Малафеев С.И., Малафеева А.А. Моделирование и расчет автоматических систем
Подождите немного. Документ загружается.


181
з
u
– сигнал задания;
ε – ошибка регулирования;
sH
рс
– передаточная функция пропорционально-
интегрального регулятора скорости;
;
)1(
)(
sT
sTk
sH
рс
рсрс
рс
рс
k ,
рс
T – коэффициент передачи и постоянная времени регуля-
тора скорости;
с
u – выходной сигнал регулятора скорости без учета ограниче-
ния;
с
uF
1
– нелинейная характеристика, отражающая ограничение
выходного сигнала регулятора скорости;
;
;
;
)(
1
мсм
мм
мсс
с
при
при
при
uuu
uuu
uuu
uF
с
м
u – максимального значение выходного сигнала регулятора
скорости
м
u = 10В;
sH
рт
– передаточная функция пропорционально-
интегрального регулятора тока;
;
)1(
)(
sT
sTk
sH
рт
ртрт
рт
рт
k ,
рт
T – коэффициент передачи и постоянная времени про-
порционально-интегрального регулятора тока;
т
u – выходной сигнал регулятора тока без учета ограничения;
т
uF
2
– нелинейная характеристика, отражающая ограничение
выходного сигнала регулятора тока;

182
;
;
;
)(
2
мтм
мтм
мтт
т
при
при
при
uuu
uuu
uuu
uF
у
k – коэффициент передачи усилителя мощности;
u – выходное напряжение усилителя мощности;
r,
L
– активное сопротивление и индуктивность якорной об-
мотки двигателя;
i – ток якорной обмотки;
с – конструктивная постоянная двигателя;
J – момент инерции механической нагрузки, приведенный к
валу двигателя;
с
k – коэффициент передачи датчика скорости;
с
M – зависимость момента нагрузки от скорости;
sgn
0
MM
с
;
0
M - момент трения покоя;
M – электромагнитный момент двигателя;
,,
3 c
MMF - нелинейная зависимость, моделирующая тор-
можение двигателя за счет сил трения;
;00
;0
),,(
3
и при 0
при
с
с
с
MM
MM
MMF
iF
4
- статическая характеристика функционального преобра-
зователя;
iiikiF sgn
т
2
4
;
т
k – коэффициент передачи датчика тока;
- коэффициент пропорциональности.
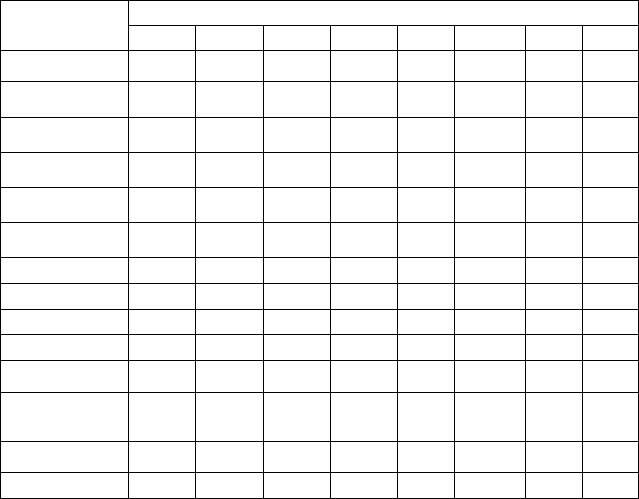
Исходные данные для расчета автоматической системы регули-
рования скорости приведены в табл. 4.8.
183
Таблица 4.8
Данные для расчетов автоматической системы
регулирования скорости
Вариант Параметр
1 2 3 4 5 6 7 8
з
u , B
2 2,5 3 4 3 2,5 3 2,5
рc
k
10 10 20 10 10 20 20 25
рc
T , с
0,4 0,2 0,2 0,2 0,2 0,2 0,25
0,3
рт
k
10 10 5 5 10 8 10 10
рт
T , с
0,05 0,05 0,02 0,02 0,04
0,04 0,05
0,05
у
k
30 30 25 25 25 25 40 40
r, Ом 0,5 0,5 0,4 0,4 1 1 1 1
L, мГн 25 25 8 8 80 80 50 50
с, Вс/рад
1 1 1 1 0,8 1,2 1 1
J, кгм
2
0,5 0,5 0,5 1,0 0,2 0,5 0,8 1,0
т
k , В/А
0,002 0,001 0,001 0,001 0,01
0,01 0,01
0,01
с
k , Вс/рад
0,05 0,05 0,04 0,04 0,0
5
0,04 0,0
5
0,0
5
0
M , Нм
20 25 25 10 20 20 15 20
, 1/А 0,1 0,2 0,2 0,1 0,2 0,01 0,01
0,01
Примечания:
1. В табл. 4.8 приведены значения
з
u и
c
M , соответствующие
рабочей точке системы. При составлении линеаризованной модели
системы следует определить приближенную зависимость сигнала
обратной связи по току от тока двигателя.
2. Область устойчивости системы следует построить в плоско-
сти параметров (
рс
k ,
рс
T ).
3. При оптимизации системы определите наилучшие в смысле
минимума интегральной квадратичной оценки значения параметров
ПИ-регулятора скорости
рс
k и
рс
T .
184
3. При исследовании динамических характеристик линеаризо-
ванной системы определите зависимости скорости и тока двигателя
от напряжения задания и момента нагрузки.
4. Для нелинейной системы определите статические характе-
ристики:
- зависимости скорости и ошибки регулирования от сигнала за-
дания;
- зависимости тока двигателя и ошибки регулирования от мо-
мента нагрузки.
Контрольные вопросы
1. Объясните структурную схему системы, укажите обратные
связи и их назначение.
2. Как различаются статические и динамические характеристи-
ки системы при малых и больших нагрузках?
3. Как зависит ток двигателя от момента нагрузки в установив-
шемся режиме и почему?
4. Как изменятся статические и динамические характеристики
системы, если использовать в качестве регулятора скорости П-
регулирующее устройство?
5. Какое значение имеет квадратичная составляющая обратной
связи по току в системе? Как изменятся свойства системы при ис-
ключении линейной составляющей обратной связи по току?
4.10. Следящий электропривод
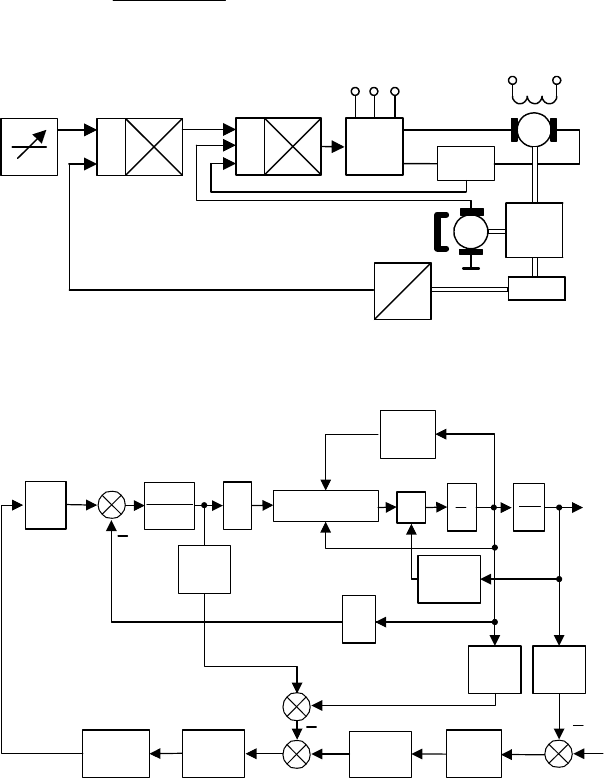
Функциональная схема системы приведена на рис. 4.17. На
схеме обозначено: ЗУ – задающее устройство; РП – регулятор поло-
жения; РТ – регулятор тока; УМ – усилитель мощности; М – двига-
тель постоянного тока независимого возбуждения (ОВ – обмотка
возбуждения,
в
u - напряжение питания обмотки возбуждения); ДТ –
датчик тока; МП – механическая передача; ТГ – тахогенератор; ОР
– объект регулирования; ДП – датчик положения.
Структурная схема системы приведена на рис. 4.18. На схеме
обозначено:
з
u – сигнал задания;
185
ε – ошибка регулирования;
sH
рп
– передаточная функция пропорционально-
интегрального регулятора положения;
;
)1(
)(
sT
sTk
sH
рп
рпрп
рп
ЗУ РП РТ
>
~380 В, 50 Гц
УМ
ДТ
ОР
М
ОВ
+
-
в
u
ТГ
u
ДП
МП
Рис. 4.17. Функциональная схема следящего электропривода
i
ε
oc
u
з
u
т
u
Ω
с
k
)(
т2
uF
u
M
c
т
k
c
с
M
) , ,(
c3
MMF
)(
рт
sH )(
рп
sH
rLs
1
s
1
s
k
м
)(
4
F
п
u
п1
uF
у
k
с
k
п
k
с
M
Рис. 4.18. Структурная схема следящего электропривода
186
рп
k ,
рп
T – коэффициент передачи и постоянная времени регуля-
тора положения;
п
u - выходной сигнал регулятора положения;
п
uF
1
– нелиней-
ная характеристика, отражающая ограничение выходного сигнала
регулятора скорости;
;
;
;
)(
1
мсм
мсм
мпп
п
при
при
при
uuu
uuu
uuu
uF
м
u – максимальное значение выходного сигнала регулятора
скорости
м
u = 10В;
sH
рт
- передаточная функция пропорционально-
интегрального регулятора тока;
;
)1(
)(
sT
sTk
sH
рт
ртрт
рт
т
u - выходной сигнал регулятора тока;
т
uF
2
– нелинейная характеристика, отражающая ограничение
выходного сигнала регулятора тока;
;
;
;
)(
2
мтм
мтм
мтп
т
при
при
при
uuu
uuu
uuu
uF
у
k - коэффициент передачи усилителя мощности;
u – выходное напряжение усилителя мощности;
r,
L
– активное сопротивление и индуктивность якорной об-
мотки двигателя;
i – ток якорной обмотки;
с – конструктивная постоянная двигателя;
M
– электромагнитный момент двигателя;
с
M – статический момент сопротивления нагрузки;
т
k – коэффициент передачи датчика тока;
с
k – коэффициент передачи датчика скорости;
п
k – коэффициент передачи датчика положения;
187
,,
3 с
MMF - нелинейная характеристика, моделирующая ме-
ханическое движение объекта регулирования под действием элек-
тромагнитного момента двигателя и момента сопротивления на-
грузки;
- угловая скорость вращения вала двигателя;
с
M – нелинейная зависимость момента сопротивления от
скорости;
sgn
0
MM
с
;
м
k - коэффициент передачи редуктора;
0
M - значение статического момента нагрузки;
– угол поворота;
4
F – нелинейная зависимость момента инерции нагрузки от
угла поворота;
;
1
1
)(
4
αsin
J
F
J – момент инерции нагрузки, приведенный к валу двигателя;
– коэффициент пропорциональности.
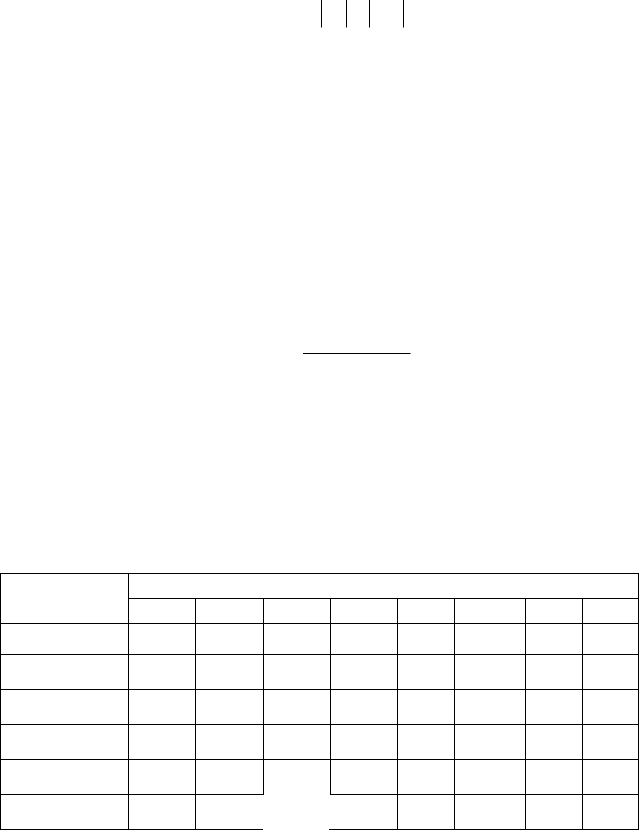
Исходные данные для расчета системы приведены в табл. 4.9.
Таблица 4.9
Данные для расчетов следящего электропривода
Вариант Параметр
1 2 3 4 5 6 7 8
з
u , B
0,2 0,5 1,0 1,5 2,0 2,0 1,6 1,2
рп
k
20 15 25 15 8 8 10 10
рп
T , с
0,3 0,2 0,25 0,5 0,4 0,5 0,5 0,4
рт
k
10 15 20 20 2 2 2 2
рт
T , с
0,05 0,04 0,08 0,04 0,05
0,025
0,02
0,02
у
k
25 25 30 40 35 40 35 40
;0 и 0 при 0
;0 при
),,(
с
с
с3
MM
MM
MMF
188
Окончание табл. 4.9
r, Ом 1,0 1,0 0,5 0,5 0,4 0,8 0,5 0,5
L, мГн 50 40 40 20 20 20 10 10
с, Вс/рад
1,0 0,8 1,5 1,0 1,0 0,5 1,0 1,0
J, кгм
2
0,2 0,5 0,4 0,4 0,8 0,5 0,2 0,2
м
k
0,1 0,05 0,04 0,02 0,02
0,01 0,01
0,01
0
M , Нм
1 1,5 2 2 2,5 5 1 2
т
k , В/А
0,02 0,01 0,04 0,02 0,01
0,005
0,01
0,01
с
k , Вс/рад
0,1 0,2 0,2 0,05 0,1 0,05 0,08
0,07
п
k , В/рад
1,0 2,0 2,5 2,5 2,5 2,5 2,5 2,0
0,5 0,6 -0,8 0,8 0,6 -0,8 0,6 -0,6
Примечания:
1. В табл. 4.9 приведено значение
з
u , соответствующее рабочей
точке системы. При составлении линеаризованной модели системы
следует определить приближенную зависимость момента инерции
нагрузки, приведенного к валу двигателя, от угла поворота.
2. Область устойчивости системы следует построить в плоско-
сти параметров (
рп
k ,
рп
T ) или (
с
k , J).
3. При оптимизации системы определите наилучшие в смысле
минимума интегральной квадратичной оценки значения параметров
ПИ-регулятора положения
рп
k и
рп
T .
4. При исследовании динамических характеристик линеаризо-
ванной системы определите зависимости скорости и тока двигателя,
а также угла поворота от напряжения задания и момента нагрузки.
5. Для нелинейной системы определите зависимость показате-
лей качества регулирования (времени регулирования и перерегули-
рования) от начального значения угла поворота при малых откло-
нениях от установившегося значения.
Контрольные вопросы
1. Объясните физическую сущность нелинейной зависимости
момента инерции механизма от положения.

189
2. Как зависят статические и динамические характеристики
системы от положения механизма?
3. Как зависит ток двигателя от скорости в установившемся
режиме и почему?
4. Как изменятся статические и динамические характеристики
системы, если использовать в качестве регулятора скорости П-
регулирующее устройство?
5. Какими способами можно уменьшить влияние нелинейной
характеристики момента инерции на свойства системы?
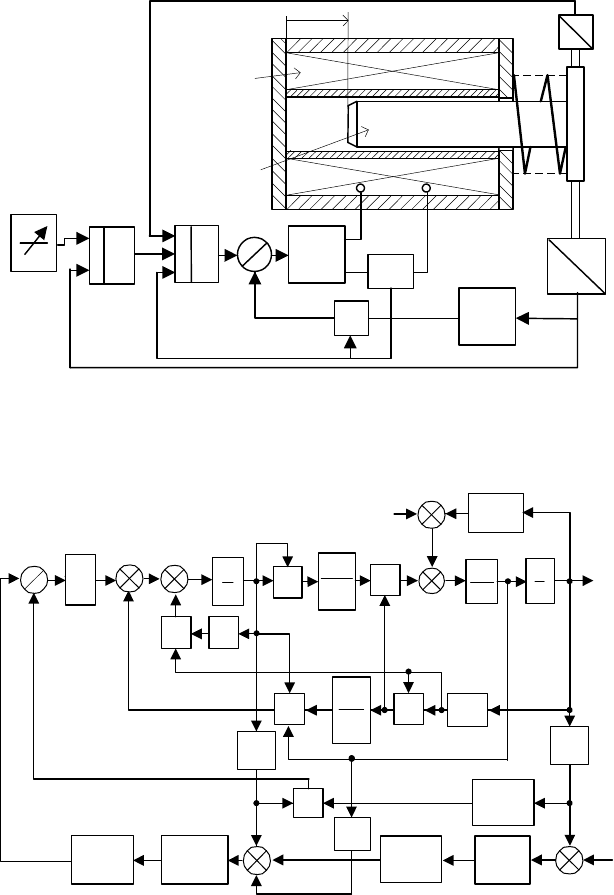
4.11. Электромагнитный следящий привод
Функциональная схема системы приведена на рис. 4.19. На
схеме обозначено: ЗУ – задающее устройство; РП – регулятор поло-
жения, РТ - регулятор тока, БД - блок деления, УМ - усилитель
мощности, ДТ - датчик тока, БП - блок перемножения, ФП - функ-
циональный преобразователь, ДП - датчик положения, ДС – датчик
скорости; электромагнит соленоидного типа ЭМ с обмоткой ОЭ,
подвижным сердечником (якорем) Я и возвратной пружиной ВП,
z
- координата положения сердечника, отсчитываемая от задней
крышки соленоида.
Структурная схема системы приведена на рис. 4.20. На схеме
обозначено:
з
u – сигнал задания;
z
- координата положения сердечника;
ос
u - выходное напряжение датчика положения;
ε – ошибка регулирования;
sH
рп
– передаточная функция пропорционально-интеграль-
ного регулятора положения;
;
)1(
)(
sT
sTk
sH
рп
рпрп
рп
рп
k ,
рп
T – коэффициент передачи и постоянная времени регуля-
тора положения;
190
ЗУ
РП РТ
>
УМ
ДТ
БП
u
ДПБД
z
z
zF
ЭМ
Я
ВП
ОЭ
u
v
ДС
ФП
Рис. 4.19. Функциональная схема электромагнитного следящего привода
i
ε
oc
u
з
u
т
u
)(
т2
uF
u
)(
рт
sH )(
рп
sH
s
1
п
u
п1
uF
у
k
ms
1
r
1
2
м
2
w
2
м
w
zG
т
k
п
k
z
т2
uF
т
F
s
F
u
zF
п
ос0
uF
п
F
v
v
с
k
Рис. 4.20. Структурная схема электромагнитного следящего привода
п
u - выходной сигнал регулятора положения;