Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

25
Robotics in Medical
Applications
Chris A. Raanes
Accuray Incorporated
Mohan Bodduluri
Restoration Robotics, Inc.
25.1 Introduction
25.2 Advantages of Robots in Medical Applications
25.3 Design Issues for Robots in Medical Applications
25.4 Research and Development Process
25.5 Hazard Analysis
Hazard Identification
•
Verification and Validation
•
Initial and Final Risk Legend
•
Likelihood Determination
•
Severity Determination
•
Risk Acceptability
25.6 Medical Applications
Noninvasive Robotic Surgery — CyberKnife
®
Stereotactic
Radiosurgery System
•
Minimally Invasive Robotic Surgery —
da Vinci
®
Surgery System
•
Invasive Robotic Surgery —
ROBODOC
®
Surgical Assistant
•
Upcoming Products
25.1 Introduction
The use of robots in medical applications has increased considerably in the last decade. Today, there are
robots being used in complex surgeries such as those of the brain, eye, heart, and hip. By one survey, 2285
medical robots were estimated to be in use at the end of 2002, and that number is expected to rise to over
8000 medical robots by 2006. It is also estimated that medical robots may, in the end, have the largest
market value among all types of robots.
Complex surgeries have complex requirements, such as high precision, reliability over multiple and long
procedures, ease of use for physicians and other personnel, and a demonstrated advantage, to the patient,
of using a robot. Furthermore, all new technologies in the medical area have to undergo strict regulatory
clearance procedures, which may include clinical trials, as outlined by various government regulatory
agencies. In the U.S., the Food and Drug Administration (FDA) has jurisdiction over medical devices. As
more and more devices get through the regulatory procedures, there will be more and more robots in the
medical world.
25.2 Advantages of Robots in Medical Applications
Before one can consider the usage of robots in medical applications, it is important to understand that
medical applications have unique requirements, different from general, or “traditional,” robot design.
Some of the design issues and associated advantages are described below.
1. Highprecision: Modernrobots are demonstratedtobe highly precise.The precisionrange depends
on the robot and the application, of course, but it is generally accepted that for a given application,
Copyright © 2005 by CRC Press LLC

25
-2 Robotics and Automation Handbook
a robot can be designed to meet or exceed the precision requirements of the application. A typical
industrial robot has repeatability specifications measured in tenths of a millimeter. A representative
ratio of motion in robotic assisted surgery is that a 1 cm movement of a doctor’s hand translates to
a 0.1 cm movement of the robotic tool.
2. Heavy payloads: Modern robots can carry heavy payloads over large workspaces, at high speeds,
with high precision. Industrial robots are available with payload capacity of a few ounces to over
1000 lb.
3. Workspace: Medical robot workspace requirements tend to be significantly larger than industrial
needs because of patient relatedfactors, such as uncertainty in patient location during the procedure
and safety requirements. There is an obvious overriding need to avoid any hazard to the patient,
physician, and other medical personnel; this drives an exclusionary zone around the patient, doctor,
andother equipmentthat maybeattached tothe patient. Thanks to the advancesdrivenbyindustrial
applications, the workspace of most available robots is significant and can be utilized for medical
applications.
4. High Speed: Most new robots have been designed and optimized for industrial automation, en-
abling them to move at high speeds with high precision. The majority of medical applications do
not require robots to move at high speeds as these robots are working on a patient. Reassurance,
comfort, and safety dictate the robot’s speed in medical applications.
5. Reliability: Industrial robots are designed to work round the clock without stopping; their medical
counterparts work only a few hours a day. The nature of medical applications is that most of the time
is taken up by other parts of the surgery, such as operating room preparation, patient preparation,
and postoperative procedures. The robots actually perform surgeries for only a limited time, around
10% of surgery time. The resulting reliability numbers for medical work are excellent, leading to
very limited downtime.
6. Tedium: Most of the medical applications where robots are sought involve repetitive tasks over
a very long period of time. Some surgeries last for many hours, during which the operators are
requiredto repeat taskshundredsor thousands of times. Obviously, robotsdo not have anyproblems
with tedium.
7. High Quality: Robotic assisted surgery can help a wide variety of doctors perform complex surg-
eries with the same high quality previously achieved only by some accomplished surgeons. Addi-
tionally, most medical procedures cannot tolerate any degradation in quality due to trembling or
unsteadiness of hands. Robotic systems in the operating room can compensate for imperfections
in the user due to age, fatigue, or other factors, without degrading the quality of care administered
to the patient.
8. Computer control: Robotic surgery is able to capitalize on available diagnostic data to calculate an
optimized approach to treatment. Most modern systems use fusion of multiple imaging modalities
such as CT, PET, and MRI.
9. Remote operation: Finally, because robots are typically controlled by computers and/or remote
electrical signals, the option exists to remotely operate the units over large distances through direct
data links, or even over the internet (telerobotics).
People have recognized many of these obvious advantages; therefore, we have seen a considerable
increase in usage of robots in medical applications in recent times. As these advantages are general and
apply to many medical procedures, the authors believe that it is just a matter of time before more robots
are employed in automating a variety of procedures, ultimately increasing the quality while reducing the
cost of medical care in the future.
25.3 Design Issues for Robots in Medical Applications
Using robots in medical applications presents a unique set of challenges. This section briefly discusses the
design issues that should be considered in many medical applications.
Copyright © 2005 by CRC Press LLC

Robotics in Medical Applications 25
-3
1. Safety: Safety of patients and users is the ultimate concern when using robotics in medical applica-
tions. In the industrial world, safety is addressed, most typically, by ensuring that humans are not
present in the robot’s workspace. Considerable precautions are taken so that no one inadvertently
enters the workspace of a working robot, and if someone does enter the area, the robot is automati-
cally stopped. In the case of a medical application, by definition, a human being (the patient) needs
to be in the workspace. Moreover, the physician and other medical personnel generally need to be
in the workspace as well to attend to other needs of the patient and the surgery. A robotic system,
therefore, has to be designed so that it is safe for the patient, physician, and other personnel in the
room while it is effectively operating on the patient.
2. Uncertainty of position: Most medical applications have a higher level of uncertainty in the posi-
tion of the target (patient) than their industrial counterparts do. In a typical industrial application,
one can expect the workpiece to be aligned and mounted precisely in the same location and ori-
entation. In a typical surgery, the patient and the specific organ that needs to undergo surgery
cannot practically be located in the same location and orientation. Furthermore, various steps in
the procedure will likely have to be modified and adapted based on the patient’s condition.
3. Fail-safe: It is required that the medical robotic system operates in a fail-safe mode. By fail-safe,
one means that if and when any component fails, the system reaches a safe state, thus minimizing
chance for injury or death to the patient or other personnel.
4. Power/SystemFailure: The system needs tobe designed in sucha waythat in case of a power/system
failure, the physician can move the robot away to keep the patient safe and be able to attend to the
patient.
5. Record Keeping: All records related to an operation need to be kept and protected for future use.
This issue has become more acute in recent times with current U.S. and international regulations
regarding patient data privacy. The opposing needs of the system are to maintain confidentiality,
while ensuring that the patient on the table matches the program in the robotic system.
6. Regulatory Issues: All design, development, and production activity needs to be done in a con-
trolled fashion following the appropriate regulatory guidelines.
The issues outlined above are in addition to the technical issues one has to deal with for any product
design. It is obvious that these additional requirements add a significant cost in terms of time and resources
to successfully design, develop, and deploy a product in the field.
25.4 Research and Development Process
It is essential, as well as required (by FDA regulations in the U.S.), that an organization strictly adheres
to a process in the design, development, and manufacturing stages of a product. The specificity of the
processvaries from organization to organization, but all the different processes follow good manufacturing
practices (GMP) and good laboratory practices (GLP). See FDA’s document Title 21, Part 820 for the
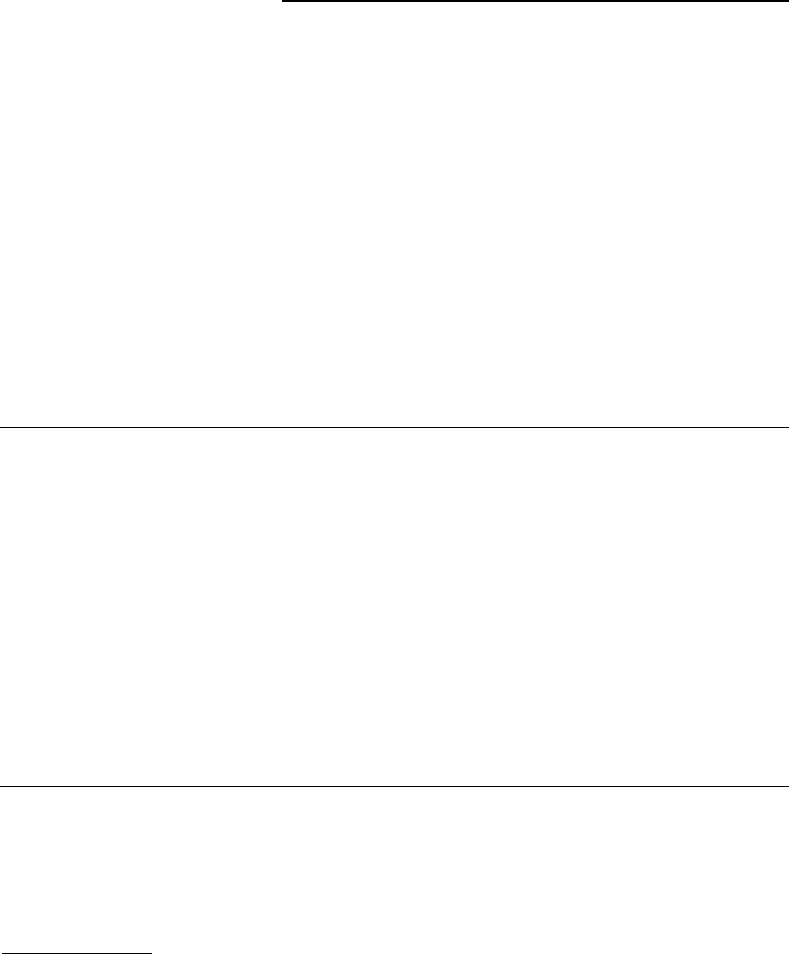
guidance on quality systems regulation. Figure 25.1 shows an example of a research and development
process.
The research and development process shown in Figure 25.1 shows four stages of the development:
1. Requirements Definition
2. Concept Development
3. Feasibility Studies
4. Product Development
While it is important to maintain good documentation throughout each of these stages of development,
design control procedures are especially necessary during the product development phase. Please refer to
Title 21, Part 820.30 for guidance from the FDA on design control procedures.
Copyright © 2005 by CRC Press LLC
25
-4 Robotics and Automation Handbook
Product Research and Development Process
User Requirements Definition
Collect and review
• Market opportunities
• Customer expectations
• Clinical advice
• Safety requirements
• Regulatory requirements
Initiate Project
Project Initiation Memo:
• Goal statement
• Initial requirements
Concept Development
Concept Selection
Project Feasibility Plan:
• Preliminary requirements
• Preliminary design
Evaluate Design Alternatives
• Technical challenges/risks
• Resource needs
• Schedule and costs
• Refine requirements
• Review and report
Design History File
Product Development
Engineering and Manufacture
• Software specifications
• Hardware specifications
• Design Reviews (PDR, CDR)
• Engineering qualification
• Initial engineering release
• Verification test plans
• Human use studies
Commit to Development
Project Management Plan:
• Requirements
• Feasible design
• Cost and schedule
Medical Input
Feasibility Studies
Prototype Development
• Draft requirements
• Resolve technical issues
• Refine schedule
• Refine resource needs
• Refine cost estimates
• Review and report
FIGURE 25.1 An example of research and development process.
25.5 Hazard Analysis
As mentioned in the previous sections, safety is the first and foremost concern of using robots in medical
applications. To address this issue, a formal hazard analysis is done during the design process. This section
describes a typical hazard analysis (based on EN60601-1-4).
25.5.1 Hazard Identification
Preliminary hazards are identified from
r
Requirements specifications
r
Architecture and design descriptions
r
Previous hazard analysis results
The preliminary hazard list is updated into the final hazard list by the addition of hazards identified
during fault tree analysis. The final hazard list is revised from time to time as the product undergoes
changes.
25.5.2 Verification and Validation
Fault tree analysis (FTA) will be done on the hazards identified. This will identify states within the system
that could cause a hazard. Recommendations will be made to test these states. Code or design change
recommendations will also be made if necessary.
Copyright © 2005 by CRC Press LLC
Robotics in Medical Applications 25
-5
25.5.3 Initial and Final Risk Legend
The risk codes used in the hazards list initial and final risk columns are composed of a letter indicating
likelihood and a number indicating severity.
25.5.4 Likelihood Determination
Likelihoods of hazards are defined according to the table below. Entries here follow the EN 60601-1-4
suggested rankings for a programmable electrical medical system (PEMS).
ID Likelihood Description
A Frequent Likely to occur frequently or continuously during the product lifetime
B Probable Likely to occur several times during the product lifetime
C Occasional Likely to occur sometime during the product lifetime
D Remote Unlikely to occur during the product lifetime
E Improbable Possible but extremely unlikely to occur during the product lifetime
F Impossible Cannot occur given the current product makeup
25.5.5 Severity Determination
Severities of hazards are defined according to the table below. Entries here follow the EN 60601-1-4
suggested rankings for a PEMS.
ID Severity Description
1 Catastrophic Potential for multiple deaths or serious injuries
2 Critical Potential for death or serious injury
3 Marginal Potential for minor injury
4 Negligible Little or no potential for injury
Hazard severities areassigned accordingto the anticipatedseverity of a single incidentor accidentresulting
from that hazard. In particular, the severity rating does not reflect the possibility that the hazard could
cause multiple incidents or accidents over the life of the product or at multiple product installations. These
aspects of the hazard are reflected in the likelihood rating.
25.5.6 Risk Acceptability
Acceptability of risk is assessed according the following table:
Likelihood
A-Frequent
ALARP Unacceptable Unacceptable Unacceptable
B - Probable
ALARP ALARP Unacceptable Unacceptable
C - Occasional
ALARP ALARP ALARP Unacceptable
D - Remote
Acceptable ALARP ALARP ALARP
E - Improbable
Acceptable Acceptable ALARP ALARP
F - Impossible
Acceptable Acceptable ALARP ALARP
4 - Negligible 3 - Marginal 2 - Critical 1 - Catastrophic
Severity Level
ALARP: As low as reasonably practical.
Copyright © 2005 by CRC Press LLC

25
-6 Robotics and Automation Handbook
25.6 Medical Applications
As pointed out earlier in the chapter, Robots in medicine offer several potential advantages:
r
They do not tire.
r
They do not become inattentive.
r
They do not suffer from human “frailties” such as shaking or jittering.
r
They are more accurate.
Studies have shown that a surgeon’s skill is one of the most significant factors in predicting patient
outcomes. One of the goals of medical robotics is to minimize this difference between surgeons.
In the remainder of this chapter, we review three different products as examples of robotics in medicine
as well as provide an insight into new and upcoming medical products. The three products highlighted
belong to the categories of noninvasive surgery, minimally invasive surgery, and invasive surgery in terms
of the procedure being automated. We study noninvasive applications in more detail than others, as the
authors believe that noninvasive surgery will bring unique opportunities in advancing the state of medicine
in the future.
25.6.1 Noninvasive Robotic Surgery --- CyberKnife
®
Stereotactic Radiosurgery System
25.6.1.1 Introduction to Stereotactic Radiosurgery
Radiation has been widely used over many decades to treat cancerous tumors and other malformations in
various partsof thebody in a noninvasive fashion. Therearetwoforms of radiationtreatments, radiotherapy
and radiosurgery. Radiotherapy treats the tumors with low amounts of radiation per session over many
sessions, while radiosurgery treats the tumors with high amounts of radiation per session over one or a
few sessions. Radiotherapy relies on the differential response of the tumor and the surrounding normal
tissue, whereas the radiosurgery relies on very high, ablative doses of radiation delivered accurately to the
tumor while minimizing the radiation to the surrounding normal tissue.
Delivering high amounts of radiation into a tumor while minimizing the radiation to the surrounding
tissue is achieved by radiosurgery systems by delivering narrow beams from numerous (hundreds) angles
all pointed into the tumor. The cumulative dose in the tumor where all the beams cross will thus be
very high to eradicate the tumor, while the surrounding tissue where the beams are not overlapping
receives low amounts of radiation. This technique was pioneered by Leksell (1951) and Larsson et al.
(1958).
Because delivering high amounts of radiation in order to knock out the tumor is the primary focus of
the radiosurgery, it is important to understand that accuracy immediately becomes a big issue. The error
in the delivery system of this high amount of radiation directly increases the amount of surrounding tissue
damaged in order for the entire tumor to receive the prescription dose.
25.6.1.2 Project Background
In the early 1990s, a project was launched to develop frameless radiosurgery, which, in principle, can then
be applied anywhere in the body (including brain treatments), as the frame limitation would not exist
anymore. As described above, radiosurgery is characterized by the following attributes:
1. Narrow beams
2. Numerous (hundreds) beams from various approach angles
3. High accuracy
4. Single or few treatments
Copyright © 2005 by CRC Press LLC
Robotics in Medical Applications 25
-7
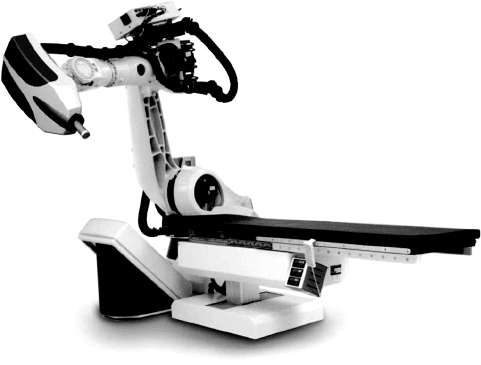
FIGURE 25.2 CyberKnife
®
stereotactic radiosurgery system. (Source: Accuray, Inc.)
25.6.1.3 CyberKnife
®
System
The CyberKnife stereotactic radiosurgery system, produced by Accuray, Incorporated, of Sunnyvale,
California, achieves frameless stereotactic radiosurgery using robotics and image guidance (see
Figure 25.2). The CyberKnife system has the following major components:
1. Linear accelerator (radiation source)
2. Six axis robotic manipulator
3. Stereo x-ray imaging system
4. Patient positioning system
5. Computer software
The linear accelerator produces a 6 MeV radiation beam which can be collimated to various sizes (5 to
60 mm diameter) based on the size of the tumor to be treated. The linear accelerator is mounted as the
tool of the robot manipulator; therefore, it can be positioned and aimed at the patient arbitrarily as per the
treatment needs. Two x-ray sources and cameras are used to monitor the patient, and patient movements
are calculated and communicated to the robot which then compensates for the patient movement. The
treatment delivered is accurate, frameless, effective, and elegant.
We br iefly describe the major components in the following sections.
25.6.1.3.1 Radiation Source
The radiation source consists of a pulsed electron gun combined with a waveguide that uses microwave
energy to accelerate the electrons into a tungsten target. The result isa6MeVx-raybeamthat can be
collimated into a diameter as small as 5 mm. This radiation source is known as a linear accelerator and is
commonly called a “linac.” The weight of the linac is approximately 165 kg and must be manipulated by
the robot to accommodate tumor movement.
25.6.1.3.2 Robot Manipulator
An industrial robot (KUKA KR210), typically used in the automotive industry, is adapted for this medical
device. The robot can carry a tool of weight up to 210 kg, with a maximum speed of 2 m/sec and a
repeatability specification of 0.2 mm. This robot has a reach of 2.5 m or more which makes it more
than adequate for positioning the linear accelerator to precisely aim at the patient from various different
approach angles.
Copyright © 2005 by CRC Press LLC
25
-8 Robotics and Automation Handbook
25.6.1.3.3 Stereo X-ray Imaging System
The imaging system consists of two x-ray sources mounted to the ceiling of the treatment room and a pair
of x-ray cameras mounted in a “V”-shaped frame and fixed to the floor. Amorphous silicon detectors are
used to provide 20 ×20 cm x-ray images. The distance between the camera and patient is approximately
65 cm, which eliminates most of the scatter radiation. The distance between the patient and the x-ray
source is approximately 260 cm, which provides the robot ample access to the patient during the patient
treatment.
25.6.1.3.4 Patient Positioning System
The patient positioning system provides precise location of the patient relative to the imaging system.
Appropriate location of the tumor and landmarks in the field of view of the cameras, with appropriate
x-ray illumination, enhances tracking performance. However, once in position the system remains fixed
throughout treatment. Patient movement during treatment is accommodated by the robot manipulator.
25.6.1.3.5 Computer Software
A high-end computer provides software integration to the system. It supports both the treatment planning
and the treatment delivery software. The system is designed to have a fixed set of nodes on a sphere,
from which treatment beams can be delivered. A treatment plan consists of a dose rate, duration, and
direction at each node. The robot moves sequentially through each of the nodes and delivers the required
dose.
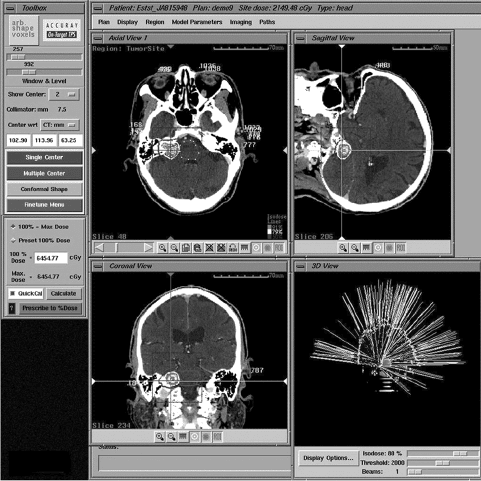
The treatment planning system (see Figure 25.3) allows the physician to specify radiation dose distribu-
tions in the tumor and surrounding tissue. The planning algorithm translates this into dose rate, duration,
and direction at each of the treatment nodes.
On the dayof the treatment, the patient lies on the couchof the patient positioning system.The treatment
plan is selected and the system assists the operator in aligning the patient in the center of the imaging
system. This is done by acquiring x-ray images using the diagnostic x-ray sources and cameras. Once the
patient is aligned the treatment begins.
FIGURE 25.3 Treatment planning system for CyberKnife
®
. (Source: Accuray, Inc.)
Copyright © 2005 by CRC Press LLC
Robotics in Medical Applications 25
-9
During the patient treatment, the robot moves the linear accelerator through each beam position and
orientation. Before each irradiation, a pair of orthogonal x-ray images of the patient is obtained and the
movement of the patient is calculated. This information is transmitted to the robot, which compensates
for the patient movement before the therapeutic beam is turned on. This process is repeated through all
the nodes to complete an entire treatment.
25.6.1.4 Patient Safety
The system is designed with patient safety in mind, from treatment planning all the way through the
treatment delivery. The treatment planning system limits the use of the robot to its known safe positions
(nodes), so the treatment planned by a physician is always guaranteed to be safe during delivery. Further-
more, the treatment planning system provides a computer simulation of treatment and automatically flags
any potentially dangerous movements of the equipment close to the patient.
During treatment delivery, the system monitors the robot movement in real time, and if any impending
collisions are detected, the machine is stopped immediately. Furthermore, an operator is required to
monitor the treatment through multiple video monitors and can issue an emergency stop to the system
when any out-of-the-ordinary movementsof the system or the patient are observed.Anystopped treatment
can be resumed and completed with no adverse effects to the patient.
Fail-safe operation of the CyberKnife has also been designed in. For example, any fault condition, either
detected by the system automatically or issued by the operator, immediately stops all the radiation and
any robotic movement, thus causing the system to reach a safe condition during a failure. Furthermore,
the operator can use the pendant to move the robot away in order to attend to the patient, if necessary.
25.6.1.5 System Accuracy and Calibration
A system centerpoint called the isocenter is identified in order to calibrate the installation of the imaging
system and the robot in the treatment facility. The alignment of the cameras and location of the sources
places the image of the isocenter within 5 mm of the center of both cameras. A calibration process identifies
variations in location over the face of the camera to account for small variations. The imaging system’s
accuracy is better than 1 mm.
The installation of the robot determines the orientation of the user frame which has its origin at the
isocenter. The tool frame is identified by measuring the position and orientation of the line from the
laser-mounted coaxial to the therapeutic beam in the linear accelerator. Further calibration involves an
automatedprocessin whichthe robotilluminatesan isocrystaland searches for the position and orientation
that provides the maximum signal. A correction look-up table is maintained by the system. The residual
error of the robot positioning system is less than 0.5 mm.
The total clinically relevant system accuracy, from treatment planning through delivery, is measured by
exposing a film cube in a phantom and is found to be within 0.95 mm.
25.6.1.6 Robotic Advantages
Using a robot in the CyberKnife brings distinct advantages to the system. The ability to deliver a beam that
can originate at an arbitrary point and can be aimed arbitrarily, brings an enormous level of flexibility in
designing the treatments. Complex treatments can be generated that conform to the oddly shaped tumors
(see Figure 25.4).
In addition, robotics makes the CyberKnife the only technology that is able to treat a moving tumor.
Thanks to the advancement of robotics and computer vision, the CyberKnife is able to track a lung tumor
accurately through the entire breathing cycle to deliver treatments.
25.6.2 Minimally Invasive Robotic Surgery --- da Vinci
®
Surgery System
As opposed to the CyberKnife system, which is a noninvasive robotic medical device, the da Vinci system
is a minimally invasive robotic system. The term “minimally invasive” in the medical world means that the
surgery is performed with small incisions (also called laparoscopic surgery) in place of traditional surgery.
Copyright © 2005 by CRC Press LLC
25
-10 Robotics and Automation Handbook
FIGURE 25.4 The dose radiation and dose distributions are planned on the CT slices directly. Simulation of the
treatment allows verification of the dose distributions. (Source: Accuray, Inc.)
The da Vinci, a product of Intuitive Surgical, Inc., of Sunnyvale, California, brings telerobotics into the
world of medicine. Telerobotics was originally developed to perform remote tasks by the robots. It enables
a human to remain in a safe environment while directing the robots to perform complex and dangerous
tasks in a remote and/or dangerous environment.
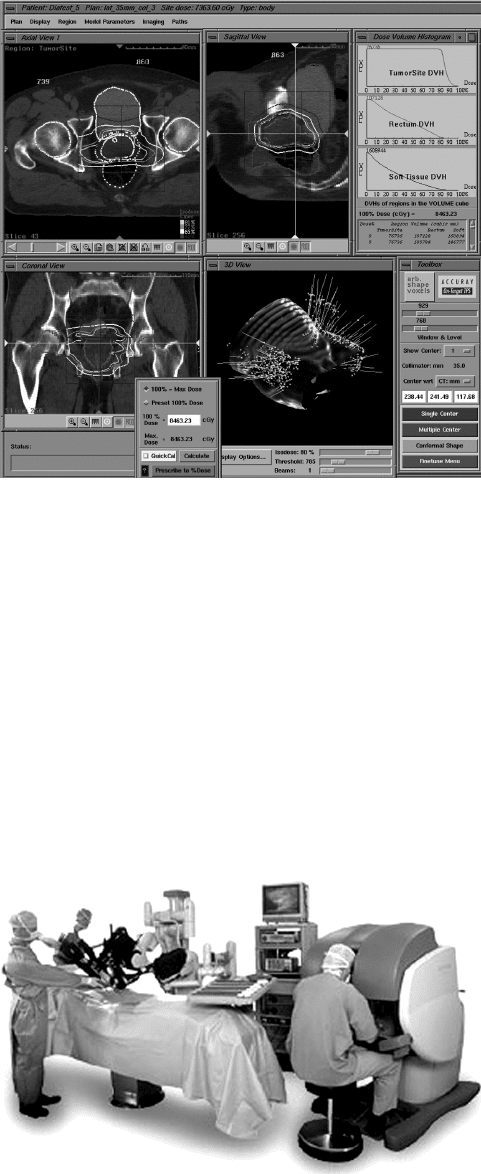
The da Vinci, being a telerobotic device, is operated by the surgeon remotely (see Figure 25.5). The
robot system is composed of multiple arms manipulating various instruments inserted into the patient
through tiny ports. One of the instruments is a camera with a light source to see the anatomy as well as the
surgical instruments. The surgeon operates while seated comfortably (away from the patient, yet still in
the operating room) at a console monitoring a 3D image of the surgical field. The surgeon’s fingers grasp
the master controls with hands and wrists, and the surgeon’s movements are translated into the actual
movements of the instruments by the robots, thus performing the surgery telerobotically.
FIGURE 25.5 da Vinci
®
surgery system. (Source: Intuitive Surgical, Inc.)
Copyright © 2005 by CRC Press LLC