Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Control Theory for Automation: Fundamentals 9.6 Feedback Stabilization of Nonlinear Systems 165
To this end, in fact, it suffices to assume that
the equilibrium z = 0of
˙
z = f (z, ξ) is stabiliz-
able by means of a virtual law ξ = v
(z), and
that b
1
(z,ξ
1
), b
2
(z,ξ
1
,ξ
2
),...,b
r
(z,ξ
1
,ξ
2
,...,ξ
r
) are
nowhere zero.
9.6.2 Semiglobal Stabilization
via Pure State Feedback
The global stabilizationresults presented in the previous
section are indeed conceptually appealing but the actual
implementation of the feedback law requiresthe explicit
knowledge of a Lyapunov function V(z) for the system
˙
z = f(z, 0) (or for the system
˙
z = f(z,v
∗
(z)) in the case
of Lemma 9.6). This function, in fact, explicitly deter-
mines the structure of the feedback law which globally
asymptotically stabilizes the system. Moreover, in the
caseofsystemsoftheform(9.49) with r > 1, the com-
putation of the feedback law is somewhat cumbersome,
in that it requires to iterate a certain number of times
the manipulations described in the proof of Lemmas 9.5
and 9.6. In this section we show how these drawbacks
can be overcome, in a certain sense, if a less ambitious
design goal is pursued, namely if instead of seeking
global stabilization one is interested in a feedback law
capable of asymptotically steering to the equilibrium
point alltrajectories which haveorigin in a apriori fixed
(and hence possibly large) bounded set.
Consider again a system satisfying the assumptions
of Lemma 9.5. Observe that b(z, ξ), being continu-
ous and nowhere zero, has a well-defined sign. Choose
a simple control law of the form
u =−k sign(b)ξ
(9.50)
to obtain the system
˙
z = f (z, ξ) ,
˙
ξ =q(z, ξ)−k|b(z, ξ)|ξ .
(9.51)
Assume that the equilibrium z = 0of
˙
z = f (z, 0) is
globally asymptotically but also locally exponentially
stable. If this is the case, then the linear approximation
of the first equation of (9.51) at the point (z, ξ) =(0, 0)
is a system of the form
˙
z = Fz+Gξ ,
in which F is a Hurwitz matrix. Moreover, the linear
approximation of the second equation of (9.51)atthe
point (z, ξ) =(0, 0) is a system of the form
˙
ξ =Qz+Rξ −kb
0
ξ ,
in which b
0
=|b(0, 0)|. It follows that the linear
approximation of system (9.51) at the equilibrium
(z, ξ) =(0, 0) is a linear system
˙
x =Ax in which
A =
FG
Q (R−kb
0
)
.
Standard arguments show that, if the number k is large
enough, the matrix in question has all eigenvalues
with negative real part (in particular, as k increases, n
eigenvalues approach the n eigenvalues of F and the
remaining one is a real eigenvalue that tends to −∞).
It is therefore concluded, from the principle of stabil-
ity in the first approximation, that if k is sufficiently
large the equilibrium (z, ξ) =(0, 0) of the closed-loop
system (9.51) is locally asymptotically (actually locally
exponentially) stable.
However, a stronger result holds. It can be proven
that, for any arbitrary compact subset K of
R
n
×R, there
exists a number k
∗
, such that, for all k ≥k
∗
, the equilib-
rium (z, ξ) =(0, 0) of the closed-loop system (9.51)is
locally asymptotically stable and all initial conditions in
K produce a trajectory that asymptotically converges to
this equilibrium. In other words, the basin of attraction
of the equilibrium (z, ξ) =(0, 0) of the closed-loop sys-
tem containsthe set K. Note thatthe numberk
∗
depends
on the choice of the set K and, in principle, it increases
as the size of K increases. The property in question
can be summarized as follows (see [9.10, Chap. 9] for
further details). A system
˙
x = f(x, u)
is said tobe semigloballystabilizable (anequivalent,but
longer, terminology is asymptotically stabilizable with
guaranteed basin of attraction) at a given point
¯
x if, for
each compact subset K ⊂
R
n
, there exists a feedback
law u =u(x), which in general depends on K, such that
in the corresponding closed-loop system
˙
x = f(x, u(x))
the point x =
¯
x is a locally asymptotically stable equi-
librium, and
x(0) ∈ K ⇒ lim
t→∞
x(t) =
¯
x
(i.e., the compact subset K is contained in the
basin of attraction of the equilibrium x =
¯
x). The re-
sult described above shows that system (9.46), under
the said assumptions, is semiglobally stabilizable at
(z, ξ) =(0, 0), by means of a feedback law of the form
(9.50).
The arguments just shown can be iterated to
deal with a system of the form (9.49). In fact,
it is easy to realize that, if the equilibrium z = 0
of
˙
z = f (z, 0) is globally asymptotically and also
Part B 9.6

166 Part B Automation Theory and Scientific Foundations
locally exponentially stable, if q
i
(z,ξ
1
,ξ
2
,...,ξ
i
)
vanishes at (z,ξ
1
,ξ
2
,...,ξ
i
) = (0, 0, 0,...,0) and
b
i
(z,ξ
1
,ξ
2
,...,ξ
i
) is nowhere zero, forall i =1,...,r,
system (9.49) is semiglobally stabilizable at the point
(z,ξ
1
,ξ
2
,...,ξ
r
) =(0, 0, 0,...,0), actually by means
of a control law that has the following structure
u =α
1
ξ
1
+α
2
ξ
2
+···+α
r
ξ
r
.
The coefficients α
1
,...,α
r
that characterize this con-
trol law can be determined by means of recursive
iteration of the arguments described above.
9.6.3 Semiglobal Stabilization
via Dynamic Output Feedback
System (9.49) can be semiglobally stabilized, at the
equilibrium (z,ξ
1
,...,ξ
r
) =(0, 0,...,0), by means of
a simple feedback law, which is a linear function of
the partial state (ξ
1
,...,ξ
r
). If these variables are not
directly available for feedback, one may wish to use in-
stead an estimate – as is possible in the case of linear
systems – provided by a dynamical system driven by
the measured output. This is actually doable if the out-
put y of (9.49) coincides with the state variable ξ
1
.For
the purpose of stabilizing system (9.49) by means of
dynamic output feedback, it is convenient to reexpress
the equations describing this system in a simpler form,
known as normal form.Setη
1
=ξ
1
and define
η
2
=q
1
(z,ξ
1
)+b
1
(z,ξ
1
)ξ
2
,
by means of which the second equation of (9.49)is
changed into
˙
η
1
=η
2
.Setnow
η
3
=
∂(q
1
+b
1
ξ
2
)
∂z
f(z,ξ
1
)
+
∂(q
1
+b
1
ξ
2
)
∂ξ
1
[q
1
+b
1
ξ
2
]+b
1
[q
2
+b
2
ξ
3
],
by means of which the third equation of (9.49)is
changed into
˙
η
2
=η
3
. Proceeding in this way, it is easy
to conclude that the system (9.49) can be changed into
a system modeled by
˙
z = f (z,η
1
) ,
˙
η
1
=η
2
,
˙
η
2
=η
3
,
···
˙
η
r
=q(z,η
1
,η
2
,...,η
r
)+b(z,η
1
,η
2
,...,η
r
)u ,
y =η
1
, (9.52)
in which q(0, 0, 0,...,0) =(0, 0, 0,...,0) and b(z,η
1
,
η
2
,...,η
r
) is nowhere zero.
It has been shown earlier that, if the equilibrium
z = 0of
˙
z = f (z, 0) is globally asymptotically and also
locally exponentially stable, this system is semiglobally
stabilizable, by means of a feedback law
u =h
1
η
1
+h
2
η
2
+...+h
r
η
r
, (9.53)
which is a linear function of the states η
1
,η
2
,...,η
r
.
The feedback in question, if the coefficients are ap-
propriately chosen, is able to steer at the equilibrium
(z,η
1
,...,η
r
) =(0, 0,...,0) all trajectories with ini-
tial conditions in a given compact set K (whose size
influences, as stressed earlier, the actual choice of the
parameters h
1
,...,h
r
). Note that, since all such trajec-
tories willneverexit, in positivetime, a(possibly larger)
compact set, there exists a number L such that
|h
1
η
1
(t)+h
2
η
2
(t)+...+h
r
η
r
(t)|≤L ,
for all t ≥0 whenever the initial condition of the closed
loop is in K. Thus, to theextent of achieving asymptotic
stability witha basin ofattraction including K, the feed-
back law (9.53)could be replaced with a (nonlinear) law
of the form
u =σ
L
(h
1
η
1
+h
2
η
2
+...+h
r
η
r
) , (9.54)
in which σ (r)isanybounded function that coincides
with r when |r|≤L. The advantage of having a feed-
back law whose amplitude is guaranteed not to exceed
a fixed bound is that, when the partial states η
i
will be
replaced by approximate estimates, possiblylarge errors
in the estimates will not cause dangerously large control
efforts.
Inspection of the equations (9.52) reveals that the
state variables used in the control law (9.54) coincide
with the measured output y and its derivatives with re-
spect to time, namely
η
i
=y
(i−1)
, i = 1, 2,...,r .
It is therefore reasonable to expect that these variables
could be asymptotically estimated in some simple way
by meansof a dynamical system drivenby the measured
output itself. The system in question is actually of the
form
˙
˜
η
1
=
˜
η
2
−κc
r−1
( y−
˜
η
1
) ,
˙
˜
η
2
=
˜
η
3
−κ
2
c
r−2
( y−
˜
η
1
) ,
···
˙
˜
η
r
=−κ
r
c
0
( y−
˜
η
1
) . (9.55)
It is easy to realize that, if
˜
η
1
(t) = y(t), then all
˜
η
i
(t),
for i = 2,...,r, coincide with η
i
(t). However, there is
Part B 9.6
Control Theory for Automation: Fundamentals 9.6 Feedback Stabilization of Nonlinear Systems 167
no a priori guarantee that thiscan be achieved and hence
system (9.55) cannot be regarded as a true observer of
the partial state η
1
,...,η
r
of (9.52). It happens, though,
that if the reason why this partial state needs to be es-
timated is only the implementation of the feedback law
(9.54), then an approximate observer such as (9.55) can
be successfully used.
The fact is that, if the coefficients c
0
,...,c
r−1
are
coefficients of a Hurwitz polynomial
p(λ) =λ
r
+c
r−1
λ
r−1
+...+c
1
λ +c
0
,
and if the parameter κ is sufficiently large, the rough
estimates
˜
η
i
of η
i
provided by (9.55) can be used to re-
place the true states η
i
in the control law (9.54). This
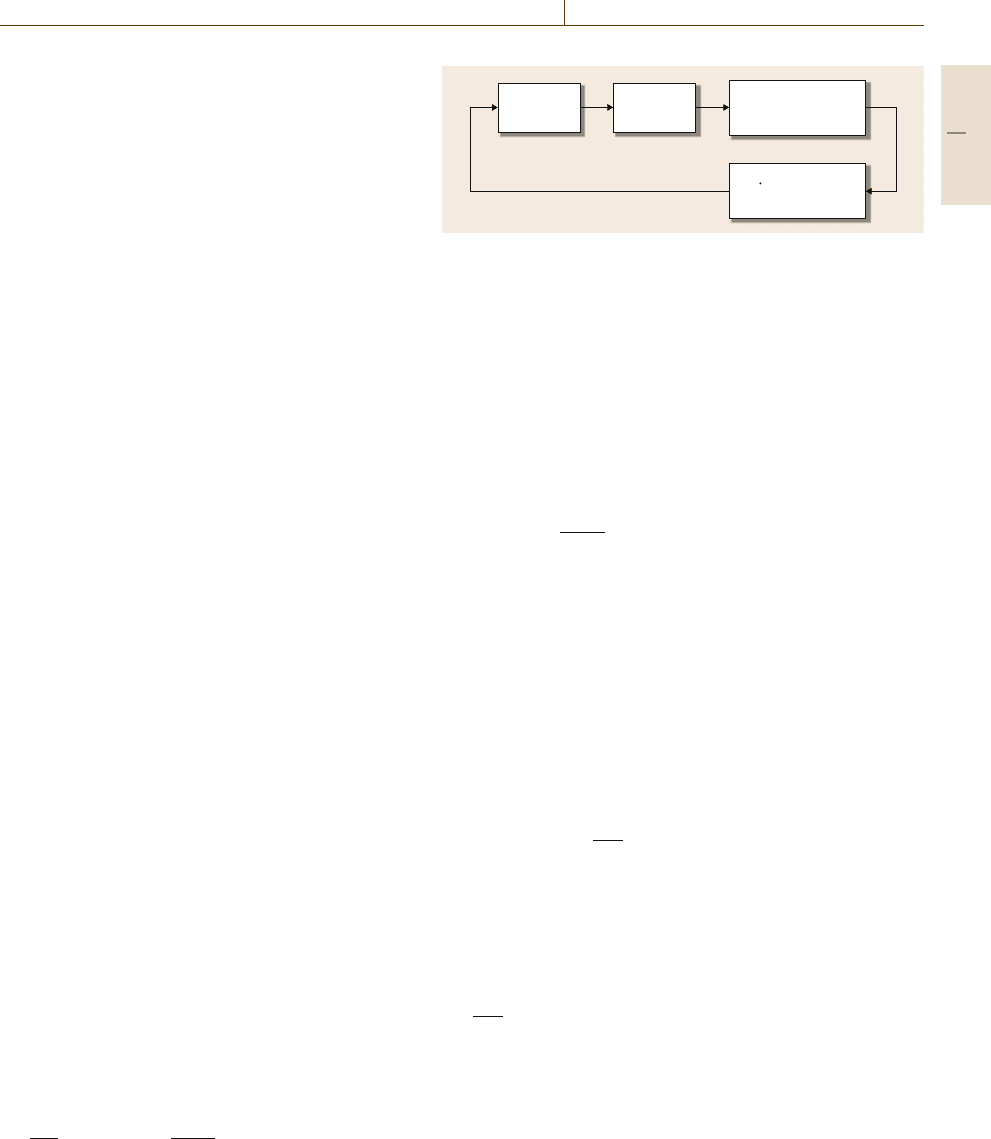
results in a controller, which is a dynamical system
modeled by equations of the form (Fig.9.6)
˙
˜
η =
˜
F
˜
η +
˜
Gy ,
u =σ
L
(Hη) , (9.56)
able to solve a problem of semiglobal stabilization
for (9.52), if its parameters are appropriately chosen
(see [9.6, Chap. 12] and [9.11,12] for further details).
9.6.4 Observers and Full State Estimation
The design of observers for nonlinear systems modeled
by equations of the form
˙
x = f(x, u) ,
y =h(x, u) ,
(9.57)
with state x ∈ R
n
, input u ∈ R
m
, and output y ∈ R
usually requires the preliminary transformation of the
equations describing the system, in a form that suit-
ably corresponds to the observability canonical form
describe earlier for linear systems. In fact, a key re-
quirement for the existence of observers is the existence
of a global changes of coordinates
˜
x =Φ(x) carrying
system (9.57) into a system of the form
˙
˜
x
1
=
˜
f
1
(
˜
x
1
,
˜
x
2
, u) ,
˙
˜
x
2
=
˜
f
2
(
˜
x
1
,
˜
x
2
,
˜
x
3
, u) ,
···
˙
˜
x
n−1
=
˜
f
n−1
(
˜
x
1
,
˜
x
2
,...,
˜
x
n
, u) ,
˙
˜
x
n
=
˜
f
n
(
˜
x
1
,
˜
x
2
,...,
˜
x
n
, u) ,
y =
˜
h(
˜
x
1
, u) , (9.58)
in which the
˜
h(
˜
x
1
, u)and
˜
f
i
(
˜
x
1
,
˜
x
2
,...,
˜
x
i+1
, u) satisfy
∂
˜
h
∂
˜
x
1
=0 , and
∂
˜
f
i
∂
˜
x
i+1
=0 ,
for all i =1,...,n−1
(9.59)
yuη
ˆ
H σ
L
(·)
x
.
= f (x) + g(x)u
y = h(x)
η
˜
= F
˜
η
˜
+ G
˜
y
Fig. 9.6 Control via partial-state estimator
for all
˜
x ∈ R
n
,andallu ∈ R
m
. This form is usu-
ally referred to as the uniform observability canonical
form.
The existence of canonical forms of this kind can be
obtained as follows [9.13, Chap. 2]. Define – recursively
– asequence ofreal-valued functions ϕ
i
(x, u) as follows
ϕ
1
(x, u) :=h(x, u) ,
.
.
.
ϕ
i
(x, u) :=
∂ϕ
i−1
∂x
f(x, u) ,
for i = 1,...,n. Using these functions, define a se-
quence of i-vector-valued functions Φ
i
(x, u) as follows
Φ
i
(x, u) =
⎛
⎜
⎜
⎝
ϕ
1
(x, u)
.
.
.
ϕ
i
(x, u)
⎞
⎟
⎟
⎠
,
for i =1,...,n. Finally, for each of the Φ
i
(x, u), com-
pute the subspace
K
i
(x, u) =ker
∂Φ
i
∂x
(x,u)
,
in which ker[M] denotes the subspace consisting of all
vectors v such that Mv = 0, that is the so-called null
space of the matrix M. Note that, since the entries of
the matrix
∂Φ
i
∂x
are in general dependent on (x, u), so is its null space
K
i
(x, u).
The role played by the objects thus defined in the
construction of the change of coordinates yielding an
observability canonical form is explained in this re-
sult.
Part B 9.6
168 Part B Automation Theory and Scientific Foundations
Lemma 9.7
Consider system (9.57)andthemap
˜
x =Φ(x)defined
by
Φ(x) =
⎛
⎜
⎜
⎜
⎜
⎝
ϕ
1
(x, 0)
ϕ
2
(x, 0)
.
.
.
ϕ
n
(x, 0)
⎞
⎟
⎟
⎟
⎟
⎠
.
Suppose that Φ(x) has a globally defined and contin-
uously differentiable inverse. Suppose also that, for all
i =1,...,n,
dim[K
i
(x, u)]=n −i ,
for all u ∈
R
m
and for all x ∈R
n
K
i
(x, u) =independent of u .
Then, system (9.57) is globally transformed, via Φ(x),
into a system in uniform observability canonical form.
Once a system has been changed into its observ-
ability canonical form, an asymptotic observer can be
built as follows. Take a copy of the dynamics of (9.58),
corrected by an innovation term proportional to the dif-
ference between the output of (9.58) and the output of
the copy. More precisely, consider a system of the form
˙
ˆ
x
1
=
˜
f
1
(
ˆ
x
1
,
ˆ
x
2
, u)+κc
n−1
(y−h(
ˆ
x
1
, u)) ,
˙
ˆ
x
2
=
˜
f
2
(
ˆ
x
1
,
ˆ
x
2
,
ˆ
x
3
, u)+κ
2
c
n−2
(y−h(
ˆ
x
1
, u)) ,
···
˙
ˆ
x
n−1
=
˜
f
n−1
(
ˆ
x, u)+κ
n−1
c
1
(y−h(
ˆ
x
1
, u)) ,
˙
ˆ
x
n
=
˜
f
n
(
ˆ
x, u)+κ
n
c
0
(y−h(
ˆ
x
1
, u)) , (9.60)
in which κ and c
n−1
, c
n−2
,...,c
0
are design parame-
ters.
The state of the system thus defined is able to
asymptotically track, no matter what the initial con-
ditions x(0),
˜
x(0) and the input u(t) are, the state of
yux
ˆ
α (x
ˆ
) σ
L
(·)
x
ˆ
.
= f (x
ˆ
,u)
+ G(y – h(x
ˆ
, u))
x
.
= f (x ,u)
y = h(x ,u)
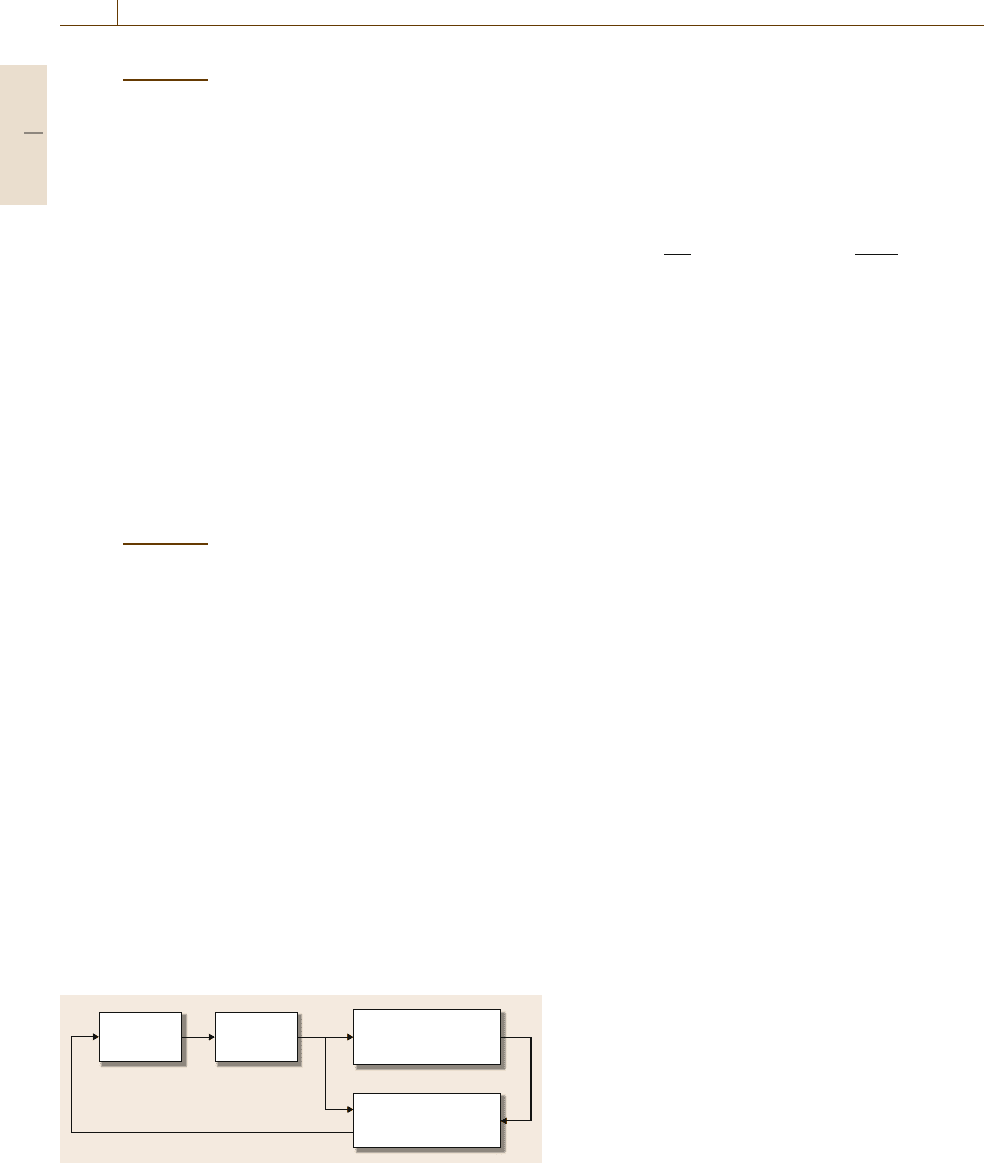
Fig. 9.7 Observer-based control for a nonlinear system
system (9.58) provided that the two following technical
hypotheses hold:
(i) Each of the maps
˜
f
i
(
˜
x
1
,...,
˜
x
i
,
˜
x
i+1
, u), for
i = 1,...,n, is globally Lipschitz with respect to
(
˜
x
1
,...,
˜
x
i
), uniformly in
˜
x
i+1
and u,
(ii) There exist two real numbers α, β, with 0 <α<β,
such that
α ≤
∂
˜
h
∂
˜
x
1
≤β, and α ≤
∂
˜
f
i
∂
˜
x
i+1
≤β,
for all i = 1,...,n−1 ,
for all
˜
x ∈
R
n
,andallu ∈R
m
.
Let the observation error be defined as
e
i
=
ˆ
x
i
−
˜
x
i
, i = 1, 2,...,n .
The fact is that, ifthe two assumptions above hold,there
is a choice of the coefficients c
0
, c
1
,...,c
n−1
and there
is a number κ
∗
such that, if κ ≥κ
∗
, the observation error
asymptotically decays to zero as time tends to infinity,
regardless of what the initial states
˜
x(0),
ˆ
x(0) and the
input u(t) are. For this reason the observer in question
is called a high-gain observer (see [9.13, Chap. 6] for
further details).
The availability of such an observer makes it pos-
sible to design a dynamic, output feedback, stabilizing
control law, thus extending to the case of nonlinear sys-
tems the separation principle for stabilization of linear
systems. In fact, consider a system in canonical form
(9.58), rewritten as
˙
˜
x =
˜
f(
˜
x, u) ,
y =
˜
h(
˜
x, u) .
Suppose a feedback lawis known u=α(
˜
x) that globally
asymptotic stabilizes the equilibrium point
˜
x =0ofthe
closed-loop system
˙
˜
x =
˜
f(
˜
x,α(
˜
x)) .
Then, an output feedback controller of the form
(Fig.9.7)
˙
ˆ
x =
˜
f(
ˆ
x, u)+G[y−
˜
h(
ˆ
x, u)],
u =σ
L
(α(
ˆ
x)) ,
whose dynamics are those of system (9.60)and
σ
L
:R →R is a bounded function satisfying σ
L
(r) =r
for all |r|≤L, is able to stabilize the equilibrium
(
˜
x,
ˆ
x) =(0, 0) of the closed-loop system, with a basin
of attraction that includes any a priori fixed com-
pact set K × K, if its parameters (the coefficients
c
0
, c
1
,...,c
n−1
and the parameter κ of (9.60)and
the parameter L of σ
L
(·)) are appropriately chosen
(see [9.13, Chap. 7] for details).
Part B 9.6
Control Theory for Automation: Fundamentals 9.7 Tracking and Regulation 169
9.7 Tracking and Regulation
9.7.1 The Servomechanism Problem
A central problem in control theory is the design of
feedback controllers so as to have certain outputs of
a given plant to track prescribed reference trajecto-
ries. In any realistic scenario, this control goal has to
be achieved in spite of a good number of phenomena
which would cause the system to behave differently
than expected. These phenomena could be endogenous,
for instance, parameter variations, or exogenous, such
as additional undesired inputs affecting the behavior
of the plant. In numerous design problems, the trajec-
tory to be tracked (or the disturbance to be rejected) is
not available for measurement, nor is it known ahead
of time. Rather, it is only known that this trajectory is
simply an (undefined) member in a set of functions,
for instance, the set of all possible solutions of an or-
dinary differential equation. Theses cases include the
classical problem of the set-point control, the prob-
lem of active suppression of harmonic disturbances
of unknown amplitude, phase and even frequency, the
synchronization of nonlinear oscillations, and similar
others.
In general, a tracking problem of this kind can
be cast in the following terms. Consider a finite-
dimensional, time-invariant, nonlinear system modeled
by equations of the form
˙
x = f(w, x, u) ,
e =h(w, x) ,
y =k(w, x) ,
(9.61)
in which x ∈R
n
is a vector of state variables, u ∈R
m
is a vector of inputs used for control purposes, w ∈R
s
is a vector of inputs which cannot be controlled and
include exogenous commands, exogenous disturbances,
and model uncertainties, e ∈
R
p
is a vector of regulated
outputs which include tracking errors and any other
variable that needs to be steered to 0, and y ∈
R
q
is
a vector of outputs that are available for measurement
and hence used to feed the device that supplies the con-
trol action. The problem is to design a controller, which
receives y(t) as input and produces u(t) as output, able
to guarantee that, in the resulting closed-loop system,
x(t) remains bounded and
lim
t→∞
e(t) =0 , (9.62)
regardless of what the exogenous input w(t) actually is.
As observed at the beginning, w(t) is not available
for measurement, nor it is known ahead of time, but
it is known to belong to a fixed family of functions of
time, the family of all solutions obtained from a fixed
ordinary differential equation of the form
˙
w =s(w)
(9.63)
as the corresponding initial condition w(0) is allowed
to vary on a prescribed set. This autonomous system is
known as the exosystem.
The control law is to be provided by a system mod-
eled by equations of the form
˙
ξ =ϕ(ξ, y) ,
u =γ (ξ, y) ,
(9.64)
with stateξ ∈R
ν
. Theinitial conditions x(0)oftheplant
(9.61), w(0) of the exosystem (9.63), and ξ(0) of the
controller (9.64) are allowed to range over fixed com-
pact sets X ⊂
R
n
, W ⊂ R
s
,andΞ ⊂ R
ν
, respectively.
All maps characterizing the model of the controlled
plant, of the exosystem, and of the controller are as-
sumed to be sufficiently differentiable.
The generalized servomechanism problem (or prob-
lem of output regulation) is to design a feedback
controller of the form (9.64) so as to obtain a closed-
loop system in which all trajectories are bounded and
the regulated output e(t) asymptotically decays to 0 as
t →∞. More precisely, it is required that the composi-
tion of (9.61), (9.63), and (9.64), that is, the autonomous
system
˙
w =s(w) ,
˙
x = f(w, x,γ(ξ, k(w, x))) ,
˙
ξ =ϕ(ξ, k(w, x)) ,
(9.65)
with output e =h(w, x)besuchthat:
•
The positive orbit of W × X ×Ξ is bounded, i. e.,
there exists a bounded subset S of
R
s
×R
n
×R
ν
such
that, for any (w
0
, x
0
, ξ
0
) ∈ W × X ×Ξ , the integral
curve (w(t), x(t), ξ(t)) of (9.65) passing through
(w
0
, x
0
, ξ
0
) at time t = 0 remains in S for all t ≥ 0.
•
lim
t→∞
e(t) =0, uniformly in the initial condition;
i.e., for every ε>0 there exists a time
¯
t,de-
pending only on ε and not on (w
0
, x
0
, ξ
0
)such
that the integral curve (w(t), x(t), ξ(t)) of (9.65)
passing through (w
0
, x
0
, ξ
0
) at time t =0 satisfies
e(t)≤ε for all t ≥
¯
t.
Part B 9.7
170 Part B Automation Theory and Scientific Foundations
9.7.2 Tracking and Regulation
for Linear Systems
We show in this section how the servomechanism prob-
lem is treated in the case of linear systems. Let system
(9.61) and exosystem (9.63) be linear systems, modeled
by equations of the form
˙
w =Sw ,
˙
x =Pw +Ax+Bu ,
e =Qw +Cx ,
(9.66)
and suppose that y = e, i.e., that regulated and meas-
ured variables coincide. We also consider, for simplic-
ity, the case in which m = 1andp =1. Without loss
of generality, it is assumed that all eigenvalues of S are
simple and are on the imaginary axis.
A convenient point of departure for the analysis
is the identification of conditions for the existence of
a solution of the design problem. To this end, consider
a dynamic, output-feedback controller
˙
ξ =Fξ +Ge ,
u =Hξ
(9.67)
and the associated closed-loop system
˙
w =Sw ,
˙
x
˙
ξ
=
P
GQ
w +
ABH
GC F
x
ξ
.
(9.68)
If the controller solves the problem at issue, all trajecto-
ries are bounded and e(t) asymptotically decays to zero.
Boundedness of all trajectories implies that all eigenval-
ues of
ABH
GC F
(9.69)
have nonpositive real part. However, if some of the
eigenvalues of this matrix were on the imaginary axis,
the property of boundednessof trajectories could be lost
as a result of infinitesimal variations in the parameters
of (9.66) and/or (9.67). Thus, only the case in which the
eigenvalues of (9.69) have negative real part is of in-
terest. If the controller is such that this happens, then
necessarily the pair of matrices (A, B) is stabilizable
and the pair of matrices (A, C) is detectable. Observe
now that, if the matrix (9.69) has all eigenvalues with
negative real part, system (9.68) has a well-defined
steady state, which takes place on an invariant subspace
(the steady-state locus). The latter, as shown earlier, is
necessarily the graph of a linear map, which expresses
the x and ξ components of the state vector as functions
of the w component. In other terms, the steady-state
locus is the set of all triplets (w, x, ξ)inwhichw is
arbitrary, while x and ξ are expressed as
x =Πw ,
ξ =Σw ,
for some Π and Σ. Thesematrices, inturn, are solutions
of the Sylvester equation
Π
Σ
S =
P
GQ
+
ABH
GC F
Π
Σ
.
(9.70)
All trajectories asymptotically converge to the steady
state. Thus, in view of the expression thus found for the
steady-state locus, it follows that
lim
t→∞
[x(t)−Πw(t)]=0 ,
lim
t→∞
[ξ(t)−Σw(t)]=0 .
In particular, it is seen from this that
lim
t→∞
e(t) = lim
t→∞
[CΠ +Q]w(t) .
Since w(t) is a persistent function (none of the eigenval-
ues of S has negative real part), it is concluded that the
regulated variable e(t)convergesto0ast →∞only if
the map e =Cx+Qw is zero on the steady-state locus,
i.e., if
0 =CΠ +Q .
(9.71)
Note that the Sylvester equation (9.70) can be split
into two equations, the former of which
ΠS =P+AΠ +BHΣ,
having set Γ :=HΣ, can be rewritten as
ΠS =AΠ +BΓ +P ,
while the second one, bearing in mind the constraint
(9.71), reduces to
ΣS =FΣ.
These arguments have proven – in particular –
that, if there exists a controller that controller solves
the problem, necessarily there exists a pair of matrices
Π,Γ such that
ΠS =AΠ +BΓ +P
0 =CΠ +Q .
(9.72)
Part B 9.7
Control Theory for Automation: Fundamentals 9.7 Tracking and Regulation 171
The (linear) equations thus found are known as the
regulator equations [9.14]. If, as observed above, the
controller is required to solve the problem is spite of
arbitrary (small) variations of the parameters of (9.66),
the existence of solutions (9.72) is required to hold in-
dependently of the specific values of P and Q. This
occurs if and only if none of the eigenvalues of S is
a root of
det
A−λIB
C0
=0 .
(9.73)
This condition is usually referred to as the nonreso-
nance condition.
In summary, it has been shown that, if there exists
a controller that solves the servomechanism problem,
necessarily the controlled plant (with w = 0) is stabiliz-
able and detectable and none of the eigenvalues of S is
a root of (9.73). These necessary conditions turn out to
be also sufficient for the existence of a controller that
solves the servomechanism problem.
A procedure for the design of a controller is de-
scribed below. Let
ψ(λ) =λ
s
+d
s−1
λ
s−1
+···+d
1
λ +d
0
denote the minimal polynomial of S.Set
Φ =
⎛
⎜
⎜
⎜
⎜
⎜
⎝
010··· 00
001··· 00
· · · ··· · ·
000··· 01
−d
0
−d
1
−d
2
··· −d
s−2
−d
s−1
⎞
⎟
⎟
⎟
⎟
⎟
⎠
,
G =
⎛
⎜
⎜
⎜
⎜
⎜
⎝
0
0
···
0
1
⎞
⎟
⎟
⎟
⎟
⎟
⎠
,
H =
100··· 00
.
Let Π,Γ beasolutionpairof(9.72) and note that the
matrix
Υ =
⎛
⎜
⎜
⎜
⎝
Γ
Γ S
···
Γ S
s−1
⎞
⎟
⎟
⎟
⎠
satisfies
Υ S =ΦΥ , Γ =HΥ.
(9.74)
Define a controller as follows:
˙
ξ =Φξ +Ge ,
˙
η =Kη +Le ,
u =Hξ +Mη ,
(9.75)
in which the matrices Φ, G, H are those defined before
and K, L, M are matrices to be determined. Consider
now the associated closed-loop system, which can be
written in the form
˙
w =Sw ,
⎛
⎜
⎝
˙
x
˙
ξ
˙
η
⎞
⎟
⎠
=
⎛
⎜
⎝
P
GQ
LQ
⎞
⎟
⎠
w +
⎛
⎜
⎝
ABHBM
GC Φ 0
LC 0 K
⎞
⎟
⎠
⎛
⎜
⎝
x
ξ
η
⎞
⎟
⎠
.
(9.76)
By assumption, the pair of matrices (A, B) is sta-
bilizable, the pair of matrices (A, C) is detectable, and
none of the eigenvalues of Sis a root of (9.73). As a con-
sequence, in view of the special structure of Φ, G, H,
also the pair
ABH
GC Φ
,
B
0
is stabilizable and the pair
ABH
GC Φ
,
C 0
is detectable. This being the case, it is possible to pick
K, L, M in such a way that all eigenvalues of
⎛
⎜
⎝
ABHBM
GC Φ 0
LC 0 K
⎞
⎟
⎠
have negative real part.
As a result, all trajectories of (9.76) are bounded.
Using (9.72)and(9.74) it is easy to check that the graph
of the mapping
π : w →
⎛
⎜
⎝
Π
Υ
0
⎞
⎟
⎠
w
is invariant for (9.76). This subspace is actually the
steady-state locus of (9.76)ande =Cx+Qw is zero on
this subspace. Hence all trajectories of (9.76) are such
that e(t)convergesto0ast →∞.
The construction described above is insensitive to
small arbitrary variations of the parameters, except for
Part B 9.7
172 Part B Automation Theory and Scientific Foundations
the case of parameter variations in the exosystem. The
case of parameter variations in the exosystem requires
a different design, as explained e.g., in [9.15]. A state-
of-the-art discussion of the servomechanism problem
for suitable classes of nonlinear systems can be found
in [9.16].
9.8 Conclusion
This chapterhas reviewed the fundamental methodsand
models of control theory as applied to automation. The
following two chapters address further advancements in
this area of automation theory.
References
9.1 G.D. Birkhoff: Dynamical Systems (Am. Math. Soc.,
Providence 1927)
9.2 J.K. Hale, L.T. Magalh
˜
aes, W.M. Oliva: Dynamics in
Infinite Dimensions (Springer, New York 2002)
9.3 A. Isidori, C.I. Byrnes: Steady-state behaviors in
nonlinear systems with an application to robust
disturbance rejection, Annu. Rev. Control 32,1–16
(2008)
9.4 E.D. Sontag: On the input-to-state stability prop-
erty,Eur.J.Control1, 24–36 (1995)
9.5 E.D. Sontag, Y. Wang: On characterizations of the
input-to-state stability property, Syst. Control Lett.
24, 351–359 (1995)
9.6 A. Isidori: Nonlinear Control Systems II (Springer,
London 1999)
9.7 A.R. Teel: A nonlinear small gain theorem for
the analysis of control systems with satura-
tions, IEEE Trans. Autom. Control AC-41,1256–1270
(1996)
9.8 Z.P. Jiang, A.R. Teel, L. Praly: Small-gain theorem for
ISS systems and applications, Math. Control Signal
Syst. 7, 95–120 (1994)
9.9 W. Hahn: Stability of Motions (Springer, Berlin, Hei-
delberg 1967)
9.10 A. Isidori: Nonlinear Control Systems, 3rd edn.
(Springer, London 1995)
9.11 H.K. Khalil, F. Esfandiari: Semiglobal stabilization of
a class of nonlinear systems using output feedback,
IEEE Trans. Autom. Control AC-38, 1412–1415 (1993)
9.12 A.R. Teel, L. Praly: Tools for semiglobal stabilization
by partial state and output feedback, SIAM J. Control
Optim. 33, 1443–1485 (1995)
9.13 J.P. Gauthier, I. Kupka: Deterministic Observation
Theory and Applications (Cambridge Univ. Press,
Cambridge 2001)
9.14 B.A. Francis, W.M. Wonham: The internal model
principle of control theory, Automatica 12,457–465
(1976)
9.15 A. Serrani, A. Isidori, L. Marconi: Semiglobal nonlin-
ear output regulation with adaptive internal model,
IEEE Trans. Autom. Control AC-46, 1178–1194 (2001)
9.16 L. Marconi, L. Praly, A. Isidori: Output stabilization
via nonlinear luenberger observers, SIAM J. Control
Optim. 45, 2277–2298 (2006)
Part B 9

173
Control Theor
10. Control Theory for Automation
– Advanced Techniques
István Vajk, Jen
˝
o Hetthéssy, Ruth Bars
Analysis and design of control systems is a complex
field. In order to develop appropriate concepts and
methods to cover this field, mathematical mod-
els of the processes to be controlled are needed
to apply. In this chapter mainly continuous-time
linear systems with multiple input and multiple
output (MIMO systems) are considered. Specifically,
stability, performance, and robustness issues, as
well as optimal control strategies are discussed in
detail for MIMO linear systems. As far as system
representations are concerned, transfer func-
tion matrices, matrix fraction descriptions, and
state-space models are applied in the discussions.
Several interpretations of all stabilizing controllers
are shown for stable and unstable processes. Per-
formance evaluation is supported by applying H
2
and H
∞
norms. As an important class for practical
applications, predictive controllers are also dis-
cussed. In this case, according to the underlying
implementation technique, discrete-time process
models are considered. Transformation methods
using state variable feedback are discussed, mak-
ing the operation of nonlinear dynamic systems
linear in the complete range of their operation.
Finally, the sliding control concept is outlined.
10.1 MIMO Feedback Systems ........................ 173
10.1.1 Transfer Function Models ............ 175
10.1.2 State-Space Models .................... 175
10.1.3 Matrix Fraction Description.......... 176
10.2 All Stabilizing Controllers ...................... 176
10.3 Control Performances............................ 181
10.3.1 Signal Norms ............................. 181
10.3.2 System Norms ............................ 182
10.4 H
2
Optimal Control................................ 183
10.4.1 State-Feedback Problem ............. 183
10.4.2 State-Estimation Problem ........... 184
10.4.3 Output-Feedback Problem .......... 184
10.5 H
∞
Optimal Control .............................. 185
10.5.1 State-Feedback Problem ............. 185
10.5.2 State-Estimation Problem ........... 185
10.5.3 Output-Feedback Problem .......... 186
10.6 Robust Stability and Performance .......... 186
10.7 General Optimal Control Theory ............. 189
10.8 Model-Based Predictive Control ............. 191
10.9 Control of Nonlinear Systems ................. 193
10.9.1 Feedback Linearization ............... 193
10.9.2 Feedback Linearization
Versus Linear Controller Design .... 195
10.9.3 Sliding-Mode Control.................. 195
10.10 Summary ............................................. 196
References .................................................. 197
10.1 MIMO Feedback Systems
This chapter on advanced automatic control for au-
tomation follows the previous introductory chapter. In
this section continuous-time linear systems with multi-
ple input and multiple output (MIMO systems) will be
considered. As far as the mathematical models are con-
cerned, transfer functions, matrix fraction descriptions,
and state-space models will be used [10.1]. Regarding
the notations concerned, transfer functions will always
be denoted by explicitly showing the dependence of
the complex frequency operator s, while variables in
Part B 10
174 Part B Automation Theory and Scientific Foundations
Fig. 10.1 Distillation column in an oil-refinery plant
bold face represent vectors or matrices. Thus, A(s)is
a scalar transfer function, A(s) is a transfer function
matrix, while A is a matrix.
Considering the structure of the systems to be
discussed, feedback control systems will be studied.
Feedback is the most inherent step to create practical
Fig. 10.2 Automated production line
Fig. 10.3 Rolling mill
control systems, as it allows one to change the dynam-
ical and steady-state behavior of various processes to
be controlled to match technical expectations [10.2–7].
In this chapter mainly continuous-time systems such
as those in Figs. 10.1–10.3 will be discussed [10.8].
Note that special care should be taken to derive
their appropriate discrete-time counterparts [10.9–12].
The well-known advantages of feedback structures,
also called closed-loop systems, range from the servo
property (i. e., to force the process output to follow
a prescribed command signal) to effective disturbance
rejection through robustness (the ability to achieve the
control goals inspite of incompleteknowledgeavailable
on the process) and measurement noise attenuation.
When designing a control system, however, stability
should always remain the most important task. Fig-
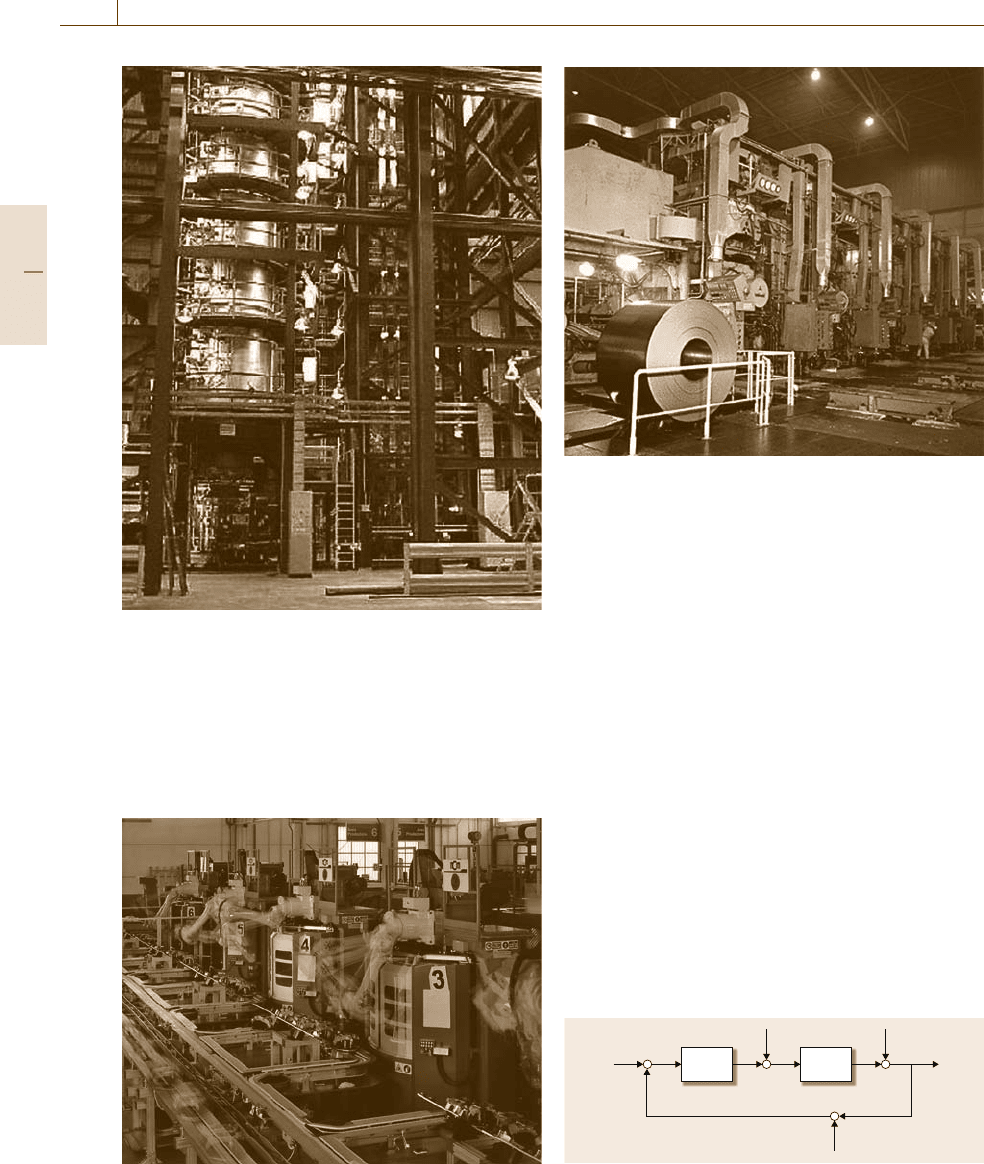
ure 10.4 shows the block diagram of a conventional
closed-loop system with negative feedback, where r is
the set point, y is the controlled variable (output), u is
the process input, d
i
and d
o
are the input and output
disturbances acting on the process, respectively, while
d
n
represents the additive measurement noise [10.2].
K(s)
d
n
d
i
d
o
r
–
e
G(s)
uy
Fig. 10.4 Multivariable feedback system
Part B 10.1