Messerschmidt U. Dislocation Dynamics During Plastic Deformation
Подождите немного. Документ загружается.

70 3 Properties of Dislocations
5 µm
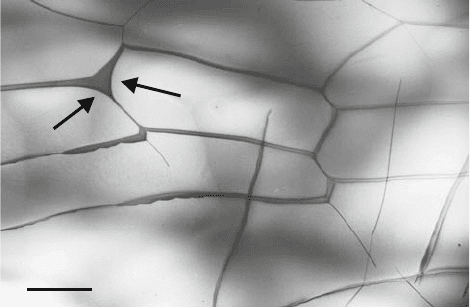
Fig. 3.26. Dislocations in an SiC single crystal plastically deformed at 1700
◦
C
dissociated into Shockley partials. The viewing direction is [0001]. From the work in
[119]
The stacking faults cause a phase shift of the electron wave resulting in
an oscillatory diffraction contrast in the TEM depending on the height of the
fault in the specimen. The direction of R
F
can be determined by contrast
extinction in analogy to (2.9) for the Burgers vector. With respect to the
electron microscopy diffraction contrast, the displacement vector R
F
and the
shearing vector R are equivalent since, in general, both vectors differ by a
translation vector of the lattice. The stacking faults in Fig. 3.26 are parallel to
the foil plane, thus showing a uniform area contrast. The dissociation width is
very large, owing to a very low stacking fault energy in the order of magnitude
of 2 mJ m
−2
. The stacking fault energy can also be determined from the radius
of curvature of the partial dislocations at extended dislocation nodes. Two
curved segments are indicated by arrows in Fig. 3.26. In this case, the bounding
force of the stacking fault is in equilibrium with the line tension of the bowed
partial dislocation. The dissociation of the dislocations essentially influences
their dynamic behavior so that it is important whether the dislocations have
a compact core, or are widely dissociated.
Stacking faults surrounded by a partial dislocation may also form by the
collapse of condensed vacancies, e.g., after quenching a crystal from high tem-
perature. In this case, the Burgers vector of the partial dislocation does not
lie on the fault plane. Thus, these dislocations cannot glide together with the
stacking fault. They are called Frank partial dislocations or Frank dislocation
loops [120].
3.3.3 Twins
Another way to produce a planar fault in the f.c.c. lattice is to mirror the
material on one side of a {111} plane, or to rotate it by 180
◦
. Then, the
stacking sequence ABC is changed into CBA, and the fault is called a twin.
3.3 Dislocations in Crystals 71
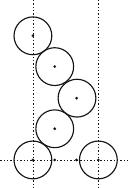
A
B
C
B
A
Fig. 3.27. Stacking sequence at a twin in the f.c.c. lattice. The [
¯
211] direction is
horizontal, the [111] direction is vertical
...ABCAB C BACBA ...
↑
The twin plane is labeled by the arrow. The view of the stacking sequence
corresponding to Fig. 3.24 is presented in Fig. 3.27. Twins can be formed in
small steps by the motion of partial dislocations on neighboring planes
... AB C AB C A B C ...
||||CABCA
|||||BCAB
||||||ABC
|||||||CA
||||||||B
The formation of twins is an alternative way to realize plastic deformation.
A twin lamella T in the intermetallic alloy TiAl will be shown in Fig. 9.8. The
series of partial dislocations creating the twin lamella are clearly visible. The
superdislocations S will be described in Sect. 9.3.
3.3.4 Antiphase Boundaries
Alloys consist of more than one type of atoms, e.g., atoms A and B. These
alloys may crystallize in an ordered structure like the ordered intermetal-
lic alloys. For example, the ordered alloy Ni
3
Al with the L1
2
structure is
based on the f.c.c. structure of the disordered phase. In the ordered state,
however, all atoms at the edges of the cube belong to one atom type (Al), and
all atoms in face centered positions belong to the other one (Ni). The Burgers
vector 1/2110 is a perfect Burgers vector in the disordered state but in the
ordered one, it connects an A atom with a B atom. Dislocations with such a
Burgers vector are called superpartial dislocations. The perfect Burgers vec-
tor in this direction of the superdislocation is therefore 110. Figure 3.28
presents a piece of a crystal consisting of a primitive lattice of A atoms on the
left side and an ordered region of A and B atoms on the right one. A perfect
72 3 Properties of Dislocations
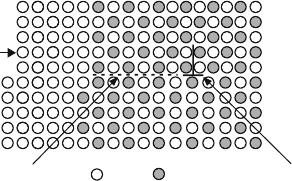
APB SP
AB
b
Fig. 3.28. Schematic of a dislocation having moved in an ordered region as a
superpartial dislocation forming an antiphase boundary
dislocation in the primitive lattice has moved to the right into the ordered
region. There, it has become a superpartial dislocation SP changing A atoms
into B positions. While in the regular ordered structure, atoms are always
neighbored by unlike atoms, now in the wake of the superpartial dislocation
like atoms are in nearest neighbor positions. This is a fault called antiphase
boundary or APB. Antiphase boundaries are two-dimensional faults like the
stacking faults. In this case, the displacement vector R
F
is a lattice vector in
the disordered structure, but not in the ordered one. In the latter, superdis-
locations frequently split into superpartials enclosing an antiphase boundary.
Their width is controlled similarly to that of partial dislocations enclosing
a stacking fault. The splitting of dislocations into superpartial dislocations
essentially influences the properties of dislocations in ordered intermetallic
alloys (Chap. 9).

4
Dislocation Motion
The character of the dislocation motion and the relation between the average
velocity and the applied stress are controlled by the interplay between the
forces on the dislocation segments, which vary in space and time, and the
spectrum of barriers to the dislocation motion. The barriers are very different
with respect to their geometric extension and to their interaction strength,
ranging from arrangements of other dislocations with long-range stress fields
to individual foreign atoms, which interact with the moving dislocations only
in a very limited range. The character of overcoming these obstacles depends
on the total energy necessary to surmount the obstacles and their local exten-
sion as well as on the external parameters like stress and temperature. If the
energy is smaller than about 40kT,wherek is Boltzmann’s constant and T
the absolute temperature, and if the number of participating atoms is smaller
than a few hundred so that collective vibrations are possible, the overcoming
can be supported by thermal activation. In this case, the process strongly
depends on the temperature. In the other case, the whole energy has to be
expended by the external stress. Then, the parameters depend only weakly
on the temperature.
In the following, thermal activation is described by the example of a dis-
location segment locally pinned as in Fig. 3.20b. However, this process is far
more general and plays a role in almost all situations of dislocation motion.
Afterwards, the motion of a dislocation in the intrinsic periodic field of the
crystal lattice is treated followed by the different kinds of obstacles to disloca-
tion motion from single foreign atoms over precipitates to other dislocations.
So far, the obstacles are regarded as fixed in the crystal. At high temperatures,
dislocation motion is influenced by diffusion. Self-diffusion processes under
the external stress or chemical stresses from nonequilibrium concentrations of
point defects may cause the dislocations to climb. Foreign atoms may segregate
to the dislocation cores and move with them. Finally, dislocation mobility laws
will be discussed, which are applicable to sets of phenomenological equations
describing plastic deformation.
74 4 Dislocation Motion
4.1 Thermally Activated Overcoming of Barriers
The theory of the thermally activated overcoming of obstacles to dislocation
motion was based on the thermodynamic treatment of viscous flow by Eyring
[121]. A correct thermodynamic formulation was given by Schoeck [122]. The
basic formulae are demonstrated here for the case of the interaction between
gliding dislocations and localized obstacles, as described in Sect. 3.2.6, and
are therefore formulated in terms of shear stresses τ and shear strain rates ˙γ.
They can, however, analogously be applied to other situations of loading like
normal stresses at problems of climb.
Figure 3.20b shows that a gliding dislocation bows out under the action of
a shear stress between the obstacles resulting in a force on them, for small bow-
outs given by (3.48). In general, the force a bowed-out dislocation segment
of length l exerts is found by a work argument. If the point of action of the
dislocation on the obstacle is shifted forward by dx,wherex is the coordinate
in forward direction, the work done is F dx. At the same time, the dislocation
segment of length l is also shifted forward, supported by the external stress
τ
∗
.The
∗
indicates that an “effective” locally acting stress is meant. It will
be discussed in Sect. 5.2 that
τ
∗
= τ − τ
i
, (4.1)
where τ is the applied shear stress and τ
i
is a long-range internal stress. The
gain in energy from the acting stress is
dW = τ
∗
bl dx = F dx,
which equals the energy spent on the obstacle. Thus, the force on the obstacle
is
F = τ
∗
bl, (4.2)
independent of the strength and configuration of the bow-outs. If the force
on the obstacle is continuously increased, the point of attack will be shifted
as described by the force–distance curve of Fig. 4.1. This curve describes the
elastic response to the force acting. For a certain value of F , the dislocation
is in equilibrium at the position x
e
on the entrance side of the obstacle. If
the force reaches the maximum value of F , the obstacle strength F
max
,the
obstacle is spontaneously surmounted by the action of the stress τ
∗
.This
situation holds at temperature T = 0 K. At all lower forces or stresses, the
dislocation rests in elastic equilibrium at x
e
and can surmount the obstacle
only by the aid of thermal activation. If this happens, the dislocation reaches
the position x
a
on the exit side and is then free to move to the next obstacle.
The equilibrium positions x
e
(stable) and x
a
(unstable) depend on the acting
force. The (Helmholtz) free energy ΔF necessary to overcome the obstacle
at the actual force F is the integral over the force–distance curve from x
e
to

4.1 Thermally Activated Overcoming of Barriers 75
x
e
x
a
x
F(x)
F
ΔW
Δd
ΔG
F
max
Fig. 4.1. Force–distance curve during the overcoming of a localized obstacle
x
a
. (The free energy ΔF should not be mixed up with the force F .) Like the
dislocation moves under the external force F ,theworkΔW =(x
e
− x
a
)F is
gained from the external force or stress. This work corresponds to the rectangle
below the curve and is called the work term. The remaining part ΔG has to
be supplied by thermal activation. It is the Gibbs free energy of activation
for processes at constant pressure and temperature, and corresponds to the
hatched area in the figure. Thus,
ΔG =
x
a
x
e
F (x)dx − (x
a
− x
e
)F,
=ΔF (F ) − ΔdF,
=ΔF (τ
∗
) − Δdlb τ
∗
,
=ΔF (τ
∗
) − Vτ
∗
. (4.3)
The quantity Δd is an effective depth of the obstacle, which is called
the activation distance. Frequently, the force–distance curve is expressed as
F (Δd), for example, in (3.35) for the Fleischer-type interaction between dis-
locations and defects with a tetragonal stress field. The area Δdl is the
activation area. It is the area swept by the dislocation during the activation
event. Finally,
V =Δdlb =ΔAb (4.4)
is the activation volume. Independent of the microscopic interpretation of the
introduced activation parameters of surmounting localized obstacles, these
quantities have a well-defined thermodynamic meaning, valid also for other
processes. The thermodynamic definition of the activation volume is
V = −
∂ΔG
∂τ
∗
. (4.5)
This is true although the integration limits and ΔF in (4.3) depend on the
force or stress. The Gibbs free energy of activation determines the rate of
76 4 Dislocation Motion
overcoming the barriers by a Boltzmann factor
1
t
w
= ν
0
exp
−
ΔG(τ
∗
)
kT
, (4.6)
where t
w
is the average waiting time of the dislocation at the obstacles before
their thermally activated overcoming, and ν
0
is an attempt frequency. Con-
sidering that the dislocation acts as a vibrating string, the attempt frequency
depends on the vibrating segment length l as [123]
ν
0
= bν
D
/l.
Here, ν
D
is the Debye frequency of about 10
13
s
−1
. A more sophisticated
treatment was given in [124] yielding typically
ν
0
≈< 10
11
s
−1
.
For a more detailed discussion see [9]. To obtain the dislocation velocity, the
activation rate of (4.6) has to be multiplied by the distance λ of forward
motion after successful activation. Accordingly,
v
d
=
λ
t
w
= λν
0
exp
−
ΔG(τ
∗
)
kT
= v
d0
exp
−
ΔG(τ
∗
)
kT
. (4.7)
This is the Arrhenius equation of the dislocation velocity. For the consid-
ered array of localized obstacles, the jump distance λ is approximately equal
to the obstacle distance or segment length l. Combining (4.7) with the Orowan
equation for the strain rate (3.5) yields the Arrhenius equation of the strain
rate
˙γ = b
m
λν
0
exp
−
ΔG(τ
∗
)
kT
=˙γ
0
exp
−
ΔG(τ
∗
)
kT
. (4.8)
˙γ
0
is the pre-exponential factor combining the parameters in front of the
exponential function.
Arrhenius relations are applied to many problems of dislocation dynamics.
The thermodynamic meaning of the activation parameters ΔF ,ΔG,andV
is always the same, whereas the microscopic structural interpretation of, for
example, the activation volume as V =Δdlb is valid only for the model of
overcoming localized obstacles. The latter is further developed in Sect. 4.5
considering the statistical problems related to the nonregular arrangement of
the obstacles.
The activation parameters can be measured by macroscopic deformation
tests. The experimental techniques are reviewed in Sect. 2.1, pointing out that
the most convenient methods are differential tests with instantaneous changes

4.1 Thermally Activated Overcoming of Barriers 77
of the deformation parameters and/or stress relaxation tests. The relation
between the (normal) stress σ measured in the tests and the resolved shear
stress used above is given by the Schmid relation τ = m
s
σ (2.3) with the
orientation factor m
s
. For the instantaneous changes, the internal stress τ
i
is
considered to remain constant so that the applied stress changes are equal
to the changes of the locally acting stress, ∂τ = ∂τ
∗
. These relations will be
discussed in Sect. 5.2.2. Differentiating (4.8) with respect to τ and taking (2.8)
into account yields the activation volume
1
m
s
r
=
∂ ln( ˙γ/˙γ
0
)
∂τ
T =const
= −
1
kT
∂ΔG
∂τ
∗
T
=
V
kT
, (4.9)
where r is the strain rate sensitivity. Considering the differentiation rules for
integrals shows that this relation is valid although ΔF and the integration
limits in (4.3) depend on τ
∗
or τ, respectively.
Frequently, the so-called stress exponent m is used to characterize the
dynamic dislocation behavior. It is based on a phenomenological power law
relation between the effective stress and the strain rate
v
d
=const× τ
∗
m
or ˙γ =const× τ
∗
m
. (4.10)
Thus,
m =
∂ ln v
d
∂ ln τ
∗
=
∂ ln ˙γ
∂ ln τ
∗
=
τ
∗
∂ ln ˙γ
∂τ
∗
=
τ
∗
m
s
r
=
σ
∗
r
=
Vτ
∗
kT
. (4.11)
The first equality sign is valid only if the preexponential factor ˙γ
0
remains
constant during the measurement. The work term Vτ
∗
is the work by which
the activation energy is reduced owing to the action of the stress. As usu-
ally τ
∗
= τ, the true stress exponent m has to be distinguished from the
experimental one
m
=
∂ ln ˙γ
∂ ln τ
=
τ
m
s
r
=
σ
r
. (4.12)
In contrast to the activation volume, the relevant energy parameters are
not obtained directly. Differentiating (4.8) with respect to T leads to
∂ ln( ˙γ/˙γ
o
)
∂T
τ
= −
1
kT
∂ΔG
∂T
τ
+
ΔG
kT
2
or
Q
e
= kT
2
∂ ln( ˙γ/˙γ
0
)
∂T
τ
=ΔG + T ΔS =ΔH, (4.13)
since ∂ΔG/∂T = −ΔS is the activation entropy. Thus, the experimental
activation energy Q
e
, which is obtained from a temperature change test in a
creep experiment with constant stress, equals the activation enthalpy ΔH.In
a quasistatic test with constant strain rate,
78 4 Dislocation Motion
Q
e
=ΔH = −kT
2
∂τ
∂T
˙γ
∂ ln( ˙γ/˙γ
0
)
∂τ
T
= −
kT
2
r
∂σ
∂T
˙γ
. (4.14)
The contributions to the activation entropy arise mainly from the fact
that all elastic interactions, that is, both the long-range interactions causing
τ
i
as well as the short-range interactions determining the activation energy,
are proportional to a relevant elastic constant (mostly the shear modulus μ),
which depends on the temperature. If this is taken into account in (4.3) and
it is considered that the derivatives of the integration limits are zero because
of the equilibrium, it follows that
∂ΔG
∂T
=
1
μ
∂μ
∂T
(ΔF + τ
i
V )
=
1
μ
∂μ
∂T
(ΔG + τV) .
Thus,
Q
e
=ΔG −
T
μ
∂μ
∂T
(ΔG + τV)
or
ΔG =
Q
e
+
T
μ
∂μ
∂T
τV
1 −
T
μ
∂μ
∂T
. (4.15)
This equation, derived by Schoeck [122], contains only measurable quan-
tities, not, e.g., τ
∗
.As∂μ/∂T < 0, it follows that the Gibbs free energy is
smaller than the experimental one, ΔG<Q
e
. To determine the interaction
potential of a special process controlling the dislocation mobility, it is neces-
sary to measure V and ΔG over a range of the stress τ as wide as possible. This
can be done by selecting wide ranges of the strain rate ˙γ and the temperature
T . However, it is then mostly questionable whether the preexponential factor
˙γ
0
remains constant as supposed in the derivations of the formulae. According
to (4.8), ΔG describes the preexponential factor for certain values of ˙γ and T .
At constant ˙γ,ΔG should be proportional to T . This may be used as a test
on the constancy of ˙γ
0
and the dominance of a single process controlling the
dislocation motion. As will be shown later, the different mechanisms imply
different values of the activation volume and the activation energies. Thus,
measuring these parameters may help identify the mechanisms of dislocation
mobility.
4.2 Lattice Friction
Owing to the periodic lattice potential, a dislocation moving in a crystal expe-
riences an intrinsic friction stress. As outlined in Fig. 4.2a, without external
stress, an edge dislocation is in a symmetric configuration with the mini-
mum energy W
0
. When the dislocation moves in x direction, the configuration
4.2 Lattice Friction 79
W
o
W
o
W(x)
x
(a) (c)(b)
b
Fig. 4.2. Shifting a dislocation through the lattice with two symmetric
configurations
becomes asymmetric. Accordingly, the energy increases and is a function of
the dislocation position. To increase the dislocation energy requires a stress.
In the middle of the way to the next equivalent minimum energy position,
at a distance of the Burgers vector b, another symmetric position occurs,
as sketched in Fig. 4.2b. Finally, the dislocation reaches the next minimum
energy position as in Fig. 4.2c.
Thus, in a crystal, a straight dislocation moves in a periodic lattice poten-
tial, which causes a frictional stress. This stress is called the Peierls–Nabarro
stress. However, if a straight dislocation moves from one minimum energy
position, a so-called Peierls valley, to the next one as a whole, many bonds
have to be broken and restored simultaneously, still requiring a relatively high
energy. This energy can be expended at small steps by the sidewise motion
of kinks. Starting with a straight dislocation, as a first step, a kink pair has
to be formed, which requires the kink pair formation energy. Afterwards, the
kinks of opposite sign of the pair spread in opposite directions slowly shifting
the whole dislocation to the next Peierls valley. As the kinks also move in
a periodic lattice potential, each step of motion needs a respective energy.
Up to this point, the necessary energy was supplied by the acting mechanical
stress. However, the kink formation and migration energies are usually not
very high. Besides, only a small number of atoms is involved in an elemen-
tary step of the kink motion. Consequently, the kink formation and migration
can be supported by thermal activation, resulting in a strongly temperature-
dependent friction stress. In the following, these processes will be outlined
mainly following the detailed treatment in [12].
4.2.1 Peierls–Nabarro Model
To model the motion of a straight dislocation in the periodic lattice poten-
tial, Dehlinger and Kochend¨orfer [125] suggested to apply the calculations of
Frenkel and Kontorova [126] of a one-dimensional array of balls connected