Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

Trajectory Planning for Flexible Robots 9
-5
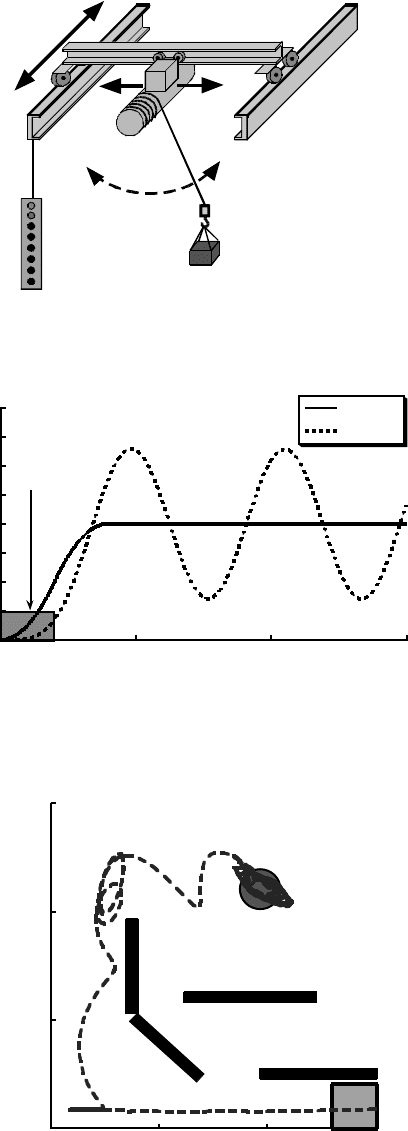
Payload
Trolley
Bridge
Control
Pendant
FIGURE 9.6 Overhead bridge crane.
0
1
2
3
4
5
6
7
8
0 5 10 15
Position
Trolley
Payload
Button On
Time
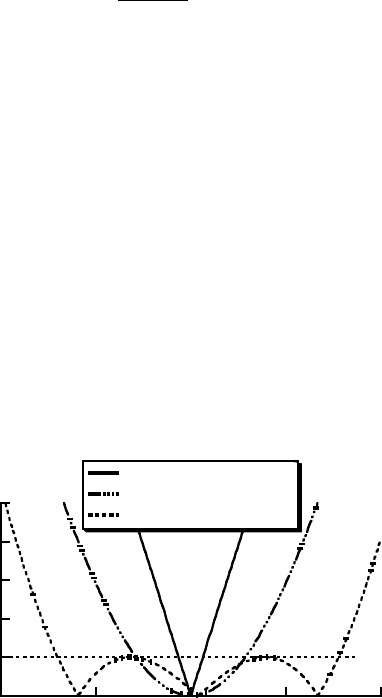
FIGURE 9.7 Crane response when operator presses move button.
0
50
100
150
−150 −100 −50 0
Y Position
X Position
Start
Finish
FIGURE 9.8 Payload response moving through an obstacle field.
Copyright © 2005 by CRC Press LLC

9
-6 Robotics and Automation Handbook
0
1
2
3
4
5
6
7
8
0 5 10 15
Trolley
Payload
Position
Time
Button On
FIGURE 9.9 Crane response when operator presses move button two times.
a bridge crane payload while it is being driven through an obstacle field by a novice operator. There is
considerable payload sway both during the transport and at the final position. These data were obtained
via an overhead camera that tracked the payload motion but was not capable of measuring the position for
feedback control purposes. An experienced crane operator can often produce the desired payload motion
with much less vibration by pressing the control buttons multiple times at the proper time instances.
This type of operator command and payload response for planar motion is shown in Figure 9.9. When
compared with the response shown in Figure 9.7, the benefits of properly choosing the reference command
are obvious. This is the type of effect that the command generator block in Figure 9.5 strives to achieve.
9.2.2 Generating Zero Vibration Commands
As a first step to understanding how to generate commands that move flexible robots without vibration,
it is helpful to start with the simplest such command. A fundamental building block for all commands
is an impulse. This theoretical command is often a good approximation of a short burst of force such as
that from a hammer blow or from momentarily turning the actuator full on. Applying an impulse to a
flexible robot will cause it to vibrate. However, if we apply a second impulse to the robot, we can cancel the
vibration induced by the first impulse. This conceptis demonstrated in Figure 9.10. Impulse A
1
induces the
vibration indicated by the dashed line, while A
2
induces the dotted response. Combining the two responses
using superposition results in zero residual vibration. The second impulse must be applied at the correct
time and must have the appropriate magnitude. Note that this two-impulse sequence is analogous to the
two-pulse crane command shown in Figure 9.9.
−0.4
−0.2
0
0.2
0.4
0.6
0 0.5 1 1.5 2 2.5 3
A1 Response
A2 Response
Total Response
Position
Time
A
1
A
2
FIGURE 9.10 Two impulses can cancel vibration.
Copyright © 2005 by CRC Press LLC

Trajectory Planning for Flexible Robots 9
-7
In order to derive the amplitudes and time locations of the two-impulse command shown in Figure 9.10,
a mathematical description of the residual vibration that results from a series of impulses must be utilized.
If the system’s natural frequency is ω and the damping ratio is ζ , then the residual vibration that results
from a sequence of impulses applied to a second-order system can be described by [5–7]
V(ω, ζ ) = e
−ζωt
n
[C(ω, ζ )]
2
+ [S(ω, ζ )]
2
(9.1)
where,
C(ω, ζ ) =
n
i=1
A
i
e
ζωt
i
cos(ω
d
t
i
) and S(ω, ζ ) =
n
i=1
A
i
e
ζωt
i
sin(ω
d
t
i
) (9.2)
A
i
and t
i
are the amplitudes and time locations of the impulses, n is the number of impulses in the impulse
sequence, and
ω
d
= ω
1 −ζ
2
(9.3)
Note that Equation (9.1) is expressed in a nondimensional form. It is generated by taking the absolute
amplitude of residual vibration from an impulse series and then dividing by the vibration amplitude from
a single, unity-magnitude impulse. This expression predicts the percentage of residual vibration that will
remain after input shaping has been implemented. For example, if Equation (9.1) has a value of 0.05 when
the impulses and system parameters are entering into the expression, then input shaping with the impulse
sequence should reduce the residual vibration to 5% of the amplitude that occurs without input shaping.
Of course, this result applies to only underdamped systems, because overdamped systems do not have
residual vibration.
To generate an impulse sequence that causes no residual vibration, we set Equation (9.1) equal to zero
and solve for the impulse amplitudes and time locations. However, we must place a few more restrictions
on the impulses, because the solution can converge to zero-valued or infinitely-valued impulses. To avoid
the trivial solution of all zero-valued impulses and to obtain a normalized result, we require the impulse
amplitudes to sum to one:
A
j
= 1 (9.4)
At this point, the impulses could satisfy Equation (9.1) by taking on very large positive and negative values.
These large impulses would saturate the actuators. One way to obtain a bounded solution is to limit the
impulse amplitudes to positive values:
A
i
> 0, i = 1, ..., n (9.5)
Limiting the impulses to positive values provides a good solution. However, performance can be pushed
even further by allowing a limited amount of negative impulses [8].
The problem we want to solve can now be stated explicitly: find a sequence of impulses that makes Equa-
tion (9.1) equal to zero, while also satisfying Equation (9.4) and Equation (9.5).
1
Because we are looking
for the two-impulse sequence shown in Figure 9.10 that satisfies the above specifications, the problem has
four unknowns — the two impulse amplitudes (A
1
, A
2
) and the two impulse time locations (t
1
, t
2
).
Without loss of generality, we can set the time location of the first impulse equal to zero:
t
1
= 0 (9.6)
The problem is now reduced to finding three unknowns (A
1
, A
2
, t
2
). In order for Equation (9.1) to equal
1
This problem statement and solution are similar to one first published by Smith [4] in 1957.
Copyright © 2005 by CRC Press LLC

9
-8 Robotics and Automation Handbook
zero, the expressions in Equation (9.2) must both equal zero independently because they are squared in
Equation (9.1). Therefore, the impulses must satisfy
0 =
2
i=1
A
i
e
ζωt
i
cos(ω
d
t
i
) = A
1
e
ζωt
1
cos(ω
d
t
1
) + A
2
e
ζωt
2
cos(ω
d
t
2
) (9.7)
0 =
2
i=1
A
i
e
ζωt
i
sin(ω
d
t
i
) = A
1
e
ζωt
i
sin(ω
d
t
1
) + A
2
e
ζωt
2
sin(ω
d
t
2
) (9.8)
Substituting Equation (9.6) into Equation (9.7) and Equation (9.8) reduces the equations to
0 = A
1
+ A
2
e
ζωt
2
cos(ω
d
t
2
) (9.9)
0 = A
2
e
ζωt
2
sin(ω
d
t
2
) (9.10)
In order for Equation (9.10) to be satisfied in a nontrivial manner, the sine term must equal zero. This
occurs when its argument is a multiple of π:
ω
d
t
2
= pπ, p = 1, 2, ... (9.11)
In other words
t
2
=
pπ
ω
d
=
pT
d
2
, p = 1, 2, ...
(9.12)
where T
d
is the damped period of vibration. This result tells us that there are an infinite number of possible
values for the location of the second impulse — they occur at multiples of the half period of vibration.
The solutions at odd multiples of the half period correspond to solutions with positive impulses, while
those at even multiples would require a negative impulse. Time considerations require using the smallest
value for t
2
, that is
t
2
=
T
d
2
(9.13)
The impulse time locations can be described very simply; the first impulse is at time zero and the second
impulse is located at half the period of vibration.For this simple two-impulse case, the amplitude constraint
given in Equation (9.4) reduces to:
A
1
+ A
2
= 1
(9.14)
Using the expression for the damped natural frequency given in Equation (9.3) and substituting Equation
(9.13) and Equation (9.14) into Equation (9.9) gives
0 = A
1
− (1 − A
1
)e
ζπ
√
1−ζ
2
(9.15)
Rearranging Equation (9.15) and solving for A
1
gives
A
1
=
e
ζπ
√
1−ζ
2
1 +e
ζπ
√
1−ζ
2
(9.16)
To simplify the expression, multiply top and bottom of the right-hand side by the inverse of the exponential
term to get
A
1
=
1
1 + K
(9.17)
Copyright © 2005 by CRC Press LLC

Trajectory Planning for Flexible Robots 9
-9
02 0
∗
Initial Command Input Shaper
∆
02
∆
2 + ∆
Shaped Command
FIGURE 9.11 Input shaping a short pulse command.
where the inverse of the exponential term is
K = e
−ζπ
√
1−ζ
2
(9.18)
substituting Equation (9.17) back into Equation (9.14), we get
A
2
=
K
1 + K
(9.19)
The sequence of two impulses that leads to zero vibration (ZV) can now be summarized in matrix
form as
A
i
t
o
=
1
1+K
K
1+K
00.5T
d
(9.20)
9.2.3 Using Zero-Vibration Impulse Sequences to Generate
Zero-Vibration Commands
Real systems cannot be moved around with impulses, so we need to convert the properties of the impulse
sequence given in Equation (9.20) into a usable command. This can be done by simply convolving the
impulse sequence with any desired command. The convolution product is then used as the command to the
system. If the impulse sequence, also known as an input shaper, causes no vibration, then the convolution
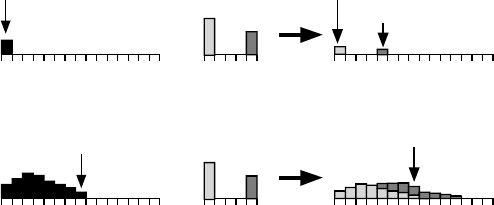
product will also cause no vibration [7, 9]. This command generation process, called input shaping, is
demonstrated in Figure 9.11 for an initial pulse function. This particular input shaper was designed for an
undamped system, so both impulses have the same amplitude. Note that the convolution product in this
case is the two-pulse command shown in Figure 9.9, which moved the crane with no residual vibration.
In this case, the shaper is longer than the initial command, but in most cases the impulse sequence will be
much shorter than the command profile. This is especially true when the baseline command is generated
to move a robot through a complex trajectory and the periods of the system vibration are small compared
with the duration of the trajectories. When this is the case, the components of the shaped command
that arise from the individual impulses run together to form a smooth continuous function as shown in
Figure 9.12.
∗
Initial Command Input Shaper Shaped Command
FIGURE 9.12 Input shaping a generic trajectory command.
Copyright © 2005 by CRC Press LLC
9
-10 Robotics and Automation Handbook
9.2.4 Robustness to Modeling Errors
The amplitudes and time locations of the impulses depend on the system parameters (ω and ζ ). If there
are errors in these values (and there always are), then the input shaper will not result in zero vibration. In
fact, when using the two-impulse sequence discussed above, there can be a noticeable amount of vibration
for a relatively small modeling error. This lack of robustness was a major stumbling block for the original
formulation of this idea that was developed in the 1950s [10].
This problem can be visualized by plotting a sensitivity curve for the input shaper. These curves show
the amplitude of residual vibration caused by the shaper as a function of the system frequency and/or
damping ratio. One such sensitivity curve for the zero-vibration (ZV) shaper given in Equation (9.20) is
shown in Figure 9.13 with a normalized frequency on the horizontal axis and the percentage vibration on
the vertical axis. Note that as the actual frequency ω deviates from the modeling frequency ω
m
, the amount
of vibration increases rapidly.
The first input shaper designed to have robustness to modeling errors was developed by Singer and
Seering in the late 1980s [7, 11]. This shaper was designed by requiring the derivative of the residual
vibration, with respect to the frequency, to be equal to zero at the modeling frequency. Mathematically,
this can be stated as
∂V(ω, ζ )
∂ω
= 0
(9.21)
Including this constraint has the effect of keeping the vibration near zero as the actual frequency starts to
deviate from the modeling frequency. The sensitivity curve for this zero vibration and derivative (ZVD)
shaper is also shown in Figure 9.13. Note that this shaper keeps the vibration at a low level over a much
wider range of frequencies than the ZV shaper.
Since the development of the ZVD shaper, several other robust shapers have been developed. In fact,
shapers can now be designed to have any amount of robustness to modeling errors [12]. Any real robotic
system will havesome amount of tolerable vibration; real machines arealwaysvibrating at some level. Using
this tolerance, a shaper can be designed to suppress any frequency range. The sensitivity curve for a very
robust shaper is included in Figure 9.13 [12–14]. This shaper is created by establishing a tolerable vibration
limit V
tol
and then restricting the vibration to below this value over any desired range of frequency errors.
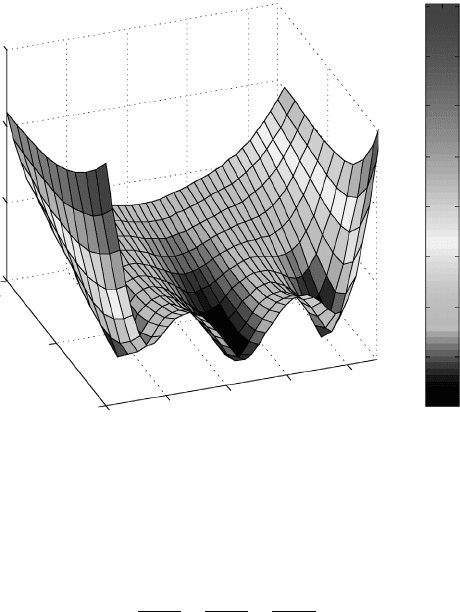
Input shaping robustness is not restricted to errors in the frequency value. Figure 9.14 shows a three-
dimensional sensitivity curve for a shaper that was designed to suppress vibration between 0.7 and 1.3 Hz
and also over the range of damping ratios between 0 and 0.2. Notice that the shaper is very robust to
changes in the damping ratio.
To achieve greater robustness, input shapers generally must contain more than two impulses and their
durations must increase. For example, the ZVD shaper [7] obtained by satisfying Equation (9.21) contains
0
5
10
15
20
25
0.5 0.75 1 1.25 1.5
ZV Shaper
Robust (ZVD) Shaper
Very Robust Shaper
Percentage Vibration
Normalized Frequency (w/w
m
)
V
tol
FIGURE 9.13 Sensitivity curves of several input shapers.
Copyright © 2005 by CRC Press LLC
Trajectory Planning for Flexible Robots 9
-11
0.15
0.16
0.12
0.1
0.14
0.08
0.06
0.04
0.02
0.05
0.2
0.6
0.8
1.2
1.4
1
0
0
0.1
0.1
Residual
Vibration
Damping
Ratio, z
Frequency (Hz)
FIGURE 9.14 Three-dimensional sensitivity curve.
three impulses given by
A
i
t
i
=
1
(1+K )
2
2K
(1+K )
2
K
2
(1+K )
2
00.5T
d
T
d
(9.22)
The increase in shaper duration means that theshaped commandwill also increasein duration.Fortunately,
even very robust shapers have fairly short durations. For example, the ZVD shaper has a duration of only
one period of the natural frequency. This time penalty is often a small cost in exchange for the improved
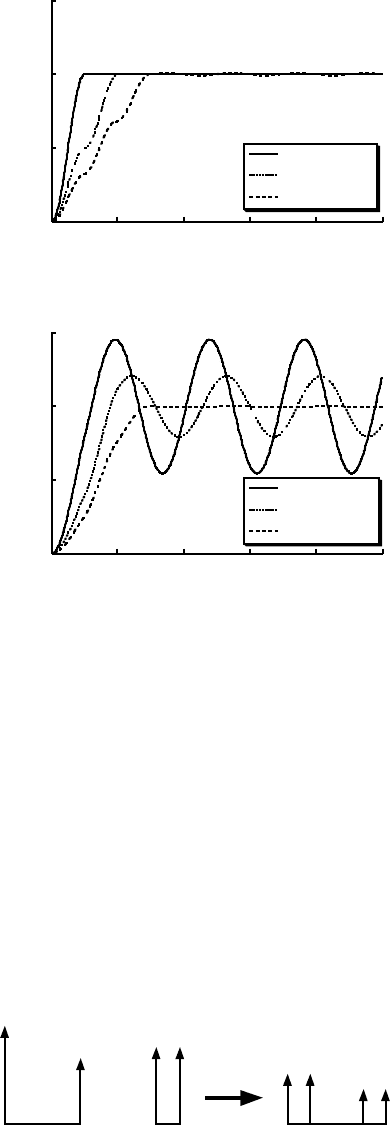
robustness to modeling errors. To demonstrate this tradeoff, Figure 9.15 shows the response of a spring-
mass system to step commands shaped with the three shapers used to generate Figure 9.13. Figure 9.15a
shows the response when the model is perfect, and Figure 9.15b shows the case when there is a 30% error
in the estimated system frequency. The increase in rise time caused by the robust shapers is apparent
in Figure 9.15a, while Figure 9.15b shows the vast improvement in vibration reduction that the robust
shapers provide in the presence of modeling errors. In this case the very robust shaper yields essentially
zero vibration, even with the 30% frequency error.
9.2.5 Multi-Mode Input Shaping
Many robotic systems will have more than one flexible mode that can degrade trajectory tracking. There
have been several methods developed for generating input shapers to suppress multiple modes of vibration
[15–18]. These techniques can be used to solve the multiple vibration constraint equations sequentially,
or concurrently. Suppressing multiple modes can lead to a large increase in the number of impulses in the
input shaper, so methods have been developed to limit the impulses to a small number [16]. Furthermore,
the nature of multi-input systems can be exploited to reduce the complexity and duration of a shaper for
a multi-mode system [18].
A simple, yet slightly suboptimal, method is to design an input shaper independently for each mode
of problematic vibration. Then, the individual input shapers can simply be convolved together. This
straightforward process is shown in Figure 9.16.
Copyright © 2005 by CRC Press LLC
9
-12 Robotics and Automation Handbook
0
0.5
1
1.5
012345
ZV
ZVD
Very Robust
Position
Time
(a)
(b)
0
0.5
1
1.5
012345
ZV
ZVD
Position
Time
Very Robust
FIGURE 9.15 Spring-mass response to shaped step commands: (a) Model is perfect; (b) 30% frequency error.
9.2.6 Real-Time Implementation
One of the strengths of command shaping is that it can often be implemented in a real-time control system.
Many command shaping methods can be thought of as filtering the reference signal before it is fed to the
closed-loop control. For example, the input shaping technique requires only a simple convolution that
can usually be implemented with just a few multiplication and addition operations each time through the
control loop.
Many motion control boards and DSP chips have built in algorithms for performing the real-time
convolution that is necessary for input shaping. If these features are not available, then a very simple
algorithm can be added to the control system. The algorithm starts by creating a buffer, just a vector variable
of a finite length. This buffer is used to store the command values for each time step. For example, the first
∗
Mode 2
Input Shaper
Two-Mode
Shaper
Mode 1
Input Shaper
FIGURE 9.16 Forming a two-mode shaper through convolution.
Copyright © 2005 by CRC Press LLC
Trajectory Planning for Flexible Robots 9
-13
∗
1 5 10 15 1 5 10 1515
Send This Value
at Time Step 1
Acquire This Value
at Time Step 1
∗
15
10
15 15
10
1515
Send This Value
at Time Step 8
Acquire This Value
at Time Step 8
Store This Value
for Later
FIGURE 9.17 Real-time input shaping.
value in the buffer would be the shaped command at the first time instance. A graphical representation
of such a buffer is shown in the upper right-hand corner of Figure 9.17. The upper left-hand portion of
the figure shows the unshaped baseline command in the digital domain. This baseline command can be
created in real time, for example, by reading a joystick position.
In order to fill the buffer with the input-shaped command, the algorithm determines the baseline
command each time through the control loop. The algorithm multiplies the value of the baseline command
by the amplitude of the first impulse in the input shaper. This value then gets added to the current time
location in the command buffer. The amplitude of the second impulse is then multiplied by the baseline
command value. However, this value is not sent directly out to the feedback control loop. Rather, it is
added to the future buffer slot that corresponds to the impulse’s location in time. For example, assuming
a 10 Hz sampling rate, if the time location of the second impulse were at 0.5 sec, then this second value
would be added to the buffer five slots ahead of the current position. This real-time process will build up
the shaped command as demonstrated in Figure 9.17. The figure indicates what the value of the shaped
command would be at the first time step and at the eighth time step and how the index to the current
command value advances through the buffer. To avoid having the index exceed the size of the buffer, a
circular buffer is used where the index goes back to the beginning when it reaches the end of the buffer.
9.2.7 Applications
The robustness and ease of use of input shaping has enabledits implementation on a largevarietyof systems.
Shaping has been successfully implemented on a number of cranes and crane-like structures [19–22]. The
performance of both long-reach manipulators [23, 24] and coordinate measuring machines [3, 25, 26]
improves considerably withinput shaping.The multiple modes of a silicon-handling robot wereeliminated
with input shaping [27]. Shaping was an important part of a control system developed for a wafer stepper
[28, 29]. The throughput of a disk-drive-head tester was significantly improved with shaping [8]. A series
of input-shaping experiments was even performed on board the space shuttle Endeavor [13, 30].
Although input shaping may not be specifically designed to optimize a desired trajectory, its ability
to reduce vibration allows the system to track a trajectory without continually oscillating around the
trajectory path. In this respect, input shaping relies on a good baseline command for the desired trajectory.
This trajectory needs to be nominally of the correct shape and needs to account for physical limitations of
the hardware such as workspace boundaries and actuator limits. This baseline trajectory would normally
be derived from these physical and kinematic requirements and this topic is addressed elsewhere.
As a demonstration of input shaping trajectories, consider the painting robot shown in Figure 9.18.
The machine has orthogonal decoupled modes arising from a two-stage beam attached vertically to an
Copyright © 2005 by CRC Press LLC

9
-14 Robotics and Automation Handbook
Air
Brush
Recording
Surface
Compressed Air
Y
X
FIGURE 9.18 Painting robot.
XY positioning stage moving in a horizontal plane. The end effector is a compressed-air paint brush that
paints on paper suspended above the airbrush. The stages are positionedby PD controllers. No information
about the paintbrush position is utilized in the control system. Experiments were conducted by turning
on the flow of air to the paint brush, commencing the desired trajectory, and then shutting off the flow of
paint at the end of the move. Figure 9.19 shows the result when a very fast 3 in. × 3 in. square trajectory
was commanded and input shaping was not used. When input shaping was enabled, the system followed
the desired trajectory much closer, as shown in Figure 9.20.
9.2.8 Extensions Beyond Vibration Reduction
At the core of command generation is usually the desire to eliminate vibration. However, many other
types of performance specifications can also be satisfied by properly constructing the reference command.
Methods for constructing commands that limit actuator effort have been developed [8, 31, 32]. If the
actuator limits are well known and the fastest move times are desired, then command generation can
be used to develop the time-optimal command profiles [33–37]. When the system is Multi-Input Multi-
Output, the shaped commands can be constructed to take this effect into account [18, 31, 38]. When
Desired Response
Direction
of Travel
FIGURE 9.19 Response to unshaped square trajectory.
Copyright © 2005 by CRC Press LLC