Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

Trajectory Planning for Flexible Robots 9
-25
Feedforward control uses a system model to create auxiliary forces that are added to the force generated
by the feedback controller. In this way, it can produce a corrective action before the feedback controller has
sensed the problem. With knowledge of the intended trajectory, feedforward control can drive the system
along the trajectory better than when only feedback control is utilized. Because feedforward control can
dominate the forces from the feedback control, unexpected disturbances and errors in the system model
may be problematic when an aggressive feedforward control system is operating.
A highly successful robotic system for trajectory following would likely be composed of four well-
designed components: hardware, feedback control, feedforward control, and command shaping. Each of
the components has its strengths and weaknesses. Luckily, they are all very compatible with each other
and, thus, a good solution will make use of all of them when necessary.
References
[1] Magee, D.P. and Book, W.J., Eliminating multiple modes of vibration in a flexible manipulator,
presented at IEEE International Conference on Robotics and Automation, Atlanta, GA, 1993.
[2] Honegger, M., Codourey, A., and Burdet, E., Adaptive control of the hexaglide, a 6 DOF parallel ma-
nipulator, presented at IEEE International Conference on Robotics and Automation, Albuquerque,
1997.
[3] Singhose, W., Singer, N., and Seering,W., Improving repeatability of coordinate measuringmachines
with shaped command signals, Precision Eng., 18, 138–146, 1996.
[4] Smith, O.J.M., Posicast control of damped oscillatory systems, Proceedings of the IRE, 45, 1249–1255,
1957.
[5] Smith, O.J.M., Feedback Control Systems, McGraw-Hill, New York, 1958.
[6] Bolz, R.E. and Tuve, G.L., CRC Handbook of Tables for Applied Engineering Science, CRC Press, Boca
Raton, FL, 1973.
[7] Singer, N.C. and Seering, W.P., Preshaping command inputs to reduce system vibration, J. Dynamic
Syst., Meas., Control, 112, 76–82, 1990.
[8] Singhose, W., Singer, N., and Seering, W., Time-optimal negative input shapers, ASME J. Dynamic
Syst., Meas., Control, 119, 198–205, 1997.
[9] Bhat, S.P. and Miu, D.K., Precise point-to-point positioning control of flexible structures, J. Dynamic
Syst., Meas., Control, 112, 667–674, 1990.
[10] Tallman, G.H. and Smith, O.J.M., Analog study of dead-beat posicast control, IRE Trans. Autom.
Control, 14–21, 1958.
[11] Singer, N.C., Seering, W.P., and Pasch, K.A., Shaping command inputs to minimize unwanted
dynamics, MIT, Ed.: U.S. Patent 4,916,635, 1990.
[12] Singhose, W.E., Seering, W.P., and Singer, N.C., Input shaping for vibration reduction with specified
insensitivity to modeling errors, presented at Japan-U.S.A. Symposium on Flexible Automation,
Boston, MA, 1996.
[13] Singhose, W.E., Porter, L.J., Tuttle, T.D., and Singer, N.C., Vibration reduction using multi-hump
input shapers, ASME J. Dynamic Syst., Meas., Control, 119, 320–326, 1997.
[14] Singhose, W., Singer, N., Rappole, W., Derezinski, S., and Pasch, K., Methods and appara-
tus for minimizing unwanted dynamics in a physical system, June 10: U.S. Patent 5,638,267,
1997.
[15] Hyde, J.M. and Seering, W.P., Using input command pre-shaping to suppress multiple mode vibra-
tion, presented at IEEE International Conference on Robotics and Automation, Sacramento, CA,
1991.
[16] Singh, T. and Heppler, G.R., Shaped input control of a systemwithmultiplemodes, ASME J. Dynamic
Syst., Meas., Control, 115, 341–347, 1993.
[17] Singhose, W.E., Crain, E.A., and Seering, W.P., Convolved and simultaneous two-mode input
shapers, IEE Control Theory and Applications, 515–520, 1997.
[18] Pao, L.Y., Multi-input shaping design for vibration reduction, Automatica, 35, 81–89, 1999.
Copyright © 2005 by CRC Press LLC
9
-26 Robotics and Automation Handbook
[19] Feddema, J.T., Digital filter control of remotely operated flexible robotic structures, presented at
American Control Conference, San Francisco, CA, 1993.
[20] Kress, R.L., Jansen, J.F., and Noakes, M.W., Experimental implementation of a robust damped-
oscillation control algorithm on a full sized, two-DOF, AC induction motor-driven crane, presented
at 5th ISRAM, Maui, HA, 1994.
[21] Singer, N., Singhose, W., and Kriikku, E., An input shaping controller enabling cranes to move
without sway, presented at ANS 7th Topical Meeting on Robotics and Remote Systems, Augusta,
GA, 1997.
[22] Singhose, W., Porter, L., Kenison, M., and Kriikku, E., Effects of hoisting on the input shaping
control of gantry cranes, Control Eng. Pract., 8, 1159–1165, 2000.
[23] Jansen, J.F., Control and analysis of a single-link flexible beam with experimental verification, Oak
Ridge National Laboratory ORNL/TM-12198, December 1992.
[24] Magee, D.P. and Book, W.J., Filtering micro-manipulator wrist commands to prevent flexible base
motion, presented at American Control Conference, Seattle, WA, 1995.
[25] Seth, N., Rattan, K., and Brandstetter, R., Vibration, control of a coordinate measuring machine,
presented at IEEE Conference on Control Apps., Dayton, OH, 1993.
[26] Jones, S. and Ulsoy, A.G., An approach to control input shaping with application to coordinate
measuring machines, J. Dynamics, Meas., Control, 121, 242–247, 1999.
[27] Rappole, B.W., Singer, N.C., and Seering, W.P., Multiple-mode impulse shaping sequences for re-
ducing residual vibrations, presented at 23rd Biennial Mechanisms Conference, Minneapolis, MN,
1994.
[28] deRoover, D., Sperling, F.B., and Bosgra, O.H., Point-to-point control of a MIMO servomechanism,
presented at American Control Conference, Philadelphia, PA, 1998.
[29] deRoover, D., Bosgra, O.H., Sperling, F.B., and Steinbuch, M., High-performance motion control
of a wafer stage, presented at Philips Conference on Applications of Control Technology, Epe, The
Netherlands, 1996.
[30] Tuttle, T.D. and Seering, W.P., Vibration reduction in flexible space structures using input shaping
on MACE: Mission Results, presented at IFAC World Congress, San Francisco, CA, 1996.
[31] Lim, S., Stevens, H.D., and How, J.P., Input shaping design for multi-input flexible systems, J.
Dynamic Sys., Meas., Control, 121, 443–447, 1999.
[32] Pao, L.Y. and Singhose, W.E., Robust minimum time control of flexible structures, Automatica, 34,
229–236, 1998.
[33] Pao, L.Y., Minimum-time control characteristics of flexible structures, J. Guidance, Control, Dynam-
ics, 19, 123–29, 1996.
[34] Pao, L.Y. and Singhose, W.E., Verifying robust time-optimal commands for multi-mode flexible
spacecraft, AIAA J. Guidance, Control, Dynamics, 20, 831–833, 1997.
[35] Tuttle, T. and Seering, W., Creating time optimal commands with practical constraints, J. Guidance,
Control, Dynamics, 22, 241–250, 1999.
[36] Liu, Q. and Wie, B., Robust time-optimal control of uncertain flexible spacecraft, J. Guidance,
Control, Dynamics, 15, 597–604, 1992.
[37] Singh, T. and Vadali, S.R., Robust time-optimal control: a frequency domain approach, J. Guidance,
Control, Dynamics, 17, 346–353, 1994.
[38] Cutforth, C.F. and Pao, L.Y., A modified method for multiple actuator input shaping, presented at
American Control Conference, San Diego, CA, 1999.
[39] Meyer, J.L. and Silverberg, L., Fuel optimal propulsive maneuver of an experimental structure
exhibiting spacelike dynamics, J. Guidance, Control, Dynamics, 19, 141–149, 1996.
[40] Singhose, W., Bohlke, K., and Seering, W., Fuel-efficient pulse command profiles for flexible space-
craft, AIAA J. Guidance, Control, Dynamics, 19, 954–960, 1996.
[41] Singhose, W., Singh, T., and Seering, W., On-off control with specified fuel usage, J. Dynamic Syst.,
Meas., Control, 121, 206–212, 1999.
Copyright © 2005 by CRC Press LLC
Trajectory Planning for Flexible Robots 9
-27
[42] Wie, B., Sinha, R., Sunkel, J.,and Cox, K., Robust fuel- and time-optimal controlof uncertain flexible
space structures, presented at AIAA Guidance, Navigation, and Control Conference, Monterey, CA,
1993.
[43] Lau, M. and Pao, L., Characteristics of time-optimal commands for flexible structures with limited
fuel usage, J. Guidance, Control, Dynamics, 25, 2002.
[44] Singh, T., Fuel/time optimal control of the benchmark problem, J. Guidance, Control, Dynamics, 18,
1225–31, 1995.
[45] Singhose, W., Banerjee, A., and Seering, W., Slewing flexible spacecraft with deflection-limiting
input shaping, AIAA J. Guidance, Control, Dynamics, 20, 291–298, 1997.
[46] Kojima, H. and Nakajima, N., Multi-objective trajectory optimization by a hierarchical gradient
algorithm with fuzzy decision Logic, presented at AIAA Guidance, Navigation, and Control Con-
ference, Austin, TX, 2003.
[47] Banerjee, A., Pedreiro, N., and Singhose, W., Vibration reduction for flexible spacecraft following
momentum dumping with/without slewing, AIAA J. Guidance, Control, Dynamics, 24, 417–428,
2001.
[48] Tung, E.D. and Tomizuka, M., Feedforward tracking controller design based on the identification
of low frequency dynamics, ASME J. Dynamic Syst., Meas., Control, 115, 348–356, 1993.
[49] Sadegh, N., Synthesis of a stable discrete-time repetitive controller for MIMO systems, J. Dynamic
Sys., Meas., Control, 117, 92–97, 1995.
[50] Tomizuka, M., Zero phase error tracking algorithm for digital control, ASME J. Dynamic Syst., Meas.,
Control, 109, 65–68, 1987.
[51] Gimpel, D.J. and Calvert, J.F., Signal component control, AIEE Transactions, 339–343, 1952.
Copyright © 2005 by CRC Press LLC
10
Error Budgeting
Daniel D. Frey
Massachusetts Institute of Technology
10.1 Introduction
10.2 Probability in Error Budgets
10.3 Tolerances
10.4 Error Sources
10.5 Kinematic Modeling
10.6 Assessing Accuracy and Process Capability
Sensitive Directions
•
Correlation among Multiple Criteria
•
Interactions among Processing Steps
•
Spatial Distribution
of Errors
10.7 Modeling Material Removal Processes
10.8 Summary
10.1 Introduction
An error budget is a tool for predicting and managing variability in an engineering system. Error budgets
are particularly important for systems with stringent accuracy requirements such as robots, machine tools,
coordinate measuring machines, and industrial automation systems. To provide reasonable predictions of
accuracy, an error budget must include a systematic account of error sources that may affect a machine.
Error sources include structural compliance, thermally induced deflections, and imperfections in machine
components. An error budget must transmit these error sources through the system and determine the
effects on the position of end effectors, work-pieces, and/or cutting tools. Ultimately, an error budget
should combine the effects of multiple error sources to determine overall system performance which is
often determined by the tolerances held on finished goods.
Error budgeting was first comprehensively applied to the design of an industrial machine by Donaldson
[1]. Over the past two decades error budgeting methods have been improved and extended by several
researchers [2–7] and applied to a wide variety of manufacturing-related systems [1, 8–11]. Error budgets
are also frequently applied to optical systems, weapons systems, satellites, and so on, but this article will
focus on robotics, manufacturing, and industrial automation.
An appropriately formulated error budget allows the designer to make better decisions throughout
the design cycle. When bidding on a machine contract, an error budget provides evidence of feasibility.
During conceptual design, an error budget aids in selection among different machine configurations.
During system design the error budget can be used to allocate allowable error among subsystems to
balance the level of difficulty across design teams. At the detailed design stage, an error budget can inform
selection of components, materials, and manufacturing process steps. Error models of machine tools
can also be used to enhance machine accuracy [12]. During operation, an error model can be used for
diagnosis if system accuracy degrades [13] or to help schedule routine maintenance [5]. Error budgets can
Copyright © 2005 by CRC Press LLC

10
-2 Robotics and Automation Handbook
also improve acceptance procedures because tolerances can be evaluated more effectively using a statistical
model of expected manufacturing errors [14].
Error budgeting is a multidisciplinary topic. Several fields of engineering science and mathematics
must be applied to achieve good results. The subsections below provide an introduction to the required
foundations. The first topic is probability, which enables more rigorous development throughout the
subsequent chapters. Next is a discussion of tolerancing and process capability, which defines the required
outputs of an error budget. The remaining sections concern the construction of an error budget including
characterization of error sources,kinematic modeling, combination of multiple error effects, and modeling
of the material removal processes.
10.2 Probability in Error Budgets
Error budgets codify our knowledge about variability and uncertainty of an engineering system. This
article must therefore rely substantially on probabilistic and statistical concepts. This section provides
an overview of basic concepts including random variables, probability density functions, mean, standard
deviation, and sums of random variables.
A random variable is a quantity that may take different values at different times or under different con-
ditions. Random variables may be used to describe quantities about which we have imperfect knowledge.
For example, the ambient temperature in a factory may vary from morning to night, from one day to
another, and from season to season. There may be bounds on our uncertainty. For example, we may be
confident that an HVAC system will maintain the ambient temperature within a few degrees of a specified
value.
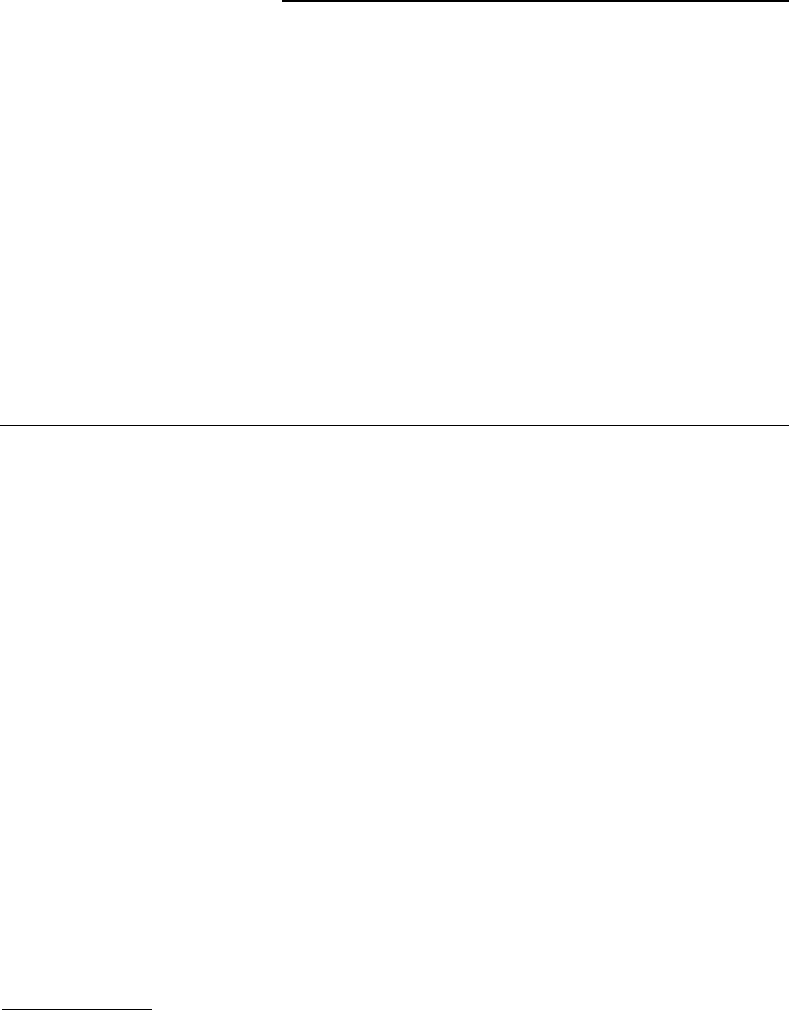
A probability density function (pdf) can codify one’s knowledge and uncertainty about a random
variable. A pdf represents the probability that a random variable will be within any given range of values.
As depicted in Figure 10.1, given a random variable x, the pdf f
x
(x)isdefined so that the probability that
x lies in a range between lower limit L and upper limit U is
P
{
L < x ≤ U
}
=
U
L
f
x
(x)dx (10.1)
Given that any random variable must take some value, it follows that
∞
−∞
f
x
(x)dx = 1. And given that
the probability of x taking any particular value cannot be negative, it follows that 0 ≤ f
x
(x) for all x.
In error budgeting, we often need to determine whether two random variables are independent of one
another, that is, if one variable carries information about the other. The concept of a probability density
function (Equation 10.1) allows us to rigorously define the concept of statistical independence. Random
variables x and y are said to be statistically independent if and only if
f
xy
(x, y) = f
x
(x) f
y
(y) (10.2)
A consequence of independence is that the probability that x and y both lie within ranges defined over
each variable is simply the product of the probability that either one lies within its specified range.
In error budgets we often wish to keep our description of random variables simple. One way to do that
is to focus on a measure of central tendency of the variable and a measure of spread of the variable. The
most natural measure of central tendency for use in error budgeting is the expected value, E (x), which is
also known as the mean, µ(x).
E (x) = µ(x) =
b
a
x · f
x
(x)dx (10.3)
Copyright © 2005 by CRC Press LLC
Error Budgeting 10
-
3
The most common measure of spread for use in error budgeting is the standard deviation σ (x).
σ (x) =
E ((x − E (x))
2
) (10.4)
It is often reasonable to assume that randomvariables are distributed according to a normal distribution.
In this case, the probability density function is fully defined by just the mean and standard deviation
f
x
(x) =
1
σ
√
2π
e
−
(x−µ)
2
2σ
2
(10.5)
In some cases, it may be more practical to characterize a random variable by stating a range of possible
values and assuming that any value within that range is equally probable (i.e., that the random variable is
uniformly distributed). The probability density function for a uniformly distributed variable x that ranges
from L to U is equal to 1/(U − L) everywhere within its range and is zero everywhere outside that range.
The mean of the variable is the center of the range (U +L)/2, and the standard deviation is (U − L)/2
√
3.
In error budgeting, it is necessary to combine the effects of many random variables. This combination
can often be accurately modeled as a sum. Fortunately, there are fairly simple rules for summation of
random variables. The means of random variables can be summed in a straightforward way
E (x + y) = E (x) + E (y)
(10.6)
Equation (10.6) holds regardless of distributions of the random variables or whether the variables are
independent.
The combination rule for standard deviations is sometimes known as the “root sum of squares” or
“RSS” rule
σ (x + y) =
σ
2
(x) + σ
2
(y) (10.7)
Equation (10.7) has one very important restriction in its use. It applies only if the variables x and y are
probabilistically independent as defined in Equation (10.2) [15]. If the variables are not independent, then
the variation in the sum could be much higher than that given by the RSS rule but not higher than a sum
of the standard deviations. The standard deviation of the sum could also be lower than that given by the
RSS rule, especially if the correlations are induced deliberately as in selective assembly techniques or in
machines designed to compensate for existing errors.
10.3 Tolerances
Error budgets are intimately tied to concepts of product tolerance and manufacturing process capability.
An error budget is a tool for managing variation and uncertainty, tolerances are ways of placing limits on
variation, and process capability is a measure of a system’s ability to manufacture products that meet their
associated tolerances.
A widely used standard for tolerancing is ANSI Y14.5M [16]. According to this standard, each feature of
a part has dimensions with associated tolerances. A feature is “the general term applied to a physical portion
of a part, such as a surface, hole, or slot.” A dimension is “a numerical value expressed in appropriate units
L
U
x
f
x
(
x
)
P
{
L
<
x
≤
U
}
FIGURE 10.1 Probability density functions.
Copyright © 2005 by CRC Press LLC
10
-4 Robotics and Automation Handbook
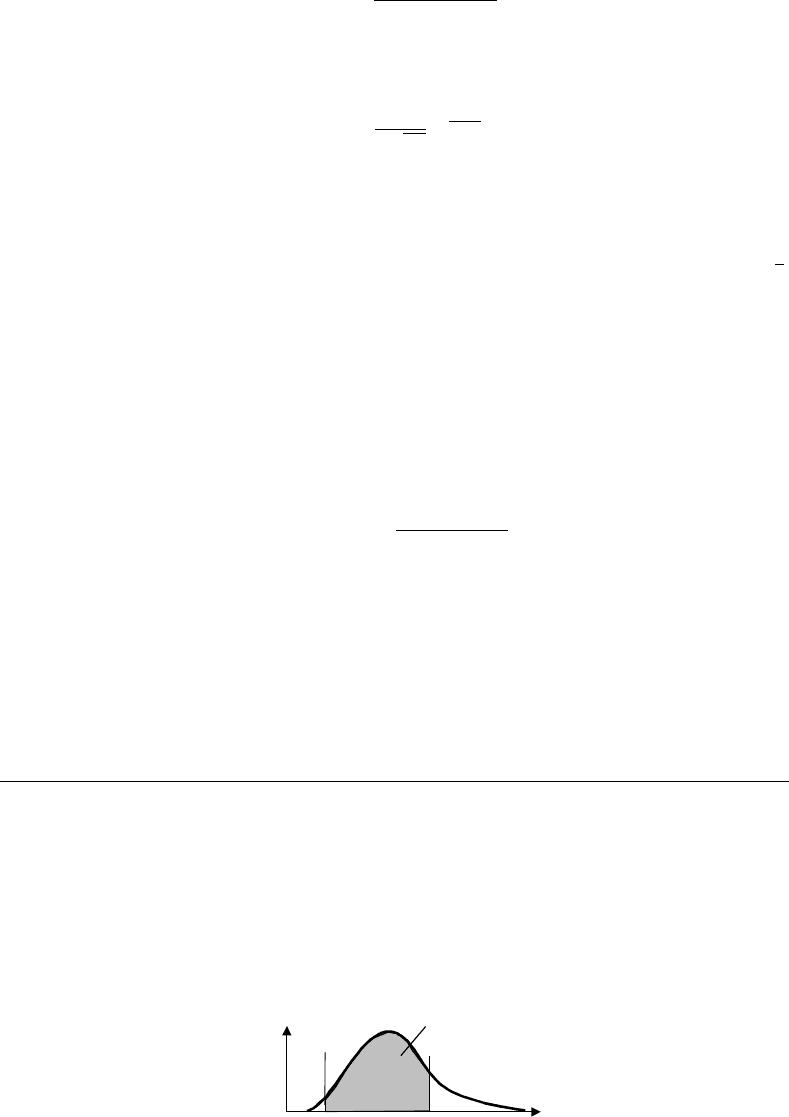
0.25
THIS ON A DRAWING
MEANS THIS
0.25 wide
tolerance zone
FIGURE 10.2 ANSI definition of circularity for a sphere.
of measure . . . to define the size or geometric characteristic, or both, of a part or feature.” A tolerance is
the amount by which a dimension is permitted to vary. Tolerances are defined in different ways depending
on the type of dimension and can be classified according to their spatial frequency:
r
Tolerances on surface finish (highest spatial frequencies)
r
Tolerances of size and location (zero spatial frequency or “DC” component of error) — Tolerances
of size and location are usually defined by a basic dimension (the ideal size or location), and upper
and lower limits.
r
Tolerances of form (intermediate spatial frequencies) — A form tolerance defines a zone in which
all the points on the surface of a part must lie. For example, a tolerance of circularity specifies that
each element of the surface in a plane perpendicular to an axis must lie between two concentric
circles (Figure 10.2).
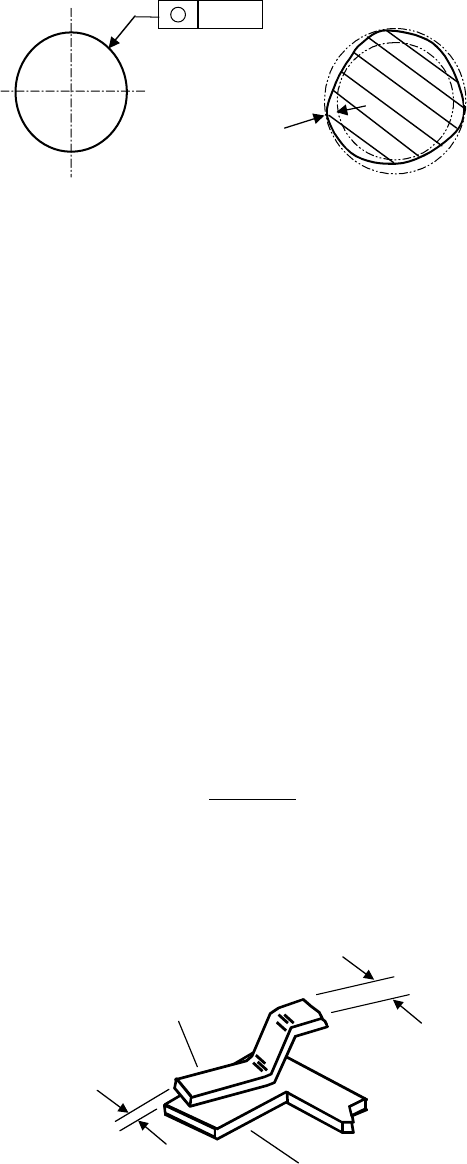
Specialized standards exist for many different manufacturing processes. In defense electronics, the
acceptance criteria for lead alignment with pads is defined by MIL-STD 2000A. Figure 10.3 depicts the
military standard for positioning of a lead from an electronic component with respect to a land or pad on
a printed wiring board.
Given any set of specifications for a product, a manufacturing system can be rated in terms of its
ability to meet that tolerance. The most common measures are the process capability index (C
p
) and the
performance index (C
pk
) [17]. The process capability index (C
p
)isdefined as
C
p
≡
(
U − L
)
/2
3σ
(10.8)
whereU and L are upper and lower limits of the tolerance and σ is the standard deviation of the dimension
in the population of parts made by that system. The process capability index is a dimensionless ratio of
the amount of variation that can be tolerated and the amount of variation present. It is a useful measure
W
>25%
W
Lead
Land
FIGURE 10.3 Specification for foot side overhang of electronic leads.
Copyright © 2005 by CRC Press LLC
Error Budgeting 10
-
5
of the capability of a manufacturing system, but it does not account for bias, the difference between the
mean value of the dimension and target value. The process capability index can be modified to include
the effect of bias which leads to the definition of a performance index C
pk
.
C
pk
≡ C
p
(1 −k) (10.9)
where k is a dimensionless ratio of the absolute value of the bias and tolerance width.
k ≡
µ −
U+L
2
(U − L)/2
(10.10)
The performance index (C
pk
) is closely correlated to the yield of a manufacturing system under the
influence of both variation and bias. C
pk
is often used as a measure of success in six sigma programs [18].
Many products have multiple features, each with an associated tolerance. For products with multiple
tolerances,engineeringspecifications generally require simultaneous conformance to all criteria. Therefore,
a measure of manufacturing system capability is rolled throughput yield (Y
RT
) [18], which is defined as
the probability that all the quality characteristics of any product will meet their associated tolerance limits.
As defined by American National Standards Institute (ANSI), product acceptance is binary — either a
part is accurate enough or it is defective. Furthermore, variations within the tolerance limits are defined
as permissible. However, most deviations from perfect form, even those within tolerance, can contribute
degraded performance and lower value in the eyes of the customer. To reflect this reality, quality loss
functions were proposed by Taguchi as a means to quantify the economic impacts of variation. The
simplest form of quality loss function is a quadratic loss function
Quality Loss =
A
o
[
(U − L)/2
]
2
d −
U + L
2
2
(10.11)
where d is the dimension of the part and A
o
is the cost to scrap or rework the part [19]. It can be shown
that, for a system which exhibits both variation and bias, the expected value of quality loss is
E(Quality Loss) =
A
o
[(U − L)/2]
2
µ −
U + L
2
2
+ σ
2
= A
o
k
2
+
1
9C
2
p
(10.12)
Equation (10.12) shows that expected quality loss is equally influenced by the variance and the squared
bias. Equation (10.12) also shows a link between expected quality loss and process capability. Expected
quality loss is similar to the performance index C
pk
in that both are functions of k and C
p
, but expected
quality loss more clearly shows the effects of variation on the value delivered to the customer.
10.4 Error Sources
An error source is the physical cause of inaccuracy. An essential step in building an error budget is to
list and characterize the most important error sources affecting the system. Table 10.1 lists error sources
commonly included in an error budget. The table is not exhaustive but it does provide a representative set
of the main error sources in robots, machine tools, and coordinate measuring machines.
The error sources for linear and rotary joints listed at the top of Table 10.1 are considered to be
fundamental in forming an error budget. For example, a prismatic three-axis robot, CMM, or machine
tool is said to have 21 fundamental measurable errors [3]. For each axis there are three rotary errors
(roll, pitch, and yaw), two straightness errors, and one drive-related error motion. That makes six error
motions per axis. With three axes, that makes 18 errors associated with the axes individually. In addition,
there are three squareness errors which describe the imperfection in assembling the axes into a mutually
perpendicular set.
Copyright © 2005 by CRC Press LLC
10
-6 Robotics and Automation Handbook
TABLE 10.1 Sources of Error Typically Included in an Error Budget
Error Source Description
Errors for linear axes
Straightness Linear axes exhibit imperfections in straightness in the two directions perpendicular
to the direction of motion.
Squareness When two linear axes are intended to be mutually perpendicular there is an error in their
squareness. One error is associated with each pair of axes.
Angular error motions Every carriage may exhibit three angular error motions. Roll is the rotational error motion
(roll, pitch, and yaw) about the axis of intended linear motion. Pitch and yaw are the other two error motions.
Drive related errors Lead screws can have error in the advance per revolution (cumulative lead error) and can also
exhibit periodic errors that repeat every revolution (once per revoulition lead error).
Drives for a stage can also exhibit backlash (lost motion) which occurs when the direction of
movement is reversed.
Errors for rotary axes
Parallelism When two rotary axes are intended to be parallel, there are two errors required to describe
the lack of parallelism between two axes.
Linear error motions Rotory axes may exhibit unintended linear motions as they rotate. The motions along the axis
of rotation are known as face motions. The motions in the other two directions are radial
error motions which contribute to run-out.
Angular error motions Rotary axes may exhibit random error motion about either of the two axes perpendicular to
the axis of rotation.
Drive related errors Rotary axes each have one error associated with the difference between the commanded and
the realized angular position. These errors are often associated with the finite resolution of
the encoder.
Load induced deformation The weight of the payload, arms, and carriages or the forces applied by the machine to the
workpiece result in deflections of the machine’s components due to their limited stiffness.
Dynamic effects Acceleration due to external influences (vibration of the floor) or internal sources (vibration
of motors or acceleration of the machine’s carriages) lead to deflections due to the machine’s
limited stiffness and damping.
Thermal deformation Heating of the machine due to internal or external sources results in deformation of the
machine’s components due to either differences in thermal expansion coefficients or
non-uniform temperature distributions.
Fixturing errors The workpiece is held by the machine imperfectly due to the variable dimensions of the
part itself or the inherent non-repeatability of the fixturing process.
Tool related errors In material removal processes, cutting tools contribute to error due to wear, scalloping,
chatter, deflection, etc.
There are many types of errors that may be included in an error budget such as thermally induced
deflections, dynamic effects, and so on. However, error sources should only be characterized as funda-
mentally as is useful for the purpose at hand [1]. For example, Table 10.1 lists thermal deformation as a
key error source. It is not always necessary to characterize temperature variation directly. In some cases
it is more convenient to include thermal error in the distribution function for squareness, straightness,
etc.
Once a list of error sources has been made, each error source should be characterized with measures
that enable probabilistic analysis. Typically, error sources are described by means and standard deviations
or upper and lower limits. In many cases it is also necessary to describe the frequency content or spatial
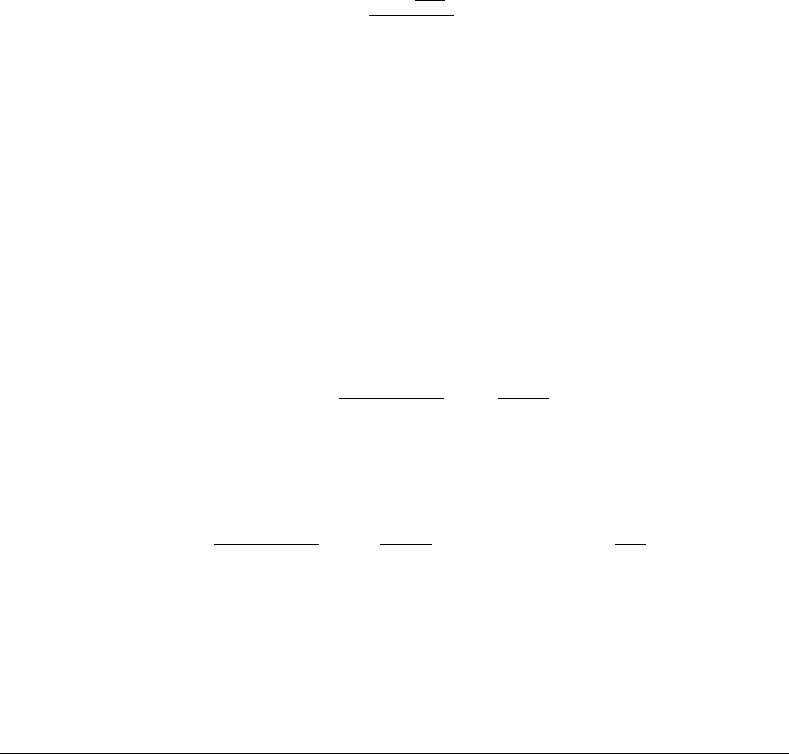
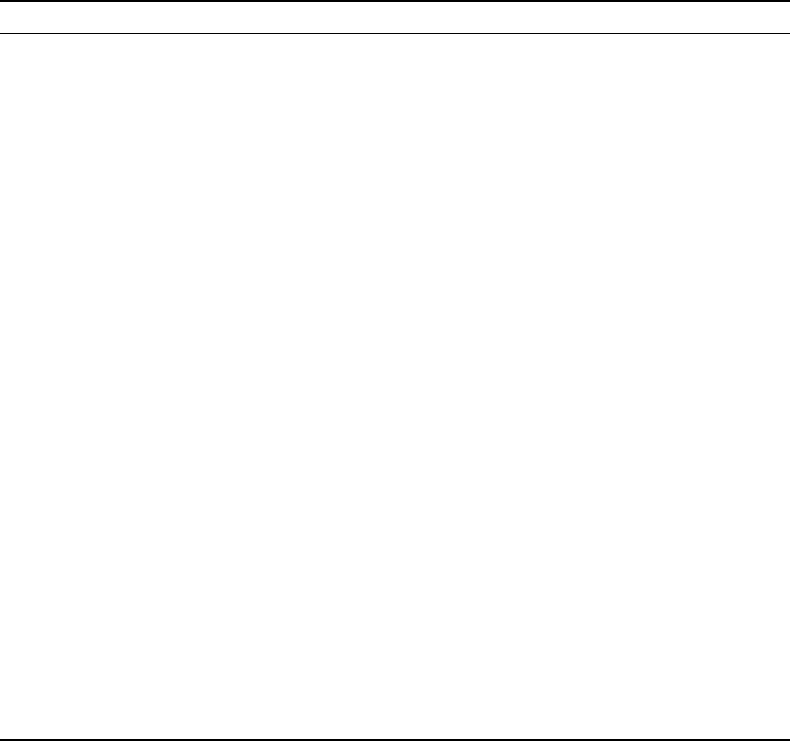
distribution properties of the errors. For example, many linear drives are based on a lead screw. These
drives exhibit periodic errors that repeat each time the screw completes a full revolution. They also exhibit
a cumulative error that increases as the lead screw turns over and over (Figure 10.4).
An important step in forming an error budget is to gather needed information about the error sources.
In some cases the needed information is available from component suppliers. For example, the cumulative
lead error and once per revolution lead error are normally quantified by the lead screw manufacturer.
In other cases, the errors will have to be estimated based on engineering science. For example, the load
induced deformation can usually be estimated early in the design stage using beam theory and can be
refined later in the design using finite element analysis.
Copyright © 2005 by CRC Press LLC
Error Budgeting 10
-
7
Cumulative lead error (µm/mm)
Once per revolution lead error (µm)
1 revolution
Nominal travel (mm)
Lead deviation (µm)
FIGURE 10.4 Cumulative and once per revolution lead error associated with a lead screw drive for a linear actuator.
Once the error sources have been listed and characterized, it is necessary to infer the effects of the errors
on the machine’s motions. The next section will show how to do this via kinematic modeling.
10.5 Kinematic Modeling
Kinematics is a subset of dynamics concerned with the study of motion without reference to mass or force.
A kinematic model of a robot or machine tool describes how the components of the machine are arranged
in space and how the components move with respect to one another. In error budgeting, a kinematic
model includes both the intended motions and any unintended motions due to error sources. The value
of kinematic models in error budgeting is widely recognized [1, 2].
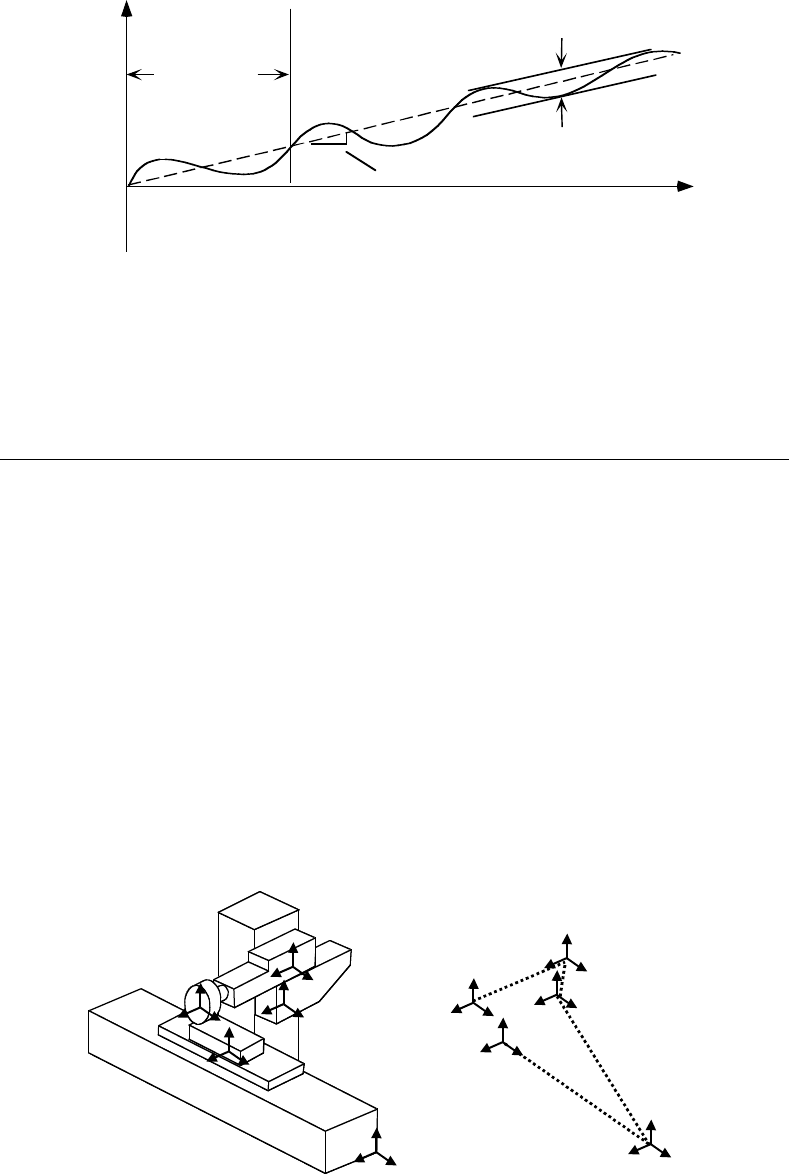
An important first step in building a kinematic model is to assign local coordinate systems (LCSs) to
each of the rigid bodies of the machine. These local coordinate systems will serve as reference points for
describing the motions of the machine’s components. All angular motions will be made about the axes of
these LCSs, so it is good practice to assign the LCS to a rigid body at the center of stiffness of the joint that
attaches it to the rest of the machine. As an example, LCSs are assigned to a surface grinder in Figure 10.5.
The local coordinate systems are usually configured in two serial kinematic chains. One chain extends
from the base of the machine out to an end effector or cutting tool. The other chain extends from the
base out to the workpiece. The serial chains describe the topology of the machine — how each component
is connected to other components and eventually connected to the base. This topology is critical to the
kinematic model because whenever a body moves, all the other bodies farther out on the same chain also
execute the same motion.
Base
Base
FIGURE 10.5 A surface grinder with local coordinate systems and the resulting serial kinematic chains.
Copyright © 2005 by CRC Press LLC