Messerschmidt U. Dislocation Dynamics During Plastic Deformation
Подождите немного. Документ загружается.


30 2 Experimental Methods
In analogy with the electrical circuit theory, this is also designated by Q
−1
.
Another measure is the logarithmic decrement δ. It is the natural logarithm
of two successive vibration amplitudes of the freely vibrating sample. Both
measures are related by
Q
−1
=
ΔW
W
t
=2δ.
Internal friction measurements can be performed over a very wide range
of frequencies from less than 1 Hz up to the GHz range. The vibration modes
include bending, longitudinal, and torsional oscillations. At low frequencies,
an elongated (wire) specimen is excited by a torsion pendulum. Bending oscil-
lations can be obtained, for example, by suspending the specimen in the
vibration nodes on thin wires and exciting the vibrations by electrostatic
forces with the specimen or a thin metal film on it being one electrode of a
capacitor with another fixed electrode. At high frequencies, piezoelectric or
magnetostrictive transducers are used to excite the longitudinal oscillations.
At very high frequencies, the attenuation of sound waves is measured, which
travel from one transducer at one end of the specimen to another one at the
other end.
The energy losses in the solid are frequently due to thermally activated
relaxation phenomena between different equilibrium positions of a crystal
defect with a waiting time t
w
for the transition given, for example, by (4.6) in
Sect. 4.1. Owing to a small bias due to the applied stress, the populations of
both positions change with the alternating stress. At low vibration frequen-
cies, the defects can easily follow the vibrations. At high frequencies, they
cannot follow at all. If the excitation frequency 2πω equals the relaxation fre-
quency t
−1
w
, there will be a damping maximum. Such measurements are also
called acoustic spectroscopy. The variation of the internal friction is a function
of the quantity ωt
−1
w
. Thus, the variation of the internal friction for obtain-
ing the friction maximum can either be achieved by varying the frequency
ω or by varying the relaxation rate t
−1
w
by changing the temperature. As in
the resonance mode the frequency is more or less fixed, most internal friction
equipments allow measurements over a wide temperature range.
Part of the internal friction studies are devoted to the properties of point
defects (see the review in [56]). Anelastic effects do not occur for defects that
can occupy only one position in the primitive cell or which can take two
centrosymmetric positions. Point defects that produce anelastic effects may
be considered elastic dipoles, which reorient under stress. Such defects are,
for example, interstitials in body-centered cubic crystals. Their orientation
relaxation under stress causes the Snoek effect [57–59]. The defect orientations
can also relax in the stress field of dislocations producing the induced Snoek
effect mentioned in Sect. 4.11. The quantities accessible by internal friction
measurements are the relaxation strength giving information on the concen-
tration of the defects and their anelastic strain contribution, the relaxation
time, and the orientation dependence. The latter yields information on the
symmetry of the defects.

2.5 Other Methods 31
Internal friction measurements are also used to investigate the properties
of dislocations. In materials in which the intrinsic lattice friction (the Peierls
mechanism, see Sect. 4.2) controls the dislocation motion, a Bordoni relax-
ation peak [60] is observed. The interpretation (e.g., [61]) is based on the
assumption of two energetically equivalent equilibrium positions of a dislo-
cation segment pinned at its ends with an acting internal stress. By means
of thermal activation, the segment can shuttle between these equivalent posi-
tions. From the superimposed alternating stress, a bias results with one of the
positions being more probable. If the excitation frequency equals the thermal
vibration frequency of the dislocation segment, a relaxation peak occurs.
In materials in which the lattice friction does not control the dislocation
mobility like in most metals under usual conditions, the pinned dislocation
segment is treated as an elastic string having a mass per length resulting in an
inertia, a line tension which keeps the segment taut, and the motion of which
is viscously damped. This results in an equation of motion given in (4.75) in
Sect. 4.9. This equation has to be solved under the actual boundary conditions.
The model originally suggested by Koehler [62] and developed by Granato
and L¨ucke [63] assumes that the dislocation segment is fixed at its ends by
strong pinning agents like nodes in the dislocation network or precipitates,
and that it is pinned in between by further weak pinning points like solute
atoms or small precipitates. The pinning is described in detail in Sect. 4.5. At
small amplitudes where the dislocation segments do not detach from the weak
pinning points, the short segments vibrate and cause an internal friction peak
with a damping independent of the exciting amplitude. The frequency of the
maximum is usually in the range of tens of MHz, or higher. At frequencies
below the maximum, for the logarithmic decrement the theory yields
δ
i
= α
δ
μb
2
ωBL
4
, (2.10)
where α
δ
is a constant considering the particular orientation relations and the
distribution function of the segment lengths L, μ is the shear modulus, is the
dislocation density (Sect. 3.1.3), b is the absolute value of the Burgers vector
(Sect. 3.1.1), and B is the viscous damping constant in (4.74) in Sect. 4.9.
The damping maximum is connected with a change in Young’s modulus, the
so-called modulus defect,
ΔE
E
= α
E
μL
2
,
which causes a change in the resonant frequency. α
E
is another constant.
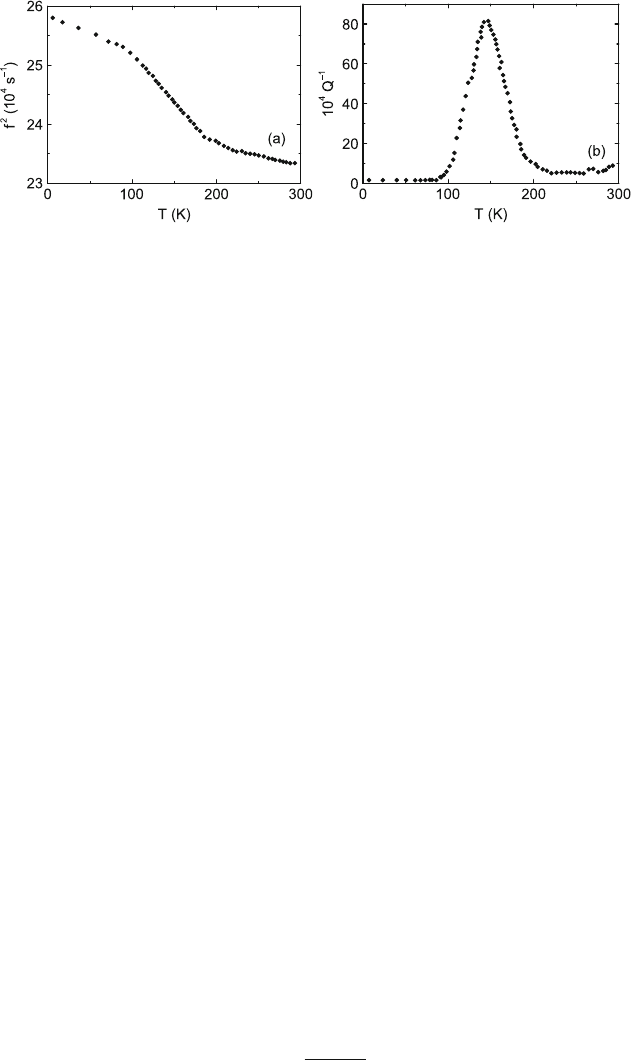
Figure 2.12 presents the temperature dependence of the square of the resonant
frequency and the internal friction of a niobium single crystal at low temper-
atures. Torsional oscillations at about 500 Hz were introduced by electrostatic
excitation.
In a comparative study, the segment length in deformed MgO single crys-
tals has been measured by both internal friction at different temperatures
and in situ straining experiments in an HVEM [65]. For this aim, the quan-
tity δ
i
/(ΔE/E) has been calculated, which has the advantage that the (not
32 2 Experimental Methods
Fig. 2.12. Square of the resonant frequency (which is proportional to the respec-
tive modulus) (a) and internal friction (b) of a niobium single crystal at low
temperatures. The peak is due to lattice friction. Data from [64]
well known) dislocation density is eliminated. With all the uncertainties of
the internal friction method, the values of both techniques well agree.
With increasing vibration amplitude, the dislocation segments detach from
the weak pinning points, leading to an increase in the internal friction. This
amplitude dependent internal friction δ
h
is additive to the amplitude indepen-
dent internal friction δ
i
. The amplitude dependent internal friction should be
related to the macroscopic flow stress at small strains in materials where the
flow stress is controlled by the interaction between dislocations and point-like
obstacles, for example, foreign atoms or very small precipitates (Sect. 4.5). A
phenomenological relation between the decrement, the stress amplitude, the
strain rate at the stress amplitude, the frequency, and the stress exponent
((4.10) in Sect. 4.1) was derived in [66]. For an experimental test of the con-
nection between both methods, it is necessary to define a comparable stress
level. Different criteria have been used. As shown in [67], the stress necessary
to reach a fixed plastic strain due to dislocation motion is a suitable quantity,
which can be measured in both methods. The respective stresses then show
the same temperature dependence.
Internal friction measurements can be performed in situ during simulta-
neous elastic loading or quasistatic plastic deformation as reviewed in [68].
During active plastic deformation, the internal friction increases by both a
structural component δ
s
and a dynamic one δ
d
. The structural component
arises from the increase in the dislocation density during deformation, which
occurs in (2.10). The dynamic component is explained by assuming that the
vibrational energy due to plastic deformation is proportional to the plastic
strain γ achieved during the time of one period 2π/ω,thusΔW
d
∝ ˙γ/ω,
where ˙γ is the plastic strain rate. The latter can be described by the Arrhe-
nius relation (4.8) and (4.3) in Sect. 4.1. Superimposing the constant applied
stress and the oscillating one and integrating over one period yields for the
dynamic damping
δ
d
=
πMV ˙γ
ωkT
,
2.5 Other Methods 33
if the effect of the oscillating stress on the strain rate is linearized. M is the
appropriate elastic modulus and V the activation volume. This is an amplitude
independent internal friction, which is proportional to the macroscopic strain
rate and inversely proportional to the oscillation frequency. If the linearization
is dropped, the friction becomes amplitude dependent.
Because of the nonlinearity of the Arrhenius relation, the superimposed
oscillating stress causes a softening effect, the so-called acousto-plastic effect,
which becomes evident either as an increase in the strain rate during creep
experiments (Archbutt effect [69]) or as a decrease of the flow stress in
quasistatic experiments (Blaha–Langenecker effect [70]). In most materials,
the softening sets in when the oscillation amplitude reaches the amplitude
dependent range.
In conclusion, internal friction measurements are versatile methods to
study dynamic properties of dislocations, in particular the interaction with
localized obstacles.
2.5.4 Nuclear Magnetic Resonance
Nuclear magnetic resonance (NMR) is a complementary technique to study
the static dislocation structure as well as the dynamic behavior of dislo-
cations. In contrast to many other methods, NMR measurements are only
slightly influenced by the surface so that they register bulk properties. To per-
form dynamic measurements, the specimen chamber of a deformation machine
has to be fitted between the pole pieces of the electro-magnet of the NMR
spectrometer. Most experiments are performed in the quasistatic mode at a
constant strain rate, which sometimes has to be quite high, that is, up to
10 s
−1
.
The methods are based on the interaction between nuclear electric
quadrupole moments and electric field gradients of nuclei with a spin I>1/2.
In a cubically symmetric nuclear environment, there does not exist a static
electric field gradient at the nucleus so that there will be no interaction. The
strain field around a dislocation, however, destroys the symmetry resulting in
an interaction. The theory of the techniques is reviewed in [71].
Dislocation density measurements are carried out in ultra-pure crystals in
order to avoid lattice distortions by other defects. The quadrupole broadening
of the NMR signal is then proportional to the square root of the dislocation
density (e.g., [72]). For more detailed studies, the difference between edge
and screw dislocations and the arrangement of the dislocations on several slip
systems may be considered. Dislocation densities on different slip planes can
be obtained from the orientation dependence, as shown in [73].
For studying dislocation dynamics by pulsed nuclear magnetic resonance,
the Orowan equation between the strain rate, the mobile dislocation density,
and the dislocation velocity (3.5) is considered assuming that the dislocation
motion is not continuous but jump-like. Then, the dislocation velocity is given
by v
d
= λ/t
w
,whereλ is the jump distance and t
w
the waiting time between

34 2 Experimental Methods
the jumps. Obstacles causing the jerky motion may be precipitates and, in
particular, forest dislocations. The motion of a dislocation is accompanied
by movements of the surrounding atoms, resulting in a nuclear spin-lattice
relaxation process with a relaxation time in a weak rotating field t
1ρ
.This
parameter is the suited NMR parameter as its “time windows” are in the
range of t
w
. At sufficiently high strain rates where 1/t
w
is large compared to
the Larmor frequency of the rotating frame, there is a relation between the
relaxation time and the strain rate ˙ε
1
t
1ρ
= A
˙ε
bλ
,
where b is the absolute value of the Burgers vector and A is a factor depending
on the nuclear magnetic properties of the dislocation, the mean local magnetic
field in the rotating frame, and the weak rotating applied field. These parame-
ters can be determined separately so that measurements of t
1ρ
yield the jump
distance λ. The experimental values are mostly compatible with the distances
between forest dislocations (e.g., [74]). More recent results on NaCl including
deformation-induced point defects are given in [75].

3
Properties of Dislocations
In order to understand dislocation dynamics, first the geometric and elastic
properties of dislocations have to be treated. The geometric features decide on
the mode of dislocation motion. The elastic stress fields around the disloca-
tions interact with the applied stress and stress fields of all the other defects in
the crystal resulting in forces acting on the moving dislocations. These forces
drive or impede the dislocation motion.
3.1 Geometric Properties
3.1.1 Burgers Vector
The dislocation introduced in Sect. 1.2 is a special case of a general crystal
dislocation, the so-called edge dislocation first described by Orowan, Polanyi,
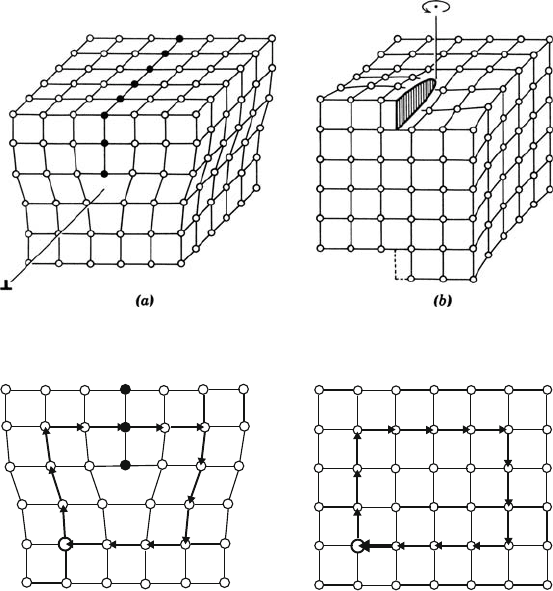
and Taylor [3–5]. Such a dislocation in a primitive cubic model crystal is shown
again in Fig. 3.1a. The inserted extra half-plane is marked by full circles. The
edge dislocations are frequently symbolized by a T (in the present case rotated
by 180
◦
). The other special case is the screw dislocation introduced by Burgers
[6] and is shown in Fig. 3.1b. In contrast to the edge dislocation, the shift
vector or Burgers vector is now parallel to the dislocation line.
The Burgers vector b was introduced in Fig. 1.2 in a qualitative way. An
exact definition is obtained from the so-called Burgers circuit outlined in
Fig. 3.2 [6]. In this construction, the dislocation line is surrounded along a
closed path by a number of defined steps as shown in Fig. 3.2a. The circuit
starts and ends at A. Afterwards exactly the same sequence of steps is repeated
in a perfect reference lattice demonstrated in Fig. 3.2b. Because of the pres-
ence of the dislocation in Fig. 3.2a, the circuit is not closed now. The vector of
the additional step necessary to close the circuit in the reference lattice is the
Burgers vector b. To establish its sign, the direction of the line vector ξ and
the sign of the circuit have to be considered. There exist different conventions,
e.g., [76]. If the sign of the line vector is changed, the sign of the Burgers vec-
tor changes too. For a dislocation in a continuous medium, the Burgers circuit
36 3 Properties of Dislocations
Fig. 3.1. Models of an edge (a) and a screw dislocation (b) in a cubic primitive
lattice
A
A
b
(a) (b)
Fig. 3.2. Definition of the Burgers vector by the Burgers circuit
is replaced by a line integral over the displacements u along a closed curve C
around the dislocation loop. Thus, the Burgers vector is determined by
b =
C
du. (3.1)
The Burgers vector describes both the shift of one part of the crystal
with respect to the other along the face which was swept by the dislocation
causing a change of the shape of the body, and the strength of the elastic
strain field around the dislocation. The character of the dislocation is defined
by the angle β between the Burgers vector b and the line vector ξ of the
dislocation. As described earlier, β =90
◦
for an edge dislocation and β =0
◦
for a screw dislocation. For all the other angles, the dislocation is called a
mixed dislocation. Its Burgers vector may be decomposed into an edge and a
screw component according to
b
s
= b cos β, b
e
= b sin β. (3.2)
3.1 Geometric Properties 37
b
edge
edge
screw
screw
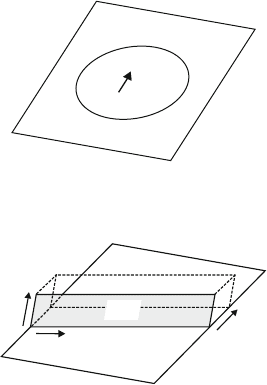
Fig. 3.3. Generation of a glide dislocation loop by shifting the faces adjoining an
internal cut against each other by the Burgers vector b
b
dx
L
ξ
da
Fig. 3.4. Generation of additional crystal volume by the general motion of a
dislocation segment
A dislocation loop with all characters can be generated by an internal cut
ending along a closed line and by shifting the faces adjoining the cut against
each other by the Burgers vector. For a glide loop, this is outlined in Fig. 3.3.
Those parts of the dislocation which are parallel to b have screw character,
those which are perpendicular to it are of edge character, whereas all the other
parts are mixed.
There are some laws of conservation of the Burgers vector. It is constant
along a dislocation line. If a line branches at a dislocation node, the sum of
the Burgers vectors of all branches is zero. Besides, a dislocation cannot end
inside a crystal, but only at a node, or an interior or exterior surface.
3.1.2 Glide and Climb Motion of a Dislocation
The dislocation motion can be accompanied by a change of the crystal volume.
The created volume depends on the directions and magnitudes of the Burgers
vector, the line vector, and the vector of displacement of the dislocation as
depicted in Fig. 3.4. The figure shows a plane containing the Burgers vector
b and a dislocation segment of length L and direction ξ. This segment may
move by a distance dx,sweepinganareada.Sincetheedgecomponentofthe
dislocation represents an incomplete extra lattice plane, its general motion
is connected with an extension or reduction of the size of this extra plane,
resulting in a change of the total crystal volume. As imaged in the figure, the
additional volume is given by the product of the three vectors as
dV =(b · da)=(b · (Lξ) × dx). (3.3)
38 3 Properties of Dislocations
The mode of dislocation motion is defined by the process either being
conservative with respect to the crystal volume, i.e., dV = 0, or being non-
conservative, i.e., dV = 0. In the first case, the motion is called glide or slip.
This is the dominating mode of dislocation motion in most materials and at
most temperatures. The nonconservative motion is called climb and is usually
connected with diffusion. Details of this mode will be described in Sect. 4.10.
As seen from (3.3), the volume production is zero if the dislocation moves
on a face containing the Burgers vector and the line vector. In particular, this
is a plane as shown in Fig. 3.4. This plane is called the glide or slip plane
of the dislocation. The glide plane is well defined for the edge and mixed
dislocations. In an elastic continuum, for a screw dislocation with its Burgers
vector parallel to the dislocation line, all planes containing the dislocation line
are glide planes. In a crystal, however, only selected low-index crystallographic
planes may act as glide planes. Usually, the glide plane of the adjoining edge
part is attributed also to the screw segment of a dislocation. The motion is
called cross glide or cross slip, if the screw segment changes from this plane
to another glide plane.
In a real crystal, the place of a curved dislocation is not a smooth line,
owing to the discrete atomic structure of the material. The dislocation then
consists of straight segments parallel to crystallographic directions and transi-
tions between these straight segments. The transitions can be of atomic height
or may have the height of several atomic distances. If the transition parts are
situated within the slip plane, they are called kinks or superkinks depending
on their height. If the transition parts point out of the slip plane, they are
called jogs. Thus, jogs connect segments of the dislocation in different slip
planes. Kinks and jogs are usual parts of the dislocation. Thus, the mode of
their motion is determined by the relation between the Burgers vector and
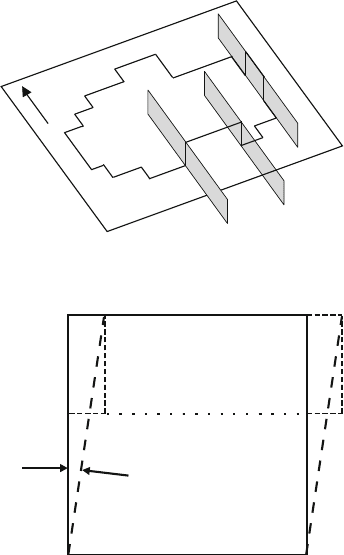
the line vector, as with any other part of the dislocation. Figure 3.5 shows a
dislocation loop with kinks K and jogs J. Since the kinks K extend within the
slip plane, they can glide together with the dislocation. It will be described
in Sect. 4.2.1 that the motion of the dislocations is realized by the formation
and sidewise spreading of the kinks. In contrast to that, the slip planes of
the jogs J (shaded areas) are not identical with the slip plane of the other
segments of the dislocation. The slip plane of a jog in the edge part E of the
dislocation loop extends perpendicular to the main course of the dislocation.
Thus, the jog can glide together with the dislocation if the dislocation loop is
enlarged by plastic deformation. However, the slip plane of a jog in the screw
part S of the loop extends parallel to the general course of the dislocation.
As a consequence, these jogs can glide along the dislocation but they cannot
glide in its forward direction. These jogs represent obstacles to the dislocation
motion. Their forward motion requires climb.
3.1 Geometric Properties 39
b
K
K
K
K
J
J
J
J
S
S
E
E
Fig. 3.5. Kinks K and jogs J in a dislocation loop with edge E and screw parts S
b
L
L
ϕ
Fig. 3.6. Plastic shear strain produced by the motion of one dislocation across a
cube of an edge length L
3.1.3 Relation Between Dislocation Motion
and Plastic Strain and Strain Rate
The plastic strain obtained after the motion of dislocations depends on the
density of dislocations, their Burgers vector, and the distance these disloca-
tions move. Figure 3.6 shows the change of the shape of a cube of edge length L
after one dislocation has moved across the cube. The body has then a surface
step of length L and height b, and is sheared by the strain γ =tanϕ = b/L.
If n dislocations glide only over a fraction λ/L of the length of the body, the
strain is γ = nbλ/L
2
. Since the dislocation density is defined by the dislocation
length per volume, = nL/L
3
, the strain is
γ = bλ. (3.4)
This is the shear strain in a particular slip system. The plastic tensile strain
follows from (2.4). As an example, if dislocations of the density =10
12
m
−2
and the absolute value of the Burgers vector of b =3×10
−10
mmoveovera
distance of λ =10
−4
m each, the resulting shear strain is γ =3×10
−2
=3%.