Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

23
-18 Robotics and Automation Handbook
start
yes
no
no
yes
stop
interaction
calculator
collision
detector
simulation
over?
forward dynamics
solver
dynamic
model
geometric
model
interaction
model
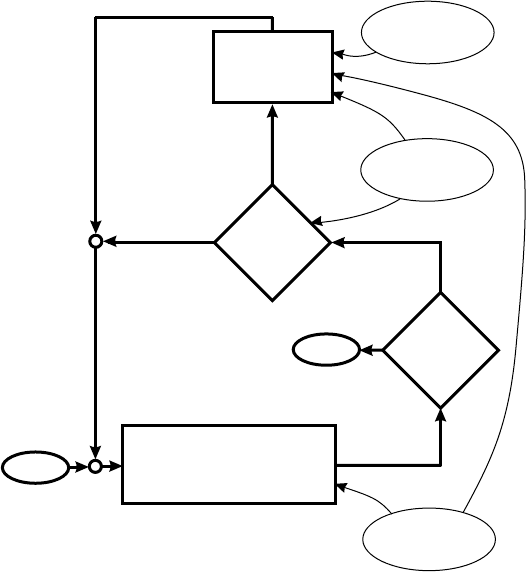
FIGURE 23.7 Flowchart showing interconnection of the dynamics solver, collision detector, and interaction
calculator.
23.5.1 Collision Detector
To calculate a global solution in a computationally efficient manner, it is very common to handle the
collision detection problem in two parts: a broad phase, which involves a coarse global search for potentially
interacting surfaces, and a narrow phase, which is usually based on a fast local optimization scheme on
convex surface patches. To handle nonconvex shapes, preprocessing is performed to decompose them into
sets of convex surface patches. However, there exist shapes for which such a decomposition is not possible,
for example, a torus.
23.5.1.1 Broad Phase
Thebroadphase iscomposedof two major steps.First, a global proximitytestis performed using hierarchies
of bounding volumes or spatial decompositions for each surface patch. Among the most widely used
bounding volumes and space decompositions are the octrees [36], k-d trees [37], BSP-trees [38], axis-
aligned bounding boxes (AABBs) [39], and oriented bounding boxes (OBBs) [40].
During the global proximity test, the distances between bounding boxes for each pair of surface patches
drawn from all pairs of bodies are compared with a threshold distance and surfaces that are too distant to
be contacting are pruned away. Remaining surfaces are set to be active.
In the second step of the broad phase, approximate interaction points on active surfaces are calculated.
For example, if the geometric models are represented by non-uniform rational B-splines (NURBS), control
polygons of the active surface models can be used to calculate a first order approximation to the closest
points on these surfaces. Specifically, bounding box centroids of each interacting surface patch can be
projected onto the polygonal control mesh of the other patch. Using the strong convex hull property of
Copyright © 2005 by CRC Press LLC
Haptic Interface to Virtual Environments 23
-19
NURBS surfaces, one can determine the candidate span and interpolate the surface parameters from the
node values. These approximate projections serve as good initialization points for the narrow phase of the
collision detector.
23.5.1.2 Narrow Phase
After initialization with the approximations calculated in the broad phase, the narrow phase employs an
algorithm to iteratively update the minimum distance between each active pair of surfaces.
Previous work in narrow phase collision detection has concentrated on computing the minimum dis-
tance between convex polyhedral objects. State-of-the-art algorithms for computing the distance between
convex polyhedraare based on the algorithmby Gilbert, Johnson, and Keerthi (GJK) [41, 42], the algorithm
of Lin and Canny [43], and the algorithm by Mirtich [44].
The GJK algorithm makes use of Minkowski difference and (simplex-based) convex optimization tech-
niques to calculate the minimum distance. The iterative algorithm generates a sequence of ever im-
proving intermediate steps within the polyhedra to converge to the true solution. The algorithm of Lin
and Canny makes use of Voronoi regions and temporal/spatial coherence between successive queries to
navigate along the boundaries of the polyhedra in the direction of decreasing distance. The V-Clip al-
gorithm by Mirtich is reminiscent of the Lin and Canny closest features algorithm but makes several
improvements.
Less literature exists on direct collision detection for nonpolygonal models. Gilbert et al. extended their
algorithm to general convex objects in [45]. In a related paper [46], Turnbull and Cameron modify the
widely used GJK algorithm to handle convex shapes defined using NURBS. Similarly, in [47, 48] Lin and
Manocha present an algorithm for curved models composed of spline or algebraic surfaces by extending
their earlier algorithm for polyhedra.
Finally, a new class of algorithms, namely, minimum distance tracking algorithms for parametric sur-
faces, is presented in [49–52]. These algorithms are designed to maintain the minimum distance between
two parametric surfaces by integrating the differential kinematics of the surfaces as the surfaces undergo
rigid body motion.
23.5.2 Interaction Calculator
The interaction calculator, triggered into action by the collision detector, computes inputs (forces and
moments) and new initial conditions (in the case of impulse response) for the forward dynamics solver.
In so doing, it realizes interaction between bodies, whether such interaction occurs during a finite or an
infinitesimal period of time. As indicated in Figure 23.7, the interaction calculator calls upon an interaction
model and the geometric model to compute its response. If impulse response is also used, the interaction
calculator additionally calls upon portions of the dynamic model.
The most widely used interaction model in both haptic rendering and multibody dynamics is called the
penalty method: it assumes compliant contact characterized by a spring-damper pair. The force response is
then proportional to the amount and rate of interpenetration. The interaction calculator need only query
the geometric model using these surface parameters to determine the interpenetration vector. To compute
a replacement (a resultant applied at the center of mass and a couple applied to the body) for the set of
all contact forces and moments acting on a body for use as input to the dynamic model, the interaction
calculator queries the geometric model using the surface parameters and then carries out the appropriate
dot and cross products and vector sums. Using replacements for the set of interaction forces allows the
dynamic model to be fully divorced from the geometric model.
The penalty contact model allows interpenetration between the objects within the virtual environment,
which in a certain sense is nonphysical. However, the penalty method also eliminates the need for impulse
response models, since all interactions take finite time. Important alternatives to the penalty method in-
clude the direct computation of constraint forces using the solution of a linear complementarity problem
espoused by Baraff [53, 54] and widely adopted within the computer graphics community. The formula-
tion by Mirtich and Canny [55] uses only impulses to account for interaction, with many tiny repeated
Copyright © 2005 by CRC Press LLC
23
-20 Robotics and Automation Handbook
impulses for the case of sustained contact. Note that computation of impulses requires that the interaction
calculator query the dynamic model with the current extremal point parameters and system configuration
to determine the effective mass and inertia at each contact point.
Itis important tocarefullydistinguishbetweenthe role of thepenalty methodand the virtualcoupler. The
virtual coupler serves as a filter between the virtual environment and haptic device whose design mitigates
instability and depends on the energetic properties of the closed-loop system components. The penalty
method, on the other hand, though it may also be modelled by a spring-damper coupler, is an empirical
law chosen to produce reasonable behavior in multibody system simulation. Parameter values used in the
penalty method also have implications for stability, though in this case it is not haptic rendering system
but rather numerical stability that is at issue. Differential equation stiffness is, of course, also determined
by penalty method parameter values.
Associated with the penalty method is another subtle issue, that of requiring a unique solution to the
maximum distance problem when the interpenetrated portions of two bodies are not both strictly convex
or there exists a medial axis [56] within the intersection. This is the issue which the god-object or proxy
methods address [57, 59].
23.5.3 Forward Dynamics Solver
The final component comprising the haptics-equipped simulator is a differential equation solver that
advances the solution of the equations of motion in real time. The equations of motion are a set of
differential equations constructed by applying a principal of mechanics to kinematic, inertial, and/or
energy expressions derived from a description of the virtual environment in terms of configuration and
motionvariables(generalizedcoordinatesand their derivatives)and mass distribution properties. Typically
the virtual environment is described as a set of rigid bodies and multibody systems interconnected by
springs, dampers, and joints. In such case the equations of motion become ordinary differential equations
(ODEs), expressing time-derivatives of generalized coordinates as functions of contact or distance forces
and moments acting between bodies of the virtual environment. In Figure 23.4, representative bodies A,
B, and P comprise the virtual environment, while the forces and moments in the springs and dampers that
make up the virtual coupler between bodies P and E are inputs or arguments to the equations of motion.
The configuration (expressed by the generalized coordinates) and motion (expressed by the generalized
coordinate derivatives) of bodies A, B, and P are then computed by solving the equations of motion (see
also Figure 23.5). One may also say that the state (configuration and motion) of the virtual environment
is advanced in time by the ODE solver.
Meanwhile, the collision detector runs in parallel with the solution of the equations of motion, monitor-
ing the motion of bodies A, B, and P and occasionally triggering the interaction calculator. The interaction
calculator runs between time-steps and passes its results (impulses and forces) to the equations of motion
for continued simulation.
Quite often the virtual environment is modeled as a constrained multibody system, and expressed as
a set of differential equations accompanied by algebraic constraint equations. For example, constraint
appending using the method of Lagrange Multipliers produces differential-algebraic equations (DAEs).
In such case, a DAE solver is needed for simulation. Note that DAE solvers are not generally engineered
for use in real-time or with constant step-size and usually require stabilization. Alternatively, constrained
multibody systems may be formulated as ODEs and then simulated using standard ODE solvers using
constraint-embedding techniques. Constraint embedding can take place symbolically (usually undertaken
prior to simulation time) or numerically (possibly undertaken during simulation and in response to run-
time events).
Alternatives to the forward dynamics/virtual coupler formulation described above have been developed
for tying together the dynamic model and the haptic interface. For example, the configuration and motion
of the haptic device image (body E in Figure 23.5) might be driven by sensors on the haptic interface. A
constraint equation can then be used to impose that configuration and motion on the dynamic model of
the virtual environment.
Copyright © 2005 by CRC Press LLC

Haptic Interface to Virtual Environments 23
-21
23.6 Concluding Remarks
In this chapter, we have presented a framework for rendering virtual objects for the sense of touch. Using
haptic interface technology, virtual objects can not only be seen, but felt and manipulated. The haptic
interface is a robotic device that intervenes between a human user and a simulation engine, to create,
under control of the simulation engine, an appropriate mechanical response to the mechanical excitation
imposed by the human user. ‘Appropriate’ here is judged according to the closeness of the haptic interface
mechanical response to that of the target virtual environment. If the excitation from the user is considered
to be motion, the response is force and vice-versa. Fundamentally, the haptic interface is a multi-input
multi-output system. From a control engineering perspective, the haptic interface is a plant simultaneously
actuated and sensed by two controllers: the human user and the simulation engine. Thus the behavior
of the haptic interface is subject to the influence of the human user, the virtual environment simulator,
and finally its own mechanics. As such, its ultimate performance requires careful consideration of the
capabilities and requirements of all three entities.
While robotics technology strives continually to instill intelligence into robots so that they may act
autonomously, haptic interface technology strives to strike all intelligence out of the haptic interface—to
get out of the way of the human user. After all, the human user is interested not in interacting with the
haptic interface, but with the virtual environment. The user wants to retain all intelligence and authority.
As it turns out, to get out of the way presents some of the most challenging design and analysis problems
yet posed in the greater field of robotics.
References
[1] Goertz, R.C., Fundamentals of general-purpose remote manipulators, Nucleonics, vol. 10, no. 11,
pp. 36–45, 1952.
[2] Baarspul, M., Review of flight simulation techniques, Progress in Aerospace Sciences, vol. 27, no. 1,
pp. 1–20, 1990.
[3] Collinson,R.,Fly-by-wireflight control,Computingand ControlEngineeringJournal,vol.10,pp.141–
152, August 1999.
[4] Burdea, G.C., Force and Touch Feedback for Virtual Reality, Wiley Interscience, New York, NY, 1996.
[5] Marayong, P., Li, M., Okamura, A.M., and Hager, G.D. Spatial motion constraints: theory and
demonstrations for robotguidanceusingvirtualfixtures,in IEEE InternationalConferenceon Robotics
and Automation, pp. 1954–1959, 2003.
[6] Griffiths, P. and Gillespie, R.B., Shared control between human and machine: Haptic display of
automation during manual control of vehicle heading, in 12th International Symposium of Haptic
Interfaces for Virtual Environment and Teleoperator Systems (HAPTICS’04), Chicago,IL, pp. 358–366,
March 27–28, 2004.
[7] Bettini, A., Marayong, P., Lang, S., Okamura, A.M., and Hager, G. Vision assisted control for ma-
nipulation using virtual fixtures, IEEE Transactions on Robotics and Automation, in press.
[8] Reinkensmeyer, D., Standard Handbook of Biomedical Engineering & Design, ch. Rehabilitators,
pp. 35.1–35.17, McGraw-Hill, New York, 2003.
[9] Gillespie, R.B., Hoffman, M., and Freudenberg, J., Haptic interface for hands-on instruction in
system dynamics and embedded control, in IEEE Virtual Reality Conference, (Los Angeles, CA), pp.
410–415, March 22–23, 2003.
[10] Okamura, A.M., Richard, C., and Cutkosky, M.R., Feeling is believing:using a force-feedbackjoystick
to teach dynamic systems, ASEE J. Engineering Education, vol. 92, no. 3, pp. 345–349, 2002.
[11] Lawrence, D.A., Stability and transparency in bilateral teleoperation, IEEE Transactions on Robotics
& Automation, vol. 9, pp. 624–637, October 1993.
[12] Seguna, C.M., The design, construction and testing of a dexterous robotic end effector, Proc. IEEE
R8 Eurocon 2001 Int. Conf. Trends Commun., vol. 1, pp. XXXVI–XLI, July 2001.
[13] Adams, R.J., Klowden, D., and Hannaford, B., Stable haptic interaction using the excalibur force dis-
play, in Proceedings of International Conference on Robotics and Automation, vol. 1, pp. 770–775, 2000.
Copyright © 2005 by CRC Press LLC
23
-22 Robotics and Automation Handbook
[14] Miller, B.E., Colgate, J.E., and Freeman, R.A., Guaranteed stability of haptic systems with nonlinear
virtual environments, IEEE Transactions on Robotics and Automation, vol. 16, no. 6, pp. 712–719,
2000.
[15] Klatzky, R.L., Lederman, S.J., and Reed, C., Haptic integration of object properties: texture, hard-
ness, and planar contour, Journal of Experimental Psychology-Human Perception and Performance,
vol. 15, no. 1, pp. 45–57, 1989.
[16] Klatzky, R.L., Lederman, S.J., Pellegrino, J., Doherty, S., and McCloskey, B., Procedures for haptic
object exploration vs. manipulation, Vision and Action: The Control of Grasping, pp. 110–127, 1990.
[17] Lederman, S.J. and Klatzky, R.L., An introduction to human haptic exploration and recognition of
objects for neuroscience and AI, Neuroscience:FromNeuralNetworkstoArtificial Intelligence, vol. 4,
pp. 171–188, 1993.
[18] Katz, D., The World of Touch, 1925, edited and translated by Lester E. Krueger, Lawrence Erlbaum,
Hillsdale, NJ, 1989.
[19] Gibson, J.J., The Senses Considered as Perceptual Systems, Boston: Houghton Mifflin, vol. 2,
pp. 1453–1458, 1966.
[20] Schaal, S. and Atkeson, C.G., Robot juggling: an implementation of memory-based learning,
Control Systems Magazine, vol. 14, no. 1, pp. 57–71, 1994.
[21] Schaal, S., Sternad, D., and Atkeson, C.G., One-handed juggling: a dynamical approach to a
rhythmic movement task, Journal of Motor Behavior, vol. 28, no. 2, pp. 165–183, 1996.
[22] Klatzky, R.L. and Lederman, S.J., Identifying objects from a haptic glance, Perception and
Psychophysics, vol. 57, no. 8, pp. 1111–1123, 1995.
[23] Lederman, S.J. and Klatzky, R.L., Extracting object properties by haptic exploration, Acta
Psychologica, vol. 84, pp. 29–40, 1993.
[24] Klatzky, J.M., Loomis, R.L., Lederman, S.J., Wake, H., and Fujita, N., Haptic identification of
objects and their depictions, Perception and Psychophysics, vol. 54, no. 2, pp. 170–178, 1993.
[25] Aristotle, De Anima, translated by Hugh Lawson-Tancred, Penguin Books, New York, NY, 1986.
[26] Katz, D., The World of Touch, 1925, edited and translated by Lester E. Krueger, Lawrence Erlbaum,
Hillsdale, NJ, 1989.
[27] Heller, M.A. and Schiff, W., eds., The Psychology of Touch, Lawrence Erlbaum, Hillsdale, NJ, 1991.
[28] Ellis, R.E., Sarkar, N., and Jenkins, M.A., Numerical methods for the force reflection of contact,
Journal of Dynamic Systems, Measurement, and Control, vol. 119, pp. 768–774, Decemeber
1997.
[29] Gillespie, R.B. and Cutkosky, M.R., Stable user-specific haptic rendering of the virtual wall, in
Proceedings of the ASME Dynamic Systems and Control Division, vol. 58, pp. 397–406, November
1996.
[30] Hajian, A. and Howe, R.D., Identification of the mechanical impedance at the human finger tip,
Journal of Biomechanical Engineering, Transactions of the ASME, vol. 119, pp. 109–114, February
1997.
[31] Colgate, J.E. and Schenkel, G.G., Passivity of a class of sampled-data systems: application to haptic
interfaces, Journal of Robotic Systems, vol. 14, pp. 37–47, January 1997.
[32] Colgate, J.E., Coordinate transformations and logical operations for minimizing conservativeness
in coupled stability criteria, Journal of Dynamic Systems, Measurement, and Control, vol. 116,
pp. 643–649, December 1994.
[33] Colgate, J.E., Stanley, M.C., and Brown, J.M., Issues in the haptic display of tool use, in Proceedings
of IEEE/RSJ International Conference on Intelligent Robots and Control, pp. 140–145, 1995.
[34] Miller, B.E., Colgate, J.E., and Freeman, R.A., Guaranteed stability of haptic systems with nonlinear
virtual environments, IEEE Transactions on Robotics & Automation, vol. 16, pp. 712–719, December
2000.
[35] Hannaford, B. and Ryu, J.-H., Time-domain passivity control of haptic interfaces, IEEE Transactions
on Robotics & Automation, vol. 18, pp. 1–10, February 2002.
[36] Moore, M. and Wilhelms, J. Collision detection and response for computer animation, Computer
Graphics SIGGRAPH 1988, vol. 22, pp. 289–298, 1988.
Copyright © 2005 by CRC Press LLC
Haptic Interface to Virtual Environments 23
-23
[37] Held, M., Klosowski, J.T., and Mitchell, J.S.B., Evaluation of collision detection methods for virtual
reality fly-throughs, Proceedings of Seventh Canadian Conference Computer Geometry, pp. 205–210,
1995.
[38] Naylor, B., Amatodes, J.A., and Thibault, W., Merging BSP trees yields polyhedral set operations,
Computer Graphics SIGGRAPH 1990, vol. 24, pp. 115–124, 1990.
[39] Beckmann, N., Kriegel, H.P., Schneider, R., and Seeger, B., The r
∗
-tree: an efficient and robust
access method for points and rectangles, Proceedings of ACM SIGMOD International Conference on
Management of Data, pp. 322–331, 1990.
[40] Barequet, G., Chazelle, B., Guibas, L.J., Mitchell, J.S.B., and Tal, A., Boxtree: a hierarchical
representation for surfaces in 3D, EuroGraphics’ 96, vol. 15, no. 3, pp. 387–484, 1996.
[41] Gilbert, E.G., Johnson, D.W., and Keerthi, S.S., Fast procedure for computing the distance between
convex objects in three-dimensional space, IEEE Journal of Robotics and Automation, vol. 4, no. 2,
pp. 193–203, 1988.
[42] Ong, C.J. and Gilbert, E.G., Fast versions of the Gilbert-Johnson-Keerthi distance algorithm:
Additional results and comparisons, IEEE Transactions on Robotics and Automation, vol. 17, no. 4,
pp. 531–539, 2001.
[43] Lin, M.C. and Canny, J.F. A fast algorithm for incremental distance calculation, in IEEE International
Conference on Robotics and Automation, vol. 2, pp. 1008–1014, 1991.
[44] Mirtich, B., V-Clip: fast and robust polyhedral collision detection, ACM Transactions on Graphics,
vol. 17, no. 3, pp. 177–208, 1998.
[45] Gilbert, E.G. and Foo, C.P., Computing the distance between general convex objects in three-
dimensional space, IEEE Transactions on Robotics and Automation, vol. 6, no. 1, pp. 53–61, 1990.
[46] Turnbull, C. and Cameron, S., Computing distances between NURBS-defined convex objects, in
Proceedings IEEE International Conference on Robotics and Automation, vol. 4, pp. 3685–3690, 1998.
[47] Lin, M.C. and Manocha, D., Interference detection between curved objects for computer animation,
in Models and Techniques in Computer Animation, Thalmann, N.M. and Thalmann, D. (eds.),
Springer-Verlag, Tokyo, pp. 43–57, 1993.
[48] Lin, M.C. and Manocha, D., Fast interference detection between geometric models, Visual
Computer, vol. 11, no. 10, pp. 542–561, 1995.
[49] Thompson II, T.V., Johnson, D.E., and Cohen, E., Direct haptic rendering of sculptured models, in
Proceedings Symposium on Interactive 3D Graphics, pp. 167–176, 1997.
[50] Johnson, D.E. and Cohen, E. An improved method for haptic tracing of a sculptured surface,
in Proceedings of ASME International Mechanical Engineering Congress and Exposition, vol. 64,
pp. 243–248, 1998.
[51] Nelson, D.D., Johnson, D.E., and Cohen, E., Haptic rendering of surface-to-surface sculpted model
interaction, in Proceedings ASME Dynamic Systems and Control Division, vol. 67, pp. 101–108, 1999.
[52] Patoglu, V. and Gillespie, R.B., Extremal distance maintenance for parametric curves and surfaces,
Internationl Conference on Robotics & Automation 2002, pp. 2817–2823, 2002.
[53] Baraff, D., Analytical methods for dynamic simulation of nonpenetrating rigid bodies, Computer
Graphics, vol. 23, no. 3, pp. 223–232, 1989.
[54] Baraff, D., Fast contact force computation for nonpenetrating rigid bodies, in Computer Graphics
Proceedings. Annual Conference Series SIGGRAPH 94, vol. 1, pp. 23–34, 1994.
[55] Mirtich, B. and Canny, J., Impulse-based simulation of rigid bodies, in Proceedings of the Symposium
on Interactive 3D Graphics, pp. 181–188, 1995.
[56] Ramamurthy, R. and Farouki, R.T., Voronoi diagram and medial axis algorithm for planar domains
with curved boundaries-II. Detailed algorithm description, Journal of Computational and Applied
Mathematics, vol. 102, pp. 253–277, 1999.
[57] Zilles, C. and Salisbury, J., A constraint based god-object method for haptic display, in IEE/RSJ
International Conference on Intelligent Robots and Systems, Human Robot Interaction, and Cooperative
Robots, vol. 3, pp. 146–151, 1995.
[58] Ruspini, D.C., Kolarov, K., and Khatib, O., The haptic display of complex graphical environments,
in Computer Graphics Proceedings. Annual Conference Series, vol. 1, pp. 345–352, 1997.
Copyright © 2005 by CRC Press LLC

24
Flexible Robot Arms
Wayne J. Book
Georgia Institute of Technology
24.1 Introduction
Motivation Based on Higher Performance
•
Nature of
Impacted Systems
•
Description of Contents
24.2 Modeling
Statics
•
Kinematics
•
Dynamics
•
Distributed Models
•
Frequency Domain Solutions
•
Discretization of the Spatial
Domain
•
Simulation Form of the Equations
•
Inverse
Dynamics Form of the Equations
•
System Characteristic
Behavior
•
Reduction of Computational Complexity
24.3 Control
Independent Proportional Plus Derivative Joint Control
•
Advanced Feedback Control Schemes
•
Open Loop and
Feedforward Control
•
Design and Operational Strategies
24.4 Summary
24.1 Introduction
Robots, as mechanical devices, are subject to mechanical strain as a result of loads experienced in their
application. These loads may result from gravity, acceleration, applied contact forces, or interaction with
process dynamics. An effect of strain is deflection and consequent flexibility. No robot escapes this conse-
quence, although the effects may be justifiably ignored in some instances. In the following pages, methods
for predicting and minimizing the adverse consequences of flexibilitywillbe presented. Primarily, arm-like,
serial link devices will be examined, although lessons may often be extended to parallel link (nonserial)
manipulators and mobile robots.
24.1.1 Motivation Based on Higher Performance
Flexibility can be reduced by reducing strain in critical locations. This should first be attempted by sound
design practices for structural and drive components. Wise choices for cross sections and materials ulti-
mately reach their limits and some flexibility will remain. If the resulting design is inadequate because of
more demanding requirements, further steps must be taken. It is these further steps that are the focus of
this section. Higher performance may be required in terms of speed, accuracy, payload mass, arm weight,
or arm bulk. Typically, several or all of these measures have an impact on the utility of the design.
24.1.2 Nature of Impacted Systems
There are early indications that a robot design will be challenged in terms of flexibility. Static deflection and
vibration natural frequency, for the dynamic case, are numerical indicators of this problem. Long arms are
Copyright © 2005 by CRC Press LLC

24
-2 Robotics and Automation Handbook
very susceptible to flexibility problems as arm mass and compliance increase with length. The weight of a
device that must be carried on a mobile platform or launched into space is directly penalized, leading to
severe tradeoffs between flexibility and mobility. When access through narrow openings is desired, as for
servicing a nuclear facility, the cross section of an arm is limited with consequences for flexibility. In order
to reduce cycle time, high accelerations produce loads that excite flexible behavior. The time for vibrations
to settle to the required precision can extend the very cycle time that required the offending accelerations.
Static deflections as well as vibrations may impact the arm’s credentials in a given task if tip positioning
is based on joint measurement. In summary, long, lightweight, thin, quick, and accurate arms are likely
to have problems arising from flexibility. For a more complete discussion of the nature of flexible devices,
the reader can refer to Book [1].
24.1.3 Description of Contents
Discussed in the following pages is the modeling of elastic behavior of material and of the structures
composed of that material. A brief introduction to statics is useful for modeling the modes of failure that
can occur, including excessive flexibility, fracture, and buckling. We focus on flexibility, but that may not be
the active constraint. Kinematics of a flexible arm, discussed next, describes material deformation as well as
joint motion. The dynamic equations are first derived for lumped parameter models consisting of springs
and masses, and then controlled joints are added between the springs. Distributed effects are examined in
two types of models, frequency domain linear models and discretized time domain models. The discussion
of control begins with the simplest feedback controls, and considers their limitations. It progresses to more
complex schemes intended to overcome those limitations. Open loop and feed forward techniques are
equally important and provide the trajectory that the feedback control will try to follow. Improving the
performance may also require rethinking the operational strategies used to deploy the robot arm.
24.2 Modeling
Whenmodeling flexible behavior,weareacknowledgingthe deformableproperties ofengineeringmaterials
that introduce several practical considerations in addition to flexibility. What are the constraints on the
structural geometry and selection of the arm materials? Flexibility must be limited to achieve acceptable
behavior (accuracy, natural frequency, etc.) but other constraints on geometry should be examined as well.
One or more of these constraints will be the active constraint that limits one in creating a light, long, or
fast arm. The arm may yield, it may fail in fatigue, or it may buckle before the flexibility constraint comes
into effect. It is not within the scope of this article to comprehensively treat all of these issues, but it is
essential that they be identified to the reader.
24.2.1 Statics
24.2.1.1 Mechanics of Deformable Bodies
The classical treatment of deformable bodies is appropriate to the analysis of most manipulator struc-
tures. Exceptions are components made of anisotropic materials, that is, materials having a pronounced
directionality in their properties. Truly, these are some of the most exciting materials for combating the
limitations of flexibility. The material itself, typically a composite of two or more elementary materials, is
engineered to contend with the loading conditions expected. The general nature of some arms, however,
prevents a highly specialized design. The quantitative aspects of our analysis will only apply to isotropic
materials.
24.2.1.1.1 Stress vs. Strain
Hooke’s law describes a material where stress (force per unit area) is proportional to strain (change in
dimension per unit dimension). The constant of proportionality between normal stress and extension for
a material in plane strain is the elastic or Young’s modulus, given the symbol E . Another hypothetical
Copyright © 2005 by CRC Press LLC

Flexible Robot Arms 24
-3
deformation is pure shear, in which a rectangular specimen distorts into a parallelogram with a change
in the corner right angles by a shear angle γ . The proportionality between shear stress and shear angle
is the shear modulus commonly denoted G. Mechanics of materials instructs us that the faces of a cubic
differential element in a specimen under stress will have different predictable levels of normal and shear
stress depending on the orientation of the face. Mohr’s circle is often used to display and compute the values
at an arbitrary angle. Failure of the material correlates with these stresses and the manner in which they
are applied as well as environmental conditions. The purposes of this article are served by special cases of
loading that can be used to compute a reasonable prediction of the stress state at the critical location of the
geometry.
The nature of the material (e.g., brittle or ductile) and the local geometry (which leads to stress con-
centration factors) are also required to produce a reasonable prediction of structural failure. For repeated
loading of structural or drive components, one must be concerned about fatigue failure as a result of crack
development and propagation. Although various criteria for failure prediction have been developed, the
Von Mises effective stress [2] is appropriate and convenient for multi-axial stress. It can be calculated from
the principal normal stresses (found on planes with no shear stress) σ
1
, σ
2
, σ
3
, or the normal and shear
stresses at any surface. The Von Mises stress is found as
σ
=
σ
2
1
+ σ
2
2
+ σ
2
3
− σ
1
σ
2
− σ
2
σ
3
− σ
1
σ
3
(24.1)
Static failure in ductile materials is predicted based on failure in shear when the Von Mises stress σ
exceeds the shear strength, normally taken to be one-half the tensile yield strength. Fatigue failure of
ductile materials is predicted when σ
exceeds the stress value that varies with the number of cycles of
loading, and with the mean and alternating stress levels. The Modified Goodman diagram is one accepted
way to determine this value [2]. For ferrous materials, a fatigue limit exists. This is a stress at which there is
no limit to the number of cycles, i.e., the material will never fail. Aluminum and other nonferrous materials
do not exhibit such a limit and will eventually fail (according to this theory) for low levels of stress if the
number of cycles of loading is large enough. The purpose here is not to elaborate on these methods of
machine design, but to provide the engineer with an indication of when these stress-based failure modes
dominate the deflection based failure modes.
Techniques accounting for local factors of stress concentration due to sharp notches and corners will
be found in machine design texts also. Multiplying factors may be applied to the stress or the strength
to account for these factors. Coefficients are based on a combination of empirical and theoretical results.
Again, the purpose here is not served by diversion into these topics. The reader should be aware that they
can be applied and do not change the fundamental results of the following discussion.
Brittle materials (e.g., gray cast iron or extremely cold materials) or materials with uneven maximum
stress in tension and compression do not generally fail in shear, but in tension. Alternative methods of
predicting failure will not be covered here because the components that we analyze for flexibility are seldom
constructed from these materials; however, the extreme conditions of temperature might occur for special
applications.
24.2.1.1.2 Material Properties
The discussion of stress and strain above incorporates a discussion of material properties without elabora-
tion. It serves us well to examine these properties in more detail as they relate to arm flexibility. In particular
we will examine the elastic and shear moduli, the density, damping, and the strength of these materials.
Recognize that bulk materials such as steel or aluminum are not directly comparable in all respects to glass
or Kevlar
®
fibers; however, the numbers give one a useful comparison of the potential of the materials for
use in robot construction.
24.2.1.1.2.1 Elastic and Shear Modulus
The elastic modulus E and the shear modulus G are related through Poisson’s ratio µ as G = E /(2 +
2µ). For a discussion of flexibility these are the two most important material characteristics, closely
Copyright © 2005 by CRC Press LLC
24
-4 Robotics and Automation Handbook
TABLE 24.1 Representative Properties (Various Sources)
Elastic Modulus E Shear Modulus G Density ρ Yield (2%)
Material (GPa) (GPa) (Mg/m
3
) E /ρ Strength (MPa)
Steel-carbon 1040 cold rolled 206.8 80.8 7.8 26.5 490
Stainless steel 301 cold rolled 206.8 80.8 7.8 26.5 1138
Aluminum 6061 heat treated 71.7 26.8 2.8 25.6 276
Kevlar 49
®
120 X 1.45 82.8 2300
a
S Glass fibers 85.5 X 2.49 34.3 X
Magnesium AZ91A die cast 44.8 16.8 1.8 24.9 152
Titanium T1-13 V-11 Cr-3 Al 113.8 42.4 4.4 25.9 1172
Alloy heat treated
X = not available or not relevant.
a
Fails at 1.9% strain.
followed by density. For bulk materials the elastic modulus is independent of orientation of the stress and
equal in compression and tension. It is almost completely independent of alloying modifications of metal
composition that may have a dramatic effect on strength.
24.2.1.1.2.2 Density
Density of the structural material is critical to natural frequency and to the torque requirement of actuators
to lift or accelerate an arm. This is especially true when the arm itself is the main load to be carried, as
in many cases. If geometry is fixed, the natural frequency is proportional to
√
E /ρ in typical bending
modes. Thus, the ratio of modulus to density is a strong indicator of the material’s resistance to dynamic
flexibility limitations. We, therefore, see that the lighter weight, lower stiffness material like aluminum is
comparable to the heavier but stiffer steel. On the other hand, if a large payload is accommodated, steel
gains an advantage because the payload adds less mass on a percentage basis to the steel arm. Materials like
Kevlar
®
are dramatically better in this figure of merit (five times better than most metals). Unfortunately,
constructionusing this fibertoadvantage is aseriousdifficultyand warrantedonly in exceptionalsituations.
The cost is also high.
24.2.1.1.2.3 Strength
Strength refers in general to the load bearing capacity of the material before failure, and is usually cited in
terms of the stress occurring at the point of failure. Since failure may occur in many modes, the reference
to strength by itself is insufficient. At low values of stress, structural materials deform elastically and hence
reversibly. As stress rises above the elastic range a permanent deformation occurs. Yield strength is the top
stress of the elastic range of the material, often defined at a point when 0.2% of strain will not reversibly
disappear on removal of the load. Ultimate strength (tensile, compressive, or shear) refers to stress at the
point of fracture, or separation of two regions of the material. These failure modes could be the result of a
single loading event, whereas fatigue failure is the result of repetitive loading and is more complicated to
describe or predict. For steels and some titanium materials a predictable fatigue limit seems to exist beyond
which an indefinite number of cycles of loading can be sustained. The fatigue limit is the corresponding
stress and is typically 40–50% of the ultimate tensile strength.
24.2.1.1.2.4 Damping
Increased damping reduces the settling time for any vibrations that occur in the arm. Damping inherent
in an arm is due to many things, particularly the material and the manner of construction. A welded
construction looses less energy, thus has less damping than a bolted construction. Any relative motion
between two arm components can remove vibrational energy, and when the damping is very low a small
improvement can result in substantial reductions in settling time. Thus, arms that are back drivable tend
to absorb vibrational energy better than arms which are not back drivable due to high ratio gearboxes,
hydraulic actuators blocked by valves with positive overlap, or even a high position feedback gain. This
can create a dilemma for the designer who wants high accuracy in joint positioning and, thus, chooses
Copyright © 2005 by CRC Press LLC