP
0
C
) =trace(B
P
c
B) ,
where P
c
and P
0
are delivered by the solution of the
Lyapunov equations
AP
0
+P
0
A
+BB
=0 ,
P
c
A+A
P
c
+C
C =0 .
The calculation of the H
∞
norm can be performed via
an iterative procedure, where in each step an H
2
norm
is to be minimized. Assuming a stable system, construct
the Hamiltonian matrix
H =
A
1
γ
2
BB
−C
C −A
.
For large γ the matrix H has n
x
eigenvalues with neg-
ative real part and n
x
eigenvalues with positive real
part. As γ decreases these eigenvalues eventually hit the
imaginary axis. Thus
G
∞
= inf
γ>0
(γ ∈ R: H hasnoeigenvalues
with zero real part) .
Part B 10.3
Control Theory for Automation – Advanced Techniques 10.4 H
2
Optimal Control 183
Note that each step within the γ -iteration procedure
is after all equivalent to solve an underlying Riccati
equation. The solution of the Riccati equation will be
detailed later on in Sect.10.4.
So far stability issues have been discussed and sig-
nal and system norms, as performance measures, have
been introduced to evaluate the overall operation of
the closed-loop system. In the sequel the focus will
be turned on design procedures resulting in both stable
operation and expected performance. Controller design
techniques to achieve appropriate performance mea-
sures via optimization procedures related to the H
2
and H
∞
norms will be discussed, respectively [10.6,
21].
10.4 H
2
Optimal Control
To start the discussion consider the general control sys-
tem configuration shown in Fig.10.6 describe the plant
by the transfer function
z
y
=
G
11
G
12
G
21
G
22
w
u
or equivalently, by a state model
⎛
⎜
⎝
˙
x
z
y
⎞
⎟
⎠
=
⎛
⎜
⎝
AB
1
B
2
C
1
0D
12
C
2
D
21
0
⎞
⎟
⎠
⎛
⎜
⎝
x
w
u
⎞
⎟
⎠
.
Assume that (A, B
1
) is controllable, (A, B
2
) is stabiliz-
able, (C
1
, A) is observable, and (C
2
, A) is detectable.
For the sake of simplicity nonsingular D
12
D
12
and
D
21
D
21
matrices, as well as D
12
C
1
=0 and D
21
B
1
=0
will be considered.
Using a feedback via K(s)
u =−K(s)y ,
the closed-loop system becomes
z = F[G(s), K(s)]w ,
where
F[G(s), K(s)]=G
11
(s)−G
12
(s)[I+K(s)G
22
(s)]
−1
K(s)G
21
(s) .
Aiming at designing optimal control in H
2
sense the
J
2
=F(G(iω), K(iω))
2
2
norm is to be minimized by
a realizable K(s). Note that this control policy can be
interpreted as a special case of the linear quadratic
(LQ) control problem formulation. To show this rela-
tion assume aweighting matrix Q
x
assigned for thestate
variables and a weighting matrix R
u
assigned for the
input variables. Choosing
C
1
=
Q
1/2
x
0
and D
12
=
0
R
1/2
u
and
z = C
1
x+D
12
u
as an auxiliary variable the well-known LQ loss func-
tion can be reproduced with
Q
x
=
Q
1/2
x
Q
1/2
x
and R
u
=
R
1/2
u
R
1/2
u
.
Up to this point the feedback loop has been set up and
the design problem has been formulated to find K(s)
minimizing J
2
=F(G(iω), K(iω))
2
2
. Note that the op-
timal controller will be derived as a solution of the
state-feedback problem. The optimization procedure is
discussed below.
10.4.1 State-Feedback Problem
If all the state variables are available then the state vari-
able feedback
u(t) =−K
2
x(t)
is used with the gain
K
2
=(D
12
D
12
)
−1
B
2
P
c
,
where P
c
represents the positive-definite or positive-
semidefinite solution of the
A
P
c
+P
c
A−P
c
B
2
D
12
D
12
−1
B
2
P
c
+C
1
C
1
=0
Riccati equation. According to this control law the
A−B
2
K
2
matrix will determine the closed-loop stability.
As far as the solution of the Riccati equation is
concerned, an augmented problem setup can turn this
task to an equivalent eigenvalue–eigenvector decompo-
sition (EVD). In details, the EVD decomposition of the
Hamiltonian matrix
H =
A −B
2
D
12
D
12
−1
B
2
−C
1
C
1
−A
Part B 10.4
184 Part B Automation Theory and Scientific Foundations
will separate the eigenvectors belonging to stable and
unstable eigenvalues, then the positive-definite P
c
ma-
trix can be calculated from the eigenvectors belonging
to the stable eigenvalues. Denote the diagonal ma-
trix containing the stable eigenvalues and collect the
associated eigenvectors to a block matrix
F
G
,
i.e.,
H
F
G
=
F
G
.
Then it can be shown that the solution of the Riccati
equation is obtained by
P
c
=GF
−1
.
At the same time it should be noted that there exist
further, numerically advanced procedures to find P
c
.
10.4.2 State-Estimation Problem
The optimal state estimation (state reconstruction) is
the dual of the optimal control task [10.1, 4]. The esti-
mated states are derived as the solution of the following
differential equation:
˙
ˆ
x(t) =A
ˆ
x(t)+B
2
u(t)+L
2
[y(t)−C
2
ˆ
x(t)],
where
L
2
=P
0
C
2
(D
21
D
21
)
−1
and the P
0
matrix is the positive-definite or positive-
semidefinite solution of the Riccati equation
P
0
A
+AP
0
−P
0
C
2
D
21
D
21
−1
C
2
P
0
+B
1
B
1
=0 .
Note that the
A−P
0
C
2
D
21
D
21
−1
C
2
matrix characterizing the closed-loop system is stable,
i.e., all its eigenvalues are on the left-hand half plane.
Remark 1: Putting the problem justdiscussed so far into
a stochastic environment the above state es-
timation is also called a Kalman filter.
Remark 2: The gains L
2
∈ R
n
x
×n
y
and K
2
∈ R
n
u
×n
x
have been introduced and applied in earlier
stages in this chapter to create the LMFD
and RMFD descriptions, respectively. Here
their optimal values have been derived in H
2
sense.
B
A
∫ dt
–
CL
x
ˆ
y
ˆ
u
y
C
A
∫ dt
–
KB
a)
b)
ux
y
u
r
Fig. 10.17 Duality of state control and state estimation
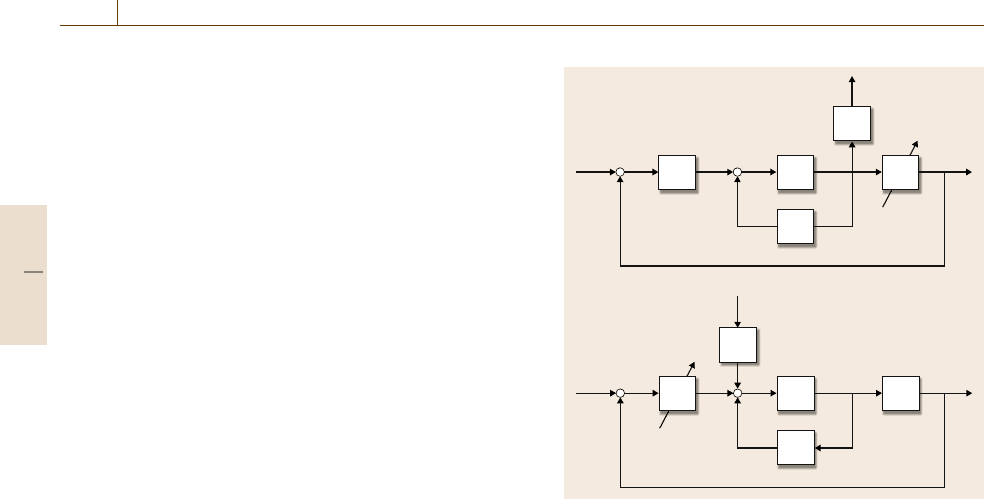
Remark 3: State control and state estimation exhibit
dual properties and share some common
structural features. Comparing Fig.10.17a
and b it is seen that the structure of the state
feedback control and that of the full order
observer resemble each other to a large ex-
tent. The output signal, as well as the L
and C matrices in the observer, play iden-
tical role as the control signal, as do the B
and K matrices in state feedback control.
Parameters in the matrices L and K are to
be freely adjusted for the observer and for
the state feedback control, respectively. In
a sense, calculating the controller and ob-
server feedback gain matrices represent dual
problems. In this case duality means that
any of the structures shown in Fig. 10.17a,b
can be turned to its dual form by revers-
ing the direction of the signal propagation,
interchanging the input and output signals
(u ↔ y), and transforming the summation
points to signal nodes and vice versa.
10.4.3 Output-Feedback Problem
If the state variables are not available for feedback the
optimal control law utilizes the reconstructed states. In
case of designing optimal control in H
2
sense the con-
trol law u(t) =−K
2
x(t) is replaced by u(t) =−K
2
ˆ
x(t).
Part B 10.4