Лекции по курсу Математическая физика
Подождите немного. Документ загружается.


f : R
3
→ R
3
x
y
z
f
−→
f
x
(x, y, z)
f
y
(x, y, z)
f
z
(x, y, z)
;
r : [t
1
, t
2
] → R
3
t
r
−→
x = ϕ(t)
y = ψ(t)
z = ω(t)
.
f [t
1
, t
2
]
P = hf, vi A =
t
2
R
t
1
P (t) dt
v(t) = r
0
(t) =
£
ϕ
0
(t) ψ
0
(t) ω
0
(t)
¤
T
.
(f ◦ r) (t) =
f
x
(ϕ(t), ψ(t), ω(t))
f
y
(ϕ(t), ψ(t), ω(t))
f
z
(ϕ(t), ψ(t), ω(t))
.
P (t) = hf ◦ r, r
0
i(t)
A =
t
2
Z
t
1
P (t) dt =
t
2
Z
t
1
hf ◦ r, r
0
i(t) dt =
=
t
2
Z
t
1
(f
x
· ϕ
0
+ f
y
· ψ
0
+ f
z
· ω
0
) (t) dt.
f `
A B.
(`)
(B)
Z
(A)
hf, dri.
` A
B r : [α, β] → R
3
r(α) = A r(β) = B
(`)
(B)
Z
(A)
hf, dri =
β
Z
α
hf ◦ r, r
0
i.
f
x
(x, y, z) = y
2
, f
y
(x, y, z) = z
2
, f
z
(x, y, z) = x
2
z =
p
a
2
− x
2
− y
2
x
2
+ y
2
= ax a > 0
(a, 0, 0)
r : [−π/2, π/2] → R
3
; x = a·cos
2
(t), y = a·sin(t)·cos(t), z = a·|sin(t)|.
f ◦ r [−π/2, π/2] → R
3
(f ◦ r)(t) = a
2
·
£
sin
2
(t) ·cos
2
(t), sin
2
(t), cos
4
(t)
¤
T
.
r
0
(t) = a ·
£
−2cos(t) · sin(t), cos
2
(t) − sin
2
(t), sign(t) · cos(t)
¤
T
.
P (t) = hf ◦ r, r
0
i(t) = a
3
¡
−2sin
3
· cos
3
(t)+
+ sin
2
(t) ·
¡
cos
2
(t) − sin
2
(t)
¢
+ cos
5
(t) · sign(t)
¢
.
a
3
π/2
Z
−π/2
¡
−2sin
3
(t)cos
3
(t) + sin
2
(t) ·
¡
cos
2
(t) − sin
2
(t)
¢
+
+ cos
5
(t) · sign(t)
¢
dt = −πa
3
/4.
`
`
I
`
hf, dri.
A B `
U
AB
= (`)
(B)
Z
(A)
hE, dri,
E
`
e =
I
`
hE, dri.
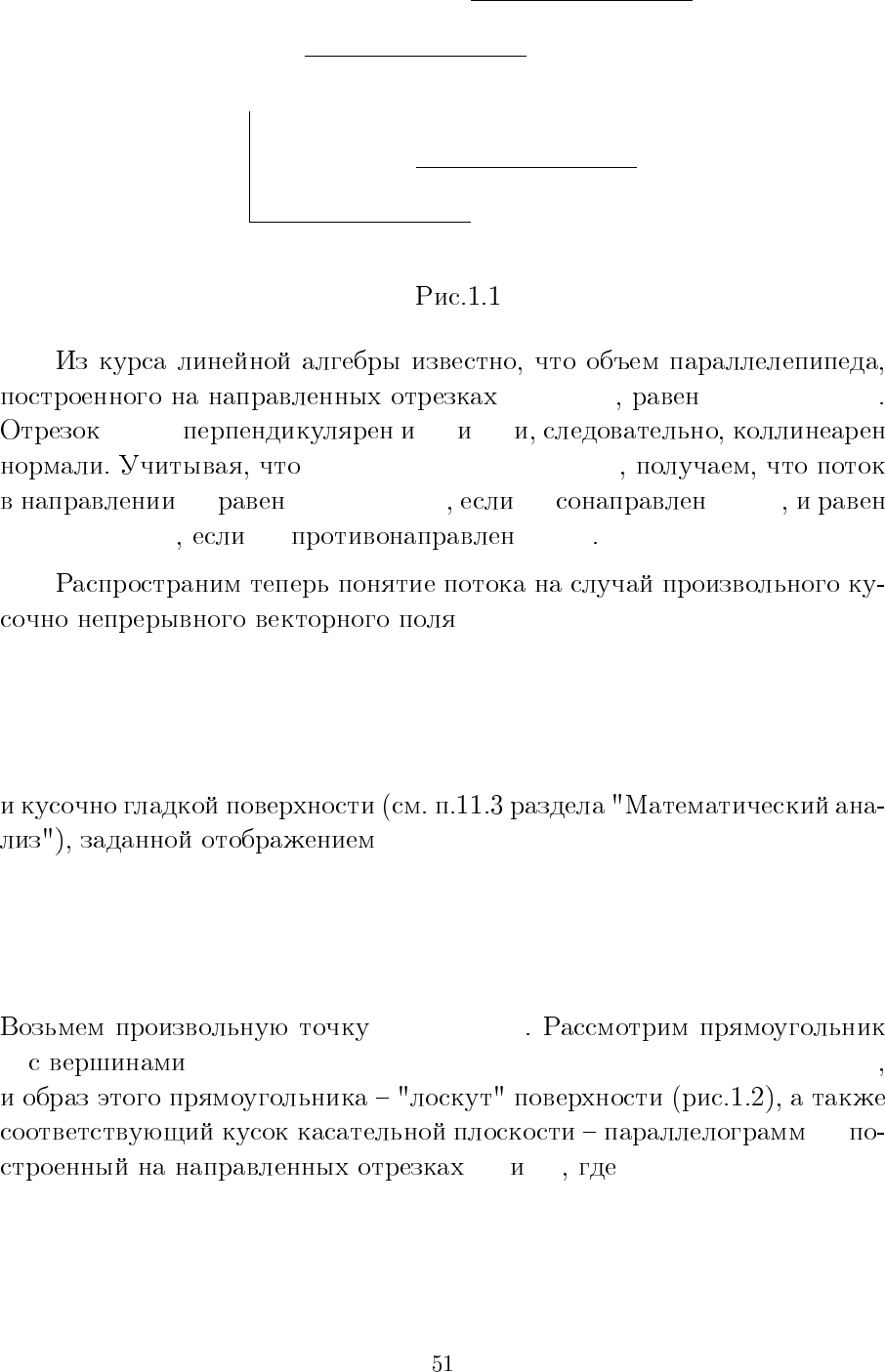
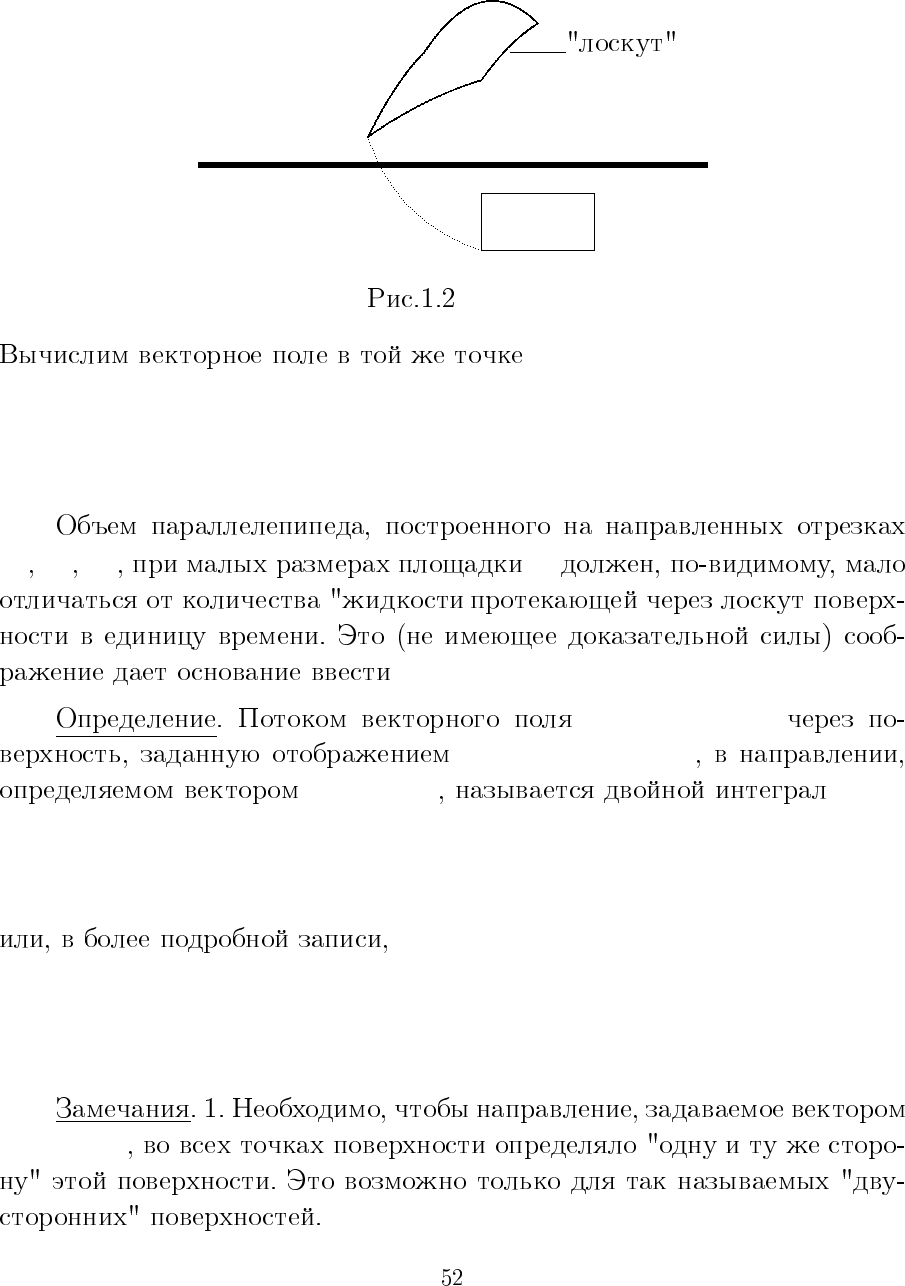
Π
−→
p
−→
q
v
Q Π
−→
p ,
−→
q ,
−→
v
Q
Π
−→
n Π
−→
n
6
-³
³
³
³
³
³
³
³
³1
£
£
£
£
£
£
£
£
£±
−→
v
−→
n
−→
p
−→
q
Π
³
³
³
³
³
³
³
³
³
£
£
£
£
£
£
£
£
£
³
³
³
³
³
³
³
³
³
£
£
£
£
£
£
£
£
£
³
³
³
³
³
³
³
³
³
£
£
£
£
£
£
£
£
£
−→
p ,
−→
q ,
−→
v |det ([v, p , q]) |
−−−→
p × q
−→
p
−→
q
det ([v, p, q]) = hv, p × qi
−→
n det ([v, p , q])
−→
n
−−−→
p × q
−det ([v, p, q])
−→
n
−−−→
p × q
f : R
3
→ R
3
x
y
z
f
−→
f
x
(x, y, z)
f
y
(x, y, z)
f
z
(x, y, z)
r : G ⊂ R
2
→ R
3
·
u
v
¸
r
−→
x = ϕ(u, v)
y = ψ(u, v)
z = ω(u, v)
.
(u
0
, v
0
) ∈ G
Ω (u
0
, v
0
), (u
0
+ ∆u, v
0
), (u
0
, v
0
+ ∆v), (u
0
+ ∆u, v
0
+ ∆v)
Π,
−→
p
−→
q
p = D
1
r·∆u =
D
1
ϕ(u
0
, v
0
)
D
1
ψ(u
0
, v
0
)
D
1
ω(u
0
, v
0
)
·∆u, q = D
2
r·∆v =
D
2
ϕ(u
0
, v
0
)
D
2
ψ(u
0
, v
0
)
D
2
ω(u
0
, v
0
)
·∆v.
Π
Ω
u
u
(u
0
, v
0
)
r(u
0
, v
0
)
−→
f
−→
p
−→
q
½
½
½
½
½
½
¢
¢
¢
¢
¢
¢
¢
¢
¢
¾
A
A
A
A
A
A
A
A
AK
½
½
½
½
½
½>
¢
¢
¢
¢
¢
¢
¢
¢
¢¸
R
3
R
2
(f ◦ r)(u
0
, v
0
) =
f
x
(ϕ(u
0
, v
0
), ψ(u
0
, v
0
), ω(u
0
, v
0
))
f
y
(ϕ(u
0
, v
0
), ψ(u
0
, v
0
), ω(u
0
, v
0
))
f
z
(ϕ(u
0
, v
0
), ψ(u
0
, v
0
), ω(u
0
, v
0
))
.
−→
p
−→
q
−→
f Π
f : R
3
→ R
3
r : G ⊂ R
2
→ R
3
D
1
r × D
2
r
Z
G
Z
det ([f ◦ r, D
1
r, D
2
r])
Z
G
Z
det
f
x
(ϕ(u, v), ϕ(u, v), ω(u, v)) D
1
ϕ(u, v) D
2
ϕ(u, v)
f
y
(ϕ(u, v), ψ(u, v), ω(u, v)) D
1
ψ(u, v) D
2
ψ(u, v)
f
z
(ϕ(u, v), ψ(u, v), ω(u, v)) D
1
ω(u, v) D
2
ω(u, v)
dudv.
D
1
r ×D
2
r
f S
R
S
R
hf, dSi.
f
x
(x, y, z) = x
2
, f
y
(x, y, z) = y
2
, f
z
(x, y, z) = z
2
x
2
+ y
2
+ z
2
= 1
x = sin(θ) · cos(ϕ), y = sin(θ) · sin(ϕ), z = cos(θ);
0 ≤ θ ≤ π/2, 0 ≤ ϕ ≤ π/2.
(f ◦ r)(θ, ϕ) =
£
sin
2
(θ) · cos
2
(ϕ), sin
2
(θ) · sin
2
(ϕ), cos
2
(θ)
¤
T
.
D
θ
r(θ, ϕ) = [cos(θ) · cos(ϕ), cos(θ) · sin(ϕ), −sin(θ)]
T
;
D
ϕ
r(θ, ϕ) = [−sin(θ) · sin(ϕ), sin(θ) · cos(ϕ), 0]
T
.
D
θ
r ×D
ϕ
r
det ([f ◦ r, D
θ
r, D
ϕ
r]) =
= det
sin
2
(θ) · cos
2
(ϕ) cos(θ) · cos(ϕ) −sin(θ) · sin(ϕ)
sin
2
(θ) · sin
2
(ϕ) cos(θ) · sin(ϕ) sin(θ) · cos(ϕ)
cos
2
(θ) −sin(θ) 0
=
= sin(θ) ·
¡
cos
3
(θ) + sin
3
(θ) ·
¡
cos
3
(ϕ) + sin
3
(ϕ)
¢¢
.
π/2
Z
0
sin(θ)dθ
π/2
Z
0
³
cos
3
(θ) + sin
3
(θ) ·
¡
cos
3
(ϕ) + sin
3
(ϕ)
¢
´
dϕ = 3π/8.
D
θ
r×D
ϕ
r
(−1)
f : R
3
→ R
3
[x, y, z]
T
f
−→ [f
x
, f
y
, f
z
]
T
.
S V
f
1
= [f
x
, 0, 0]
T
, f
2
= [0, f
y
, 0]
T
, f
3
= [0, 0, f
z
]
T
,
f = f
1
+ f
2
+ f
3
Z
S
Z
hf, dSi =
Z
S
Z
hf
1
, dSi +
Z
S
Z
hf
2
, dSi +
Z
S
Z
hf
3
, dSi.
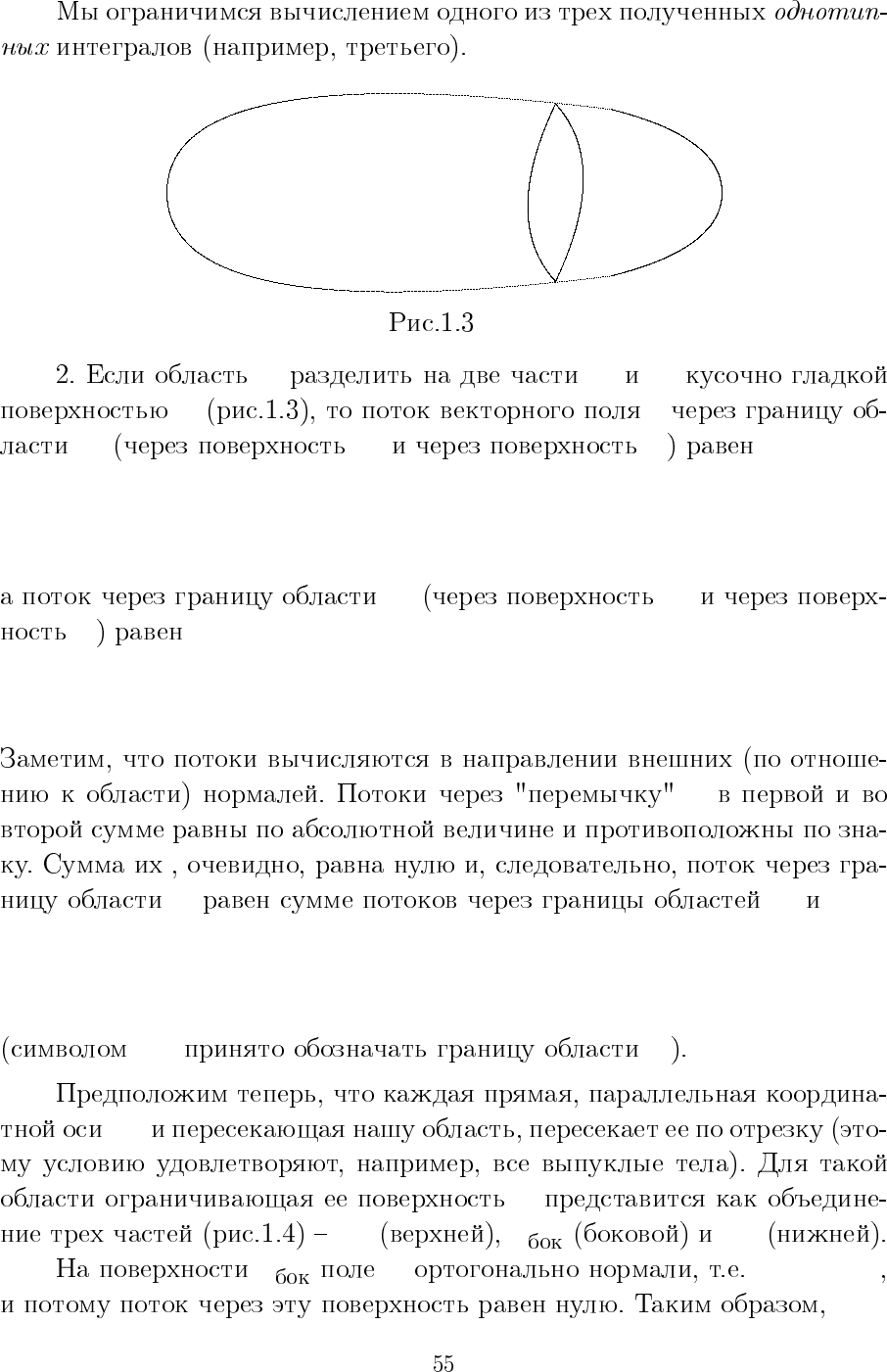
V
1
Σ V
2
S
1
S
2
V V
1
V
2
Σ f
V
1
S
1
Σ
Z
S
1
Z
hf, dSi +
Z
Σ
Z
hf, dSi,
V
2
S
2
Σ
Z
S
2
Z
hf, dSi +
Z
Σ
Z
hf, dSi.
Σ
V V
1
V
2
:
Z
∂
Z
V
hf, dSi =
Z
∂
Z
V
1
hf, dSi +
Z
∂
Z
V
2
hf, dSi
∂V V
Oz
S
S
B
S S
H
S f
3
hf
3
, ni = 0
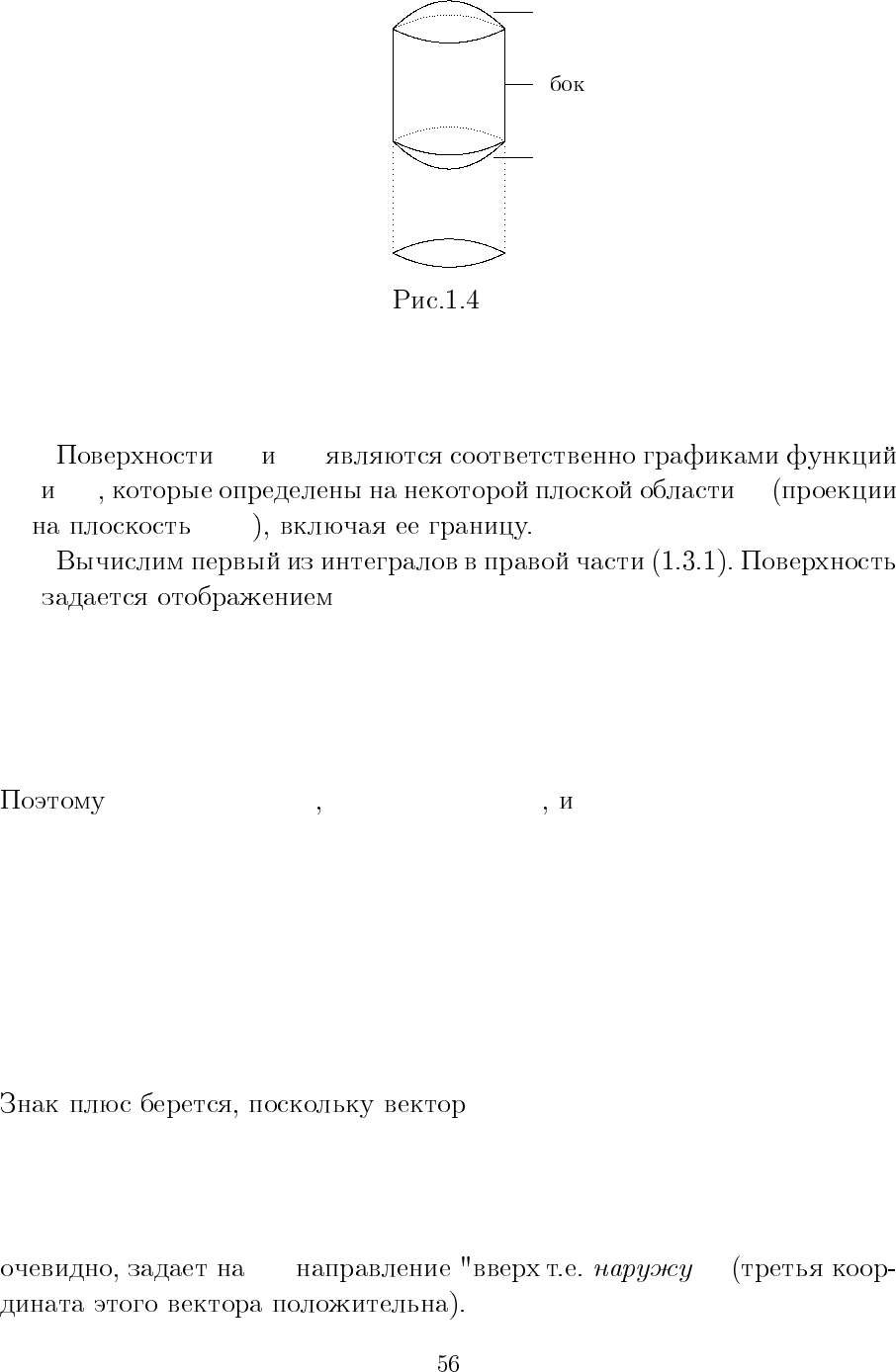
∆
¾ S
H
: z = ω
H
(x, y)
¾ S
B
: z = ω
B
(x, y)
¾ S
Z
S
Z
hf
3
, dSi =
Z
S
B
Z
hf
3
, dSi +
Z
S
H
Z
hf
3
, dSi. (1.3.1)
S
B
S
H
ω
B
ω
H
∆
V xOy
S
B
r
1
: ∆ → R
3
·
x
y
¸
r
1
−→
x
y
ω
B
(x, y)
.
D
1
r
1
=
1
0
D
1
ω
B
D
2
r
1
=
0
1
D
2
ω
B
Z
S
B
Z
hf
3
, dSi =
Z
∆
Z
det
0 1 0
0 0 1
f
z
D
1
ω
B
D
2
ω
B
dxdy =
=
Z
∆
Z
f
z
(x, y, ω
B
(x, y)) dxdy.
D
1
r
1
× D
2
r
1
=
−D
1
ω
B
−D
2
ω
B
1
,
S
B
V