Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

26
-18 Robotics and Automation Handbook
Database
server
Ethernet
Switch
Process
HMI
Ethernet
Fieldbus
Motion Controller
Process
Controller
Process
Remote
Viewing
Life Safety System
Display Panel
HMI
Life
Safety
PLC
Area Alarms/
Alerts/
Supply shutoffs
Fieldbus +
Digital outputs
Facility Alarms & Actions
WAN/LAN
WAN/LAN
Building Safety
PLC
Chemical
Sensors
RS-422
Inputs and power relays
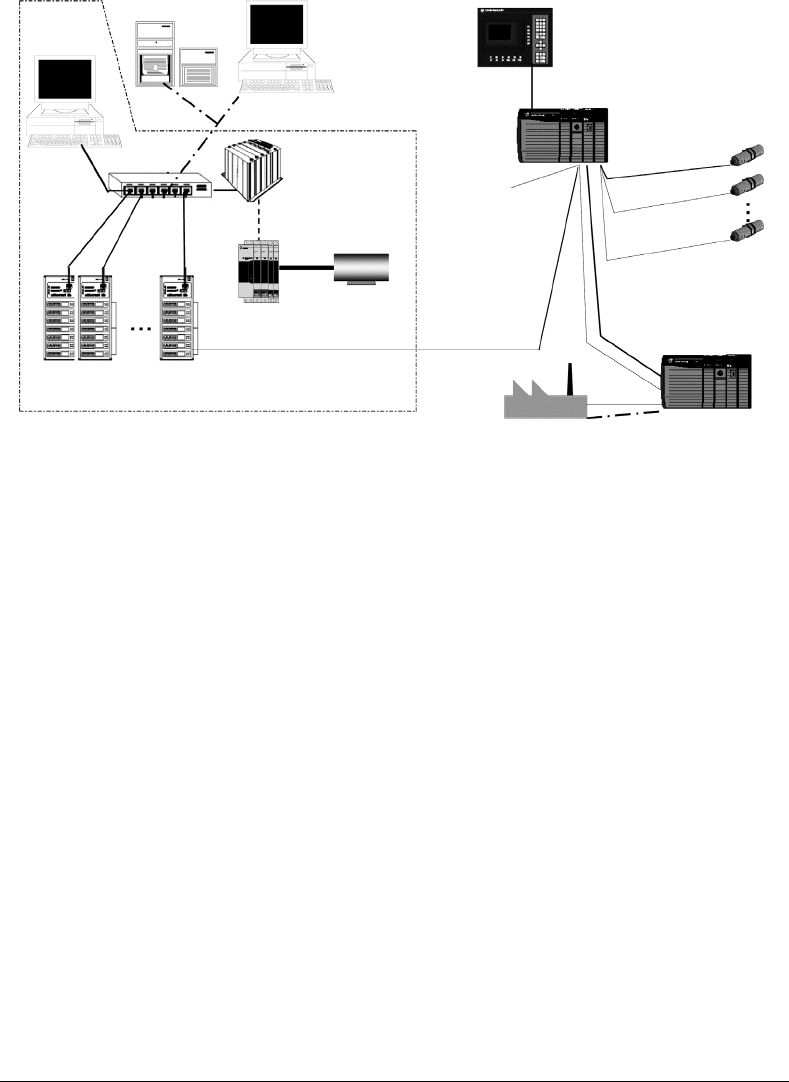
FIGURE 26.16 Chemical process control and life safety systems.
A touch screen panel HMI is provided for status of alarms (no networking is provided through the HMI).
Outputs of the LSS go to several places. In the event of a detected leak, outputs trigger alarms in the process
area, starting safety measures (e.g., exhaust fans, bells, lights), removing power from chemical supply
valves, signaling the process controller to shutdown, as well as alerting building life safety main controller
for additional actions.
The separate controls for process and safety allow flexibility in the design and operation of the process.
The process has several hundred I/O points, both analog and digital. Since this process is state-driven,
a controller and software based on flow charts (SFC) is used [∗]. Ethernet is selected as the process
control/device bus for remote I/O controllers and HMI interfaces using a switch for collision control.
While a direct parallel bus for I/O can be faster, the use of Ethernet allows for greater future system
expansion and longer distances between I/O controllers. Motion control is accomplished via a separate
(legacy) controller. Because process motions are not time critical (time constants for the process are in
terms of minutes), RS-422 serial communication between the process controller and the motion controller
is more than sufficient.
Data are recorded for batch processing locally and via data servers on the WAN/LAN. Local and remote
PC-based HMIs allow viewing and operation of the process via the Ethernet connections to the process
controller. HMI and process control software are provided from the hardware vendor in this case, yielding
an integrated approach. The local HMIs also serve a SCADA function by monitoring and recording events
and alarms.
26.10 Conclusion
This is only a brief overview of the ever-changing modern manufacturing automation. Other automation
aspects include dynamic linking of I/O point data from tag servers and database servers. These tasks
require interfacing organizations in a manufacturing enterprise. Manufacturing automation is rapidly
integrating control, manufacturing, and business functions as manufacturers pursue improvements of
products, processes, and profits in real-time.
Copyright © 2005 by CRC Press LLC
Manufacturing Automation 26
-19
References
[1] Bob Waterbury, DCS, PLC, PC, or PAS?, Control Eng., p. 12, July 2001.
[2] Geller, D.A., Programmable Controllers using the Allen-Bradley SLC-500 Family, Prentice Hall, Upper
Saddle River, NJ, 2000.
[3] Piyevsky, S., Open network and automation products, Allen-Bradley Automation Fair, Anaheim, CA,
21 November 2002.
[4] Fielder, P.J. and Schlib, C.J., Open architecture systems for robotic workcell integration, IWACT
1997 Conference Proceedings, Columbia, OH, 1997.
[5] Soft PLC Overview, URL: http://www.softplc.com/splcdata.htm.
[6] Mintchell, G.A., HMI/SCADA software-more than pretty pictures, Control Eng., 49, 18, December
2002.
[7] OPTO22 Factory Floor Software, v 3.1,D, OPTODisplay User Guide, Form 723-010216, OPTO22,
2001.
[8] Meldrum, N., ControlLogix
®
and HART protocol an integrated solution, Spectrum Controls, 2002.
[9] Fieldbuses, look before you leap, EDN, p. 197, 1998.
[10] URL: http://www.as-interface.com, 2003.
[11] Open DeviceNet Vendor Association (ODVA), URL: http://www.odva.org, 2003.
[12] Profibus International, URL: http://www.profibus.org, 2003.
[13] IEC 61158, Digital data communications for measurement and control — Fieldbus for use in in-
dustrial control systems — Part 1: Overview and guidance, IEC, Geneva, 2003.
[14] ControlNet International, URL: http://www.controlnet.org, 2003.
[15] Foundation fieldbus, http://www.fieldbus.org, 2003.
[16] Lee, K.C. and Lee, S., “Performance evaluation of switched Ethernet for real-time industrial com-
munications,” Computer Standards Interfaces, vol. 24, no. 5, pp. 411–423, November 2002.
[17] IEC 61131-3, Programmable controllers — Part 3: Programming languages, IEC, Geneva, 2003.
[18] IEC 61508-1, Functional safety of electrical/electronic/programmable electronic safety-related sys-
tems — Part 1, IEC, Geneva, 1998.
[19] ANSI/ISA-S84.01-1996, Application of safety instrumented systems for the process industries, In-
strument Society of America S84.01 Standard, Research Triangle Park, NC 27709, February 1996.
Copyright © 2005 by CRC Press LLC

Index
A
A465, 11-4
AABB, 23-18
ABB, 1-8
Abb
´
e error (sine error), 13-5f
Abb
´
e principle, 13-4–5
Absolute coordinates
of vector x, 2-3
Absolute coordinate system, 20-3f
Absolute encoders, 12-3
example, 12-3f
Acceleration control for payload limits, 11-18
Accelerations, 4-9, 12-9–10
of center of mass, 4-6
online reconstruction of, 14-9–10
Acceptance procedures, 10-2
Accuracy, 13-3f
definition of, 13-2–3
AC&E’s CimStation Robotics, 21-7, 21-8
ACS, 24-36f, 24-37f
Active touch, 23-9, 23-11
Activity of force F, 6-4
Activity principle, 6-4
Actuator forces, 19-2f
Actuators, 12-12–18, 13-17
ADAMS
Kane’s method, 6-27
Adaptive command shaping (ACS), 24-36f, 24-37f
Adaptive feedback linearization, 17-16–18
Adjoint
Jacobian matrices, 2-12
Adjoint transformation, 5-3
Admittance regulation
vs. impedance, 19-9–10
Advanced feedback control schemes, 24-29–31
with observers, 24-30–31
obstacles and objectives, 24-29–30
passive controller design with tip position feedback,
24-31
sliding mode control, 24-31
strain and strain rate feedback, 24-31
Advanced process control fieldbuses, 26-11
Affine connection, 5-10
Affine projection, 22-4
AI, 1-5
AIBO, 1-11
AIC, 1-5
Aliasing, 13-9–10
frequency-domain view of, 13-10f
Alignment errors, 13-4–5
Al Qaeda, 1-10
Ambient temperature, 10-2
American Machine and Foundry, 1-7
AMF Corporation, 1-7
Analog displacement sensors, 12-4–5
Analog photoelectric, 12-7
Analog sensors, 12-4–10, 13-18–19
analog filtering, 13-19f
Analog-to-digital conversion, 13-11
Analyzing coupled systems, 19-8–9
Angular error motions, 10-6t, 10-9f
Angular velocity
and Jacobians associated with parametrized rotations,
2-8–10
ANSI Y14.5M, 10-3
Anticipatory control, 23-12–13
Approximations, 24-25
ARB IRB1400, 17-2f
Aristotle, 23-10
ARMA, 14-13
Arm controller
robot end effector integrated into, 11-4f
Arm degrees of freedom augmentation, 24-39–41
bracing strategies, 24-39
inertial damping, 24-40
piezoelectric actuation for damping, 24-41
Articulating fingers, 11-11
Artificial intelligence (AI), 1-5
Artificial Intelligence Center (AIC), 1-5
ASEA, Brown and Boveri (ABB), 1-8
ASEA Group, 1-8
Asimov, Isaac, 1-3–4, 1-4, 1-6
Asimov, Janet Jeppson, 1-4
Asimov, Stanley, 1-4
Assembly task
two parts by two arms, 20-10
Augmented dynamics-based control algorithm, 20-7, 20-7f
I-1

I-2 Robotics and Automation Handbook
Augmented reality, 23-3
AUTOLEEV
Kane’s method, 6-27
Automated system
forming leads on electronic packages, 10-13f
leads location, 10-14f
Automatic calculator invention, 1-2
Automatic rifle, 1-2
Automatic symmetry cell
detection, matching and reconstruction, 22-18–21
Automaton, 1-3
Autoregressive moving-average (ARMA), 14-13
Axis, 5-3
Axis-aligned bounding boxes (AABB), 23-18
6-axis robot manipulator with five revolute joints, 8-13
B
Babbage, Charles, 1-2
Backward recursion, 4-2
Ball races, 12-13
Bar elements
distributed, 24-15
Bares, John, 1-7
Bargar, William, 1-10
Bars and compression, 24-5
Base frame, 2-3, 17-3
Base parameter set (BPS), 14-5
batch LS estimation, 14-7–8
element estimation, 14-7–8
estimation, 14-19–21
online gradient estimator, 14-8
Batch LS estimation
of BPS, 14-7–8
BBN criteria, 13-15
Beam elements in bending
distributed, 24-15–16
Beams and bending, 24-6–7
Bending deformation
geometry of, 24-6f
Bending transfer matrix, 24-16f
Bernoulli-Euler beam model, 6-21
Bernoulli-Euler beam theory, 6-16
Bezout identity, 17-14
Bilateral or force-reflecting teleoperator, 23-2
Body, 5-3–4
Body-fixed coordinate frame, 5-1
Body manipulator Jacobian matrix, 5-5
Bolt Beranek & Newman (BBN) criteria, 13-15
Bond graph modeling, 4-2
BPS. See Base parameter set (BPS)
Bracing strategies
arm degrees of freedom augmentation, 24-39
Bridge crane example, 9-4–6
Broad phase, 23-18–19
Brooks, Rodney, 1-10
BrownBoveriLTD,1-8
Buckling, 24-7–9
Building
reconstruction, 22-21f
C
Cable-driven Hexaglide, 9-1
Cable management, 13-7
CAD and graphical visualization tools, 21-1
Cadmus, 1-1
Calibration cube
four images used to reconstruct, 22-12f
two images, 22-7f
two views, 22-7f
Camera calibration, 22-4
Camera model, 22-2–3
Camera poses
cell structure recovered, 22-21f
CAN, 26-10
Capacitive displacement sensors, 12-5–6
distance and area variation in, 12-6f
Capek, Jose, 1-3
Capek, Karel, 1-3
Carl Sagan Memorial Station, 1-9
Carnegie Mellon University, 1-7
Cartesian error, 15-22f
Cartesian manipulator
stiffness control of, 16-5–6
Cell structure recovered
camera poses, 22-21f
Centrifugal forces, 4-8
Centrifugal stiffening, 6-14
Characterizing human user
haptic interface to virtual environments, 23-5
Chasles’ Theorem, 2-5, 2-6, 5-3
Chatter free sliding control, 18-4–6
Chemical process control, 26-18f
Christoffel symbols, 5-8, 5-10
of first kind, 17-5
CimStation Robotics, 21-2
CimStation simulated floor, 21-2f
Cincinnati Milacron Corporation, 1-8
Closed-form equations, 4-7–8
Closed-form solutions
vs. recursive IK solutions, 14-18f
Closed kinematic chains, 24-10
Collision detection, 23-17, 23-18–19
Collision detector, 23-17
flowchart, 23-18f
Collision sensors, 11-17
Column buckling, 24-8
Combinations of loading, 24-7–9
Combined distributed effects and components, 24-16
Command generation, 9-4
Command shaping filter, 24-34
Common velocity
bond graph, 19-8f, 19-9f
feedback representation, 19-8f, 19-9f
Compensation based on system models, 23-15
Compliance based control algorithm, 20-6, 20-6f
Compliant support of object, 20-8f
Composition of motions, 2-5
Compressed air, 11-8
Compression
and bars, 24-5

Index I-3
Computational complexity reduction, 24-27
Computed torque, 17-8
Computed-torque control design, 15-5–6
Computejacobian.c, 3-18, 3-23–24
Conductive brushes, 12-15
Configuration, 5-2
infinite numbers
with none, 3-3f
with one, 3-3f
Configuration space, 17-3
Consolidated Controls Corporation, 1-5
Constrained Euler-Lagrange equation
geometric interpretation, 5-12
Constrained layer dampers, 13-15
Constrained systems, 5-11–13
Constraint(s), 13-6
Kane’s method, 6-14
Constraint connection, 5-12
Constraint distribution, 5-12
Constraint forces and torques
between interacting bodies, 7-15–16, 7-15f
Contents description, 24-2
Continuously elastic translating link, 6-17f
Continuous motion, 22-8
Continuous system
Kane’s method, 6-16
Control, 24-27
Control algorithms, 13-19–21
Control architecture, 17-7
Control bandwidth, 15-2
Control design, 16-5–6, 16-6–8, 16-12–14
with feedback linearization, 15-6–10
method taxonomy, 17-6–8
µ-synthesis feedback, 15-16–19
Control effort
tracking of various frequencies
with feedforward compensation, 9-20f
without feedforward compensation, 9-17
Controller(s)
experimental evaluation, 15-19–21
implementation, 13-16–17
networks, 26-11–12
selection of, 26-13
Controller area network (CAN), 26-10
ControlNet, 26-11, 26-12
Control system design, 17-8
Conventional controllers
bode plots of, 15-14f
Coordinated motion control
algorithm, 20-7–9
based on impedance control law, 20-7–10
of multiple manipulators
for handling an object, 20-5–7
problems of multiple manipulators, 20-5–7
Coordinate frames, 8-3, 8-13
schematic, 8-3
Coordinate measuring machine
deflection of, 9-3f
Coordinate systems, 20-3f
associated with link n, 4-3f
Coriolis centrifugal forces, 5-8
Coriolis effect, 4-7
Coriolis force, 4-8
Coriolis matrix, 5-8
Corless-Leitmann approach, 17-14
Correlation among multiple criteria, 10-13–14
Cosine error
example of, 13-4f
CosmosMotion, 21-10
cost, 21-10
Coupled stability, 19-10–13
Coupled system stability analysis, 19-10
Couples systems poles
locus of, 19-13f
Covariant derivative, 5-10
CPS
of tracking errors, 15-20
Craig notation and nomenclature, 3-3
Crane response to pressing move button, 9-5f
Crane response to pressing move button twice, 9-5f
Critical curve, 10-16
calculating points on, 10-18f
Critical surface, 22-8
Cross-over frequencies, 15-18t
Ctesibus of Alexandria, 1-2
Cube
reconstruction from single view, 22-17f
Cube drawing
example, 21-12
Cumulative power spectra (CPS)
of tracking errors, 15-20
Cutting tool, 10-16f
envelope surface, 10-16f
as surface of revolution, 10-17f
swept volume, 10-16f
CyberKnife stereotactic radiosurgery system, 25-6–9, 25-7f
accuracy and calibration, 25-9
computer software, 25-8–9
patient positioning, 25-8
patient safety, 25-9
radiation source, 25-7
robotic advantage, 25-9
robot manipulator, 25-7
stereo x-ray imaging system, 25-8
treatment planning system for, 25-8, 25-8f
D
DADS, 21-10
Damping, 24-4–5
inertial
arm degrees of freedom augmentation, 24-40
three axis arm as micromanipulator for, 24-41f
inertial controller
quenching flexible base oscillations, 24-41f
passive, 24-39, 24-40f
sectioned constraining layer, 24-39f
piezoelectric actuation for
arm degrees of freedom augmentation, 24-41
Dante, 1-7
Dante II, 1-7
DARPA, 1-6

I-4 Robotics and Automation Handbook
Dartmouth Summer Research Project on Artificial
Intelligence, 1-6
Da Vinci Surgical System, 1-11, 25-9–10, 25-10f
DC brushless motor, 12-16
DC brush motor, 12-15–16, 12-15f
Decentralized conventional feedback control, 15-3–5
Decentralized motion control
with PD feedback and acceleration feedforward, 15-4f
Decentralized PD, 15-2
controllers
control torques produced with, 14-23f
Defense Advanced Research Projects Agency (DARPA), 1-6
Deformable bodies mechanics, 24-2–3
DEMLIA’s IGRIP, 21-7
Denavit-Hartenberg (D-H), 8-1
approach, 3-4
convention, 8-1–21
examples, 8-8–21
frame assignment, 3-8
framework, 2-7
notation, 21-7
parameters, 3-11–13, 8-1–5
C-code, 3-18, 3-29–30
determining for Stanford arm, 8-13
example PUMA 560, 3-11t
flow chart, 8-5f–6f
schematic, 8-4f
systematic derivation, 8-4
pathology, 2-7
procedure, 3-4
representation, 21-14
transformation, 4-1
Density, 24-4
Desired object impedance, 20-8f
Detent torque, 12-14
Determinism, 13-4
Device-level networks, 26-10–11
DeviceNet, 26-10
Devol, George C., 1-4–5
Dexterity, 20-2f
D-H. See Denavit-Hartenberg (D-H)
Dh.dat, 3-18, 3-28
Different image surfaces, 22-4
Digital sensors, 12-10–12
common uses for, 12-11–12
with NPN open collector output, 12-11f
Digital-to-analog conversion, 13-13–14
Direct collision detection, 23-19
Direct-drive robotic manipulator modeling and
identification, 14-14–15
experimental setup, 14-14–15
Direct impedance modulation, 19-17–18
Discrete-time samples
multiple continuous time-frequencies, 13-10f
Discrete-time system
sampling and aliasing, 13-9–10
Discrete-time system fundamentals, 13-9–14
Discretization of spatial domain, 24-19–25
Disk and link interaction, 7-19–21, 7-20f
Dispensers, 11-16
Displacement vector, 8-3
Distributed bar elements, 24-15
Distributed beam elements in bending, 24-15–16
Distributed control system (DCS), 26-5
Distributed models, 24-15
Distributed shaft elements, 24-15
Disturbances
feedforward compensation of, 9-15f
DOF model, 21-17f
single
Matlab code, 21-23–24
DOF planar robot
grasping object, 6-15f
with one revolute joint an one prismatic joint, 6-8–13
with two revolute joints, 6-4–8
3-DOF system
full sea state
Matlab code, 21-24–27
Double integrator system, 17-8
Double pendulum in the plane, 7-16–18
associated interaction forces, 7-16f
Double pole single throw (DPST) switch, 12-10, 12-10f
Doubles two matrices
C-code, 3-28–29
DPST switch, 12-10, 12-10f
Drive related errors, 10-6t
Drone, 1-10
Duality principle, 16-10–12
Ductile materials static failure, 24-3
Dynamical scenes, 22-13
Dynamic data exchange (DDE), 26-6
Dynamic effects, 10-6t
Dynamic equation, 5-1, 5-6–11
of motion, 21-17
Dynamic models, 16-2–4
in closed form
and kinematics, 14-15–17
Dynamic Motion Simulation (DADS), 21-10
DYNAMICS, 6-3
Dynamics, 17-5, 24-11–15
error
block diagram, 17-9f
Dynamics solver
flowchart, 23-18f
E
Eddy current sensors, 12-5
Edinburgh Modular Arm System (EMAS), 1-11
Eigenfunctions, 24-18–19
Eigenvalues and corresponding eigenfunctions, 24-18–19
Eight-point linear algorithm, 22-4, 22-5
coplanar features, 22-7–8
homography, 22-7–8
Eight-point structure from motion algorithm, 22-6
Elastic averaging, 13-6
Elastic modulus, 24-3–4
Elbow manipulator, 3-5, 3-5f
link frame attachments, 3-5f
Electrical power, 11-9
Electromagnetic actuators, 12-12–17
Electromagnets, 11-16

Index I-5
Electronic leads
foot side overhang
specification, 10-4f
Electronic numerical integrator and computer (ENIAC),
1-5
EMAS, 1-11
Embedding of constraints
dynamic equations, 5-12
Encoders, 12-1, 13-11–12
typical design, 12-2f
Endeffector(s), 5-4
attachment precision, 11-4–5
design of, 11-1–19
grasping modes, forces, and stability, 11-11–13
gripper kinematics, 11-9–11
grippers and jaw design guidelines, 11-13–16
interchangeable, 11-16
multi-tool, 11-17f
power sources, 11-7–9
robot attachment and payload capacity, 11-3–7
sensors and control considerations, 11-17–19
special environments, 11-3
special locations, 11-5
Endeffector frame, 17-3
transformation to base frame, 8-8f
Endoscopic surgery, 1-10
Engelberger, Joseph F., 1-4–5, 1-10
Engelberger Robotics Awards, 1-5
ENIAC, 1-5
Environmental forces, 19-2f
Environmental impedances
types of, 16-10f
Environmental issues, 1-3
Environmental stiffness
locus of coupled system poles, 19-14f
Epipolar constraint, 22-4–5
Equations of motion
of rigid body, 7-13–14
Equivalent control, 18-4–6
Ergonomic simulation, 21-8f
Ernst, Heinrich A., 1-6
Error bounds
linear vs. quadratic, 17-13f
Error budgeting, 10-1–20
accuracy and process capability assessment,
10-12–15
error sources, 10-5–7, 10-6t
probability, 10-2–3
tolerances, 10-3–5
Error dynamics
block diagram, 17-9f
Error equation, 17-9
Error sources, 10-1
effects on roundness, 10-15f
superposition of, 10-15f
Essential matrix, 22-4–5, 22-6
Ethernet, 26-11, 26-12, 26-12f
Euclidean distance, 2-1
Euler angles, 2-4, 17-4
Euler-Lagrange equations, 5-6
Euler’s equation of motion, 4-3f
Euler’s equations
covariant derivative, 7-8–11
disadvantages of, 7-8
in group coordinates, 7-12
rigid body, 7-11–13
Exact-constraint, 13-6
Exciting trajectory
motions of, 14-20f
Exciting trajectory design, 14-8–9
Exploratory procedures, 23-10
Exponential coordinates, 5-3
Exponential map, 5-2
action on group, 7-9f
Extended forward kinematics map, 5-4
F
Factorization algorithm
multilinear constraints, 22-13
Factory floor, 21-3f
Fault tree analysis (FTA), 25-4
FBD, 26-15
Feasibility, 10-1
Feature extraction, 22-3
Feature matching, 22-3
Feature tracking, 22-3
Feedback compensation, 13-20
Feedback control design
µ-synthesis, 15-16–19
Feedback control hardware, 13-16
Feedback controller C1
bode plots of, 15-18f
Feedback linearization control, 17-7–8
Feedback sensors, 13-17–19
Feedforward compensation, 13-21
5% model errors effect on, 9-18f
10% model errors effect on, 9-19f
Feedforward control
action, 9-15–16
conversion to command shaping, 9-23–24
Feedforward controllers, 9-4
Fictitious constraints, 6-16
Fieldbuses
advanced process control, 26-11
capabilities, 26-13f
Filippov solutions, 17-15
Finite element representations, 24-25
First joint
flexible dynamics, 15-11f
sensitivity functions for, 15-16f
First U.S. robot patent, 1-5
Fixturing errors, 10-6t
FK, 14-2
map, 5-4, 17-3–4
Flexible arm
kinematics of, 24-20
Flexible exhaust hose, 21-3
Flexible robot arms, 24-1–42
design and operational strategies, 24-39–41
open and loop feedforward control
command filtering, 24-32–35

I-6 Robotics and Automation Handbook
Flexible robots trajectory planning, 9-1–25
applications, 9-13–14
Flight simulation, 23-2
Fluid power actuators, 12-17–18
Folded back, 3-2
Food processing, 11-3
Force(s)
endeffector, 11-11–13
and torques
acting on link n, 4-3f
between interacting bodies, 7-15–16
and velocity, 5-3–4
Force and metrology loops, 13-5–6
Force and torque, 12-9
Force computation, 5-8–9
Force control block diagram, 16-11f
Force controlled hydraulic manipulator, 21-18f
Force controller
with feed-forward compensation, 18-3f
Force feedback, 19-18–19
Force sensing, 11-18, 23-3
Force sensing resistors (FSR), 11-18
Force sensors, 11-17
Force step-input, 16-11–12
Forward dynamics form, 23-6
Forward dynamics solver, 23-20
Forward kinematics (FK), 14-2
map, 5-4, 17-3–4
Forward-path
block diagram of, 19-8f
Forward recursion, 4-2
Foundation Fieldbus, 26-11
Foundation Trilogy, 1-3
Four bar linkage jaws, 11-10
Four bar linkages gripper arms, 11-4f
4x4 homogeneous transformation, 4-1
Fowardkinematics.c, 3-18, 3-24–25
Frames of reference
assigning, 2-7
Frankenstein, 1-2
Frankenstein, Victor, 1-2
Free-body approach, 4-3
Freedom robot army manipulator, 8-9f
Frequency domain solutions, 24-16–19
Frequency response and impulse response, 24-19
FRFs
magnitude plots of, 15-13f
Friction
in dynamics, 7-21–22
and grasping forces, 11-12–13
Frictional forces, 19-2f
Friction forces, 7-16–17
as result of contact, 7-22f
Friction modeling, 14-5–6
Friction modeling and estimation, 14-19
Friction model validation
torque applied to third joint, 14-20f
Friction parameters estimation, 14-6–7
Friction system
with feedforward compensation
block diagram of, 9-20f
control effort for, 9-22f
response of, 9-22f
without feedforward compensation
control effort in, 9-21f
mass response in, 9-21f
FSR, 11-18
FTA, 25-4
Function block diagram (FBD), 26-15
Furby, 1-11
G
GAAT, 21-3
Gauss-Jordan elimination, 3-26–28
Generalized active force, 6-4
Generalized conditions, 17-5
Generalized inertia force, 6-4
Generalized inertia matrix, 5-6
General Motors (GM), 1-2, 1-5, 1-7
Generating zero vibration commands, 9-5–9
Generic system
block diagram, 9-4f
Generic trajectory command
input shaping, 9-9f
Geodesic equation, 5-10
Geometric interpretation, 5-10–11
Geometric model, 23-17
Geometric vision
survey, 22-1–22
Global proximity test, 23-18
Global warming, 1-3
GM, 1-2, 1-5, 1-7
Golem, 1-1, 1-2
Grafton, Craig, 21-2
Graphical animation, 21-12–13
Graphical user interface (GUI), 26-6
Graphical visualization tools, 21-1
Grasping forces
and friction, 11-12–13
Grasping modes
endeffector, 11-11–13
Grasping stability, 11-11–12
Grasp types
for human hands, 11-12f
Greek mythology, 1-1
Gripper and jaw design geometry, 11-13
Gripper arms
four bar linkages, 11-4f
Gripper design
case study, 11-14–15
products, 11-13–14
Gripper forces and moments, 11-12f
Gripper jaw design algorithms, 11-15–16
Gripper kinematics
endeffector, 11-9–11
Grounded, 23-3
Guaranteed stability of uncertain systems, 17-14
GUI, 26-6
Gunite and associated tank hardware, 21-4f
Gunite and Associated Tanks (GAAT), 21-3
Index I-7
H
Hair transplantation robot, 25-12
Hall effect sensor, 12-8, 12-8f
Haptic interface to virtual environments, 23-1–21, 23-2f
applications, 23-3–4
characterizing human user, 23-5
classification, 23-2–3
design, 23-7–9
related technologies, 23-1–2
specification and design of, 23-5–7
system network diagram and block diagram, 23-5f
system performance metrics and specifications, 23-4–9
Haptic perception in the blind, 23-11
Haptic rendering
block diagram, 23-8f
schematic representation, 23-7f
Haptics
history, 23-10–11
Haptic terms
taxonomy of, 23-3f
HART
sensor-level communications protocol, 26-9–10
HAT controller model
details, 21-19f
HAT manipulator model
details, 21-19f
HAT operator, 22-3
HAT simulation model, 21-18f
Hazard analysis, 25-4–5
initial and final risk legend, 25-5
likelihood determination, 25-5
risk acceptability, 25-5
severity determination, 25-5
verification and validation, 25-4
Hazardous environments, 11-3
Headers
C-code, 3-29
Hebrew mythology, 1-1
HelpMate Robotics, 1-10
Hexaglide mechanism, 9-2f
High end robot simulation packages, 21-7–8
Highway addressable remote transducer (HART)
sensor-level communications protocol, 26-9–10, 26-10f
HMA, 21-3
HMI, 26-6–8
Hohn, Richard, 1-8
Holding torque, 12-14
Holonomic constraints, 5-11, 16-14–16
Homogeneous matrix, 5-2
Homogeneous transformation, 2-6, 2-7
computes
C-code, 3-24–25, 3-25–26
Homogeneous transformation, 4x4, 4-1
Homogeneoustransformation.c, 3-18, 3-25–26
Homogeneous transformation matrices (HTM), 10-8,
10-9, 10-10
algorithm for determining, 8-6–8
Homogeneous vector, 5-2
Homunculus, 1-2
Honda, 1-11
Hooke’slaw,24-2
Hose management arm (HMA), 21-3
HTM. See Homogeneous transformation matrices (HTM)
Human and automatic controller, 23-4
Human force without compensation, 21-20f
Human haptics, 23-9–13
Human-machine interface (HMI), 26-6–8
gas delivery subsystem menu example, 26-7f
Human user
haptic interface to virtual environments, 23-5
Hybrid control, 17-20
Hybrid controller, 26-5
Hybrid impedance control, 16-9–14
type, 16-9–10
Hybrid impedance controller, 16-13f
Hybrid position/force control, 16-6–9, 16-8f
Hybrid system, 17-20
Hybrid type of control algorithms, 20-6
Hydraulic actuators, 12-17. See also HAT controller model
Hydraulic fluid power, 11-8
I
I, Robot, 1-3
Idealized structures and loading, 24-5
IEA, 26-12
IGRIP, 21-7, 21-8
IK. See Inverse kinematics (IK)
Image formation, 22-2–3
Impact equation, 5-13–14
Impedance
vs. admittance regulation, 19-9–10
and interaction control, 19-1–23
Impedance design
for handling an object, 20-7–9
Impulses, 9-6
canceling vibration, 9-6f
Incremental position sensors, 13-11–12
Independent proportional plus derivative joint control,
24-27–29
Inductive (eddy current) sensors, 12-5
Industrial Ethernet Association (IEA), 26-12
Industrial Open Ethernet Association (IOANA), 26-12
Industrial protocol (IP), 26-12
Industrial robot
birth of, 1-4–5
invention, 1-2
Inertia activity, 6-4
Inertial damping controller
arm degrees of freedom augmentation, 24-40
quenching flexible base oscillations, 24-41f
three axis arm as micromanipulator for, 24-41f
Inertial force, 6-4, 19-2f
Inertial reference frame, 4-2
Inertia matrix, 17-5
Inertia tensor, 4-9, 5-6
Infinitesimal motions
and associated Jacobian matrices, 2-8–12
rigid-body, 2-11–12
screw like, 2-11
Infinitesimal twist, 2-11

I-8 Robotics and Automation Handbook
Information networks, 26-12
Inner loop control, 17-8
Inner loop/outer loop, 17-8
architecture, 17-8f
Input/output, 26-8–9, 26-8f
Input shapers, 13-21
sensitivity curves of, 9-10f
Instruction list (IL), 26-16
Integrated end effector attachment, 11-4
Integrated Surgical Systems, Inc., 1-10
Interacting rigid bodies systems dynamics, 7-1–23
Interaction
control implementation, 19-14–15
as disturbance rejection, 19-5
effect on performance and stability, 19-2–3
as modeling uncertainty, 19-5
port admittance, 19-12f
port connection causal analysis, 19-8–9
Interaction calculator, 23-17, 23-19–20
interconnection flowchart, 23-18f
Interchangeable endeffectors, 11-16
International Space Station (ISS), 1-9
Inuit legend, 1-1
Invasive robotic surgery, 25-11
Inverse dynamics, 17-8
computational issues, 4-8
Inverse dynamics form of equations, 24-26
Inverse kinematics (IK), 3-1–30, 14-2
analytical solution techniques, 3-4
dialytical elimination, 3-13
difficulty, 3-1–3
existence and uniqueness of solutions, 3-2–3
map, 17-3–4
numerically solves
n degree of freedom robotic manipulator, 3-19–22
reduction to subproblems, 3-4
solutions, 3-2f
infinite numbers, 3-3f
solution using Newton’s method, 3-14–16
utilizing numerical techniques, 3-13–16
zero reference position method, 3-13
Inversekinematics.c, 3-18–30
Inversekinematics.h, 3-18, 3-30
Inverse matrix
computes
C-code, 3-26–28
IOANA, 26-12
IP, 26-12
Isocenter, 25-9
Isolated link
force and torque balance, 4-3–4
Isolate invariants, 23-12
ISS, 1-9
Ith arm coordinate system, 20-3f
It’sBeenaGoodLife, 1-4
J
Jacobian(s)
associated with parametrized rotations
angular velocity, 2-8–10
constructs approximate
C-code, 3-23–24
manipulator, 17-4
six by six, 3-14, 3-23–24
for ZXZ Euler angles, 2-10–11
Jacobian matrices
adjoint, 2-12
associated
and infinitesimal motions, 2-8–12
body manipulator, 5-5
Jacobian singularities, 3-13
Jacquard, Joseph, 1-2
Japanese Industrial Robot Association (JIRA), 1-7–8
Japanese manufacturers, 1-7
Jaws
design geometry, 11-13
four bar linkage, 11-10
with grasped object, 11-15f
JIRA, 1-7–8
Johnson, Harry, 1-7
Joint errors
ranges of, 15-20f
variances of, 15-21t
Joint motions
online reconstruction of, 14-9–10
7-joint robot manipulator, 8-15–18
Joint space, 17-3
inverse dynamics, 17-8–9
model, 16-2–3
trajectory
for writing task, 14-18f
Joint torques, 4-8
Joint variables, 5-4
K
Kalman filter
bode plots of, 14-10f
Kalman filtering technique, 14-7
Kane, Thomas, 6-1
Kane’s dynamical equations, 6-3
Kane’s equations, 6-4
in robotic literature, 6-22–25
Kane’s method, 4-2, 6-1–29
commercial software packages related, 6-25–29
description, 6-3–4
discrete general steps, 6-5
kinematics, 6-18–22
preliminaries, 6-16–18
Kinematic(s), 17-3–4, 24-9–11
chain, 17-2
closed, 24-10
deformation, 24-10
design, 13-6
and dynamic models in closed form, 14-15–17
interfaces, 23-3
Kane’s method, 6-18–22
modeling, 10-7–12, 14-3–4
simulation, 21-1
Kronecker product of two vectors, 22-5
Kron’s method of subspaces, 7-14