Messerschmidt U. Dislocation Dynamics During Plastic Deformation
Подождите немного. Документ загружается.

50 3 Properties of Dislocations
3.2.4 Interaction Between Parallel Dislocations
The elastic interactions between the moving dislocations and other disloca-
tions in the crystal can basically be understood from the very simple case
of two parallel screw dislocations with equal or opposite Burgers vectors. As
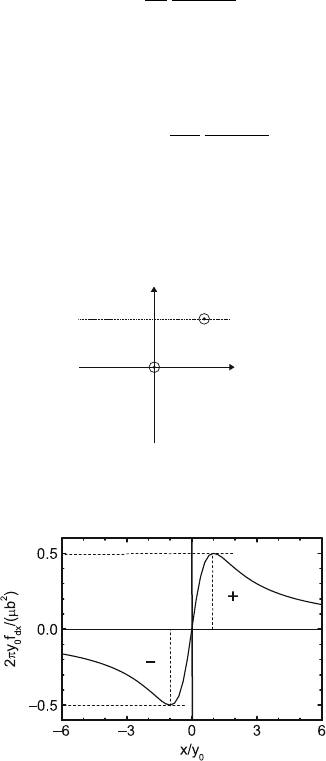
illustrated in Fig. 3.13, one dislocation S1 is situated at the origin of the xy
plane and extends in z direction. It is considered as the source of a field of
internal stresses. The other dislocation S2 represents a probe, which is moved
on an xz plane at the distance y
0
from the origin. Dislocation S1 exerts on S2
a shear stress
σ
23
=
μb
2π
x
x
2
+ y
2
0
(3.24)
on its xz plane of motion, according to (3.10). Considering (3.20), this stress
causes a Peach–Koehler force in x direction
f
dx
= σ
23
b =
μb
2
2π
x
x
2
+ y
2
0
. (3.25)
In Fig. 3.14, the force is plotted as a function of x. It is zero at x =0.
However, there is still σ
13
= 0, i.e., parallel screw dislocations always attract or
x
y
S1
S2
y
o
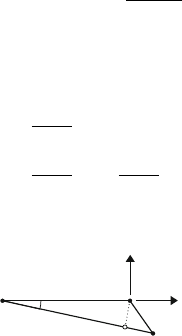
Fig. 3.13. A screw dislocation S2 moving on an xz plane in the stress field of
another parallel screw dislocation S1 situated at the origin of the xy plane
Fig. 3.14. Normalized elastic interaction force in x direction experienced by screw
dislocation S2 in the field of the screw dislocation S1 of Fig. 3.13

3.2 Elastic Properties of Dislocations 51
repel each other, depending on their respective signs. For the present question
of the glide motion of S2 on the xz plane, only the glide force f
dx
is considered,
no cross slip on other planes. The glide force is positive for positive x values
and Burgers vectors of equal sign, but negative for negative x values. This
means that screw dislocations of equal sign repel each other. For Burgers
vectors of opposite sign, the dislocations attract each other on both sides and
the equilibrium at x = 0 is stable with respect to glide on the xz plane. The
site of the maximum interaction force is found by setting
∂f
dx
∂x
=
∂σ
23
b
∂x
=
μb
2
2π
y
2
0
− x
2
(x
2
+ y
2
0
)
2
.
=0.
The solution is x
m
= ±y
0
. Putting this into (3.25) yields the maximum force
f
dxm
= ±
μb
2
4πy
0
. (3.26)
If a moving dislocation is to bypass another one, the maximum interac-
tion force has to be overcome by applying an external stress, in this case σ
23
.
Both the maximum interaction force and the necessary stress to overcome this
force are proportional to 1/y
0
, i.e., the reciprocal distance between the slip
plane of the gliding dislocation and the dislocation causing the internal stress
field. During plastic deformation, the dislocation density increases and, conse-
quently, y
0
decreases. Thus, to continue plastic deformation, the applied stress
has to increase. This is an essential source of hardening during deformation,
the so-called work-hardening.
For plastic deformation, the behavior of edge dislocations is important,
too. The stress field of edge dislocations was introduced in (3.11) and Fig. 3.9.
For the bypassing of two parallel edge dislocations extending in z direction
with Burgers vectors parallel to x and a distance y
0
between their slip planes,
the stress component σ
12
in Fig. 3.9c is relevant. Again, one dislocation moves
as a probe in the stress field of the other one located at the origin. There are
positions of zero stress for x =0andx = ±y
0
. For parallel Burgers vectors, the
signs in Fig. 3.9c indicate the directions of the force. For example, near x =0
and x>0 the probe dislocation is pushed to the left, and for x<0tothe
right, i.e., the equilibrium is stable. Table 3.1 presents the stability conditions
of all equilibrium positions for equal and opposite signs of the Burgers vectors.
It shows the stable position for equal signs at x = 0, corresponding to the tilt
grain boundary, and for opposite signs at x = ±y
0
, corresponding to the edge
dipole. Thus, the edge dislocation dipoles are stable in a position of 45
◦
with
respect to the direction of the Burgers vector.
The maximum force between two bypassing edge dislocations can be
determined in the same way as described earlier for screw dislocations, yielding
f
dm
=
μb
2
8π(1 − ν)y
0
.

52 3 Properties of Dislocations
Table 3.1. Equilibrium positions of two edge dislocations with parallel or antipar-
allel Burgers vectors
x
0
=0 x
0
= ±y
0
b
2
= b
1
Stable, grain boundary Unstable
b
2
= −b
1
Unstable Stable, dislocation dipole
The bypassing (shear) stress is given by τ = f
dm
/b. In other words, an existing
dislocation dipole can be decomposed at a certain stress if its height h is
greater than a critical height
h
c
=
μb
8π(1 − ν)τ
. (3.27)
This is the so-called dipole opening criterion.
If dislocations capture each other in the described equilibrium configura-
tions, the total defect energy is reduced since the stress fields annihilate far
from the dipole. A reference measure is the energy of a dislocation with an
outer cut-off radius R in the logarithmic term of (3.15) equal to the aver-
age distance between the dislocations. For a screw dislocation dipole, R in
(3.13) has to be set equal to the mutual distance between the dislocations
[85]. Since the distance between the dislocations in the dipole is mostly much
smaller than the average distance between the dislocations, the energy of the
dipole is remarkably lower than the above reference energy. Such a disloca-
tion structure where the long-range stresses partially cancel each other may
be called a low-energy dislocation structure (LEDS). If dislocations of equal
sign arrange under stress in nonequilibrium configurations (dislocation pile-
ups), where their stress fields amplify each other, the energy is higher than
the reference value. Theories of work-hardening have been developed on the
basis of both concepts [86, 87].
3.2.5 Interaction Between Nonparallel Dislocations
The elastic interaction between nonparallel dislocations is treated in a way
similar to that between parallel ones. One dislocation is considered the origin
of a field of internal stresses, and the force on the other probe dislocation
is calculated by the general form of the Peach–Koehler formula (3.22). In
contrast to parallel dislocations, now the force depends on the place along
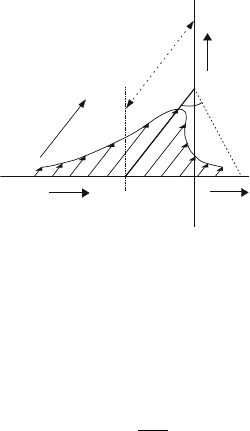
the dislocation. A very simple case described in detail by Nabarro [85] is that
of two perpendicular straight screw dislocations S1 and S2 with the shortest
distance y
0
between them as demonstrated in Fig. 3.15. The coordinate x along
the probe dislocation S2 can be described by the angle θ with tan θ = x/y
0
.
The glide force (per dislocation length), which is the only force in this case,
is then given by
f
dy
=
μb
2
2πy
0
cos
2
θ. (3.28)
3.2 Elastic Properties of Dislocations 53
b
2
b
1
f
y
o
S1
S2
x
θ
x
Fig. 3.15. Force between two orthogonal screw dislocations
A plot of the dependence of the force on the location along S2 is included in
Fig. 3.15. The total force between dislocations of infinite length is obtained
by integrating f
dy
over x from −∞ to +∞ or over θ from −π/2to+π/2,
yielding
F
y
=
μb
2
2
. (3.29)
Thus, the total force is independent of the distance y
0
between the dis-
locations, as first noted by Read [88]. However, the force is increasingly
concentrated in the nearest region between both dislocations if the distance
becomes small. In this local region, the force is higher than that between
parallel dislocations of the same distance (3.26).
A number of individual cases is reviewed by Hartley and Hirth [89] and
Bullough and Sharp [90]. For a general treatment, see Hirth and Lothe [12].
In general, the forces have both glide and climb components so that the dis-
locations, if they comply with the forces, may assume complicated curved
shapes. If the sign of the line vector or the Burgers vector of one dislocation is
reversed, the sign of the force reverses, too. If two signs are changed, the sign
of the force does not change. As the maximum force decreases with 1/y
0
,these
interactions are of long-range character like the interaction between parallel
dislocations.
If moving dislocations meet nonparallel other dislocations, they can inter-
sect each other if the external stress is high enough to overcome the elastic
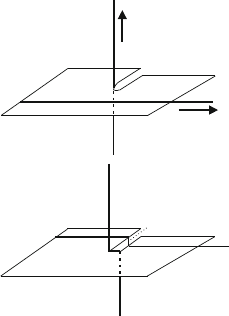
interaction forces. During the intersection process, kinks or jogs are formed
in both dislocations as outlined in Fig. 3.16, where a screw dislocation S1
is cut by a moving screw dislocation S2. The lattice planes around S1 are
distorted as indicated in Fig. 3.16a. The dislocation line S2 moves along this
distorted plane so that its right part is shifted downward and the left part is
shifted upward. Finally, in Fig. 3.16b, both parts are separated by the amount
of the Burgers vector b
1
of S1. The connecting part is a jog J
2
in S2. Like-
wise, the dislocation S1 experiences a shift J
1
. Whether this is a jog or a kink
depends on the slip plane of S1. The jogs and kinks are subject to the rules
of motion described in Sect. 3.1.2. Thus, the jog J
2
in S2 cannot glide with
54 3 Properties of Dislocations
S1
S2
b
1
b
2
J
2
J
1
(a)
(b)
S1
S2
Fig. 3.16. Mutual intersection between two screw dislocations
the dislocation. It has to climb, which involves diffusion, so that the jog acts
as an obstacle to the glide motion of the rest of the dislocation. But even
gliding jogs may represent obstacles since they move on planes different from
the main glide plane.
During the intersection process, a piece of additional dislocation line of
the length of the Burgers vector of the cut dislocation is created. Since the
long-range stress field of the dislocation is only slightly disturbed, the neces-
sary energy is mainly the core energy, estimated in (3.16). While the elastic
interaction between the cutting dislocations is of long-range character, the
process of formation of the jog is restricted to the neighborhood of the cut-
ting site. It is therefore of short-range nature. Long-range and short-range
interactions behave differently with respect to thermal activation, as will be
discussed later in Sects. 4.1 and 5.2.
3.2.6 Elastic Interaction Between Dislocations
and Elastic Inclusions
While the foregoing sections treated the mutual interaction between different
dislocations, the motion of dislocations is also influenced by their interac-
tions with other crystal defects, in particular with foreign atoms solved in
the crystals, or with precipitates of second phases. This is the important field
of solution and precipitation hardening. To estimate the elastic interaction
forces and energies in the framework of linear elasticity theory, the defects are
considered as elastic inclusions with either a volume which differs from that
of the regular lattice site or with a different shear or bulk modulus. Analogous
to the magnetic or electric cases, the interactions are classified as parelastic or
dielastic ones. Defects with a volume difference cause a compressive or dilata-
tional elastic stress field consisting of pure shear stresses while defects with a
3.2 Elastic Properties of Dislocations 55
different shear or bulk modulus do not have an own stress field. Instead, they
modify the stress field of the interacting dislocation.
The hydrostatic components of the stress field of an edge dislocation
produce a pressure
p = −
1
3
(σ
11
+ σ
22
+ σ
33
). (3.30)
Using (3.11) and polar coordinates x = r cos ϕ and y = r sin ϕ, it follows that
p =
μb
e
sin ϕ
3πr
1+ν
1 − ν
. (3.31)
b
e
is the edge component of the Burgers vector. The interaction energy with a
spherical defect of an atomic volume difference ΔΩ with respect to the volume
Ω of the host lattice site is then given by [91]
ΔW
i
=3
1 − ν
1+ν
p ΔΩ,
or, if the interaction constant
β =
μb
e
3π
1+ν
1 − ν
ΔΩ (3.32)
is introduced, it is given by
ΔW
i
=3
1 − ν
1+ν
β
sin ϕ
r
=
μb
e
π
ΔΩ
sin ϕ
r
. (3.33)
For a dislocation moving on a plane at a certain distance to the elastic
inclusion, the interaction force F
i
= −∂ΔW
i
/∂x in the direction of motion x
has a minimum on one side of the inclusion and a maximum on the other.
The signs of these extrema change if the plane of motion changes, e.g., from
the compression side of the dislocation to the tension side. The maximum
parelastic interaction force is given by
F
im
≈
μb
2
e
3
ΔΩ
Ω
, (3.34)
if the minimum distance between the inclusion and the slip plane is set equal
to half the smallest distance b/
√
6 between the {111} planes in the f.c.c.
structure. This force is remarkably smaller than the interaction force between
nonparallel dislocations (3.29), since |ΔΩ/Ω| is only of the order of magnitude
of 0.1. In many tables, the relative volume difference ΔΩ/Ω is replaced by the
size misfit parameter δ =(1/a)(da/dc), where a is the lattice parameter and
c the concentration of the defects, with δ =ΔΩ/(3Ω). A table of respective
data is given in [92].
The parelastic interaction is of long-range character since it decreases
with 1/r. For mixed dislocations, the edge component of the Burgers vector

56 3 Properties of Dislocations
enters the above equations. Screw dislocations, which do not have a hydro-
static stress field, cause only second-order effects. Dielastic interactions affect
both edge and screw dislocations. While the interaction terms are weaker
than for the parelastic interaction, the misfit parameters like (1/μ)(dμ/dc)are
greater so that both kinds of interactions may contribute to the hardening.
The models of parelastic and dielastic interactions between dislocations
and spherical inclusions are mainly applied to solution hardening by sub-
stitutional foreign atoms in metals. A strong interaction may arise between
dislocations and defects with a tetragonal stress field, as was first pointed
out by Fleischer [93]. He calculated the interaction force between a straight
screw dislocation in the cubic structure with a Burgers vector in 110 direc-
tion moving on a slip plane of type {110} (as in the NaCl structure) with
y = const at a distance b to a defect of tetragonal symmetry and 110 dis-
tortion. The dependence of the force F on the position x of the dislocation is
given by
F = F
0
(x/b)
2
+
√
2(x/b) − 1
[(x/b)
2
+1]
2
,
where F
0
= μΔb
2
/3.86, and Δ is the difference between longitudinal and
transverse strains of the tetragonal distortion. For the essential range of x>b,
this function is approximated by the simpler formula [94]
F = F
o
[(x/b)+1]
−2
, (3.35)
which is frequently called the Fleischer approximation. As this function
describes the dependence of the interaction force on the distance between
the dislocation and the defect along x, it is called a force–distance relation
or an interaction profile. Integrating this function between the applied force
and the maximum force F
0
yields the interaction energy with the maximum
interaction energy ΔW
im
= F
0
b. This can be compared with the maximum
parelastic interaction energy for spherical defects (3.33). With r = b for the
nearest approximation between dislocation and defect, and typical values of
ΔΩ =0.1 b
3
on one hand and Δ =0.45 on the other, the interaction with
tetragonal defects turns out to be quite strong. In [95], the calculations of
the interaction profile are extended to several orientations of the tetragonal
defects and slip geometries in the NaCl, f.c.c., and b.c.c. structures as well as
to elastic anisotropy. Several cases were recalculated in [96]. The results differ
from the original Fleischer formula. However, the differences are too small to
be verified by macroscopic measurements.
The models of the interaction of dislocations and elastic inclusions are
used to interpret the hardening by solutes and small precipitates at low tem-
peratures, where the defects do not diffuse, as described in Sect. 4.5. Spherical
inclusions describe the behavior of substitutional defects, while tetragonal
inclusions are applied to interstitial defects, e.g., in b.c.c. crystals and for asso-
ciates between aliovalent impurities and their charge-compensating vacancies
3.2 Elastic Properties of Dislocations 57
in ionic crystals, for which the model was originally derived. At high tem-
peratures, the defects may segregate or, in the case of tetragonal defects,
reorient in the stress field of the dislocations. These clouds may be dragged
with the moving dislocations forming a drag stress, which will be described
in Sect. 4.11.
3.2.7 Bowed-Out Dislocations
In the foregoing sections, only straight dislocations were considered. However,
a dislocation segment pinned at its ends will bow out under the action of an
applied stress. The bowing increases the strain energy of the segment because
of the increase in length, ΔW
d
= EΔL (Sect. 3.2.2). For simplicity, the sub-
script d of E
d
in (3.15) is dropped here. On the other hand, energy is gained
from sweeping an area ΔA supported by the external resolved shear stress τ,
ΔW
a
= τbΔA. If the stress is below a critical value, the segment will find
an equilibrium position, where ΔW
d
− ΔW
a
= 0. The problem of bowed-out
dislocations is mostly treated within the framework of the line tension approx-
imation derived by DeWitt and Koehler [97], analogous to the surface tension
of liquids. In this approximation, the energy of the dislocation depends only
on its orientation β but not on its position with respect to outer or inner
surfaces and to sources of internal stresses like other dislocations, or its own
self-stress, i.e., the logarithmic factor ln(R/r
0
) in (3.15) is constant.
Figure 3.17 shows a finite dislocation segment of length L.Onitsleftside,
it is pinned, and it has a hypothetical node A on its right side. Shifting the
node from A to B causes a change of the energy of the segment by a change
in both its length and its orientation β.IfW
d
= E(β) L is the total energy of
the segment, the change in energy is
dW
d
= E(β)∂L +
∂E(β)
∂β
L∂β.
To keep the segment in equilibrium, tangential and normal forces have to
act at the end point
F
t
= −
∂W
d
∂L
= −E (3.36)
F
n
= −
∂W
d
∂n
= −
∂W
d
L∂β
= −E
. (3.37)
L
A
B
E
E'
∂β
∂L
Fig. 3.17. Shifting the end point of a dislocation segment from A to B

58 3 Properties of Dislocations
E(β)
E'(β)
E'(β)+E"(β)
∂
β
E(β)+E'(β)
∂
β
∂
β
β
+
∂
β
β
∂
β/2
r
Fig. 3.18. Force components at the ends of a bent dislocation segment of
infinitesimal length
n is a coordinate in normal direction at the end of the segment with ∂n = L∂β,
and E
is the derivative of E with respect to β. As the line energy tries to
reduce the length of the segment, −E has to act outside to balance the node.
At a bent dislocation segment, these forces are in equilibrium with the Peach–
Koehler force resulting from the external stress, as illustrated in Fig. 3.18. At
the lower end of the segment, E and E
are taken at the orientation angle β,
whereas at the upper end these quantities have to be taken at the angle
β + ∂β. The respective quantities are indicated in the figure. Since the sign
of the dislocation line vector is opposite at both ends, the sign of the force
vectors is also opposite. The four forces can be projected onto the directions
parallel to the main extension of the dislocation line and perpendicular to it.
The latter projections are marked by the open arrow heads. The components
in direction of the dislocation line cancel each other while the components
perpendicular to it, i.e., in the direction of the dislocation motion, form a net
force pointing at the center of the curved segment. The net force of the two
tangent forces is
(2E + E
∂β)sin
∂β
2
≈ E∂β.
The net force of the two normal forces is
(E
+ E
∂β −E
)cos
∂β
2
≈ E
∂β.
Thus, the total force is
∂F
Γ
=(E + E
)∂β.
This force is in equilibrium with the Peach–Koehler force (3.20) acting on the
segment owing to the external stress
∂F
PK
= f
PK
∂l = τbr∂β.
3.2 Elastic Properties of Dislocations 59
It follows that the radius of curvature of the segment is given by
r =
E + E
τb
=
Γ
τb
. (3.38)
Γ = E + E
is the line tension. It is a force acting in tangential direction
on a dislocation segment and describing the resistance of the segment against
bowing in the case of a weak bow-out. The line tension approximation is a
method to calculate the radius of curvature of a dislocation segment from the
orientation dependence of the energy of a straight dislocation. With the line
energy in the limit of isotropic elasticity (3.15), the line tension becomes
E =
μb
2
4π(1 − ν)
ln
R
r
o
(1 − ν cos
2
β)=E
e
(1 − ν cos
2
β)
E
= E
e
2 ν(−sin
2
β +cos
2
β)
Γ = E
e
(1 + ν − 3ν sin
2
β). (3.39)
E
e
is the energy of the edge dislocation. The energies and line tensions of the
pure screw and edge dislocations are given in Table 3.2. It follows that the
line tension of the screw dislocation is higher than that of the edge, contrary
to the relation between the line energies. Thus, the stiffness against bowing is
higher for the screw dislocation.
For anisotropic crystals, the energy and its second derivative with respect
to the orientation can be calculated within the framework of anisotropic elas-
ticity theory for straight dislocations. In analogy to (3.15), the energy per
dislocation length can then be written as
E = E
0
(β)ln(R/r
0
)=
K(β)b
2
4π
ln (R/r
0
) , (3.40)
with K =4πE
0
/b
2
being the energy factor of the respective dislocation. It
replaces the shear modulus in the respective formulae. In order to calculate
E
(β), the orientation dependence of E(β) can be represented by a Fourier
series. E
(β) is then obtained by differentiating the individual terms with
respect to β. Line tension data for a number of f.c.c., b.c.c., and h.c.p. metals
are tabulated in [98].
In order to find the equilibrium shape of a long dislocation segment under
stress, a parametric description of the coordinates x and y of the dislocation
can be applied [97]
Table 3.2. Line energy and line tension of screw and edge dislocations in isotropic
elasticity
Screw Edge
EE
e
(1 − ν) E
e
ΓE
e
(1 + ν) E
e
(1 − 2ν)