Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.


Flexible Robot Arms 24
-25
The generalized force corresponding to joint variable q
i
is the joint torque F
i
in those cases where the
boundary conditions are clamped, as will be assumed here.
d
dt
(∂ K/∂
˙
q
j
) −∂ K/∂q
j
+
∂V
e
∂q
j
+
∂V
g
∂q
j
= F
j
(24.89)
d
dt
(∂ K/∂
˙
δ
jf
) −∂ K/∂δ
jf
+
∂V
e
∂δ
jf
+
∂V
g
∂δ
jf
= 0 (24.90)
24.2.6.1 Finite Element Representations
Additional detail can be added to a model by using more exact geometry for the structural elements;
however, a detailed finite element model will contain at least an order of magnitude more variables than
a well-derived assumed modes model. Fortunately, it is possible to combine the best of both techniques.
Examination of the above shows that the result of the specification of the geometry (mass and stiffness
distribution) and all the analysis that ensues are embodied in a modal mass matrix, a modal stiffness matrix,
and similar parameter terms that account for the Coriolis and centrifugal terms. These matrices can also be
constructed from basis shapes resulting from a finite element representation of the components followed
by a specification of approximate boundary conditions on each element separately and determination of
the resulting mode shape. This process is fairly direct for the finite element expert but beyond the scope
of this volume.
24.2.6.2 Approximations of This Method
The reader should be aware that the above technique, while satisfactory for most robotic applications, is
an approximation that will be inaccurate in some instances. Some of these instances have already been
alluded to, such as the case of large elastic deformation. More subtle inaccuracies exist that bear names
associated with the conditions of their occurrence. If the base of the arm is rotating rapidly about the Z
axis, vibrations in the X − Y plane would not account for the position dependent body forces effectively
stiffening the beam and leading to the phenomena of centrifugal stiffening. Hence, these equations are not
recommended for modeling helicopter rotors or similar rapidly rotating structures.
24.2.7 Simulation Form of the Equations
Twoformsof the equations of motion arecommonlyfound useful. Forpurposes of simulation the following
structure may be used:
M
rr
(q) M
rf
(q)
M
fr
(q) M
ff
¨
q
r
¨
q
f
=−
00
0 K
s
q
r
q
f
+ N(q,
˙
q) + G(q) = R(q,
˙
q, Q)
(24.91)
where
q
r
=rigid coordinates or joint variables
q
f
=flexible coordinates
M
ij
=the “mass” matrix for rigid and flexible coordinates corresponding to the rigid (i, j = r )or
flexible (i, j = f ) coordinates and equations
N(q,
˙
q) =nonlinear Coriolis and centrifugal terms
G(q) =gravity effects
Q =externally applied forces
R =effect of external and restoring forces and all other nonconservative forces including friction
For serial arms it is generally more difficult to produce this form of the equations, because all second
time derivatives must be collected. For simulation the second derivatives must be solved for, given the input
forces Q, the coordinates, and their first derivatives. An integration scheme, often one capable of handling
stiff systems of equations, is then used to integrate these equations, forward in time twice, given initial
Copyright © 2005 by CRC Press LLC
24
-26 Robotics and Automation Handbook
conditions and external forcing Q(t). The solution for
¨
q requires either the inversion of its coefficient
matrix or, more, efficiently another means such as singular decomposition to solve these equations for
known constant values (R is constant) of all other terms. This solution must be repeated at each time step,
leading to the major computational cost of the process.
24.2.8 Inverse Dynamics Form of the Equations
The inverse dynamics solution seeks the inputs Q that would yield a known time history of the coordinates
q,
˙
q, and
¨
q. The inverse dynamics equations are less readily applied for flexible arms than for rigid arms,
not due to the solution of the equation as given below, but because the values of q
f
are not readily obtained,
especially for some models. That situation is improved slightly if the rigid coordinates are chosen, not as
joint angles, but as the angles connecting the preceding and following axes. In such a way the tip of the arm
can be prescribed only in terms of q
r
. We know all velocities should come to zero after the arm reaches its
final position. If gravity is to be considered, the static deflections at the initial and final times will also be
needed. These can be solved for without knowing the dynamics. In the common case that Q = R
Q =
M
rr
(q) M
rf
(q)
M
fr
(q) M
ff
¨
q
r
¨
q
f
+
00
0 K
s
q
r
q
f
− N(q,
˙
q) − G(q) (24.92)
In general Q is dependent on the vector T of motor torques or forces at the joints, and the distribution of
these effects is such that
Q =
B
r
B
f
T (24.93)
where T is the same dimension as q
r
. By rearranging the inverse dynamics equation we obtain
B
r
−M
rf
B
f
−M
ff
T
¨
q
f
=
M
rr
M
rf
¨
q
r
+ N(q,
˙
q) + G(q)
(24.94)
which is arranged with a vector of unknowns on the left side of the equation. Unknowns may also appear in
the vector of nonlinear and gravitational terms which contain q
f
and
˙
q
f
, and strictly speaking, the solution
must proceed simultaneously. In practice these are typically weak functions of the flexible variables and
the solution can proceed as a differential-algebraic equation.
It is worth noting what happens if we choose other rigid coordinates, such that the tip position is not
described by q
r
alone. Now B
f
is zero, B
r
= I , and the tip position is unknown. We may be satisfied
with specifying the joint coordinates, however, during the motion of the robot and accept the resulting
deflection of the tip. Further note that the equations are likely to be nonminimum phase. Resorting to
linear thinking for simplicity, the transfer functions have zeros in the right half plane. The inverse dynamics
effectively inverts the transfer function giving poles in the right half plane. Normal solution techniques
produce an unstable solution which is causal. Another solution, the acausal, stable solution exists and will
be found to be useful when we discuss control via inverse dynamics.
24.2.9 System Characteristic Behavior
Nonminimum phase behavior will be observed at the tip of a uniform beam subject to a torque input at its
root. In a flexible arm this manifests itself as an initial reverse action to a step torque input. In other words,
the initial movement of the tip is in the opposite direction of its final displacement. The consequences
of this behavior are pervasive if the tip position is measured and used for feedback control. To see this
effect, a linear analysis is sufficient, and the transfer matrix frequency domain analysis is well suited for this
purpose. The nonminimum phase in this case is described by zeros in the right half plane for the transfer
function from torque to position. When a feedback loop is closed, the root locus analysis shows that the
Copyright © 2005 by CRC Press LLC

Flexible Robot Arms 24
-27
positive zero must attract one branch of the root locus into the right, unstable region of the complex plane.
The usual light damping of the flexible vibration modes allows this to happen with low values of feedback
gain. A uniform beam shows these characteristics, and it has been shown (Girvin [14]) that tapering a
beam reduces the severity of the nonminimum phase problem but does not eliminate it.
24.2.10 Reduction of Computational Complexity
The equations presented above can result in very complex relationships that need to be solved in order to
be used either for simulation or for inverse dynamics. It is worth enumerating several ways of reducing
this complexity. The number of basis shapes can be reduced if assumed modes close to the true modes
are used for basis shapes. Several terms in the equation involve integration of the product of two basis
shapes. If orthogonal assumed modes are used the cross product of two different mode shapes is zero when
integrated over the length of the beam.
24.3 Control
The flexibility of a motion system becomes an issue when the controlled natural frequency becomes
comparable to the vibrational frequencies of the arm in the direction of movement. One of the first things
to know is when this might occur. If it is expected to be an issue, the next thing to consider is ways to
ameliorate the problem. This involves a great number of possibilities, many of which involve control, but
not exclusively control. Control should not be interpreted to exclusively mean feedback control, because
open loop approaches are also very valuable.
24.3.1 Independent Proportional Plus Derivative Joint Control
The vast majority of feedback controlled motion devices, including mechanical arms, use some of pro-
portional plus integral plus derivative (PID) control. Velocity feedback may be an alternative to derivative
feedback. The simplest approach here is to apply the PID algorithm to each joint independently. In this
case the actuation of other joints can create a disturbance on each joint which could have been anticipated
with a centralized approach. This problem was analyzed in the earliest work considering the flexibility of
robot arms [11]. Because the parameters involved in a PD controller (no integral action because it has
minimal effect) are only two per joint, the problem can be effectively studied by simply sweeping through
the design space. The pole positions of the controlled flexible system provide a way to judge the controller
effectiveness. PD control of a rigid degree-of-freedom enables arbitrary placement of the system poles.
The dominant poles of the flexible arm behave as a rigid system when the lowest natural frequency of
the system is about one-fifth the flexible natural frequency with the joints clamped. Critical damping on
the dominant modes cannot be obtained by adding additional derivative gain when the servo frequency
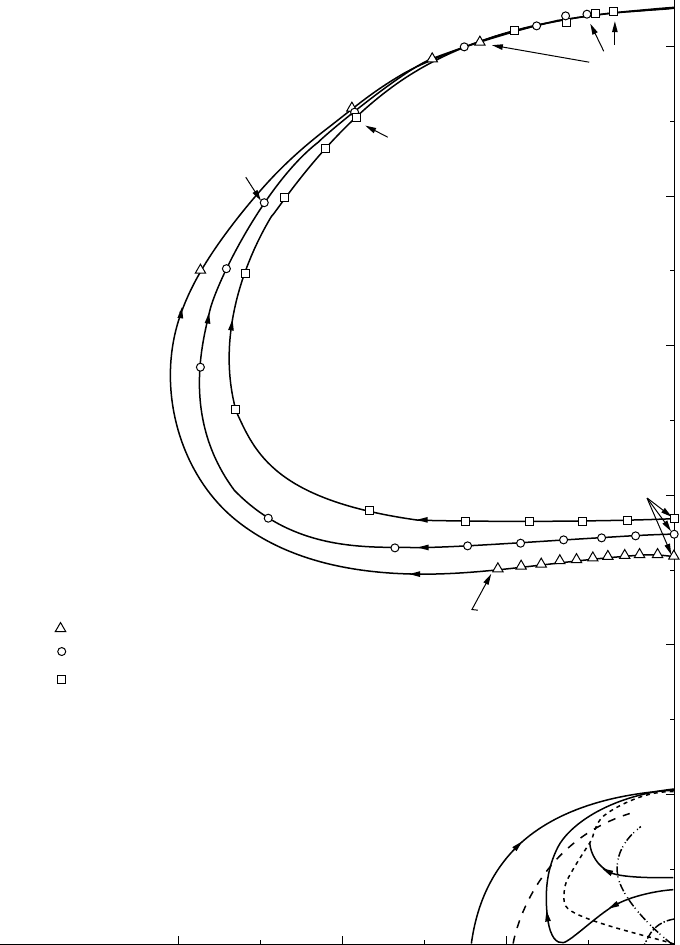
is above about one third of the structural natural frequency. Damping reaches a maximum and then de-
creases with additional velocity or derivative feedback. The effect of derivative feedback for three values
of proportional feedback is sketched in Figure 24.4. While more joints and links distort this conclusion to
some extent, servo bandwidths above one third the system’s natural frequency are very hard to achieve.
To the extent that true PD action can be obtained, the independent joint controlled arm will not go
unstable but will become highly oscillatory with high gains. The root locus converges to the position of
the clamped joint natural frequencies which make up the zeros of this system since this is the condition
of zero joint motion. Higher modes that start at the pinned-free natural frequencies are seen to converge
to the higher clamped-free natural frequencies. Zero joint motion means the joints are unable to move in
response to vibration and thereby unable to remove the vibrational energy. Note that heavily geared joints
or joints actuated by hydraulic actuators may not be back drivable in any event, and hence, the shaping
of the commanded motion becomes the most effective way to damp vibration. Low gains still have the
effect of smoothing out abrupt commands that would excite vibration although at the expense of rapid
and precise response.
Copyright © 2005 by CRC Press LLC
24
-28 Robotics and Automation Handbook
−3.0 −1.0−2.0
1.0
2.0
3.0
4.0
5.0
6.0
ζ = 5.0
ζ = 0.0
ζ = 1.0
ζ = 1.0
ζ = 1.0
1 M (jω/ω
c
)
Higher Order Roots
ω
s
/ω
c
= 0.167
ω
s
/ω
c
= 0.383
ω
s
/ω
c
= 0.500
Values of ζ appearing for each case are:
0.0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7,
0.8, 0.9, 1.0, 2.0, 3.0, 4.0, 5.0.
RE (jω/ω
c
)
0.167
0.383
ζ = 1.0
ζ
= 0.7
ζ
= 0.9
0.5
FIGURE 24.4 Root loci for three proportional gains as derivative gain varies.
When multiple axes are controlled with PD control, the details become more complicated but the overall
behavior remains the same. If two joints contribute to the same vibrational mode, they both offer points
at which energy can be put into or taken out of that mode. The limiting case is that energy can be taken
out in a distributed fashion, giving a bandwidth which is a larger percentage of the natural frequency but
not exceeding it.
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-29
–1 –0.8 –0.6 –0.4 –0.2 0
Real Axis
0.2 0.4 0.6 0.8 1
–2
–1.5
–1
–0.5
0
0.5
1
1.5
2
X
3
X
2
X
1
+
Image Axis
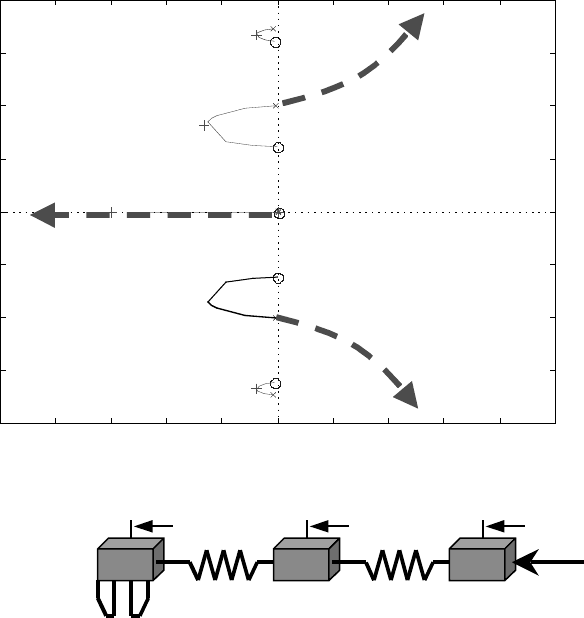
FIGURE 24.5 Noncollocated feedback of dx
1
/dt to apply force at x
3
produces unstable (dashed) root locus. (Collo-
cated feedback shown in solid lines.)
To avert the limitations of flexibility a reasonable but na
¨
ıve approach to improve control performance,
PID control based on measuring the end effector position fails because of the nonminimum phase behavior
(resulting from noncollocated sensors and actuators) of the system. Even simple systems of this type
involving two masses connected by a spring illustrate the effect as shown in Figure 24.5 in a root locus
plot.
24.3.2 Advanced Feedback Control Schemes
Because the number of control algorithms that have been applied to flexible arms is extremely large, it is
not possible to cover all of them in this treatment. Other texts and handbooks exist to present the details
of these algorithms [15]. It is also impossible to verify that all of these approaches have practical merit,
although there may be merit in specific cases to all of them. In this subsection the discussion will begin
with the objectives and obstacles to practical advantages of these designs.
24.3.2.1 Obstacles and Objectives for Advanced Schemes
The modeling of the flexible arm involves many assumptions and presumptions. We assume that joint
friction is linear or at least known. We presume to know the mass, stiffness properties, and geometries of
the links and payloads. We have assumed a serial structure or at least one that could be approximated as
such. Some of the controls proposed use measurements of the system states or related variables. Sensors
Copyright © 2005 by CRC Press LLC
24
-30 Robotics and Automation Handbook
to measure these variables over the workspace may not exist, and actuators that apply desired (collocated)
inputs are unavailable or inappropriate. Some traditional actuators are not back drivable and hence don’t
serve as force or torque sources as the algorithms require. Computation to implement some algorithms is
enormous, and hardware to perform these computations (typically done digitally) does not always exist
at this time although the trend in computational speed is encouraging. Related to the computational
complexity is the model order. Because a perfect model of the structure would contain an infinite number
of modes, practical control design often violates perfection by working with a limited number of modes.
Hence, the unmodeled modes may be excited by our attempts to control the modeled modes (control
spillover), or our attempt to measure the modeled modes may be corrupted by the unmodeled modes
(measurement spillover) that do affect the measurement. One of the objectives of a practical controller is
to overcome these obstacles and thereby move the flexible arm more rapidly, precisely, and reliably through
its prescribed motions.
24.3.2.2 State Feedback with Observers
The flexibility is modeled as a collection of second order equations that interact. In addition, the actuators
will add dynamics that may be important. By converting this model to a state space model the control task
is reduced to moving the arm states to a desired point in state space. That desired point is based on the
desired position and velocity of the end effector, thus specifying the output of the system, plus the fact that
all vibrations should quickly converge to zero. Very powerful techniques exist for doing this if the model
of the system is linear. While the model is never perfectly linear, linearity may be a good approximation in
the region around an operating point of larger or smaller size.
To implement a regulator bringing the state to the origin of the state space the following model and
feedback law can be used. The output is the vector y. The plant matrix A, the input matrix B, the output
matrix C, and the feed through matrix D are all required to be of appropriate dimension.
˙
x = Ax + Bu
u = Kx
(24.95)
y = Cx + Du
Anextensionof these basic equations can producea controllerthat tracksa time varying referencetrajectory
as well. The linear equations can be written so that the origin of the state space produces the desired value
of y. There is no unique choice for states x. This allows one to transform to different representations for
different purposes. In terms of the models derived above the state, variables may be joint variables and
their derivatives and deflection variables and their derivatives.
The first obstacle to this algorithm is measurement of all the needed states. In particular the deflection
variables and their derivatives are not directly available. Strain gages have been used to effectively obtain
this information and state feedback is then approximately achievable [16, 17, 18]. For each basis shape
used to model a beam, one additional measurement will enable calculation of its amplitude. The derivative
of that amplitude can then be approximated with a filtered difference equation.
Stateobserversaredynamic systemsthat use presentand past measurementsof some outputs toconverge
on estimates of the complete system states. Full order observers have the same number of states as the
system they observe, while reduced order observers allow the measured variables to be used directly with a
proportional reduction of the observer order. Observers, that have been optimized according to a quadratic
performance index assuming Gaussian noise is corrupting the measurements and the control input, are
often referred to as Kalman filters after the pioneer in the use of this technique.
Evaluation of the feedback matrix K and the gains of the observer system can be done in various ways.
The optimization scheme referred to above is popular but requires some knowledge or assumption of the
strengths of the noises corrupting inputs and measurements. Pole placement is another approach that
allows the engineer more direct influence over the resulting dynamics. The choice of pole positions that
are “natural” for the system and yet desirable for the application can be challenging. These approaches are
discussed in appropriate references [15].
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-31
Knowledge of the plant model is required to construct the observer and to design the feedback matrix.
Sensitivity to error in this model is one of the major issues when seeking high performance from state
feedback. Nonlinear models complicate this issue immensely.
24.3.2.3 Strain and Strain Rate Feedback
Joint position is commonly differentiated numerically to approximate velocity and similarly link deflection
can be differentiated numerically to complete the vector of state variables to be used in the state feedback
equation. Thus, to control two modes, at least two strain gage readings are needed for effective flexible arm
control which is not extremely sensitive to model parameters [16]. This approach has been implemented
with good results as shown in Yuan [19]. Those experiments incorporated hydraulic actuation ofa6m
long, two-link arm and roughly cut the settling time of PD control in half. Hence, the complexity of an
observer was not required, although filtering of the noisy differentiated signals may be appropriate.
One of the obstacles to the general application of strain feedback, or state feedback in general, is the
lack of a credible trajectory for the flexible state variables. The end user knows where the tip should be,
but the associated strain will not be zero during the move. See the section below on inverse dynamics for
a solution to this dilemma.
24.3.2.4 Passive Controller Design with Tip Position Feedback
While it is natural to want to feed back the position of the point of interest, the nonminimum phase nature
of the flexible link arm results in instability. Nonminimum phase in linear cases results from zeros of the
transfer function in the right half plane. The output can be modified to be passive and of minimum phase
by closing an inner loop or by redefining the output as a modified function of the measured states. For
example, if tip position is computed from a measured joint angle θ and a measured deflection variable δ for
a link of length l, the form of the equation will be (tip position) = lθ +δ and the system is nonminimum
phase. If, on the other hand, the (reflected tip position) = lθ − δ is used for feedback control, the system
is passive and can be readily controlled for moderate flexibility [20]. Obergfell [21] measured deflection
of each link of a two link flexible arm and closed each inner loop using this measurement. Then a vision
measurement of the tip position was used to control the passified system with a simple controller. He used
classical root locus techniques to complete compensator design. The device and the nature of the results
are shown in Figure 24.6 and Figure 24.7.
24.3.2.5 Sliding Mode Control
Slidingmode controloperatesintwophases. First, thesystemis driven instatespacetowarda sliding surface.
On reaching the sliding surface, the control is switched in a manner to move along the surface toward the
origin, set up to be the desired equilibrium point. The switching operation permits an extremely robust
behavior for many systems, but if there are unmodeled dynamics, the abrupt changes may excite these
modes more strongly than other controllers. Given the concern for robustness with model imperfections
and changes, the sliding mode has a natural appeal. The implementation of sliding mode control is subject
to some of the same problems as state feedback controllers; that is, knowledge of the state is difficult to
obtain by measurement. Frame [22] has used observers based on a combination of joint position, tip
acceleration, and tip position (via camera) measurements. The results are recent and, while promising,
have not produced a clear advantage over state feedback.
24.3.3 Open Loop and Feedforward Control
Three matters for discussion in this section are the initial generation of the motion trajectory for a flexible
link system, either the end point or the joints and the modification of an existing trajectory to create a more
compatible input. Finally, by observing the errors in tracking a desired trajectory, the learning control
approach can improve the trajectory on successive iterations, reducing the demands on the feedback
control.
Copyright © 2005 by CRC Press LLC

24
-32 Robotics and Automation Handbook
FIGURE 24.6 The experimental arm RALF (Robotic Arm Large and Flexible). (Total length about 6 m, lowest natural
frequency about 3 Hz.)
24.3.3.1 Trajectory Specification
Among the most popular trajectory forms is the trapezoidal velocity profile that results from the desire
to move in minimum time from point to point, with constraints on acceleration and velocity. This bang-
bang solution creates extreme values of jerk (the third derivative of position) and consequently excites the
flexible modes of an arm. A modified approach consists of also limiting the value of jerk and minimizing
move time under this new constraint.
24.3.3.2 Filtering of Commands for Improved Trajectories
Small changes in the speed along a given path of motion can have major changes in the resulting vibration
of a flexible arm. This is because the excitation is largely the result of jerk, the second derivative of
speed, and is not readily apparent to someone planning a velocity profile, much less a position profile.
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-33
–1.84 –1.82
–1.8
Tip x-position (m)
Tip y-position (m)
–1.78 –1.76
5.14
5.16
5.18
5.2
5.22
5.24
(a)
–1.84 –1.82 –1.8 –1.78 –1.76
5.14
5.16
5.18
5.2
5.22
5.24
Tip x-position (m)
Tip y-position (m)
(b)
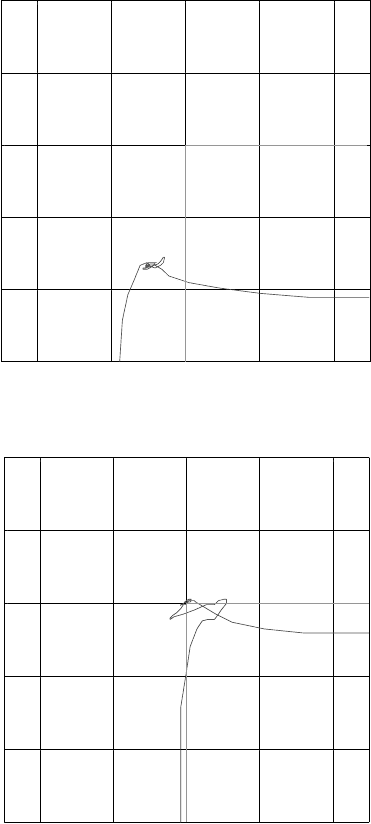
FIGURE 24.7 (a) Path followed without tip position feedback. (Commanded trajectory is a square, partially shown
in green and actual trajectory in red.) (b) Path followed with tip position feedback. (Commanded trajectory is a square,
partially shown in green and actual trajectory in red.)
Filtering the nominal input trajectory can make small adjustments to all trajectories entered and relieve
the end user from this task. Filters commonly used are the low pass filter, notch filter, and the time delay
filter.
Low pass filtering can be performed by either digital or analog means. Typically a cutoff frequency and
a rate of roll off are determined. The rate of roll off is determined by the order of the filter n (number
of integrators required), and the cutoff frequency is determined by the selection of parameters. Standard
techniques for parameter selection are available [23], and filter poles are placed according to standard
patterns. The analog Butterworth filter of order n, a popular low pass filter, is based on 2n poles evenly
Copyright © 2005 by CRC Press LLC
24
-34 Robotics and Automation Handbook
spaced around a circle, symmetric about the real axis, and no zeros. The stable poles are maintained in the
filter design. The filter can then be converted to a digital filter by various mapping techniques. Chebyshev
filters have poles similarly placed about an ellipse, and superior frequency domain specifications are
achieved in the pass band but with some fluctuations in the magnitude of the response. For filtering the
robot trajectory, we are also concerned about the time response of the filter itself and do not want the filter
to insert oscillations of its own. Implementation of a low pass filter such as a Butterworth filter results in an
infinite impulse response (IIR) filter as a result of the system poles. Theoretically, the response to an input
never dies out. Artifacts of the filter include phase shift and an extension of the period of time over which
the commanded motion continues. In the design of the low pass filter the engineer must base the cutoff
frequency on the vibration frequencies of the arm. All components with frequencies above the cutoff are
reduced in magnitude.
Time delay filtering is readily implemented with a digital controller but not with an analog controller.
Effectively, every finite impulse response (FIR) filter is a time delay filter. The input is received by the filter,
and the output based on that input is given for only a finite time period thereafter. When implemented
by a digital delay line with n delays of time T and a zero-order hold, a single input enduring for a period
T would produce n outputs that were each piecewise constant for each period of time T. While low pass
and other filters can be implemented in FIR form, our interest is with a specifictypeoffilter that places
zeros at appropriate places to cancel arm vibrations. The placement of these zeros requires knowledge of
the arm’s vibrational frequency. When contrasted with the IIR filter, the FIR filter stretches the input by
only a known time, at most nT. The operation of this filter is explained by a combination of time response
and frequency response.
The early version of a command shaping filter [24, 25] suffered from excessive sensitivity to variations
in the plant. Since then a revised form was proposed [26], and a number of researchers have explored
variations on this theme [27, 28, 29, 30]. The problem of sensitivity has been addressed in several ways that
can be grouped into two approaches: increase robustness or adapt the filter [31]. Increasing robustness
allows the resonant frequencies to drift somewhat during operation while remaining in a broadened notch
of low response. The notch is broadened by placement of multiple zeros. Unfortunately this requires
additional delay in completing the filtered command. The time-delay filter in various forms has become a
widely used approach to canceling vibration with minimal demand on controller complexity and design
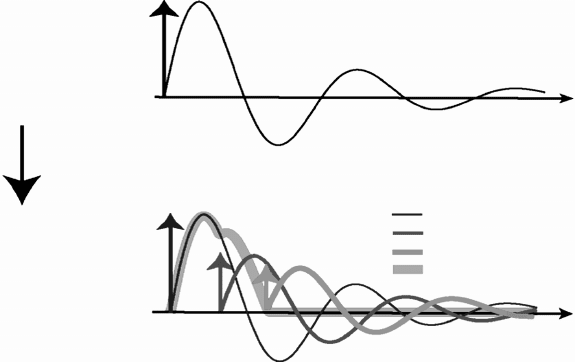
sophistication. Its effectiveness can be understood in terms of the superposition that linear systems obey.
An impulse input is separated into several terms, which when combined by superposition cancel the
vibration as shown in Figure 24.8.
Single Impulse
Shaped with
a Three-Term
Command Shaper
1st Impulse Response
2nd Impulse Response
3rd Impulse Response
Resultant Response
Single Impulse
0
time
time
0 ∆ 2∆
FIGURE 24.8 Effect of three term OAT command shaping filter.
Copyright © 2005 by CRC Press LLC