Марчук Г.И., Лебедев В.И. Численные методы в теории переноса нейтронов
Подождите немного. Документ загружается.

ограничены сверху и снизу равномерно по л. На самом деле для спра-
ведливости указанных результатов достаточно, чтобы условие орто-
гональности выполнялось при каком-либо скалярном произведении,
задающем норму, эквивалентную норме [ ]. При решении систем
(6.9.6) и (6.9.10) необходимо уметь хорошо обращать матричную
функцию Л
п
. Из сказанного выше следует, что для этого можно вос-
пользоваться формулой An
1
= V
n
(VnAnVn)'
1
V
n
.
На практике ячейки часто обладают симметрией, что позволяет
облегчить решение задачи. Пусть ячейка инвариантна относительно
конечной группы ортогональных преобразований Я. И пусть группа
действует на функции по формуле hf (х, Q) = / (fix, Ш). Предполо-
жим,
что функции в уравнении (6.9.1) инвариантны относительно
действия группы на их аргументы. Но тогда и решение будет также
инвариантно относительно группы. Поэтому при решении вариацион-
ной задачи достаточно ограничиться системой координатных функций,
инвариантной относительно действия группы. Это значит, что для h
и любого п найдется такой индекс т = h (п), что <p
n
(hx) = cp
m
(х).
Здесь h задает взаимно однозначное отображение множества индек-
сов на себя. Чтобы приближенное решение было тоже инвариантным,
в разложении (6.9.5) должны участвовать все координатные функции,
которые переходят друг в друга под действием группы.
Заметим, что VJ (hx) = h*V
y
f (#), где у = hx, a h* — сопряжен-
ная к h матрица. Нетрудно установить справедливость соотношений
ul.
w
(ЛИ) =
t&
(Q);
ft.
{k)
(№) =
F
n
k
(0);
Al* (o
h
.
U
)
(ЛО)
=
A?i
(Q);
tR.
m
Л
*
(/)
(QQ') =
Ь
п
ц
(QQ
f
),
которые можно использовать, чтобы уменьшить объем вычислений
при решении системы (6.9.6). В случае вырожденной индикатрисы
рассеяния решение этой системы сводится к решению системы ал-
гебраических линейных уравнений для моментов вектор-функции
S
0
u
n
= (S
0
ag), порядок которой можно значительно уменьшить,
если воспользоваться соотношениями (6.9.13). Коэффициенты и пра-
вые части ее нетрудно вычислить с помощью квадратурных формул
на сфере повышенного порядка точности (см. § 5.10).
Перейдем к задаче выбора системы координатных функций. Есте-
ственно в качестве координатных функций брать близкие к собствен-
ным функциям оператора, полусходного с оператором задачи
[180].
Обозначим 2пТ матрицу линейного преобразования, переводящего
единичный куб в область D, и положим р
п
=
(Т*)~
г
л, где п =
= (п
ъ
Л
2
, п
3
).
Тогда
Фп
(х) = {sin (М; cos ф
п
х)} (6.9.14)
будут пространственными составляющими собственных функций опе-
ратора задачи (6.9.1) с постоянными по х коэффициентами. Нетрудно
проверить, что эта система полна и почти ортогональна в энерге-
тическом пространстве вариационной задачи.
(6.9.13)
130
Можно ожидать лучшую сходимость, если
ср
п
(х)
будут простран-
ственными составлякрщими более близкого оператора.
При
построе-
нии такого оператора ограничимся случаем, когда
D — куб со
сто-
роной
2 я.
Общий случай сводится
к
рассматриваемому соответствую-
щей заменой переменных.
В
качестве полусходного оператора возь-
мем оператор
Busa
—
yiiixAQiQj
—
ljixd—u
+
u—Su
(6.9.15)
^f
dx
i
dx
j
с индикатрисой,
не
зависящей
от
пространственных переменных.
Здесь
№)==
J J
l
(
x
i>
x
')
dx
'> <'=
1
>
2
>
3
>
—я
—я
а интегрирование проводится
по
дополнительным
к xt
переменным.
Пусть
*i
j я
М*,) =
2я
f-^- f-^-> /=1,2,3.
V
' J МО / J /i(0
—я
I —я
Можно убедиться
в том, что
пространственными составляющими
собственных функций оператора
В
будут
ф
п
(*) = {sin (n^i (ATi) +
rt
2
L
2
(*
2
) +
n
3
L
3
(*
8
));
cos (л
х
1 (х
г
) +
+ n
2
L
2
(*
2
) +
n
3
L
3
(x
3
))}
и
что эта
система координатных функций полна
и
почти ортогональна
в энергетическом пространстве задачи. Тогда
для нее
справедливы
приведенные выше результаты.
Отметим,
что
описанные построения координатных функций
в
слу-
чае инвариантности ячейки
и
функций
в
уравнении (6.9.1) приводят
к системам координатных функций, инвариантным относительно
группы симметрии. Рассмотрим некоторые важные примеры дву-
мерных инвариантных ячеек. Пусть
D —
квадрат
со
стороной
2яа,
а
Я —
группа симметрии квадрата
с
элементами
н
:>
*■-(-;
?> *■-(?
э-
А
4
=
(
—
); А
6
= —
h
x
\
h
Q
=—h
2
; А
7
=—й
8
;
h
s
= —
А
4
.
Тогда
Т = a
diag
{1, 1}, а
введенное выше отображение
m = h (п)
является линейным преобразованием
и
имеет
вид A
h
=
T*h*
(Г*)"
1
.
В другом случае, когда ячейка
—
шестиугольник
со
стороной
2яа/]^З
у
а
группа симметрии порождается вращениями
на
угол
я/3
и отражениями относительно диагоналей шестиугольника,
Тж=а
(л/2
2
l)
;
*
к?=Ы3
'
*
= °»
1
'...,б;
131
,± /±coso|)
ft
—sintfft
4
±sini|)
fe
COSI|P
/?/
Ycosifo —-r^rsin^V
±
_
r
sin*
ft
—=r sin
t|>
h
—— sin
\|)
ft
+ cos i|)
ft
Уз Уз
Перейдем к задаче отбора функций из построенной выше коор-
динатной системы (6.9.14) в разложение (6.9.5). Пусть ячейка раз-
бивается на конечное число областей. Рассматриваются ячейки трех
типов с границами областей:
1) плоскими и параллельными граням ячейки;
2) непересекающимися цилиндрическими поверхностями с об-
разующими, перпендикулярными основаниям ячейки;
3) непересекающимися сферическими поверхностями.
Ограничимся модельной задачей, в которой рассеяние и источник
предполагаются изотропными. Все коэффициенты в уравнении (6.9.1)
предполагаются постоянными, а правая часть — кусочно-постоянной.
Будем отбирать в (6.9.5) функции ф
п
(х) из условия минимизации
энергетической нормы невязки приближенного решения. Обозначим
Z^
множество векторов с целочисленными компонентами. И пусть
QN CZ ZOO. Возьмем в (6.9.5) координатные функции с k£ Qw. МОЖНО
показать, что для невязки приближенного решения имеет место
оценка
k$Q
N
k$Q
N
Здесь для ячеек первого типа
c
ft
=l/(max(l,
/г?)тах(1,
ni)max(l, n
2
3
)max(l
t
Yn\ (nl +
nl)))
9
для ячеек второго типа
c
h
=l/(max(l,/2
3
2
)niax(l,(n? + nl)
3
/
2
)max(l, (п\ +
п
2
2
+ Лз)
1/2
))
и для ячеек третьего типа
c
k
= 1/max (1, (п\ + п\ +
я*)
5
/
2
).
Отберем в Q
N
k, для которых
c
h
^ UN. (6.9.16)
При обычном методе отбора функций в (6.9.5) фиксируются мак-
симальные порядки N
l9
N
2
, Л^з одномерных гармоник. Далее, в QN
отбираются векторы с компонентами
|л*|<#1,
i = 1, 2, 3. (6.9.17)
Для сравнения двух методов отбора координатных функций в ка-
честве чисел Ы
ъ
N
2
и
JV
3
в (6.9.17) возьмем наибольшие целые решения
неравенства (6.9.16) соответственно на векторах вида (k
ly
О, 0),
(0,
&
2
, 0) и (0, 0, k
3
). Зависимость порядка решаемой системы Р от N
132
Таблица
6.1
Тип ячейки
PN
Ы
^N
[
в
лг]
1
~Л/
3
'
7
~ р-2/З
~w
~ р-1/3
2
~
N
l/2
\nN
_ п-1/2 | р
r
N
1П Г
АГ
~N
5/6
_
р-3/10
3
~
л/
3
/
5
~ р-1/3
^Л/З/5
~ р-1/з
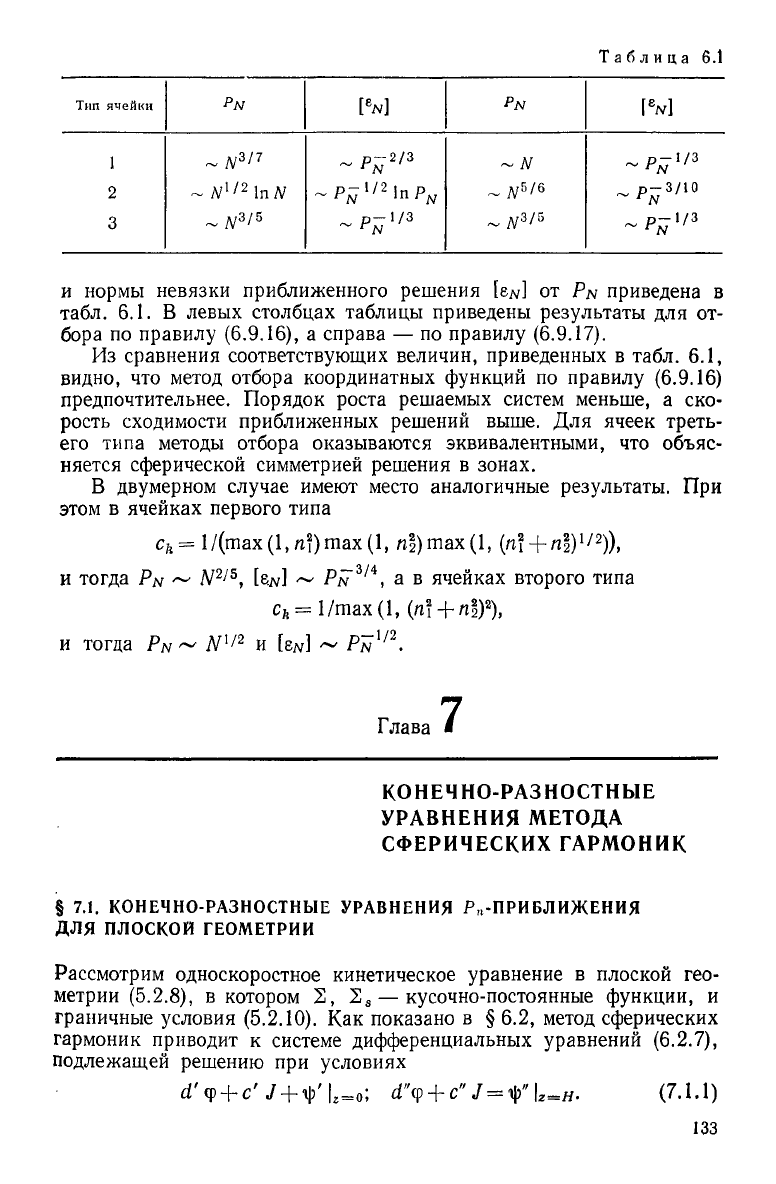
и нормы невязки приближенного решения [e
N
] от PN приведена в
табл. 6.1. В левых столбцах таблицы приведены результаты для от-
бора по правилу (6.9.16), а справа — по правилу (6.9.17).
Из сравнения соответствующих величин, приведенных в табл. 6.1,
видно, что метод отбора координатных функций по правилу (6.9.16)
предпочтительнее. Порядок роста решаемых систем меньше, а ско-
рость сходимости приближенных решений выше. Для ячеек треть-
его типа методы отбора оказываются эквивалентными, что объяс-
няется сферической симметрией решения в зонах.
В двумерном случае имеют место аналогичные результаты. При
этом в ячейках первого типа
c
ft
=l/(max(l,n?)max(l,n!)max(l,(nf + /tl)
1
/
2
)),
и тогда PN ~ Л/
2/5
, [е^] ~ PN
3/4
, а в ячейках второго типа
c
ft
==l/max(l,(n? +
n
2
2
)
2
),
и тогда P
N
~ N
1/2
И Ы ~ PN
42
.
Глава ■
КОНЕЧНО-РАЗНОСТНЫЕ
УРАВНЕНИЯ МЕТОДА
СФЕРИЧЕСКИХ ГАРМОНИК
§
7.1. КОНЕЧНО-РАЗНОСТНЫЕ УРАВНЕНИЯ Р
П
-ПРИБЛИЖЕНИЯ
ДЛЯ
ПЛОСКОЙ ГЕОМЕТРИИ
Рассмотрим односкоростное кинетическое уравнение в плоской гео-
метрии (5.2.8), в котором 2, 2
S
— кусочно-постоянные функции, и
граничные условия (5.2.10). Как показано в § 6.2, метод сферических
гармоник приводит к системе дифференциальных уравнений (6.2.7),
подлежащей решению при условиях
d
'cp + c'/ + i|/Uo;
d"<p
+ c"J =
V\,-
H
.
(7.1.1)
133
Здесь У, ф, /, F, i|)\
я|)"
—
вектор-функции; а, Р, а, 6, с', с", d',
<Г
—
матрицы.
Для этой задачи напишем разностные уравнения. Поскольку при
применении метода сеток к задачам подобного типа возникает боль-
шое количество неизвестных, получим наряду с обычными разност-
ные уравнения повышенной точности, позволяющие укрупнить шаг
сетки.
Весь интервал изменения переменной z разобьем узловыми точ-
ками z
k
на частичные интервалы. В число узлов включим все точки,
в которых элементы матриц а, р, а, b и вектор-функции F, f терпят
разрыв. Элементы матриц считаем постоянными внутри интервалов
сетки. Пусть z
ft
, z
k+1
— две соседние точки сетки. Az
h
= z
k
—z
k
_
ly
k = 1,2, ..., N\ z
0
= 0; z
N
= H. Обозначим A/
ft
разность f
h
— /
ft
_
x
,
где f
k
— левосторонний предел функции / в точке z
k
, а /
Л
_
х
— пра-
восторонний предел функции / в точке z
k
_
x
. Значения кусочно-по-
стоянных функций на интервале
[z
k
„
ly
z
k
] снабдим индексом k — 1/2,
а если из самого изложения очевидно, где берутся значения функций,
то индексы ставить не будем.
Проинтегрируем уравнения (6.2.7) по [z
h
_
lt
z
k
]:
z
k
z
k
*Vk-Jh-i] + a \
<pdz
=
f;
р(ф
к
-ф
Л
.!) +
6
j Jdz =
F,
(7.1.2)
z
h-x
z
k-i
где
z
k
z
k
/ = J fdz\ F= $ Fdz. (7.1.3)
z
h-i
z
u-\
Применим к интегральным членам квадратурную формулу Эй-
лера. Если и £ С
5
[z
ft
_!, zj, то
fi*_
!
^ta^
+
-^((Aj
L
_(i.)j
+
o«^
t
,.,4
Z
fe-1
Сначала пренебрежем в квадратурной формуле членами порядка
О ((Az
ft
)
3
). Тогда получим разностные уравнения, локально аппрок-
симирующие дифференциальные уравнения (6.2.7) с точностью
О ((Azfc)
2
) при ф, J б С
3
\zk-
lf
z
k
]:
a&J
k
+ abz
k
(
Фл
+
ф
й
_!)/2
= /; РЛфь + bAz
h
(J
k
+ J
k
^)/2 = F.
(7.1.5)
К уравнению (7.1.5) добавим два краевых условия при z = z
0
,
z = z
N
:
d'<Po + c'J
0
= \|>';
dT<p
N
+ c"J
N
=
г|>".
(7.1.6)
Систему уравнений (7.1.5), (7.1.6) можно или непосредственно
решать методом матричной прогонки (см. § 7.6), или, предварительно
преобразовав ее к «трехточечному» виду путем исключения неизвест-
134
ных
Jh,
решать методом матричной прогонки уравнения
для <р
[162,
198].
Покажем способ исключения
J
k
из
системы (7.1.5), (7.1.6)^
для
этого
из
пары уравнений (7.1.5) выразим
J
k
и Jk-i
через /&_1/2,
Fh-\/2,
ф&,
фй-1*
A
=
a,-i
1/2
(/
ft
-
1/2
-
Аг
»
«*-*/»
(
Ф
>
+
Ф>-1))/2
+
+ 6*ii/j(f*-i/s-P*-i/iA9»)/^; (7.1.7)
J
ft
,
1
=-a
fe
-i,
/2
[/"
ft
.
1/2
- ***«»-*/« (
Фь
+
Ф>-1))/2
+
+ foil/2(^-1/2
—
Рй-1/
2
Дфл)/А2:
й
.
(7.1.8)
Пусть
0 < k < N.
Заменяя
в
(7.1.8)
k на k + 1,
получаем выра-
жение
для J
k
,
приравнивая которое (7.1.7)
для J
h
,
находим «трех-
точечное» уравнение, связывающее
ф
й
_
х
,
<p
fc
,
ф
Л+1
:
—Ь# i/2
PA+I/2
Афл-и/Д^л-и +
6Л"— I
/2
Р*-1/2
Дфл/Лг*
+
+ A2fc
+
i
a
*+1 /2
«ft+i/2
(ФЙ
+
9fc+i)/4
+
Az
ft
ан±
i
/
2
a
ft
_
1/2
(ф
Л
+
Ф
й
_1)/4
=
= ((a-i7)*+i/«
+
(a"
1
D*-i/i)/2
+
(б"
1
F)
k
_
1/2
/Az
h
-(6-
1
F)
k+1/2
/Az
k+v
(7.1.9)
Полагая
в
(7.1.7)
k = N ив
(7.1.8)
&
= 1 и
подставляя
/
0
, JN
в (7.1.6), получаем
<*'
Фо
+
с
1
((а"
1
а)
1/2
Ьг
х
(ф
х
+
Фо)/4—(Ь"
1
Р)
1/2
(ф
х
—ФоУЛгО
=
=
al)'
+
c
/
((a-V)i/2/2-(6-
1
?)i/
2
/A^
1
); (7.1.10)
d"
Ф*—с"
((а"
1
а)дг_1/2
AZN
(ФАГ-1
+
флг)/4
+
+ Ф"
1
Р)дг-1 /2 (флг
—
флг-
0/Дглг)
=
= г|>"-с"
((or*/)N-I/«/2
+ (б"
1
F)N.
1/2
/A*N).
(7.1.11)
Если известно,
что
решение (6.2.7) четно относительно
г = 0, то
-Д
=
0.
Следовательно,
J
0
=
b~
l
F
0
.
Учитывая
это, в
уравнении
(7.1.8),
записанном
при
k = 1,
получаем
—
(а-
1
а)
1/я
Д*!
(Фо
+
Фх)/4
+
(б"
1
Р)
1/2
(Ф1 —
Фо)/Аг
х
«
= (6-
1
?)
1/2
/A2
1
-(a-
1
/)i/2/2-fto
1
F
0
. (7.1.12)
Таким образом,
в
уравнениях (7.1.9)—(7.1.11) точно учтены гра-
ничные условия.
В полученных системах уравнений двухдиагональные матрицы
a, р
не зависят
от z, а
матрицы
a, b
— диагональные.
Это
обстоятельство
облегчает проведение матричной прогонки. Системы уравнений
(7.1.9)—(7.1.12) имеют
вид
-4*Фм*
+
Д*Ф*-С*Ф*-1
=
0*. k=0
9
l
f
...
9
N, (7.1.13)
где
AN =
C
Q
= 0.
135
Теперь воспользуемся формулой Эйлера, пренебрегая в ней чле-
ном О ((AZft)
5
). Тогда из (7.1.2) получим
аДУ
й
+
аД
2й
(ф/.
+ Ф/.-1)/
2
-(Д2
й
)
2
аА(-^-)
й
/12 =
/;
|
РЛ
Ф
,
+
6Дг
й
(У
h
+ A-i)/2 -
(Дг
й
)
2
6Л
(-|-) J
12
= ?.
(7.1.14)
(7.1.15)
Исключая из этих уравнений производные с помощью системы
(6.2.7),
получаем
(а +
(Д
2ь
)
2
ар"
1
6/12)
ДУ
ft
+ Az
ft
а (
Фй
+ фй.Л/г =
= T+{bz
h
yaf,-iAF
h
/12;
(Р
+ (Дг
Л
)
2
6а-1а/12)Д
Фй
+ Д
2й
6(У
/
, + /
й
_
1
)/2 =
=
F
+ (Az
h
)4a-iAf
k
/l2.
К системе (7.1.15) добавим два уравнения (7.1.6). Система (7.1.15)
аппроксимирует дифференциальные уравнения (6.2.7) уже с точностью
О ((Дгь)
4
) при ф, J €
C
5
[z
h
_!,
z
h
].
Повторяя изложенный ранее способ, исключим из системы (7.1.15)
УЙ
и получим трехточечное матричное уравнение и граничные условия
ТОЛЬКО ДЛЯ фь.
Для этого обозначим
N = a + {Az
k
f(af>-
1
b)/l2;
М
=
Дг„а/2;
P
=
$
+
(Az
h
)*{ba-
1
a)/\2;
Q
= Az
h
b/2; y=7+(Az
ft
)
2
(ap-
1
)AF
ft
/12;
w
= F + (Az
h
f {ba-
1
)Af
k
l\2.
Тогда
J
k
= (iVft-11/2 (Ofc_i/2 — Mfe-l/2 (фЬ + ф*-1»/2 +
+ Qhli/2 {Wh-i/2—Pk-i/t Афи));
«fft-i = (Qft-i/2 (a»jk-i/a—Ph-i/л Афй)/2—
— Nk±i/2{v
h
-i/z — Л1ц_1/а(фк +
фи-1))).
Следовательно,
-(Q-
1
Я)
к+1/
,
Дф
й+1
+
(Q-
1
P)
h
_i/,
Лфь Ь
(ЛГ"
1
M)
ft+1/2
(
Фй+1
+
Фй
)
+
+ {N-
1
M)
h
.
m
(
Фк
+ ф
л
_,) =
(iV-i
o)
ft+1/
,
+
(Л^-
1
v)
h
.
lfi
-
— A(Q-
1
ay)
ft+
i/
2
,
а при г = 0иг=Я
d'Фо-С ((Q-
1
/Л/2
Лфх-СЛГ
1
М)
1/г
(
ф1
+
Фо))/2
=
=
iJ)'-c'(Q-
1
^
—
N-
X
v\
h
l2\
d"
<PN-C"
{{N-
1
M)
N
-m
(<PN
+
Ф*_1)/2
+
+
(Q"
1
/>_
1/2
Дф^)
= V-c" (N-
1
v
+
Q"
1
tw)
w
_
1/a
/2.
(7.1.16)
(7.1.17)
Система уравнений (7.1.16), (7.1.17) является системой типа
(7.1.13).
136
§ 7.2. КОНЕЧНО-РАЗНОСТНЫЕ УРАВНЕНИЯ Р
П
-ПРИБЛИЖЕНИЯ
ДЛЯ СФЕРИЧЕСКОЙ ГЕОМЕТРИИ
Рассмотрим Р
п
-уравнения
для
сферической геометрии (6.2.18),
где
т = 0, 1, ..., n, a
cp
n+1
===0.
Для
этих уравнений требуется решить
на отрезке
[О, R]
краевую задачу
с
некоторыми краевыми условиями
при
г ~ 0, г = R.
Запишем
их в
матричном виде
a-±L + ±AJ +
aq>=f;
|3 -^- + j-B
V
+
bJ
=
F,
(7
.2.1)
где кусочно-постоянные матрицы
а, а, Р,
Ь,
А,
В и вектор-функции
/, F
определяются формулами
§ 6.2 [см.
(6.2.18), (6.2.19)].
Получим систему разностных уравнений.
Для
этого разобьем
[О,
R] на
отрезки
[г
к
_
ъ
rj,
£=1,2,
..., N, г
0
= 0, r
h
> r
k
_
ly
r
N
= R,
включив
в
число точек
r
h
все точки разрывов элементов матриц
и
век-
торов
/, F. Из
системы (7.2.1) целесообразно выделить уравнение
при
т
= 0, так как оно
является точным уравнением баланса нейтронов
для кинетического уравнения
^^-/-
2
ф1
+
2
0
Фо
=
/о.
(7.2.2)
г
2
dr
Для него составим разностное уравнение особо
и так,
чтобы оно явля-
лось разностным аналогом интегрального уравнения баланса.
Для
этого проинтегрируем умноженное
на г
2
уравнение (7.2.2)
по
отрез-
ку
[/ft-i,r
fc
l:
HI<Pi
f
fc —fl?-i<Pi,ft-i
+
2o
jj
4>or
2
dr
=
f
0
, (7.2.3)
где
/"=
$
/
0
гМг. (7.2.4)
Для m
> 0
умножим /л-е уравнение (6.2.18)
на г и
проинтегрируем
по
[/Vi, r
k
].
Затем воспользуемся формулой интегрирования
по
частям.
В
результате получим
А(/-(тф
т
-1
+
(т+1)ф
то+1
))
л
—
J
(т
2
фт-1-(^+1)
2
Фт+1)^
+
+ S
m
(2m+1)
J
9
w
rdr=:(2m
+
l)/;, (7.2.5)
r
h-i
Г
Ц
где
7т = J
f
m
rdr
при т > 0.
137
Применяя
к
интегралам
в
(7.2.3), (7.2.5) формулу трапеций,
по-
лучаем разностные уравнения:
А
(г
2
<Pi)
fc
+
2
0
Ar
A
(rl ф
0
й
+
rj_
1 Фо
k
-i)/2
=
Го\
(7.2.6)
A(r(/mp
m
_
1
+(m + 09m+l))fc — АоДт^ф™..!,
Л
+ ф
то
-.1, *-i) —
—
(т+
1)"(Ф
т+
1,
Й
+ф
то
+1,
ft-i))/2
+
S
TO
(2т
+
1)
Ar
ft
(r
ft
cp
mft
+
+ г
л
.
1Фт|Ы
)/2
=
(2т+ 1)/~
,
(7.2.7)
которые аппроксимируют задачу
с
точностью О
(
(Ar
ft
)
2
), если г
2
<р
0
,
Фт
€ С
3
[r
ft
_
b
r
ft
], т = 1, 2, ..., п.
Применяя
к
интегральным членам уравнений (7.2.3), (7.2.5) фор-
мулу Эйлера, получаем разностные уравнения, левые части которых
представляют собой сумму левых частей уравнений (7.2.6)
или
(7.2.7)
и следующих добавок:
для уравнения (7.2.6)
-2
0
(Д/-*)
2
Д (2г
Фо
+
r4<p
0
/dr)
k
/l2, (7.2.8)
для уравнения (7.2.7)
-(Ar
A
)
2
A(-m
2
^
m
Vdr+(m+l)
2
^
w+1
/^
+
+ (2m+ l)2
m
(rdtpjdr+<p
n
))
h
/l2.
(7.2.9)
В добавки (7.2.8), (7.2.9) входят производные; выразим
их че-
рез функции
ф, У,
используя уравнения (7.2.1):
^=a-*(f-a<p--±-Aj\ -^==$-i(F-bJ-yB<p\. (7.2.10)
В результате получим двухточечную систему разностных уравнений,
аппроксимирующую
с
точностью
О
((Ar
fe
)
4
) систему дифференци-
альных уравнений (6.2.18), если г
2
ф
0
,
ф
т
£ С
б
[r
ft
_
x
,
r
ft
], т = 1, 2,
..., п.
ЭТИ системы разностных уравнений дополним уравнениями
краевых условий.
§ 7.3. КОНЕЧНО-РАЗНОСТНЫЕ УРАВНЕНИЯ МЕТОДА СФЕРИЧЕСКИХ
ГАРМОНИК ДЛЯ ЦИЛИНДРИЧЕСКОЙ ГЕОМЕТРИИ
В одномерной цилиндрической геометрии система уравнений мето-
да сферических гармоник имеет
вид
(6.3.10)
при т = 0 и
(6.3.11)
при
т
^
1
(где п + т —
четное число,
т < л).
Обозначим вектор-столбцы
Ф
= (фоо, Фз2»—» Ф2Ь, 2j); «f = (фш Фзъ Фаз»--» Фай+i, 2j+i);
/—(/(Xb-'-i /2ft, г/)! ^=(/ll»*-«» /2A+I, 2i+l)'
Систему (6.3.10), (6.3.11) запишем
в
матричном виде (7.2.1),
где
двухдиагональные матрицы
а, Л, р, В не
зависят
от г, а
матрицы
а,
&
— диагональные
с
кусочно-постоянными коэффициентами. Пусть
(М,
* = 0, ..., N
— разбиение отрезка,
в
которое входят
все
раз-
рывы элементов матриц а, Ь
и
функций
/, /s г
0
= 0, r
fc
>
r
ft
_
x
,
г# =
138
Для получения разностных уравнений умножим уравнения (7.2.1)
на г и проинтегрируем по отрезку [г
к
_
ъ
r
k
]. Тогда, если восполь-
зоваться формулой интегрирования по частям, будем иметь
a(H(rJ)
k
)
+ (A
— а)
Г
Jdr
+
a
f
cprdr
= /;
r
ft-i
r
h-i
Р(Д(/чр)
Л
) + (А-Р) j ydr +
Ь
j М/г =
,Р;
r
/i-i
r
fe-i
(7.3.1)
где /= jj frdr\ F= J
/rdr.
f
fc-i
r
k-i
Заменяя в (7.3.1) интегралы по формуле трапеций, получаем раз-
ностные уравнения:
аД
(rJ)
h
+ (Л-a)
Ar
h
{J
k
+J
h
_
1
)/2 +
+
aSr
h
{r
k
<p
h
+
r
h
_
x
cp
ft
_x)/2
=7;
РД
(np)
fc
+ (£-p)
Дг*
(
Фй
+cp
ft
.
1
)/2 +
+ Mr
ft
(r
ft
/
ft
+ r
ft
.
1
y
ft
_
1
)/2 = ?,
(7.3.2)
аппроксимирующие при cp, J £ С
3
[/Vi> г&] с точностью О ((Дг&)
2
)
дифференциальные уравнения (6.3.10), (6.3.11).
Заменим теперь интегралы в (7.3.1) квадратурами Эйлера (7.1.4),
в которых производные с помощью уравнения (7.2.10) выражены че-
рез значения функций. Тогда
§ Ч>Л' =
Дг
А
(ф
к
+
ф»_
1
)/2
+
+ (Аг,)
а
р-
1
(6A/
ft
+ в
А
(-1 ф)
к
-Д^») / 2;
'ft
j
фГЙг
= Лг
к
(г
л
ф
к
-Ьг
А
_
1
ф
к
_
1
)/2 +
f
ft-x
(7.3.3)
+ (Дг
л
)
2
(р-
1
(0Лф
л
+ М(л/)ь-
-А(гШ-Дф
А
)/12.
Аналогичны формулы для J /dr, J /rdr. Подставляя их в (7.3.1),
r
k-i
r
h-l
получаем
139