Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.


Flexible Robot Arms 24
-5
high feedback control gains to control the joint. In terms of material damping, a wide range of damping
values is observed and composites tend to have more damping than metals.
24.2.1.1.3 Idealized Structures and Loading
Exact evaluation of the stress in a robot component may require finite element analysis. For present
purposes it will be more valuable to compose the robot from idealized structures tractable to analytical
determination of stress and deflection. In particular we will use bars in compression, shafts in torsion,
and beams in bending. For static deflection the load and the elastic properties are needed. For dynamic
deflectionthe mass propertiesarealsoneeded. Geometry willcontributetoboth mass and elasticproperties.
24.2.1.1.3.1 Bars and Compression
A bar element is considered for axial loading. Almost pure compression or tension will result for a strut
or similar element pinned at each end. In this case the static deflection δ is also axial and predicted simply
and accurately by the assumption of plane strain. If the cross-sectional area A is constant over the length
L,deflection δ under applied axial force F
a
is
δ =
F
a
L
AE
= α
XF
F
a
(24.2)
If A is not constant, the deflection is obtained by integrating a differential deflection (axial strain) over
the length with the area A(x) variable. Normal stress is approximately
σ = F
a
/A
The dynamic behavior of a bar alone is rarely of concern with robots of conventional size if the bar
only experiences compression. This is because there are usually other components exhibiting more severe
deflection and because buckling constrains the ratio L/A to high values. The bar element can be used to
represent “tension only” components including cables and bands. In these cases buckling does not limit
L/A and the deflection can be substantial. Dynamic behavior incorporates mass as well. The mass of the
bar in tension is reduced as the cross-sectional area is reduced with the resulting effect that the natural
frequency is related to the speed of sound in the bar, which is invariant with the geometry and high relative
to other dynamic phenomena that impact robot performance. Thus, the bar plays the role of a spring for
most flexible robot analysis; its mass can be considered lumped, if considered at all, and does not warrant
consideration as a distributed parameter effect.
24.2.1.1.3.2 Shafts and Torsion
Pure torsion is a fair representation of drive shaft loading. Arm structural elements also may experience
torsion in conjunction with bending or compression, and to a reasonable approximation the effects can be
added or superimposed. The simple case we will build on is a circular cross section, either solid or hollow.
The torque T acting on a circular tube of length l with cross-section polar moment of inertia J produces
a rotation of one end with respect to the other of θ,where
θ =
Tl
JG
= α
θ T
T (24.3)
The pure shear τ resulting on the plane perpendicular to the axis of the torsion is approximately linear
with the radial distance r, giving the maximum at the outer radius R of
τ
max
=
TR
J
(24.4)
Copyright © 2005 by CRC Press LLC
24
-6 Robotics and Automation Handbook
r
q
d
x
w
(
x
)
X
Neutral axis
c
Y
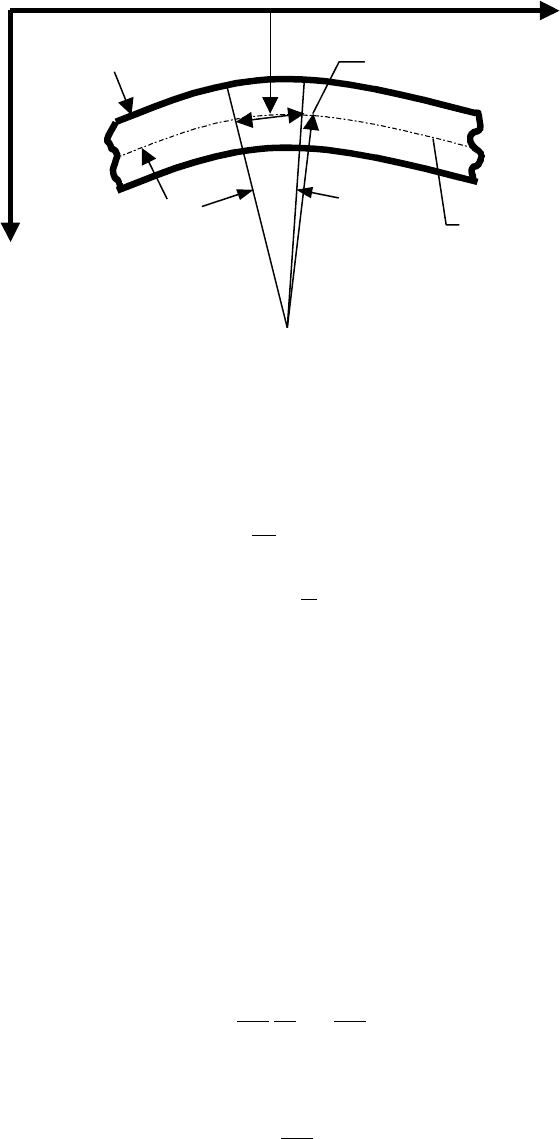
FIGURE 24.1 Geometry of bending deformation.
When the cross section is not circular an approximate analysis is often used that is accurate as long as the
cross section is not prone to extreme warping with torsion. In this analysis
θ =
Tl
KG
= α
θ T
T (24.5)
τ
max
=
T
Q
(24.6)
where K and Q are geometry dependent factors found in various handbooks and references such as
Norton [2].
24.2.1.1.3.3 Beams and Bending
The simple theory of beams is remarkably accurate for slender beams with cross sections that are not
extreme in their departure from a rectangle. If the beam has a deflection w such that at the position x,
the second derivative ∂
2
w/∂ x
2
is approximately equal to 1/r,wherer is the radius of curvature of the
neutral axis. As illustrated in Figure 24.1, the further assumption that planes perpendicular to the neutral
axis remain planes dictates the amount of elongation δ that takes place on the outer edge of the element
of length dx. With any finite curvature, an angle θ subtends the distance dx = r θ at a radius r from the
center of the local circular arc, that is, along the neutral axis. The strain along the neutral axis is zero by
definition. Moving to the outermost fiber of the beam, a distance c from the neutral axis, means the angle
θ subtends a greater distance of dx + δ = (c + r )θ. The combination of these relationships means the
strain at the outermost fiber is
ε = c
∂
2
w
∂x
2
dx
dx
= c
∂
2
w
∂x
2
(24.7)
By the simple beam theory the normal stress σ in the outermost fiber would be Eε or
σ = Ec
∂
2
w
∂x
2
dx (24.8)
and would vary linearly along y, the distance from the neutral axis. The moment M(x) developed at the
cross section by normal stress is found by integrating over the area of the cross section the stress times the
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-7
distance from the neutral axis times the differential area.
M(x) =
Area
σ (x, y)y
c
ydA = EI(x)
∂
2
w
∂x
2
(24.9)
where I (x) is the cross section’s area moment of inertia about the neutral axis at x.
I =
y max
y min
y
2
dA
(24.10)
The deformation, displacement, and rotation, at the end of a loaded beam is readily computed from the
moment equation above when knowing the loading and deflection constraints on the beam. Loading could
occur in any location and as a concentrated or distributed force (perpendicular to the neutral axis) or
moment (about an axis perpendicular to the plane of bending). Tabulations of these loading effects are
found in more specialized handbooks [3] and it is productive here to cite only the response of a beam with
one end constrained not to translate or rotate with the other end completely free. Apply to the free end of
this beam a force F
y
and a moment M
z
, and the resulting deflection w(l) and rotation θ(l) at the end will
be
w(x)|
x=l
=
l
3
3EI
F
y
+
l
2
2EI
M
z
= α
XF
F
y
+ α
XM
M
z
(24.11)
θ
z
(x)|
x=l
=
l
2
2EI
F
y
+
l
EI
M
z
= α
θF
F
y
+ α
θM
M
z
The second form of these two equations identifies coefficients referred to later in this section and tells you
how to compute them for the case of uniform beams. Tapered, shaped, or stepped beams have coefficients
that can be found from the deflection equation or in handbooks.
24.2.1.1.3.4 Combinations of Loading
In many situations it is acceptable to superimpose torsion, bending, and compression from the above
simple cases to calculate deformation and stress. The worst case stress will be where maximum axial
normal stress from bending is increased by the normal stress from axial forces. At this same point the shear
from torsion occurs and is maximum. The plane stress approximation is valid here and the von Mises
stress is found (assuming a circular cross section of outer radius R)tobe
σ
=
MR
I
+
F
a
A
2
+
TR
J
2
Extreme cases require a more complex analysis beyond the scope of this section. The boundary between
acceptable and unacceptable is fuzzy and case dependent, but if any component of loading is modified by
a significant fraction of the factor of safety, a more detailed analysis should be undertaken. For example,
if axial torsion T on a beam is realigned by 10
◦
, the bending moment on the beam is increased by about
0.18 T. An extremely slender beam could undergo 10
◦
of deformation without failure but the addition of
an additional bending moment of 0.18 T should be further considered. An exception to this proportional
effect is buckling behavior which is treated next.
24.2.1.1.4 Buckling
Bending becomes the most pronounced mode of stress and deflection in most beam type elements,
including arm links. The na
¨
ıve designer is, therefore, tempted to place the maximum material at the
maximum distance from the neutral axis. Because bending may take place about any axis perpendicular to
the neutral axis, circular crosssections are attractive as they also resist torsion about the beam axis well. Why
not carry this to the extreme of very thin walls located at extreme distances from the neutral axis so that the
arm cross section is similar to an aluminum beverage can? The limitation may come from one or more of
Copyright © 2005 by CRC Press LLC

24
-8 Robotics and Automation Handbook
several sources: arm bulk (limiting access), manufacturing difficulty, or the tendency of a thin wall cylinder
to buckle. Buckling is a structural instability in which the imperfections of construction and loading result
in a sudden drastic change in structure geometry. For the empty aluminum can, shell buckling alters the
geometry of the load bearing material, allowing localized stresses to rise and the geometry of the arm to be
destroyed. (Note that a pressurized drink can does not buckle so easily, so a thin, pressurized arm might
actually have merit.) Another form of buckling, column buckling, is typical of beams with small cross
sections. When such beams have a compressive axial load not perfectly aligned with a perfectly straight
neutral axis, the beam buckles in “column buckling” that was the subject of a classical analysis by Euler, an
analysis which still bears his name. Finally, “torsional buckling” arises from small cross sections subject to
imperfections in the straightness of the neutral axis or other loads which deflect the neutral axis a small
amount. The criticalloads predictedby the simple analyses beloware typicallytoo optimistic for arm design
and must be generously amplified in the case of robot arms, which are subjected to many unexpected and
complex loads. Nevertheless, it is important to realize there are constraints on arm geometry other than
flexibility that interplay with our main focus of flexible arms.
24.2.1.1.4.1 Column Buckling
Euler’s classical analysis of slender columns determines a bifurcation point at which an alternative shape of
the column is possible. The shape for simple uniform columns is a sinusoid, the periods of which depend
on the boundary conditions. More restrictive boundary conditions result in a shorter period and in turn
a higher critical load. The critical compressive load is
P
critical
=
π
2
EI
l
2
eff
=
π
2
EAk
2
l
2
eff
,
P
critical
A
=
π
2
Ek
2
l
2
eff
(24.12)
where
k =radius of gyration corresponding to the cross section shape
l
eff
=the effective column length, dependent on end-constraint conditions
=l for pinned-pinned ends
=2l for fixed (clamped)-free ends
=0.707l for fixed-pinned ends
=0.5l for fixed-fixed ends
While arm structures will not be sized on buckling alone, this analysis shows a sensitivity to the cross
section shape and the link length.
24.2.1.1.4.2 Shell Buckling
The thin drink can is prone to shell buckling at locations of compressive stress. Here the classical analysis
yields a critical stress
σ
critical
=
E
√
3(1 −ν
2
)
t
R
(24.13)
where
t = wall thickness
R =radius of cylindrical shell
ν =Poisson’s ratio for the material
E =Young’s modulus
Note that this is expressed in terms of a critical stress locally in the shell. Where that stress distributed over
a thin circular annulus with area 2πRt, the critical load becomes independent of R and dependent on t
2
. In
terms of stress, the ratio of thickness to radius is the key geometric feature that controls the susceptibility
to shell buckling for a more general geometry.
Copyright © 2005 by CRC Press LLC

Flexible Robot Arms 24
-9
24.2.1.1.4.3 Torsional Buckling
Torsional buckling is a third possibility for unstable behavior. If a slender shaft is simply supported (free
to rotate in flexure but not to translate), the critical longitudinal torsion on the shaft is found to be
T
critical
=
2EI
l
(24.14)
The nomenclature is the same as the preceding. The resulting shape upon buckling is a spiral with orthog-
onal deflections described by sinusoids. Shaft buckling would not be typically found in a free link but may
occur with the transmission of torque from motor to joint.
Other cases where torsion could be involved in link buckling are lateral-torsional buckling and flexural-
torsionalbuckling.These failures arebecause of a reductionof flexuralstiffnessresultingfroma longitudinal
rotation of the cross section [4]. A cross section with a large discrepancy between the area moments about
orthogonal directions is most susceptible to this type of failure.
24.2.2 Kinematics
Kinematics will be developed using 4 × 4 transformation matrices as frequently found in robotics. The
relation between positions and velocities is critical to developing dynamic equations and commanding
and controlling the joints to achieve desired end effector position. Two classes of relative motion will be
considered: discrete joints and distributed deflection.
24.2.2.1 Transformation Matrices
The commonly used 4 × 4 transformation matrices relate the position of a point as described in two
coordinate frames as detailed elsewhere in this book. For the immediate purposes, the nomenclature
relating the x, y, z values of two position vectors p
0
and p
1
is clarified by
p
0
= T
0
1
p
1
(24.15)
p
i
= [
x
i
y
i
z
i
1
]
T
Note that the superscripts on position vectors and scalars represent the frame of reference in which the
position is described.
The transformation matrix T
j
i
can represent a variety of static or dynamic features of the mechanism
to which the coordinate frames are attached. For rigid links the key features are the relative location and
orientation of joint axes due to construction or motion of the joints. The strategy for efficiently locating
and describing the coordinate frames is described elsewhere in this handbook or in Sciavicco and Siciliano
[5], a slight variation of Craig [6], and is based on the original scheme proposed by Denavit and Hartenberg
[7]. For flexible links, the features will include deflection under static or dynamic loads which we will focus
on in this section as employed by Book [8].
The core concept is the composition of the 4 ×4 transformation matrix as
T
j
i
=
R
j
i
x
j
i
y
j
i
z
j
i
000
1
(24.16)
R
j
i
isa3×3 rotation matrix describing rotations of the coordinates.
x
j
i
y
j
i
z
j
i
Copyright © 2005 by CRC Press LLC
24
-10 Robotics and Automation Handbook
is the translation of the frame origin from i to j in j coordinates. The subscripts of the matrices, vectors,
and scalars identify the point of interest.
24.2.2.2 Simple Kinematic Pairs
For the intentional joints of a robot we can use the tools described for rigid robots. Rotational joints
introduceterms in the rotation matrix R
j
i
that varyas the joint anglechanges. Translational joints introduce
terms in the translation vector of the matrix T. The orientation of the joint axes and their distance of
separation (in terms of a common normal) appear as constant terms. The reader is referred to other
chapters for the development of these terms.
24.2.2.3 Closed Kinematic Chains
The serial connection of linkages is readily described by a chain of transformation matrices multiplied
together. If the series reattaches to itself, a closed chain is formed. The chain can also branch into multiple
series of linkages, which is often the case when a closed chain is introduced so that a distant joint can
be actuated with a stationary actuator. The additional constraints that are created by these topologies
can be readily described by consistently following a chain to the point of rejoining itself, describing each
successive transformation with a transformation matrix, and ultimately relating the initial coordinate
frame to itself. This constraint system may enhance the behavior of a compliant manipulator arm. Details
of these procedures are not included here.
24.2.2.4 Kinematics of Deformation
When a transformation describes deflection, the terms of the T transformation matrix are dependent on
loading and on the geometry of the component which is under deformation. The deformation may be
large or small, but the most common and useful case is the small deformation case. With small rotations
the rotation matrix of direction cosines can be simplified by considering only first order terms composed
of the angles , , about X, Y, and Z, respectively, equivalent to the roll, pitch, and yaw rotations. Note
that for small angles the order of rotation is irrelevant. Hence
T
j
i
=
cos(x
i
x
j
) cos(y
i
x
j
) cos(z
i
x
j
) δx
j
i
cos(x
i
y
j
) cos(y
i
y
j
) cos(z
i
y
j
) δy
j
i
cos(x
i
z
j
) cos(y
i
z
j
) cos(z
i
z
j
) δz
j
i
0001
, T
j
i
∼
=
1 −δx
j
i
1 −δy
j
i
− 1 δz
j
i
0001
(24.17)
The deformation of a beam with bending and torsion, for example, would use the deformations for the
bending for δy, δz, , and and the equation for torsion for . δx would be zero unless compression of
the beam is considered, although this deflection is typically small.
When moving from one point on an arm to another, it is convenient to break the transformations into a
rigid transformation A
i
and an elastic transformation E
i
. The elastic transformation is small, as described
above, and dependent on loading. The combined effect is the multiplication of the two transforms. If the
typical slender linkage of an arm is envisioned, the elastic transformation due to bending, torsion, and
compression of relatively small amounts will be well described by
E
i
=
1 −α
θ Fi
F
i
Yi
− α
θ Mi
M
i
Zi
−α
θ Fi
F
i
Zi
+ α
θ Mi
M
i
Yi
α
Ci
F
i
Xi
α
θ Fi
F
i
Yi
+ α
θ Mi
M
i
Zi
1 −α
Ti
M
Xii
α
XFi
F
i
Yi
+ α
XMi
M
i
Zi
α
θ Fi
F
i
Zi
− α
θ Mi
M
i
Yi
α
Ti
M
i
Xi
1 α
XFi
F
i
Zi
+ α
XMi
M
i
Yi
00 01
(24.18)
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-11
where
α
Ci
=coefficient in compression, displacement/force
α
Ti
=coefficient in torsion, angle/moment
α
θFi
=coefficient in bending, angle/force
α
θMi
=coefficient in bending, angle/moment
α
XFi
=coefficient in bending, displacement/force
α
XMi
=coefficient in bending, displacement/moment
F
j
Xi
=force at the end of link i in the X direction of coordinate frame j
F
j
Yi
=force at the end of link i in the Y direction of coordinate frame j
F
j
Zi
=force at the end of link i in the Z direction of coordinate frame j
M
j
Xi
=moment at the end of link i in the X direction of coordinate frame j
M
j
Yi
=moment at the end of link i in the Y direction of coordinate frame j
M
j
Zi
=moment at the end of link i in the Z direction of coordinate frame j
Note that for readability we have assumed that the beam has a symmetrical cross section and the coefficient
of F
i
Yi
is the same as the coefficient of F
i
Zi
. In general these coefficients could be distinct. The numerical
values for the simple and useful case of a uniform beam are found in the discussion of bending, torsion,
and compression above in Equation (24.2), Equation (24.3), and Equation (24.11).
After deformation the position of the arm’s tip, located at the origin of the nth coordinate frame, is
found as
p
0
= [A
1
E
1
A
2
E
2
···A
i
E
i
A
i+1
E
i+1
···A
N
E
N
]
0
0
0
1
(24.19)
24.2.3 Dynamics
In moving from kinematics to dynamics, we consider the relationship between forces and motion, that
is, the change in position over time. For rigid robots this primarily involves actuator forces and torques,
inertia acceleration or kinetic energy storage, frictional dissipation, and possibly gravity or other body
forces. For flexible robots, the storage of potential energy in elastic deformation becomes important.
One of the early decisions on modeling the dynamics is how the kinetic and elastic potential energy
storage are to be spatially distributed. If predominantly separated in lumped components, the separate
modeling of springs and inertias will lead directly to ordinary differential equations. If these storage
modes are combined throughout the links, the lumped model is inefficient and unsystematic, and the
partial differential equations or at least the distributed nature of the bodies should be considered.
24.2.3.1 Lumped Models
Lumped arm models will consider the arm to be made up of inertias and springs. The focus in this section
will be the linear behavior resulting from small motions consistent with the modeling of a structure
as an elastic member. The reader may be concerned with the choice between lumped and distributed
models. Lumped models are approximations that offer convenience, a more intuitive understanding and
simpler solution procedures at the cost of accuracy and/or computational efficiency. Components that
predominantly store potential energy as a spring with minimum storage of kinetic energy (due to low
mass or small velocities) are candidates for representation as a lumped spring. In contrast, components
storing kinetic energy with minimum compliance are candidates for lumped inertias. Because structural
materials intrinsically have both properties, the lumped approximation is never perfect.
Copyright © 2005 by CRC Press LLC
24
-12 Robotics and Automation Handbook
Dissipation effects also warrant modeling. It is typically possible to include friction or viscous damping
into either the actuator forcing or to incorporate these losses into the equations for either lumped or
distributed models using the variables that are dictated by the mass and compliance representations.
24.2.3.1.1 Lumped Inertia
The definition of inertia could be approached from the distribution of mass and consequently a triple
integral over the volume of the body. For our purposes it will be more direct to define the inertia as the
matrix coefficient that relates accelerations (translational and rotational) to forces and moments:
J
¨
p
¨
=
F
M
(24.20)
While not specific in the equation above, the usual reference point for writing these equations will be the
center of mass of the body and the motion will be relative to an inertial reference frame.
24.2.3.1.2 Lumped Springs
Springs are often visualized as a machine element intended to deform under load. More generally, any
real machine element will deform to a limited extent, and we should be much more inclusive in our
consideration of springs. For robots and other mechanisms there are machine elements that consistently
behave as unintentional springs: Shafts for transmission of power by rotation, bearings and bearing
housings, gear and other speed reducers, belts for transmission of power, and couplings. These and other
elements may be constrained in their cross section and hence are allowed to deform because the space
constraints do not permit an adequate stiffness.
It is tempting to enlarge the components that are not constrained in cross section. This mistake is often
observed in robot arm design and in machine design in general. In arms, an external beam member will
be increased in size and inertia making it very nearly rigid, while aggravating the lack of rigidity of the
constrained components that move it: shafts, bearings, joint structures, etc., as well as the links and drive
motors inboard of the oversized link. Structural natural frequency is a good indicator of the flexibility
problem that ensues, and that natural frequency is predicted by the square root of the ratio of spring
constant over inertia. Increasing the cross section of an outboard component will continue to increase
inertia after its value in increasing stiffness of the chain of components has diminished. Because these
elements are more difficult to analyze, the tendency is to over design them to approximate rigidity. For
this reason, considerable attention will be given to analysis of the compliance and distributed flexibility of
the beam type elements of an arm’s construction.
24.2.3.1.3 Stiffness of a Series of Links
To evaluate the compliance of a series of N links to forces on the end of the chain, the partial derivative of
the position of the end can be taken, yielding, in the example case of F
XN
:
∂p
0
∂ F
0
XN
=
N
i=1
A
1
A
2
···A
i
∂ E
i
∂ F
0
XN
A
i+1
···A
N
0
0
0
1
(24.21)
Similar expressions result for all six forces and moments on the arm’s end.
To complete this calculation numerically, note that
∂ E
i
∂ F
0
XN
=
∂ E
i
∂ F
i
Xi
∂ F
i
Xi
∂ F
0
XN
(24.22)
Copyright © 2005 by CRC Press LLC
Flexible Robot Arms 24
-13
which can be obtained from the vector form
∂
∂ F
0
N
∂
∂ M
0
N
F
i
i
T
M
i
i
T
=
R
i
0
r
i
i
× R
i
0
0 R
i
0
(24.23)
and from substitution into the equation for E
i
the value F
i
Xi
=1 and the value zero for all other forces
and moments. That is,
∂ E
i
∂ F
i
Xi
=
1 −α
θ Fi
F
i
Yi
− α
θ Mi
M
i
Zi
−α
θ Fi
F
i
Zi
+ α
θ Mi
M
i
Yi
α
Ci
F
i
Xi
α
θ Fi
F
i
Yi
+ α
θ Mi
M
i
Zi
1 −α
Ti
M
i
Xii
α
XFi
F
i
Yi
+ α
XMi
M
i
Zi
α
θ Fi
F
i
Zi
− α
θ Mi
M
i
Yi
α
Ti
M
i
Xi
1 α
XFi
F
i
Zi
+ α
XMi
M
i
Yi
00 01
(24.24)
where
F
i
Xi
= 1, F
i
Yi
= F
i
Zi
= 0, M
i
Xi
= M
i
Yi
= M
i
Zi
= 0
The vector and scalar forms of forces F , moments M, positions X, and angles are distinguished by
having only the single subscript indicating the link index. The expressions for all other forces and moments
are found equivalently and the lot assembled into a compliance matrix C, the inverse of the spring constant
matrix K
S
= C
−1
according to
C =
∂
∂ F
0
N
∂
∂ M
0
N
X
0
N
T
0
N
T
(24.25)
Knowledge of the spring constant and the rigid body inertias is all that is needed to specify the equations of
motions of the lumped parameter flexible link system if the joints are fixed. As will be seen in the following
section, the approach above is also useful if the joints are controlled to move the arm.
24.2.3.2 Dynamics of Lumped Masses and Massless Elastic Links
with Servo Controlled Joints
For some applications of lightweight manipulators, particularly in space where a gravity load need not be
supported, very light links can be used to position large inertias. The Space Shuttle RMS and the Space
Station Arm are excellent examples of this situation. In these cases, the joints function to deform the links
(springs) which then apply forces and moments to the essentially rigid masses comprising the vehicle and
the payload. The following approach applies directly to that case and can be modified to apply to other
cases. For a more complete development see Book [8].
The kinematic relationships will be analyzed using transformation matrices consisting of
R
j
i
= rotation matrix from system i to system j
r
j
i
= distance vector from the origin of system i to the end of the chain (origin of system N)interms
of coordinates j
We will consider small translations and rotations of the two masses on either end, which will be described
by the vectors
Z
0
=
d
T
0
φ
T
0
T
, Z
n
=
d
T
n
φ
T
n
T
(24.26)
where d
0
, d
n
are the position vectors from the origin of −1 (inertial frame) to the origins of 0 and n,
respectively, and
0
,
n
are the vectors of small rotations of mass 0 and n, respectively, from an initial
undeformed orientation.
Copyright © 2005 by CRC Press LLC
24
-14 Robotics and Automation Handbook
In the case of joint angle rotations, the rotation will be permitted only about either the Z or the X axes.
The angles of rotations are:
γ
i
= angle from positive Z
i−1
to positive Z
i
, measured counterclockwise about positive X
i
β
i
= angle from positive X
i−1
to positive X
i
measured counterclockwise about positive X
i
Joint position and rate control will be employed so that
Torque by actuators = K
c
(θ
dJ
− θ
J
) + D
c
(
˙
θ
dJ
−
˙
θ
J
)
where
θ
J
=vector of m controlled joint angles measured from an arbitrary reference point
θ
dJ
=vector of m desired joint angles
˙
θ
J
=vector of m controlled joint angular velocities
˙
θ
dJ
=vector of m desired joint angular velocities
K
c
=m × m matrix of position control gains
D
c
=m × m matrix of velocity control gains
The displacement of the end mass gives forces on that mass of
Forces
Moments
on mass at n
n displaced
=−K
S
(Z
n
− Z
ns
) (24.27)
while that same force gives torques on the actuators of
Torques on actuators
with n displaced
= HK
S
(Z
n
− Z
ns
) (24.28)
We will construct the matrix H element by element depending on the actuated joint, first defining the
cross product term
XCR
h
= r
hh
× R
0h
And the element notation H(i, j) = element in ith row, jth column of H,1≤ i ≤ m,1≤ j ≤ 6.
H(i, j ) =XCR
h
(k, j), 1 ≤ j ≤ 3, 1 ≤ i ≤ m
H(i, j ) = R
0h
(k, j − 3), 3 ≤ j ≤ 6, 1 ≤ i ≤ m
where
k =1ifγ
h
is the ith element of θ
J
k =3ifβ
h
is the ith element of θ
J
m =total number of controlled joints
The following transformation will also be needed since rotations will also cause translations at a distant
point.
IXC
T
0 I
(Z
0
− Z
0e
) = T
T
(Z
0
− Z
0e
) (24.29)
XC =
0 −r
Z0n
r
Y0n
r
Z0n
0 −r
X0n
−r
Y0n
r
X0n
0
(24.30)
Copyright © 2005 by CRC Press LLC