Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

Flexible Robot Arms 24
-35
Input series
coefficient 2
coefficient 3
coefficient 1
delay ∆
delay 2∆
Shaped
output series
+
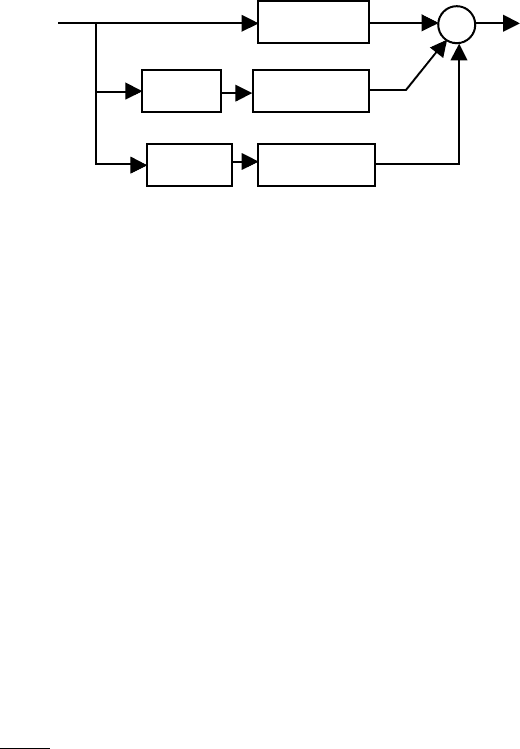
FIGURE 24.9 Time delay filter implementation.
It can also be understood by examining the frequency response of the two- and three-term filters. The
two-term filter is effectively the original deadbeat filter with a narrow notch indicating low robustness
(high sensitivity). Singer et al. [26] termed this the zero vibration or ZV shaper. A three-term filter with the
delay between terms equal to half the vibration period was called the ZVD shaper because the derivative of
the magnitude is also zero. The optimal arbitrary time-delay or OAT filter of Magee [27] also shown allows
the delay to be selected at will according to the equations for the coefficients given in Equations (24.96).
This is highly desirable if short time delay is needed, if delay needs to be matched to sampling time
multiples (usual for digital implementation), or if one desires to adapt the gains and thereby track known
or measured changes in the system behavior. Note, however, that robustness for the OAT filter is greatest
when the time delay is half the vibration period. When this is true, the OAT filter is equivalent to the ZVD
filter.
coefficient 1 = 1/M
coefficient 2 =−(2 cos ω
d
T
d
e
−ζω
n
T
d
)/M
coefficient 3 = (e
−2ζω
n
T
d
)/M
(24.96)
where
M = 1 −2cosω
d
T
d
e
−ζω
n
T
d
+ e
−2ζω
n
T
d
ω
d
=ω
n
1 −ζ
2
= damped natural frequency
ω
n
=undamped natural frequency
ζ = damping ratio
T
d
=time delay selected, an integer number of samples =
The OAT filter and other time delay filters are simple to implement as shown schematically in Figure24.9.
A delay line (memory) sufficient to hold 2π /ω
d
T samples of the input is needed. After the appropriate
delay the sample is taken from memory and multiplied by an appropriate coefficient as specified in
Equations (24.96), and the terms are added together to compose the output. If more than one mode of
vibration needs to be cancelled, two such filters are placed in series, resulting in a delay which is the sum
of the two periods. Note that multiple zeros result from a single filter. It may be possible (although maybe
not desirable) to cancel multiple modes with a single filter.
Adaptation of time delay filters based on measuring the system response has been proposed in many
ways.The obvious way of identifyingvibrational frequencies froman FFT and adjusting the gains according
to the design equation does not work as well as a direct adaptation of the OAT filter parameters based on
the measured residual vibration during periods when the arm should be at rest [32]. This does not work if
the arm does not have periods of rest or if the rest periods do not occur frequently relative to the variation
in parameters. Adaptation of the filter coefficients occurs during rest and after computation the updated
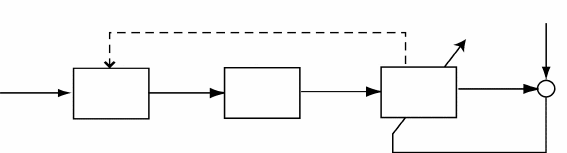
parameters are transferred to the filter for the next motion as shown in Figure 24.10. Adaptation of this
form is shown in Figure 24.11 to be very effective after only one repetition of the path.
Copyright © 2005 by CRC Press LLC
24
-36 Robotics and Automation Handbook
Input
Flexible
System
+
–
y
td
(
t
)
y
t
(
t
)
e
(
t
)
Transport the Updated
C
(
z
,
n
)
Copy of
C
(
z
,
n
)
ACS
C
(
z
,
n
)
FIGURE 24.10 Adaptive command shaping (ACS) modifies the filter C(z, n).
24.3.3.3 Learning Control
Learning control, in particular repetitive learning control, has been shown to dramatically improve the
accuracy of rigid robot tracking [33]. Of special interest here is the use of learning control in conjunction
with OAT filtering as described in the previous section [34]. Learning control remembers the error signal
that occurred on the last repetition of the motion and thereby supplements the feed forward signal based
solely on the input with a learned function appropriate for that corresponding time in the motion cycle.
As the motion is repeated the learned function progressively eliminates the need for an error correction.
Improvements of the accuracy of joint motion of more than an order of magnitude can result, effectively
eliminating all but the noise or unsystematic variation in the signal. While the joint movement becomes
more and more accurate, the tip motion may experience more vibration since the input trajectory is
followed more precisely, including all sudden changes in velocity. Also, vibration can no longer back drive
the joints and thereby dissipate the vibrational energy. If the input to the command has been prefiltered
with an OAT or other shaping filter, however, vibration cancellation is shown to improve. This is due to
the ability of learning control to overcome the systematic component of such imperfections as friction and
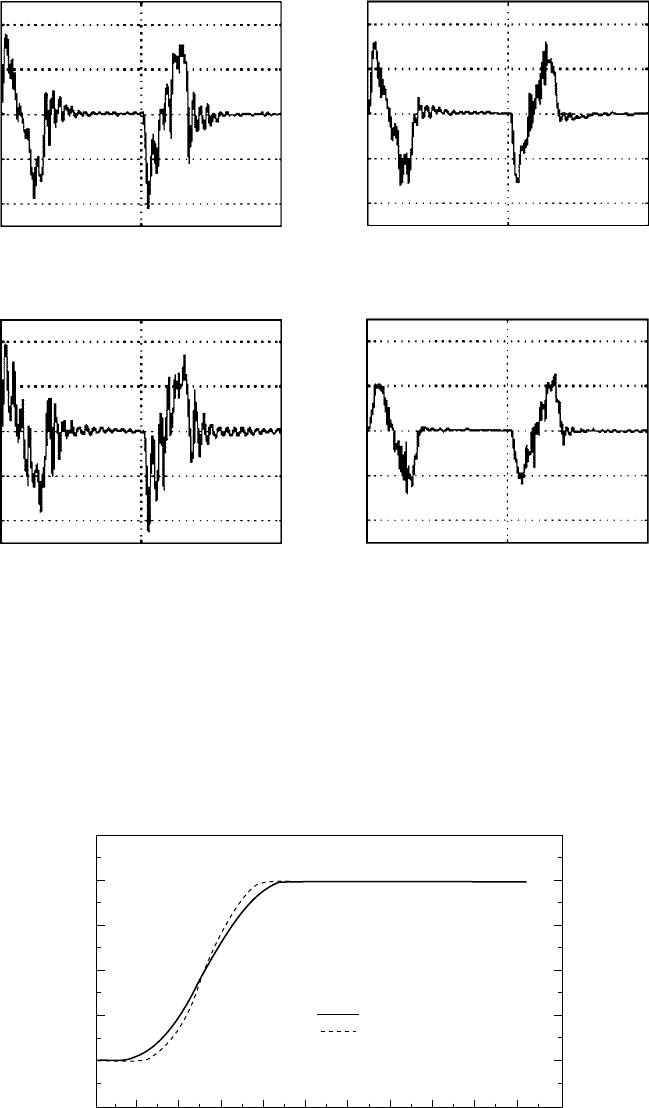
cogging of the motor. Figure 24.12 shows a comparison of the tip acceleration of a gantry robot for four
cases: PID only, PID plus OAT prefilter, PD and learning, and PD, OAT, and learning. This combination
has been shown effective in commercial situations for the often found situation of repeated motions. The
referenced paper also shows how to reduce the amount of memory required for storing the learned feed
forward command by using multiple rates of sampling for different parts of the control loop. Adding vision
or other tip position measurement can further eliminate errors due to static deflection [35].
24.3.3.4 Inverse Dynamics for Trajectory Design
The prior discussion of modeling included the development and discussion of the inverse dynamics
equations. The specification of tip motion is preferred or required since the tip carries the tool for the task.
Equations capable of doing this are presented above, but with the caveat about working with nonminimum
phase systems. For this important subset of flexible arms, which includes arms with flexible links, special
solution procedures must be considered. While complete discussion is beyond the scope of this article
and is a continuing research topic, an introduction is important to understand the limitations of current
techniques and the potential of future developments.
Consider for present purposes the linear form of the dynamic equations for a single joint moving a
single link which can be reduced to a transfer function. If the transfer function of the forward dynamics
has zeros in the right half plane, we do not want to apply the usual procedure to solve the inverse dynamics
for the causal form in which the response always follows the input. The inverse Laplace transform permits
another solution that is usually ignored but is appropriate here, the acausal solution. We effectively are
asking what the input should have been to get the response we want at time t. The input must precede the
output in the physical case, but for the computation, the input is the desired response and the output (of
the computation) is the necessary response. A practical solution procedure exists for separating the causal
and acausal solutions [36]. The rigid portion is specified to define the tip motion over time (using the
pinned-pinned mode shapes). The causal portion of the solution is based on initial conditions and solved
bymoving forward in time. The anticausal portionis solvedbackward in time startingwithfinal conditions.
The acausal solution for the driving torque is the sum of these three terms. By appropriate shaping of the
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-37
(a)
Tip Acceleration
(T
d
= 25 ms)
0 1 2 3 4 5 6 7 8 9 10
0.6
0.4
0.2
0
–0.2
Time (s)
0 1 2 3 4 5 6 7 8 9 10
–10
–5
0
5
10
Acceleration (V)
Displacement (micron)
0 1 2 3 4 5 6 7 8 9 10
–1
–0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
×4
Desired Joint
Trajectory
Coefficients C(n)
(b)
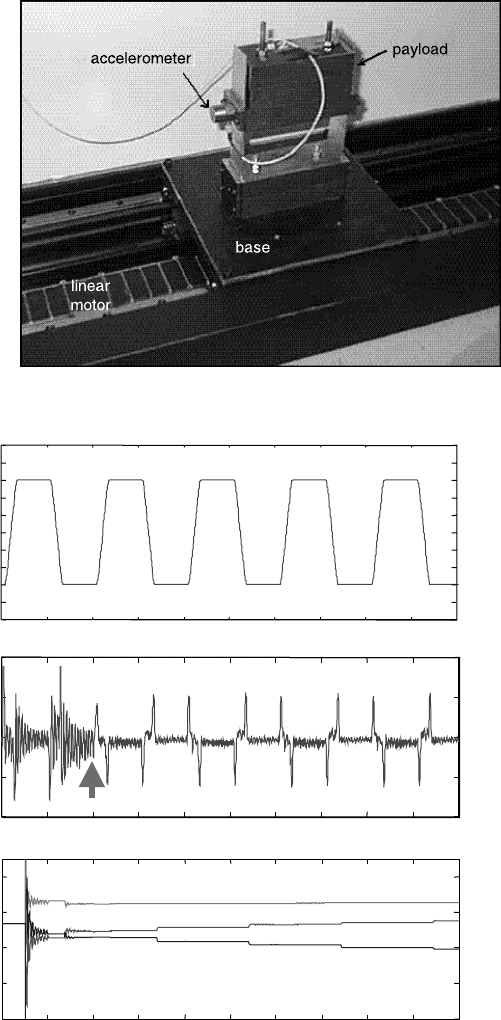
FIGURE 24.11 (a) Test bed for adaptive command shaping (dominant elastic mode at 16 Hz), (b) results of adaptive
command shaping. (Note reduced oscillation in acceleration after initial update at approximately 2 seconds as indicated
by arrow in acceleration plot. Delay time T
d
= 25 ms.)
Copyright © 2005 by CRC Press LLC
24
-38 Robotics and Automation Handbook
Tip Acceleration (PID Only) Tip Acceleration (PID and 1 OATF)
Tip Acceleration (PD and Learning) Tip Acceleration (PD, Learning, and 1 OATF)
2
–1
–2
1
0
0
Acceleration (Volt)
10.5
Time (s)
2
–1
–2
1
0
0
Acceleration (Volt)
10.5
Time (s)
2
–1
–2
1
0
8
Acceleration (Volt)
98.5
Time (s)
2
–1
–2
1
0
8
Acceleration (Volt)
98.5
Time (s)
FIGURE 24.12 Comparison of joint PID, OAT filtering, and repetitive learning combinations.
commanded joint motion of the nonminimum phase arm, the tip remains stationary after the joint moves,
then carries out the prescribed move and stops with no overshoot or vibration as shown in Figure 24.13.
As mentioned above under the feedback strategy of strain feedback, the desired history of strain or
other flexible variables is needed to effectively create a tracking controller. The inverse dynamics solution
gives a desired strain profile for the motion that can be applied to this end [37]. Neural networks have
Joint Angle (rad)
1.06
0.85
0.64
0.43
0.21
−0.00
−0.21
Generated Joint Trajectory
50
40
30
20
10
0
−10
Disp. (in)
Joint Angle
End Point Pos.
time (sec)
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2
FIGURE 24.13 Inverse dynamics trajectory moves joint before tip and leaves no vibration.
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-39
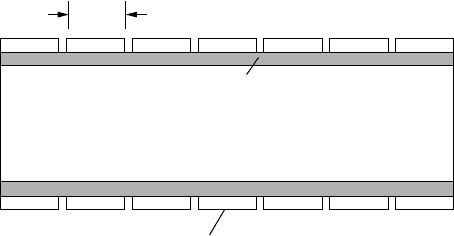
Optimum Section Length
Viscoelastic Layer
Flexible Beam
Sectioned Elastic Layer
FIGURE 24.14 Sectioned constraining layer for passive damping.
also been applied to learn the necessary inverse for relatively simple single link arms [38]. Extension to
multiple links has also been shown to be feasible [39, 40].
24.3.4 Design and Operational Strategies
24.3.4.1 Passive Damping Treatments
In the preceding discussion it has been apparent that we rely heavily on the truncation of the arm’s flexible
response to a finite number (one or two) of degrees of freedom when a perfect representation of distributed
flexibility would take an infinite number. This assumption should not be taken for granted. It can be made
more credible if the damping on the flexible modes is increased. Passive damping is an effective way to
do this. Constrained layer damping treatments have been shown to be effective in adding damping to all
modes of flexible beams used in laboratory robots [41]. These treatments sandwich a viscoelastic damping
material between the structural member, typically a beam, and a sectioned elastic constraining layer. The
Figure 24.14 illustrates this construction and Figure 24.15 illustrates the improvement in the damping
that results. Optimization of the length of the constraining layer sections depends on the frequency to be
damped, but damping effect is not extremely sensitive to this choice so that a wide range of frequencies
will be treated [42]. These works also show that the treatment can eliminate instability in the higher modes
not treated by the active controller.
24.3.4.2 Augmentation of the Arm Degrees of Freedom
How an arm is designed must be based on how it is to be used. In the case of flexible arms, this is also true,
with three examples presented below. By incorporating additional actuators on the arm with additional
degrees of freedom, a net gain in the performance of the arm can be achieved in spite of the physical
inevitability of elasticity.
24.3.4.2.1 Bracing Strategies
An anthropomorphic justification may be the most effective way to introduce bracing. Fine motor skills
of the human are concentrated in the fingers and gross motion capabilities in the arms, body, and even
the legs. We use them in a modular way on many occasions, bracing our wrists when typing, writing, or
threading needles. This permits a more stable base for fine manipulation during these precise motions.
Sizing an arm’s structure without bracing becomes a tradeoff between gross and fine motion. A short,
heavy, stiff, precise structure is best for fine motion and a long, light, and consequently flexible structure is
best for gross motion. Bracing enables one to have the second case when it is needed and then transition to
the use of the first case for fine motion. This concept was first explored [43] without consideration of the
overall implementation technology. The complexity of the maneuvers to move, achieve bracing contact,
and then manipulate have been enabled by relevant research [44, 45].
Copyright © 2005 by CRC Press LLC
24
-40 Robotics and Automation Handbook
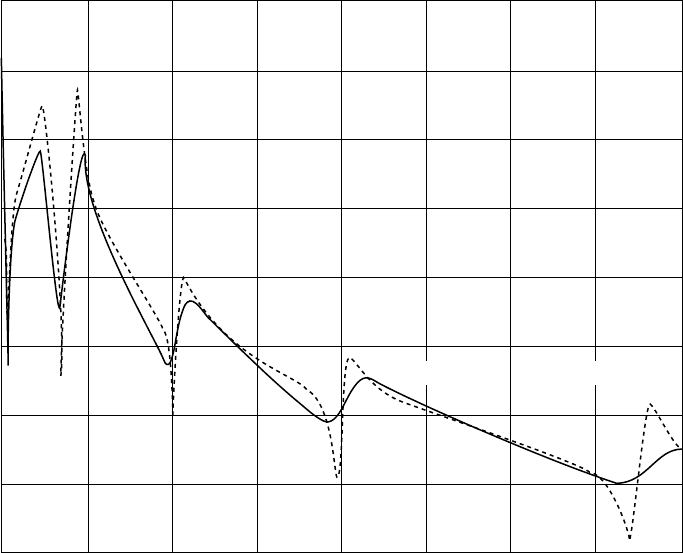
10 dB/division
damped case
undamped case
0 Hz. 160
FIGURE 24.15 Resonance reduction from passive damping in the magnitude of the hub velocity/hub torque transfer
function.
24.3.4.2.2 Inertial Damping
Bracing requires a stable surface to brace against, but if additional degrees of freedom exist, one can use
them to advantage even without a bracing surface. The reaction to the movement of a “micro manipulator”
at the end of the “macro manipulator” can be coordinated to absorb vibrational energy as shown by several
researchers [46, 47, 48]. Because the micro manipulator is typically short and effectively rigid, it can have a
high bandwidth that is needed to damp relatively high frequency vibrations that are above the bandwidth
of the actuators of the macro manipulator. Furthermore, the micro manipulator is collocated with the
tip of the macro manipulator and avoids the nonminimum phase problems of the macro actuators. Six
actuators in the micromanipulator can provide three forces and three torques where the micromanipulator
is mounted to the macro manipulator that can couple to any bending mode and remove energy. The
complexity results from the fact that complex motions may be needed to generate the forces needed. The
inverse dynamics equations to solve for the joint motions and torques to generate the prescribed forces
have been generated, but the full equations are complex and must in general be solved in real time to create
the reaction to vibration as it occurs. Simplified equations to generate a portion (say, only the forces) of
the six components of force and torque can be implemented, but stability cannot be guaranteed in this
case because the act of damping one mode with a force can excite another mode with a torque that was not
desired. Very effective damping has been generated for vibration of a single beam in two dimensions [49]
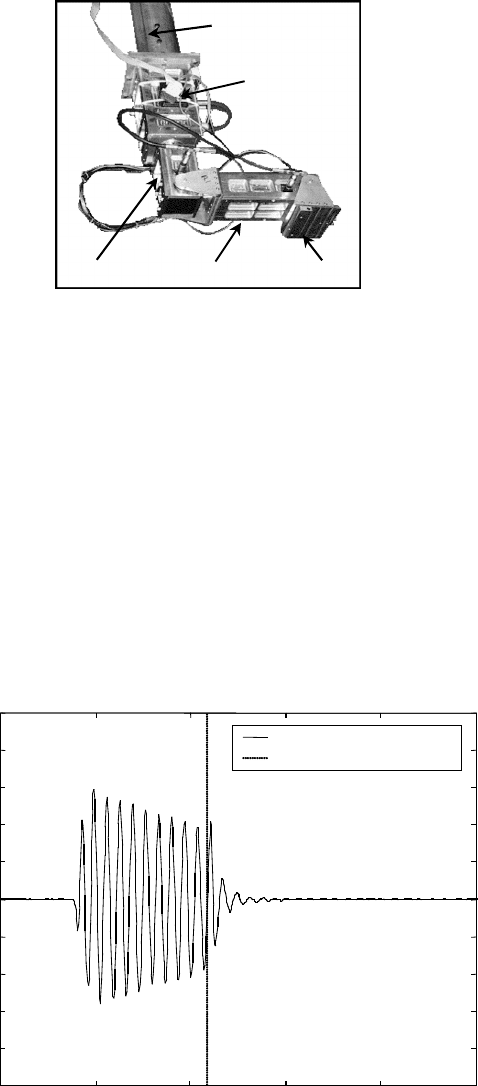
and two beams in series in three dimensions [50]. Figure 24.16 shows the micromanipulator on a flexible
mount that is representative of a macromanipulator. Figure 24.17 shows the effectiveness of the vibration
quenching on one of two axes. The other axis was similarly damped.
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-41
Link 3
Base Link
Link 1 Link 2
Beam (6 m long)
FIGURE 24.16 Three axis arm used as micromanipulator for inertial damping.
24.3.4.2.3 Piezoelectric Actuation for Damping
Thin layers of piezoelectric material (polymer, crystal, and ceramic forms exist) will change length upon
the application of a voltage. If the material is bonded to a beam the strain created by this action can be
used to deform the beam. By the same principle, the deformation of the beam creates a voltage across
the piezoelectric material. Vibrational energy can be dissipated by the current that results. In either a
passive or an active manner this transduction can be used for vibration control. The forces involved
are small but significant in some cases and may provide a solution for some vibration problems as has
been known for many years [51]. The ability to place patches of the material in optimum location for
critical modes is one of the key advantages of this approach, but instability can also result from incorrect
placement.
X-Axis Acceleration
Time at Start of Controller
0 5
1510 20 25
–0.5
–0.4
–0.3
–0.2
–0.1
0
0.1
0.2
0.3
0.4
0.5
Time (sec)
Acceleration (g)
Link I & II Actuation: Theta 1 = –45deg, Theta 2 = 45deg
FIGURE 24.17 Inertial damping controller quenches oscillations of flexible base. (Controller action started at vertical
line.)
Copyright © 2005 by CRC Press LLC

24
-42 Robotics and Automation Handbook
24.4 Summary
Elasticity of structural material is a pervasive and simple phenomenon that leads to unavoidable and
complex undesirable behaviors of mechanical arms and other motion devices. It can be treated simply in
some cases by adding structural material and consequent mass. Better ways to treat this phenomenon do
exist, and some of those techniques are discussed above. The motivation for these alternative approaches
includes examination of when the simple approach is inadequate or undesirable. This implies modeling
of both static and dynamic phenomena and how they lead to failure of the arm device. The failure of a
structure may be due to its strength, stability, or flexibility. If strength or stability (buckling) is the active
constraint, then a solution to flexibility is not needed. For fast, precise; and long reach arms, flexibility is
often the active constraint. Control, both feedback and feed forward, design strategies; and operational
strategies; should be considered to achieve a systematic solution.
References
[1] Book, W.J., Controlled motion in an elastic world, J. Dynamic Syst., Meas. Control, 50th Anniversary
Issue, pp. 252–261, March 1993.
[2] Norton, R.L., Machine Design, An Integrated Approach, Prentice Hall, New York, 1998.
[3] Young, W.C. and Budynas, R.G., Roark’s Formulas for Stress and Strain, McGraw-Hill, New York,
2002.
[4] Trahair, N.S., Flexural-Torsional Buckling of Structures, CRC Press, Boca Raton, FL, 1994.
[5] Sciavicco, L. and Siciliano, B., Modeling and Control of Robot Manipulators, 2nd ed., Springer-Verlag,
London, 2000.
[6] Craig, J.J., Introduction to Robotics: Mechanics and Control, Addison-Wesley, Reading, MA, 1986.
[7] Denavit, J. and Hartenberg, R.S., A kinematic notation for lower-pair mechanisms based on
matrices, ASME J. Applied Mechanics, vol. 22, pp. 215–221, 1955.
[8] Book, W., Analysis of massless elastic chains with servo controlled joints, ASME J. Dynamics Syst.,
Meas. Control, vol. 101, no. 3, pp. 187–192, Sept. 1979.
[9] Pestel, E.C. and Leckie, F.A., Matrix Methods in Elastomechanics, McGraw-Hill, New York, 1963.
[10] Book, W., Mark, M., and Kong, M., Distributed systems analysis package (DSAP) and its application
to modeling flexible manipulators, Final Report, Subcontract No. 551 to Charles Stark Draper
Laboratory, Contract NAS9-13809 to NASA, July 1979.
[11] Book, W.J., Modeling, design and control of flexible manipulator arms, Ph.D. thesis, Department
of Mechanical Engineering, Massachusetts Institute of Technology, April 1974.
[12] Meirovitch, L., Dynamics and Control of Structures, John Wiley & Sons, New York, 1990.
[13] Book, W., Recursive lagrangian dynamics of flexible manipulators, Int. J. Robotics Res., vol. 3, no. 3,
pp. 87–106, 1984.
[14] Girvin, D.L. and Book, W.J. Analysis of poles and zeros for tapered link designs, in Advanced Studies
of Flexible Robotic Manipulators, Chapter 8, World Scientific Publishing Company, NJ, 2003.
[15] Levine, W.S., Ed. The Control Handbook, CRC Press, Boca Raton, FL, 1996.
[16] Hastings, G.G. and Book, W.J., Reconstruction and robust reduced-order observation of flexible
variables, ASME Winter Annual Meeting, Anaheim, CA, December, 1986.
[17] Cannon, R.H. and Schmitz, E., Initial experiments on the end-point control of a flexible one-link
robot, Int. J. Robotics Res., vol. 3, no. 3, pp. 62–75, 1988.
[18] Truckenbrot, A., Modeling and control of flexible manipulator structures, Proc 4th CISM-IFToMM
Ro.Man.Sy. Zaborow, Poland, pp. 90–101, Sept. 8–12, 1981.
[19] Yuan, B.S., Huggins, J.D., and Book, W.J., Small motion experiments with a large flexible arm with
strain feedback, Proceedings of the 1989 American Control Conference, Pittsburgh, PA, pp. 2091–2095,
June 21–23, 1989.
[20] Wang, D. and Vidyasagar, M., Passive control of a stiff flexible link, Int. J. Robotics Res., vol. 11,
pp. 572–578, 1992.
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-43
[21] Obergfell, K. and Book, W.J., Control of flexible manipulators using vision and modal feedback,
Proceedings of the ICRAM, Istanbul, Turkey, 1995.
[22] Frame, A. and Book, W.J., Sliding mode control of a non-collocated flexible system, 2003 ASME
International Congress and Exposition, Washington D.C., Paper IMECE2003-41386, November
16–22, 2003.
[23] Oppenheim, A.V., Schaefer, R.W., and Buck, J.R., Discrete-Time Signal Processing, 2nd ed., Prentice
Hall, New York, 1998.
[24] Calvert, J.F. and Gimpel, D.J., Method and apparatus for control of system output in response to
system input, Patent 2,801,351, July 30, 1957.
[25] Smith, O.J.M., Feedback Control Systems, McGraw-Hill, New York, 1958.
[26] Singer, N. and Seering, W.P., Preshaping command inputs to reduce system vibration, ASME
J. Dynamic Syst., Meas. Control, vol. 112, no. 1, pp. 76–82, 1990.
[27] Magee, D.P. and Book, W.J., The application of input shaping to a system with varying parameters,
Proceedings of the 1992 Japan-U.S.A. Symposium on Flexible Automation, San Francisco, CA,
pp. 519–526, July 1992.
[28] Rhim, S. and Book, W.J., Noise effect on time-domain adaptive command shaping methods for
flexible manipulator control, IEEE Trans. Control Syst. Technol., vol. 9, no. 1 pp. 84–92, Jan. 2001.
[29] Singer, N., Singhose, W., and Seering, W., Comparison of filtering methods for reducing residual
vibrations, Eur. J. Control., vol. 5, pp. 208–218, 1999.
[30] U.S. Patent 6,078,844, Optimal arbitrary time-delay (OAT) filter and method to minimize unwanted
system dynamics, issued June 2000.
[31] Book, W.J., Magee, D.M., and Rhim, S., Time-delay command shaping filters: robust and/or
adaptive, J. Robotics Soc. Japan, vol. 17, no. 6, pp. 7–15, Sept. 1999.
[32] Rhim, S. and Book, W.J., Noise effect on time-domain adaptive command shaping methods for
flexible manipulator control, IEEE Trans. Control Syst. Technology, vol. 9, no. 1, pp. 84–92, Jan. 2001.
[33] Sadegh, N., Synthesis of a stable discrete-time repetitive controller for MIMO systems, ASME
J. Dynamic Syst. Meas. Control, vol. 117, no. 1, pp. 92–98, 1995.
[34] Rhim, S., Hu, A., Sadegh, N., and Book, W.J., Combining a multirate repetitive learning controller
with command shaping for improved flexible manipulator control, ASME J. Dynamic Syst., Meas.
Control, vol. 123, no. 3, pp. 385–390, Sept. 2001.
[35] Book, W.J., Sadegh, N., and Dickerson, S.L., Robotic assembly machine of low machine precision
and weight but high assembly precision and speed, U.S. Patent 5,946,449, issued August 31,
1999.
[36] Book, W.J. and Kwon, D.S., Contact control for advanced applications of light weight arms,
J. Intelligent and Robotic Systems, vol. 6, no. 1, pp. 121–137, 1992.
[37] Kwon, D.-S. and Book, W.J., A time-domain inverse dynamic tracking control of a single-link
flexible manipulator, J. Dynamic Syst., Meas. Control, vol. 116, pp. 193–200, June 1994.
[38] Register, A., Book, W.J., and Alford, C.O., Neural network control of nonminimum phase systems
based on a noncausal inverse, Proceedings of the ASME Dynamic Systems and Control Division, vol.
58, Atlanta, GA, pp 781–788, November 17–22, 1996.
[39] Bayo, E. and Paden B., On trajectory generation for flexible robots, J. Robotic Syst., vol. 4, no. 2,
pp. 229–235, 1987.
[40] Bayo,E. and Moulin,H., An efficient computation of the inverse dynamics of flexible manipulatorsin
the time domain, Proceedings of the IEEE Conference on Robotics and Automation, pp. 710–715, 1989.
[41] Alberts, T.E., Book, W.J., and Dickerson, S., Experiments in augmenting active control of a flexible
structure with passive damping, AIAA 24th Aerospace Sciences Meeting, Reno, NV, January 6–9, 1986.
[42] Alberts, T., Augmenting the control of a flexible manipulator with passive mechanical damping,
Ph.D. Thesis, School of Mechanical Engineering, Georgia Institute of Technology, September
1986.
[43] Book, W.J., Sangveraphunsiri, V., and Le, S., The bracing strategy for robot operation, Joint IFToMM-
CISM Symposium on the Theory of Robots and Manipulators (RoManSy), Udine, Italy, June 1984.
Copyright © 2005 by CRC Press LLC
24
-44 Robotics and Automation Handbook
[44] West, H. and Haruhiko, A., A method for the desing of hybrid position/force controllers for mani-
pulators constrained by contact with the environment, Proceedings of the IEEE International
Conference on Robotics and Automation, St. Louis, MO, 1985.
[45] Lew, J. and Book, W.J., Bracing micro/macro manipulator control, Proceedings of the 1994 IEEE
InternationalConferenceonRoboticsandAutomation,SanDiego,CA,pp.2362–2368,May8–13, 1994.
[46] Book, W.J. and Lee, S.H., Vibration control of a large flexible manipulator by a small robotic arm,
Proceedings of the American Control Conference, Pittsburgh, PA, pp. 1377–1380, 1989.
[47] Sharf, I., Active damping of a large flexible manipulator with a short-reach robot, Proceedings of
the American Control Conference, Seattle WA, pp. 3329–3333, 1995.
[48] Lew, J. and Moon, S.-M., A simple active damping control for compliant base manipulators,
IEEE/ASME Trans. Mechatronics, vol. 2, pp. 707–714, 1995.
[49] Book, W.J. and Loper, J.C., Inverse dynamics for commanding micromanipulator inertial forces to
damp macromanipulator vibration, 1999 IEEE, Robot Society of Japan International Conference on
Intelligent Robots and Systems, Kyongju, Korea, October 17–21, 1999.
[50] George, L. and Book, W.J., Inertial vibration damping control of a flexible base manipulator
IEEE/ASME Transactions on Mechatronics, pp. 268–271, 2003.
[51] Bailey, T. and Hubbard Jr., J.E., Distributed piezoelectric-polymer active vibration control of a
cantilever beam, J. Guidance, Control and Dynamics, vol. 8, no. 5, pp. 605–611, 1985.
Copyright © 2005 by CRC Press LLC