Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

8
-16 Robotics and Automation Handbook
X
5
Z
5
Y
5
Y
4
Y
3
Z
3
X
3
X
2
X
0
Y
0
Y
1
X
1
Z
1
Z
0
Y
2
Z
2
X
4
Z
4
Z
7
Z
6
X
6
Y
6
X
7
Y
7
BASE
q
4
q
2
q
1
q
6
q
7
q
5
q
3
d
3
d
5
d
7
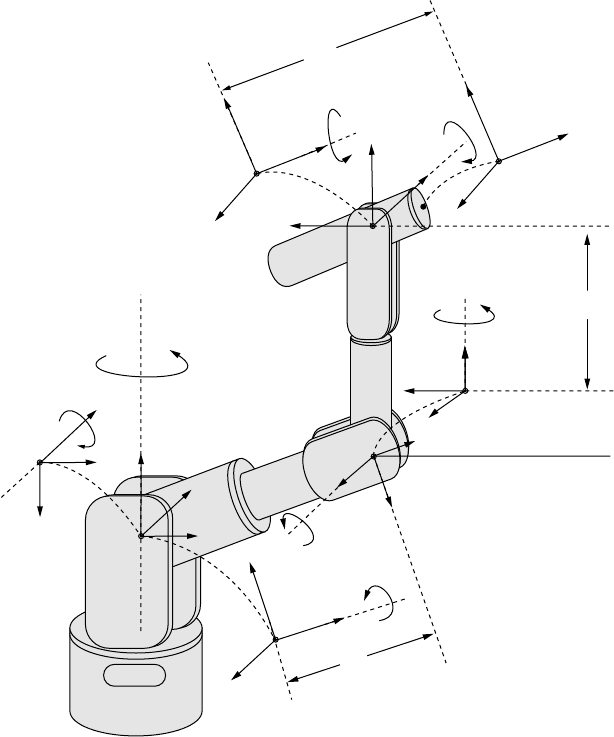
FIGURE 8.9 Schematic of the Mitsubishi PA-10 robot arm.
Having established the coordinate frames, the next step is to determine the D-H parameters. We begin
by first determining α
i
. α
i
is the rotation about X
i
to make Z
i−1
parallel with Z
i
. For axis 1, the rotation
about X
1
to make Z
0
parallel with Z
1
is −90
◦
or −π/2 radians. For axis 2, the rotation about X
2
to make
Z
1
parallel with Z
2
is −90
◦
or −π/2 radians. α
3
through α
6
are determined in the same manner. α
7
is zero
because Z
7
is parallel with Z
6
.
The next step is to determine a
i
and d
i
. a
i
is the link length and always points away from the Z
i−1
axis.
d
i
is the offset and is always along the Z
i−1
axis. In the case of the Mitsubishi PA-10 robot arm, there are
no link lengths so a
1
through a
7
are equal to zero. As seen from the schematic of the Mitsubishi arm, the
only nonzero link offsets, d
i
’s D-H parameters are d
3
, d
5
, and d
7
.
Having determined all the D-H parameters, the transformation matrix A
0
7
can now be computed.
The transformation matrix consists of the rotation matrix R
0
7
and the displacement vector d
0
7
. Using the
expression in Equation (8.24) and Equation (8.25) we get:
R
0
7
= (U
1
V
1
)(U
2
V
2
)(U
3
V
3
)(U
4
V
4
)(U
5
V
5
)(U
6
V
6
)(U
7
V
7
) (8.41)
d
0
7
=U
1
s
1
+ (U
1
V
1
)U
2
s
2
+ (U
1
V
1
)(U
2
V
2
)U
3
s
3
+ (U
1
V
1
)(U
2
V
2
)(U
3
V
3
)U
4
s
4
+(U
1
V
1
)(U
2
V
2
)(U
3
V
3
)(U
4
V
4
)U
5
s
5
+ (U
1
V
1
)(U
2
V
2
)(U
3
V
3
)(U
4
V
4
)(U
5
V
5
)U
6
s
6
+(U
1
V
1
)(U
2
V
2
)(U
3
V
3
)(U
4
V
4
)(U
5
V
5
)(U
6
V
6
)U
7
s
7
(8.42)
Copyright © 2005 by CRC Press LLC
D-H Convention 8
-17
The following matrices are the individual U and V matrices for each axis of the manipulator.
U
1
=
cos(θ
1
) −sin(θ
1
)0
sin(θ
1
) cos(θ
1
)0
001
, V
1
=
100
001
0 −10
U
2
=
cos(θ
2
) −sin(θ
2
)0
sin(θ
2
) cos(θ
2
)0
001
, V
2
=
100
001
0 −10
U
3
=
cos(θ
3
) −sin(θ
3
)0
sin(θ
3
) cos(θ
3
)0
001
, V
3
=
10 0
00−1
01 0
U
4
=
cos(θ
4
) −sin(θ
4
)0
sin(θ
4
) cos(θ
4
)0
001
, V
4
=
10 0
00−1
01 0
U
5
=
cos(θ
5
) −sin(θ
5
)0
sin(θ
5
) cos(θ
5
)0
001
, V
5
=
10 0
00−1
01 0
U
6
=
cos(θ
6
) −sin(θ
6
)0
sin(θ
6
) cos(θ
6
)0
001
, V
6
=
100
001
0 −10
U
7
=
cos(θ
7
) −sin(θ
7
)0
sin(θ
7
) cos(θ
7
)0
001
, V
7
=
100
010
001
Similarly the s
i
vector is given by
s
1
=
0
0
0
, s
2
=
0
0
0
, s
3
=
0
0
d
3
, s
4
=
0
0
0
, s
5
=
0
0
d
5
, s
6
=
0
0
0
, s
7
=
0
0
d
7
Substituting the above U
i
, V
i
, and s
i
into Equation (8.41) and Equation (8.42) we get the following,
where C
i
= cos(i) and S
i
= sin(i):
R
0
7
=
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
(8.43)
r
11
= ((((C
1
C
2
C
3
+ S
1
S
3
)C
4
−C
1
S
2
S
4
)C
5
+ (C
1
C
2
S
3
− S
1
C
3
)S
5
)C
6
+ ((C
1
C
2
C
3
+ S
1
S
3
)S
4
+C
1
S
2
C
4
)S
6
)C
7
+ (−((C
1
C
2
C
3
+ S
1
S
3
)C
4
−C
1
S
2
S
4
)S
5
+ (C
1
C
2
S
3
− S
1
C
3
)C
5
)S
7
r
12
=−((((C
1
C
2
C
3
+ S
1
S
3
)C
4
−C
1
S
2
S
4
)C
5
+ (C
1
C
2
S
3
− S
1
C
3
)S
5
)C
6
+ ((C
1
C
2
C
3
+ S
1
S
3
)S
4
+C
1
S
2
C
4
)S
6
)S
7
+ (−((C
1
C
2
C
3
+ S
1
S
3
)C
4
−C
1
S
2
S
4
)S
5
+ (C
1
C
2
S
3
− S
1
C
3
)C
5
)C
7
r
13
=−(((C
1
C
2
C
3
+ S
1
S
3
)C
4
−C
1
S
2
S
4
)C
5
+ (C
1
C
2
S
3
− S
1
C
3
)S
5
)S
6
+ ((C
1
C
2
C
3
+ S
1
S
3
)S
4
+C
1
S
2
C
4
)C
6
r
21
= ((((S
1
C
2
C
3
−C
1
S
3
)C
4
− S
1
S
2
S
4
)C
5
+ (S
1
C
2
S
3
+C
1
C
3
)S
5
)C
6
+ ((S
1
C
2
C
3
−C
1
S
3
)S
4
+S
1
S
2
C
4
)S
6
)C
7
+ (−((S
1
C
2
C
3
−C
1
S
3
)C
4
− S
1
S
2
S
4
)S
5
+ (S
1
C
2
S
3
+C
1
C
3
)C
5
)S
7
Copyright © 2005 by CRC Press LLC
8
-18 Robotics and Automation Handbook
r
22
=−((((S
1
C
2
C
3
−C
1
S
3
)C
4
− S
1
S
2
S
4
)C
5
+ (S
1
C
2
S
3
+C
1
C
3
)S
5
)C
6
+ ((S
1
C
2
C
3
−C
1
S
3
)S
4
+S
1
S
2
C
4
)S
6
)S
7
+ (−((S
1
C
2
C
3
−C
1
S
3
)C
4
− S
1
S
2
S
4
)S
5
+ (S
1
C
2
S
3
+C
1
C
3
)C
5
)C
7
r
23
=−(((S
1
C
2
C
3
−C
1
S
3
)C
4
− S
1
S
2
S
4
)C
5
+ (S
1
C
2
S
3
+C
1
C
3
)S
5
)S
6
+ ((S
1
C
2
C
3
−C
1
S
3
)S
4
+S
1
S
2
C
4
)C
6
r
31
= (((−S
2
C
3
C
4
−C
2
S
4
)C
5
− S
2
S
3
S
5
)C
6
+ (−S
2
C
3
S
4
+C
2
C
4
)S
6
)C
7
+ (−(−S
2
C
3
C
4
−C
2
S
4
)S
5
−S
2
S
3
C
5
)S
7
r
32
=−(((−S
2
C
3
C
4
−C
2
S
4
)C
5
− S
2
S
3
S
5
)C
6
+ (−S
2
C
3
S
4
+C
2
C
4
)S
6
)S
7
+ (−(−S
2
C
3
C
4
−C
2
S
4
)S
5
−S
2
S
3
C
5
)C
7
r
33
=−((−S
2
C
3
C
4
−C
2
S
4
)C
5
− S
2
S
3
S
5
)S
6
+ (−S
2
C
3
S
4
+C
2
C
4
)C
6
d
0
7
=
d
11
d
21
d
31
(8.44)
d
11
=−C
1
S
2
d
3
+ ((C
1
C
2
C
3
+ S
1
S
3
)S
4
+C
1
S
2
C
4
)d
5
+ (−(((C
1
C
2
C
3
+ S
1
S
3
)C
4
−C
1
S
2
S
4
)C
5
+(C
1
C
2
S
3
− S
1
C
3
)S
5
)S
6
+ ((C
1
C
2
C
3
+ S
1
S
3
)S
4
+C
1
S
2
C
4
)C
6
)d
7
d
21
=−S
1
S
2
d
3
+ ((S
1
C
2
C
3
−C
1
S
3
)S
4
+ S
1
S
2
C
4
)d
5
+ (−(((S
1
C
2
C
3
−C
1
S
3
)C
4
− S
1
S
2
S
4
)C
5
+(S
1
C
2
S
3
+C
1
C
3
)S
5
)S
6
+ ((S
1
C
2
C
3
−C
1
S
3
)S
4
+ S
1
S
2
C
4
)C
6
)d
7
d
31
=−C
2
d
3
+ (−S
2
C
3
S
4
+C
2
C
4
)d
5
+ (−((−S
2
C
3
C
4
−C
2
S
4
)C
5
− S
2
S
3
S
5
)S
6
+(−S
2
C
3
S
4
+C
2
C
4
)C
6
)d
7
The transformation matrix is now given by
A
0
7
=
R
0
7
d
0
7
000
1
(8.45)
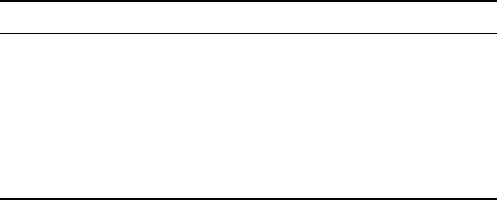
Example 8.5: The PUMA 600 Robot Arm
The PUMA 600 has six revolute joints giving it six degrees of freedom. The motion of the arm is controlled
by six brushed DC servo motors (see Figure 8.10 and Table 8.4). The first step in determining the D-H
parameters is to locate the joints of the robot arm manipulator and determine if the joint is prismatic
or revolute. There are six joints in the PUMA 600. All of them are revolute joints so θ
i
of each joint is
variable. Starting from the base, the joint coordinate frames are assigned based on the algorithm outlined
before.
Having established the coordinate frames, the next step is to determine the D-H parameters. We
begin by first determining α
i
. α
i
is the rotation about X
i
to make Z
i−1
parallel with Z
i
. The rotation
TABLE 8.4 D-H Parameters for the PUMA 600
No. Twist Angle α
i
Link Length a
i
Link Offset d
i
Joint Angle θ
i
1
(0−1)
π/20 0θ
Va ri ab le
1
2
(1−2)
0 a
2
d
2
θ
Va ri ab le
2
3
(2−3)
−π/2 0 0 θ
Va ri ab le
3
4
(3−4)
π/20 d
4
θ
Va ri ab le
4
5
(4−5)
π/20 0θ
Va ri ab le
5
6
(5−6)
00d
6
θ
Va ri ab le
6
Copyright © 2005 by CRC Press LLC
D-H Convention 8
-19
X
0
Y
6
X
6
Z
6
X
3
d
6
a
2
q
3
d
2
Z
1
X
1
Y
1
Y
0
Z
0
Z
3
X
2
Y
4
X
5
Y
5
Z
5
Z
4
Y
3
d
4
q
2
q
4
q
5
q
6
q
1
X
4
Z
2
Y
2
FIGURE 8.10 Schematic of the PUMA 600 robot arm.
about X
1
to take Z
0
parallel to Z
1
is π/2. α
2
through α
6
can be determined by following the same
procedure.
The next step is to determine a
i
and d
i
. a
i
is the link length and always points away from the Z
i−1
axis.
d
i
is the offset and is always along the Z
i−1
axis. For axis 1, there is no offset between joint 1 and joint 2
and no distance between axes 1 and 2, so d
1
and a
1
are zero. There is no offset between joint 2 and joint 3
as well as joint 3 and joint 4, so d
i
is equal to zero. The only link length is between axes 2 and 3 and the
distance is equal to a
2
. The other offsets between joints are between axes 3 and 4, and axes 5 and 6. The
offsets are equal to d
4
and d
6
, respectively.
Having determined all the D-H parameters, the transformation matrix A
0
6
can now be computed.
The transformation matrix consists of the rotation matrix R
0
6
and the displacement vector d
0
6
. Using the
Copyright © 2005 by CRC Press LLC
8
-20 Robotics and Automation Handbook
expression in Equation (8.24) and Equation (8.25) we get
R
0
6
= (U
1
V
1
)(U
2
V
2
)(U
3
V
3
)(U
4
V
4
)(U
5
V
5
)(U
6
V
6
) (8.46)
d
0
6
=U
1
s
1
+ (U
1
V
1
)U
2
s
2
+ (U
1
V
1
)(U
2
V
2
)U
3
s
3
+ (U
1
V
1
)(U
2
V
2
)(U
3
V
3
)U
4
s
4
+(U
1
V
1
)(U
2
V
2
)(U
3
V
3
)(U
4
V
4
)U
5
s
5
+ (U
1
V
1
)(U
2
V
2
)(U
3
V
3
)(U
4
V
4
)(U
5
V
5
)U
6
s
6
(8.47)
The following matrices are the individual U and V matrices for each axis of the manipulator.
U
1
=
cos(θ
1
) −sin(θ
1
)0
sin(θ
1
) cos(θ
1
)0
001
, V
1
=
10 0
00−1
01 0
U
2
=
cos(θ
2
) −sin(θ
2
)0
sin(θ
2
) cos(θ
2
)0
001
, V
2
=
100
010
001
U
3
=
cos(θ
3
) −sin(θ
3
)0
sin(θ
3
) cos(θ
3
)0
001
, V
3
=
100
001
0 −10
U
4
=
cos(θ
4
) −sin(θ
4
)0
sin(θ
4
) cos(θ
4
)0
001
, V
4
=
10 0
00−1
01 0
U
5
=
cos(θ
5
) −sin(θ
5
)0
sin(θ
5
) cos(θ
5
)0
001
, V
5
=
10 0
00−1
01 0
U
6
=
cos(θ
6
) −sin(θ
6
)0
sin(θ
6
) cos(θ
6
)0
001
, V
6
=
100
010
001
Similarly the s
i
vector is given by
s
1
=
0
0
0
, s
2
=
a
2
0
d
2
, s
3
=
0
0
0
, s
4
=
0
0
d
4
, s
5
=
0
0
0
, s
6
=
0
0
d
6
Substituting the above U
i
, V
i
, and s
i
into Equation (8.46) and Equation (8.47), we get the following where
C
a
= cos(a) and S
a
= sin(a).
R
0
6
=
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
(8.48)
Copyright © 2005 by CRC Press LLC
D-H Convention 8
-21
r
11
= (((C
1
C
2
C
3
−C
1
S
2
S
3
)C
4
− S
1
S
4
)C
5
+ (−C
1
C
2
S
3
−C
1
S
2
C
3
)S
5
)C
6
+ ((C
1
C
2
C
3
−C
1
S
2
S
3
)S
4
+S
1
C
4
)S
6
r
12
=−(((C
1
C
2
C
3
−C
1
S
2
S
3
)C
4
− S
1
S
4
)C
5
+ (−C
1
C
2
S
3
−C
1
S
2
C
3
)S
5
)S
6
+ ((C
1
C
2
C
3
−C
1
S
2
S
3
)S
4
+S
1
C
4
)C
6
r
13
= ((C
1
C
2
C
3
−C
1
S
2
S
3
)C
4
− S
1
S
4
)S
5
− (−C
1
C
2
S
3
−C
1
S
2
C
3
)C
5
r
21
= (((S
1
C
2
C
3
− S
1
S
2
S
3
)C
4
+C
1
S
4
)C
5
+ (−S
1
C
2
S
3
− S
1
S
2
C
3
)S
5
)C
6
+ ((S
1
C
2
C
3
− S
1
S
2
S
3
)S
4
−C
1
C
4
)S
6
r
22
=−(((S
1
C
2
C
3
− S
1
S
2
S
3
)C
4
+C
1
S
4
)C
5
+ (−S
1
C
2
S
3
− S
1
S
2
C
3
)S
5
)S
6
+ ((S
1
C
2
C
3
− S
1
S
2
S
3
)S
4
−C
1
C
4
)C
6
r
23
= ((S
1
C
2
C
3
− S
1
S
2
S
3
)C
4
+C
1
S
4
)S
5
− (−S
1
C
2
S
3
− S
1
S
2
C
3
)C
5
r
31
= ((S
2
C
3
+C
2
S
3
)C
4
C
5
+ (−S
2
S
3
+C
2
C
3
)S
5
)C
6
+ (S
2
C
3
+C
2
S
3
)S
4
S
6
r
32
=−((S
2
C
3
+C
2
S
3
)C
4
C
5
+ (−S
2
S
3
+C
2
C
3
)S
5
)S
6
+ (S
2
C
3
+C
2
S
3
)S
4
C
6
r
33
= (S
2
C
3
+C
2
S
3
)C
4
S
5
− (−S
2
S
3
+C
2
C
3
)C
5
d
0
6
=
d
11
d
21
d
31
(8.49)
d
11
=C
1
C
2
a
2
+ S
1
d
2
+ (−C
1
C
2
S
3
−C
1
S
2
C
3
)d
4
+ (((C
1
C
2
C
3
−C
1
S
2
S
3
)C
4
− S
1
S
4
)S
5
−(−C
1
C
2
S
3
−C
1
S
2
C
3
)C
5
)d
6
d
21
= S
1
C
2
a
2
−C
1
d
2
+ (−S
1
C
2
S
3
− S
1
S
2
C
3
)d
4
+ (((S
1
C
2
C
3
− S
1
S
2
S
3
)C
4
+C
1
S
4
)S
5
−(−S
1
C
2
S
3
− S
1
S
2
C
3
)C
5
)d
6
d
31
= S
2
a
2
+ (−S
2
S
3
+C
2
C
3
)d
4
+ ((S
2
C
3
+C
2
S
3
)C
4
S
5
− (−S
2
S
3
+C
2
C
3
)C
5
)d
6
The final transformation matrix is
A
0
6
=
R
0
6
d
0
6
000
1
(8.50)
Copyright © 2005 by CRC Press LLC

9
Trajectory Planning
for Flexible Robots
William E. Singhose
Georgia Institute of Technology
9.1 Introduction
9.2 Command Generation
Bridge Crane Example
•
Generating Zero Vibration
Commands
•
Using Zero-Vibration Impulse Sequences
to Generate Zero-Vibration Commands
•
Robustness
to Modeling Errors
•
Multi-Mode Input Shaping
•
Real-Time Implementation
•
Applications
•
Extensions
Beyond Vibration Reduction
9.3 Feedforward Control Action
Feedforward Control of a Simple System with Time Delay
•
Feedforward Control of a System with Nonlinear Friction
•
Zero Phase Error Tracking Control
•
Conversion of
Feedforward Control to Command Shaping
9.4 Summary
9.1 Introduction
When a robotic system is pushed to its performance limits in terms of motion velocity and throughput,
the problem of flexibility usually arises. Flexibility comes from physical deformation of the structure or
compliance introduced by the feedback control system. For example, implementing a proportional and
derivative (PD) controller is analogous to adding a spring and damper to the system. The controller
“spring” can lead to problematic flexibility in the system. Deformation of the structure can occur in the
links, cables, and joints. This can lead to problems with positioning accuracy, trajectory following, settling
time, component wear, and stability and may also introduce nonlinear dynamics if the deflections are
large.
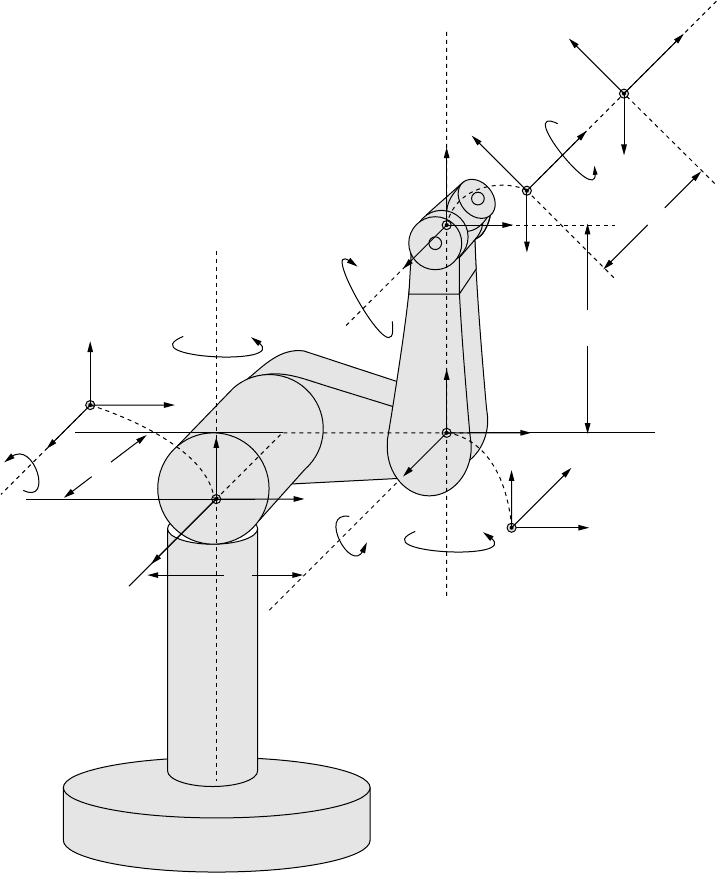
An example of a robot whose flexibility is obviously detrimental to its positioning accuracy is the long-
reach manipulator sketched in Figure 9.1. This robotic arm was built to test methods for cleaning nuclear
waste storage tanks [1]. The arm needs to enter a tank through an access hole and then reach long distances
to clean the tank walls. These types of robots have mechanical flexibility in the links, the joints, and possibly
the base to which they are attached. Both the gross motion of the arm and the cleaning motion of the
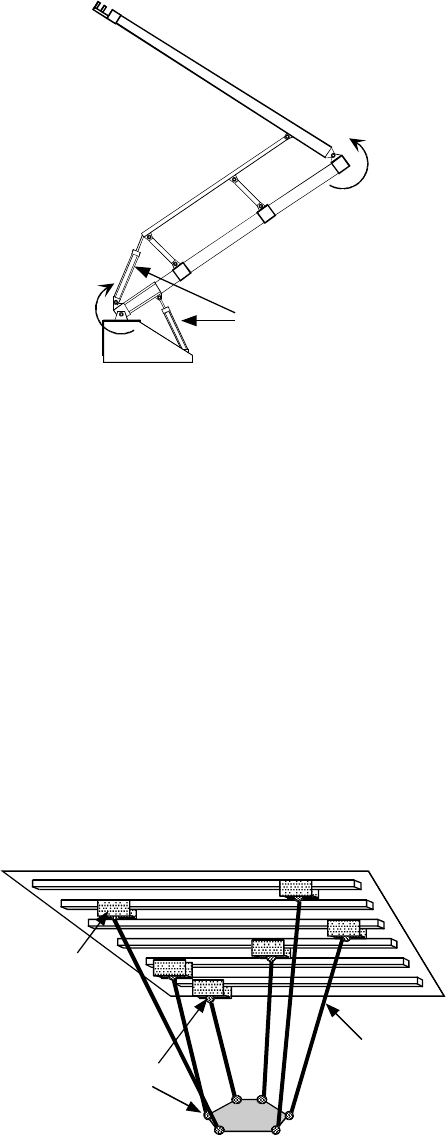
end effector can induce vibration. An example of a less conventional flexible positioning system is the
cable-driven “Hexaglide” shown in Figure 9.2 [2]. This system is able to perform six-degrees-of-freedom
positioning by sliding the cable support points along overhead rails.
The cables present in the Hexaglide make its flexibility obvious. However, all robotic systems will deflect
if they are moved rapidly enough. Consider the moving-bridge coordinate measuring machine (CMM)
Copyright © 2005 by CRC Press LLC
9
-2 Robotics and Automation Handbook
Hydraulic
Actuators
End Effector
q
1
q
2
FIGURE 9.1 Long reach manipulator RALF.
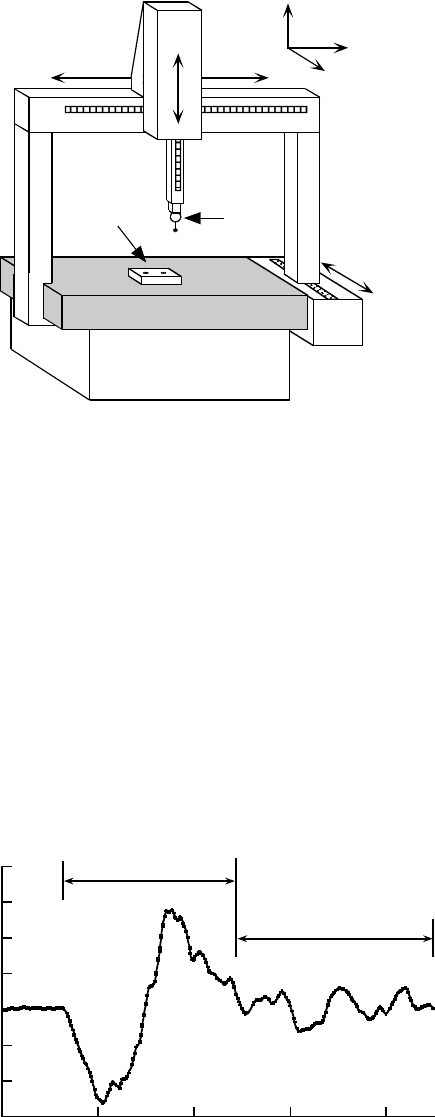
sketched in Figure 9.3. The machine is composed of stiff components including a granite base and large
cross-sectional structural members. The goal of the CMM is to move a probe throughout its workspace
so that it can contact the surface of manufactured parts that are fixed to the granite base. In this way it
can accurately determine the dimensions of the part. The position of the probe is measured by optical
encoders that are attached to the granite base and the moving bridge. However, if a laser interferometer is
used to measure the probe, its location will differ from that indicated by the encoders. This difference arises
because the physical structure deflects between the encoders and the probe endpoint. Figure 9.4 shows the
micron-level deflection for a typical move where the machine rapidly approaches a part’s surface and then
slows down just before making contact with the part [3]. If the machine is attempting to measure with
micron resolution, then the 20–25 µm vibration during the approach phase is problematic.
Flexibility introduced by the control system is also commonplace. Feedback control works by detecting
a difference between the actual response and the desired response. This difference is then used to generate
a corrective action that mimics a restoring force. In many cases this restoring force acts something like a
spring. Increasing the gains may have the effect of stiffening the system to combat excessive compliance,
but it also increases actuator demands and noise problems and can cause instability.
Sliding
Actuators
Fixed Cable
Lengths
Positioning
Surface
Spherical
Joints
FIGURE 9.2 Hexaglide mechanism.
Copyright © 2005 by CRC Press LLC
Trajectory Planning for Flexible Robots 9
-3
x
y
z
Touch-
Trigger
Probe
Measured
Part
FIGURE 9.3 Moving-bridge coordinate measuring machine.
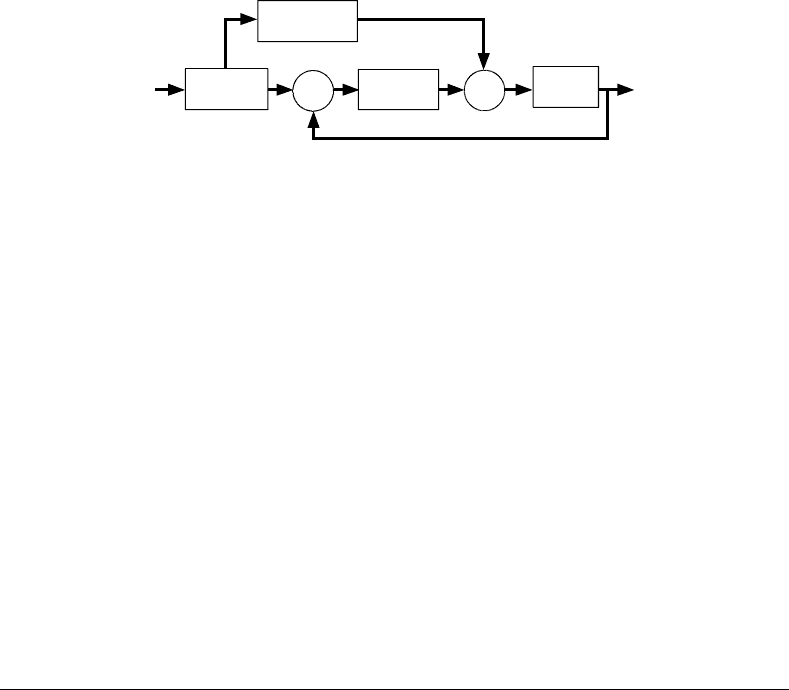
For robotic systems attempting to track trajectories, flexible dynamics from either the physical structure
or the control system cause many difficulties. If a system can be represented by the block diagram shown in
Figure 9.5, then four main components are obvious: feedback control,feedforward control, command gen-
eration, and the physical hardware. Each of the four blocks provides unique opportunities for improving
the system performance. For example, the feedback control can be designed to reject random distur-
bances, while the feedforward block cannot. On the other hand, the feedforward block can compensate for
unwanted trajectory deviations before they show up in the output, while the feedback controller cannot.
Trajectory planning for flexible robots centers on the design of the command generator and the feedfor-
ward controller. However, adequate feedback control must be in place to achieve additional performance
requirements such as disturbance rejection and steady-state positioning. Although both command gener-
ation and feedforward control can greatly aid in trajectory following, they work in fundamentally different
ways. The command generator creates a specially shaped reference command that is fed to the feedback
40
60
80
0.80 1.00 1.20
Rapid Motion
−60
−40
−20
0.0
20
0.40 0.60
Deflection (Laser-Encoder) (µm)
Time (sec)
Slow Approach
FIGURE 9.4 Deflection of coordinate measuring machine.
Copyright © 2005 by CRC Press LLC
9
-4 Robotics and Automation Handbook
Physical
Plant
Feedback
Controller
Σ
Command
Generator
Feedforward
Controller
Σ
FIGURE 9.5 Block diagram of generic system.
control loop. The actual actuator effort is then generated by the feedback controller and applied to the
plant. On the other hand, a feedforward controller injects control effort directly into the plant, thereby
aiding, or overruling, the action of the feedback control.
There is a wide range of command generators and feedforward controllers, so globally characterizing
their strengths and weaknesses is difficult. However, in general, command generators are less aggressive,
rely less on an accurate system model, and are consequently more robust to uncertainty and plant variation.
Feedforward control action can produce better trajectory tracking than command generation, but it is
usually less robust. There are also control techniques that can be implemented as command generation or
as feedforward control, so it is not always obvious at first how a control action should be characterized.
The desired motion of a robotic system is often a rapid change in position or velocity without residual
oscillation at the new setpoint. However, tracking trajectories that are complex functions of time and
space is also of prime importance for many robotic systems. For rigid multi-link serial and parallel robots,
the process of determining appropriate commands to achieve a desired endpoint trajectory can be quite
challenging and is addressed elsewhere. This chapter assumes that some baseline commands, possibly
generated from kinematic requirements, already exist. The challenge discussed here is how to modify the
commands to accommodate the flexible nature of the robotic system.
9.2 Command Generation
Creating specially shaped reference commands that move flexible systems in a desired fashion is an old
idea [4, 5, 51]. Commands can be created such that the system’s motion will cancel its own vibration.
Some of these techniques require that the commands be pre-computed using boundary conditions before
the move is initiated. Others can be implemented in real time. Another significant difference between the
various control methods is robustness to modeling errors. Some techniques require a very good system
model to work effectively, while others need only rough estimates of the system parameters.
9.2.1 Bridge Crane Example
A simple, but difficult to accurately control, flexible robotic system is an automated overhead bridge crane
like the one shown schematically in Figure 9.6. The payload is hoisted up by an overhead suspension cable.
The upper end of the cable is attached to a trolley that travels along a bridge to position the payload.
Furthermore, the bridge on which the trolley travels can also move perpendicular to the trolley motion,
thereby providing three-dimensional positioning. These cranes are usually controlled by a human operator
who presses buttons to cause the trolley to move, but there are also automated versions where a control
computer drives the motors. If the control button is depressed for a finite time period, then the trolley will
move a finite distance and come to rest. The payload on the other hand, will usually oscillate about the new
trolley position. The planar motion of the payload for a typical trolley movement is shown in Figure 9.7.
The residual payload motion is usually undesirable because the crane needs to place the payload at a
desired location. Furthermore, the payload may need to be transported through a cluttered work environ-
ment containing obstacles and human workers. Oscillations in the payload make collision-free transport
through complex trajectories much more difficult. Figure 9.8 shows an overhead view of the position of
Copyright © 2005 by CRC Press LLC