Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

The Dynamics of Systems of Interacting Rigid Bodies 7
-11
Thus, if g(t) is a geodesic of the group G, then the equations that describe the rotational motion of a
rigid body are given by
∇
˙
g(t)
˙
g(t) = 0
and these are Euler’s equations for the case that there are no torques applied on the body. Here, ∇ is
the Riemannian connection on the group G, with the Riemannian metric given by the kinetic energy
K =
1
2
˙
g,
˙
g
g
=
1
2
ρ(
˙
g,
˙
g), and ·, ·
g
3
as defined above. In the case that there are external torques applied
on the body, we have to modify the equations. We consider the torques T as 1-forms such that T ∈ T
∗
G.
If we denote the kinetic energy metric by ρ : T
g
G ×T
g
G → IR, then we can write Euler’s equations in the
form
ρ
(∇
˙
g(t)
˙
g(t)) = T
At this point we can further study the rotational dynamics of a rigid body in the case where the body is
constrained to move on a submanifold G
of G. The equations of motion are still going to be geodesics
of the constrained kinetic energy metric. Consider next a submanifold G
of G and let j : G
→ G be
the natural injection. In general, the submanifold G
will not have the property of a subgroup of G.For
example, this would happen if the body was constrained to move in IR
2
. In this case the subgroup is the
one-dimensional subgroup of plane rotations. The same arguments that occur in the case of Newton’slaw
apply here also. Thus if G
is a submanifold of G, it means that the natural injection is an immersion.
Consequently, the Riemannian metric can be pulled back on the submanifold G
using the natural injection
j. We can write the constrained Euler equations on the submanifold G
in the form
¯
ρ
(
¯
∇
˙
¯
g(t)
˙
¯
g(t)) = j
∗
(T)
where
¯
ρ
= j
∗
(ρ
◦ j
∗
) and
¯
g(t) = g(t) |
G
.
¯
∇ denotes the Riemannian connection on the submanifold
G
, induced by the Riemannian metric
¯
ρ. Because we are interested in studying the general case of a rigid
body and the result of the presence of certain constraints, we have to consider the Euclidean manifold
IR
3
× SO(3). In the next example we investigate the representation of Euler’s equations in the form of
geodesics in terms of the coordinates of the group SO(3). This example will illustrate how the arguments
developed up to this point can be applied to this case.
7.5 Example 1: Euler’s Equations for a Rigid Body
Consider a coordinate chart of the Lie group SO(3). We can use as coordinates any convention of the
Euler angles. In this example, we use the Y convention (Goldstein [17]) with φ, θ, ψ as coordinates, where
0 ≤ φ ≤ 2π ,0≤ θ ≤ π,0≤ ψ ≤ 2π . Consider a trajectory g(t) ∈ SO(3) representing the rotational
motion of a rigid body in IR
3
. The coordinates of the trajectory are given by φ(t), θ (t), ψ(t), and thus the
coordinates of the velocity are
˙
g(t) ={
˙
φ(t),
˙
θ(t),
˙
ψ(t)}. The velocity with respect to the body coordinate
system is ω
c
= L
g
−1
∗
˙
g, which when given in matrix form yields
ω
c1
ω
c2
ω
c3
=
−sin(θ ) cos(ψ) cos(ψ)0
sin(θ) sin(ψ) cos(ψ)0
cos(θ)01
˙
φ
˙
θ
˙
ψ
3
The subscript g emphasizes the local character of the metric because the velocities are measured with respect to a
moving coordinate frame.
Copyright © 2005 by CRC Press LLC

7
-12 Robotics and Automation Handbook
With respect to an inertial coordinate frame, the velocity of the body is ω
s
= R
g
−1
∗
˙
g, which when given
in matrix form yields
ω
s1
ω
s2
ω
s3
=
0 −sin(φ) sin(θ) cos(φ)
0 cos(φ) sin(θ ) sin(φ)
1 0 cos(θ)
˙
φ
˙
θ
˙
ψ
The kinetic energy metric is given by K =
1
2
˙
g,
˙
g,
g
=
1
2
ω
c
, ω
c
. We can choose a coordinate frame
attached to the body such that the three axes are the principle axes of the body; thus,
A =
I
1
00
0 I
2
0
00I
3
We can calculate the quantity A
g
= L
∗
g
−1
AL
g
−1
∗
, which when given in matrix form yields
A
g
=
−sin(θ ) cos(ψ) sin(θ ) sin(ψ) cos(θ)
sin(ψ) cos(ψ)0
001
I
1
00
0 I
2
0
00I
3
−sin(θ ) cos(ψ) sin(ψ)0
sin(θ) sin(ψ) cos(ψ)0
cos(θ)01
We can write Euler’s equations in group coordinates using the formula
ρ
(∇
˙
g
˙
g) = T
The complete system of Euler’s equations, using the coordinates given by the three Euler angles, is given
by
¨
φ I
2
sin(ψ)
2
sin(θ)
2
+ 2
˙
φ
˙
ψ I
2
cos(ψ) sin(ψ) sin(θ)
2
− 2
˙
φ
˙
ψ I
1
cos(ψ) sin(ψ) sin(θ)
2
+
¨
φ I
1
cos(ψ)
2
sin(θ)
2
+2
˙
φ
˙
θ I
2
sin(ψ)
2
cos(θ) sin(θ ) +2
˙
φ
˙
θ I
1
cos(ψ)
2
cos(θ) sin(θ ) −2
˙
φ
˙
θ I
3
cos(θ) sin(θ)
−
˙
ψ
˙
θ I
2
sin(ψ)
2
sin(θ) +
˙
ψ
˙
θ I
1
sin(ψ)
2
sin(θ) +
¨
θ I
2
cos(ψ) sin(ψ) sin(θ) −
¨
θ I
1
cos(ψ) sin(ψ) sin(θ)
+
˙
ψ
˙
θ I
2
cos(ψ)
2
sin(θ) −
˙
ψ
˙
θ I
1
cos(ψ)
2
sin(θ) −
˙
ψ
˙
θ I
3
sin(θ) +
¨
φ I
3
cos(θ)
2
+
˙
θ
2
I
2
cos(ψ) sin(ψ) cos(θ) −
˙
θ
2
I
1
cos(ψ) sin(ψ) cos(θ) +
¨
ψ I
3
cos(θ) = T
φ
−
˙
φ
2
I
2
sin(ψ)
2
cos(θ) sin(θ ) −
˙
φ
2
I
1
cos(ψ)
2
cos(θ) sin(θ ) +
˙
φ
2
I
3
cos(θ) sin(θ ) −
˙
φ
˙
ψ I
2
sin(ψ)
2
sin(θ)
+
˙
φ
˙
ψ I
1
sin(ψ)
2
sin(θ) +
¨
φ I
2
cos(ψ) sin(ψ) sin(θ) −
¨
φ I
1
cos(ψ) sin(ψ) sin(θ) +
˙
φ
˙
ψ I
2
cos(ψ)
2
sin(θ)
−
˙
φ
˙
ψ I
1
cos(ψ)
2
sin(θ) +
˙
φ
˙
ψ I
3
sin(θ) +
¨
θ I
1
sin(ψ)
2
− 2
˙
ψ
˙
θ I
2
cos(ψ) sin(ψ)
+2
˙
ψ
˙
θ I
1
cos(ψ) sin(ψ) +
¨
θ I
2
cos(ψ)
2
= T
θ
−
˙
φ
2
I
2
cos(ψ) sin(ψ) sin(θ)
2
+
˙
φ
2
I
1
cos(ψ) sin(ψ) sin(θ)
2
+
˙
φ
˙
θ I
2
sin(ψ)
2
sin(θ) −
˙
φ
˙
θ I
1
sin(ψ)
2
sin(θ)
−
˙
φ
˙
θ I
2
cos(ψ)
2
sin(θ) +
˙
φ
˙
θ I
1
cos(ψ)
2
sin(θ) −
˙
φ
˙
θ I
3
sin(θ) +
¨
φ I
3
cos(θ) +
˙
θ
2
I
2
cos(ψ) sin(ψ)
−
˙
θ
2
I
1
cos(ψ) sin(ψ) +
¨
ψ I
3
= T
ψ
Observe that the torques T are given in terms of the axes of the Euler angles and, thus, cannot be
measured directly. This happens because the axis of rotation for an Euler angle is moving independent of
the body during the motion. This can be circumvented by using the torques around the principle axes,
and then expressing them via an appropriate transformation to torques measured with respect to the axes
Copyright © 2005 by CRC Press LLC
The Dynamics of Systems of Interacting Rigid Bodies 7
-13
of the Euler angles. Because the torques are considered as 1-forms, if we want to translate the torques with
respect to the group coordinates to torques with respect to body coordinates, we have to use a covariant
transformation. The relationship between the corresponding velocities is given by ω
c
= L
g
−1
∗
˙
g, and for
the torques we have T
c
= L
−1
g
−1
∗
T,whereT
c
are the torques with respect to the body coordinate system,
and T are the torques with respect to the group coordinate system. Thus, T can be replaced by (L
∗
g
−1
)
−1
T
c
according to the formula
T
φ
T
θ
T
ψ
=
cos(ψ)
sin(θ)
sin(ψ)
cos(ψ) cos(θ)
sin(θ)
sin(ψ)
sin(θ)
cos(ψ)
−sin(ψ) cos(θ )
sin(θ)
00 1
T
x
T
y
T
z
Up to this point we have investigated the geometric properties of the basic equations of motion of a
rigid body. Next we will use these properties to model multibody systems where we assume that the rigid
bodies interact through point contact or joints. We have used results from some of our previous work
and techniques from Differential Geometry to study the geometric properties of Newton’s and Euler’s
equations. The final goal is to extend the modeling method for dynamical systems introduced by Kron,
which is presented in Hoffmann [20], to interacting mulibody systems.
7.6 The Equations of Motion of a Rigid Body
According to the analysis presented so far, we have derived a representation for the dynamics of a rigid
body which suits our needs. The geodesic representation of the dynamics is the most appropriate to handle
constrained problems. We have described Newton’s and Euler’s equations in their geodesic form on the
manifolds IR
3
and SO(3), respectively, with the Riemannian kinetic energy metrics
σ
(∇
˙
c(t)
˙
c(t)) = F
(7.3)
ρ
(∇
˙
g(t)
˙
g(t)) = T
These metrics can be written in tensor form as E =
1
2
σ
ij
v
i
v
j
and K =
1
2
ρ
ij
u
i
u
j
.WhereE and K are
the translational and the rotational kinetic energies, respectively. Also v
i
, i = 1, 2, 3 are the components
of the velocity
˙
c(t) and u
i
, i = 1, 2, 3 are the components of the velocity
˙
g(t). Next, we want to combine
the two sets of equations in order to treat them geometrically as a unified set of dynamical equations for
a rigid body. The configuration manifold where the position and the orientation of the rigid body in the
Euclidean space are described is IE(3) = IR
3
× SO(3). It is obvious from the analysis so far that we can
use the same process of transforming the translational and rotational dynamics of a rigid body, when the
body is constrained to move on a subset of the configuration space, instead of the total configuration
space. Combining the two sets of dynamics of a rigid body does not affect the geometric properties of
Newton’s and Euler’s equations, as we described them in the previous sections of this chapter. To extend the
reduction process of the dynamics of rigid body motion on the combined configuration manifold IE(3), we
have to introduce a combined kinetic energy metric. More precisely, the sum of the two metrics associated
with the translational and rotational motions is appropriate for a combined kinetic energy metric, i.e.,
E + K =
1
2
σ
ij
v
i
v
j
+
1
2
ρ
ij
u
i
u
j
. We can then define the equations of motion of a free rigid body.
Definition 7.7 The dynamic equations which define the motion of a free rigid body are given by the
equations for a geodesic on the manifold IE(3) with Riemannian metric given by the combined metric
= σ +ρ.
When there are forces and torques acting on the body, then we have to modify the equations of the
geodesics in the form of Equations (7.3). In the case that the body is constrained to move on a subset
M of IE(3), we can describe the dynamics of the body on M under the same conditions we established
in the previous sections for Newton’s and Euler’s equations. Thus, if M is a submanifold of IE(3), then
Copyright © 2005 by CRC Press LLC
7
-14 Robotics and Automation Handbook
we can pull-back the Riemannian metric on M from IE(3) using the natural injection from M to IE(3),
whichisbydefinition an immersion. Actually this is the case that occurs when the rigid bodies interact
through a joint. Depending on the type of joint, we can create a submanifold of IE(3) by considering only
the degrees of freedom allowed by the joint. The other case that we might encounter is when M is a subset
of IE(3), which is also a manifold (with differential structure established independent of the fact that is
a subset ) and there is a map l : M −→ IE(3). This is what happens in the case where the rigid bodies
interact with contact. As we proved in [53], the subset M is also a manifold with a differential structure
established by the fact that M is a submanifold of IE(3) × B. Also we proved in [53] that there exists a map
µ
1
: M −→ IE(3). In the case that this map is an immersion, we can describe the dynamics of the rigid
body on M.
According to our assumptions about the point interaction between rigid bodies, joints and contact are
the two types of interactions that are being considered. Our intention is to develop a general model for the
dynamics of a set of rigid interacting bodies; therefore, both cases of contact and joint interaction might
appear simultaneously in a system of equations describing the dynamics of each rigid body in the rigid
body system. Thus we will consider the more general case where the dynamics are constrained to a subset
M of IE(3), which is a manifold, and that there exists a map l : M −→ IE(3) which is an immersion. We can
use as before the pull-back l
∗
: T
∗
IE(3) −→ T
∗
M to induce a metric on M. If we denote the Riemannian
metric on IE(3) by = σ + ρ, then the induced Riemannian metric on M is
¯
= l
∗
. Consider next a
trajectory on IE(3), r (t):(c(t), g (t)). If this curve is a solution for the dynamics of a rigid body, it satisfies
Equations (7.3) which can be written in condensed form
(∇
˙
r (t)
˙
r (t)) = F + T
(7.4)
The term ∇
˙
r (t)
˙
r (t) has the same form as the RHS of the geodesic equations and depends only on the
corresponding Riemannian metric . When we describe the dynamics on the manifold M, with the
induced Riemannian metric
¯
, the corresponding curve
¯
r (t) ∈ M should satisfy the following equations:
¯
(
¯
∇
˙
¯
r (t)
˙
¯
r (t)) = l
∗
(F + T)
(7.5)
where F +T is the combined 1-form of the forces and the torques applied to the unconstrained body. The
term
¯
∇
˙
¯
r (t)
˙
¯
r (t) is again the same as the RHS of the equations for a geodesic curve on M and depends only
on the induced Riemannian metric
¯
. Thus in general, the resulting curve
¯
r (t) ∈ M will not be related
to the solution of the unconstrained dynamics except in the case where M is a submanifold of IE(3), and
in this case we have
¯
r (t) = r (t) |
M
. It is natural to conclude that the 1-form l
∗
(F + T) includes all forces
and torques that allow the rigid body to move on the constraint manifold M. In the initial configuration
space IE(3), the RHS of the dynamic equations includes all the forces and torques that make the body
move on the subset M of IE(3); these are sometimes referred to as “generalized constraint forces.” Let F
M
and T
M
denote, respectively, these forces and torques. We can separate the forces and torques into two
mutually exclusive sets, one set consisting of the forces and torques that constrain the rigid body motion
on M and the other set of the remaining forces and torques which we denote by F
S
, T
S
.Thuswehave
F + T = (F
M
+ T
M
) ⊕ (F
S
+ T
S
). We can define a priori the generalized constraint forces as those that
satisfy the condition
l
∗
(F
M
+ T
M
) = 0 (7.6)
This is actually what B. Hoffmann described in his work [20] as Kron’s method of subspaces. Indeed in this
work Kron’s ideas about the use of tensor mathematics in circuit analysis are applied to mechanical systems.
As Hoffman writes, Kron himself gave some examples of the application of his method in mechanical
systems in an unpublished manuscript. In this chapter we actually develop a methodology within Kron’s
framework, using the covariant derivative, for the modeling of multibody systems. From the analysis that
we have presented thus far it appears as if this is necessary in order to include not only joints between the
bodies of the system but also point contact interaction.
Copyright © 2005 by CRC Press LLC
The Dynamics of Systems of Interacting Rigid Bodies 7
-15
7.7 Constraint Forces and Torques between Interacting Bodies
Because one of the main objectives is to develop dynamic models of multibody systems suitable for control
studies, our first task is to investigate some of the ways in which rigid bobies can interact. By interaction
between rigid bodies here we do not mean dynamic interaction in the sense of gravity. Instead, we mean
kinematic interaction through points on the surfaces of the rigid bodies. More precisely, in this work we
say that two rigid bodies are interacting when for a given position of the rigid bodies, the set of points
belonging to the surface of one rigid body coincides with a set of points belonging to the surface of another
rigid body. To put this definition in a dynamic context, we can say that if γ
1
(t) and γ
2
(t) are two curves
in IE(3) describing the motion of two rigid bodies in IR
3
, then we have interaction if at least two points of
these two curves coincide for some instant of time t = t
0
. In our construction we restrict the modeling of
interaction by introducing the following assumptions:
1. There is only one point on each body that coincides with one point on the other body at any instant
of time.
2. During the motion of the interacting bodies, there is a nonempty interval of time with positive
measure for which interaction occurs.
3. The interaction points follow continuous paths on the surfaces of the interacting bodies.
The second condition avoids impulsive interaction, which requires special investigation. The third con-
dition is necessary to avoid cases where the interaction might be interrupted for some time and then
continue again. In this later case our model fails unless special care is taken to include such transitions in
the modeling. With these three assumptions for the interaction between rigid bodies, the possible types
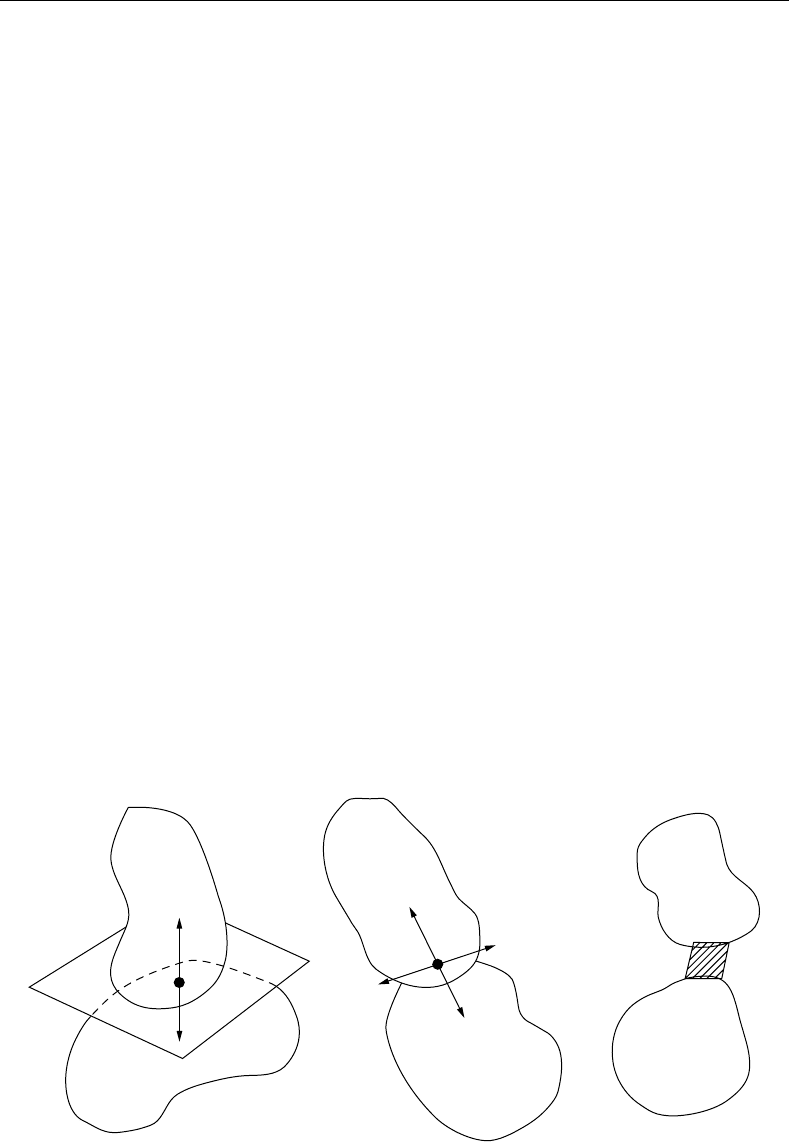
of interaction are illustrated in Figure 7.3.
Precisely the possible interactions include contact, joint connection, and rigid connection. The last case
is of no interest because the two bodies behave dynamically as one. In the other two cases, the interaction
results in a kinematic constraint for one of the bodies. We can replace this constraint in the study of
dynamics with a force acting on each body. In the case of a joint between the interacting bodies, the
constraint can be replaced by forces of equal and opposite signs acting on each body. The direction of
the force is not specified, see Figure 7.3. In the case of contact, the constraint is replaced by a force in the
direction vertical to the common tangent plane at the point of contact. Forces can act in the tangential
direction, but they have nothing to do with the constraint; they are friction forces. In both cases the forces
are such that the constraints are satisfied. This is an a priori consideration for the constraints. In this way,
FIGURE 7.3 Possible types of interaction.
Copyright © 2005 by CRC Press LLC
7
-16 Robotics and Automation Handbook
a constraint resulting from the interaction between two rigid bodies can be replaced by certain forces that
act on the unconstrained bodies. The type of forces depends on the type of constraints. To make this point
more clear, we present several examples.
7.8 Example 2: Double Pendulum in the Plane
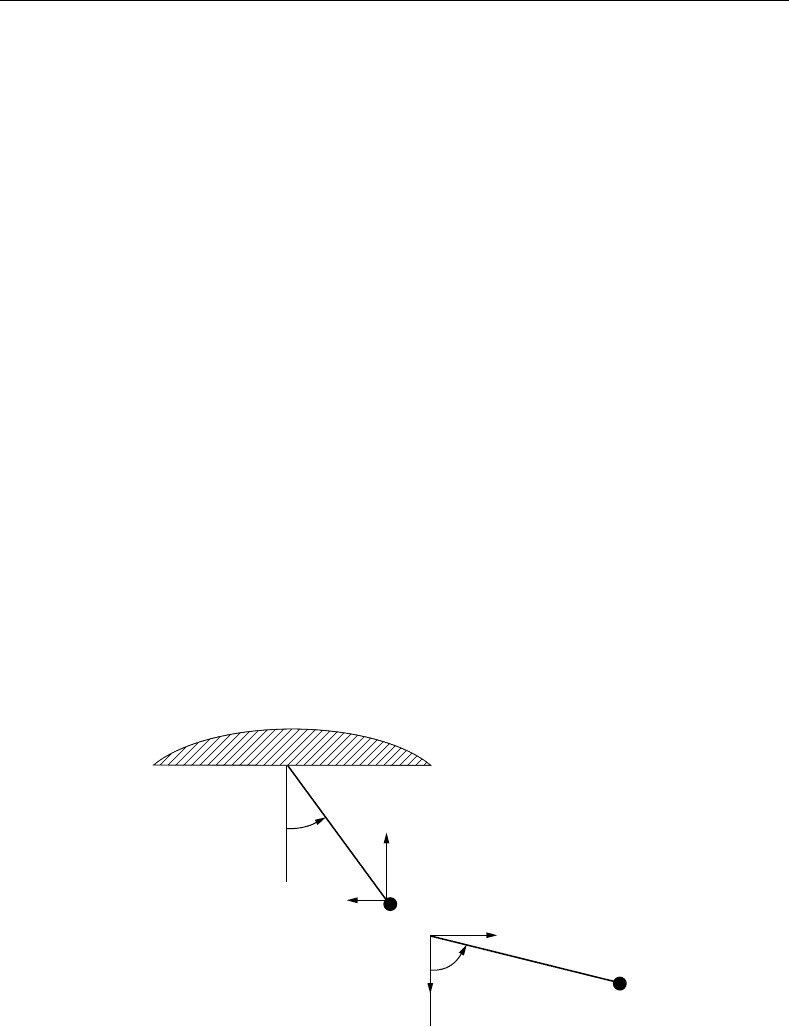
In this example we will develop a model for the double pendulum with masses concentrated at the ends
of the links. We regard initially each body separately (Figure 7.4). Thus, the first link has one degree of
freedom θ, and the second has three degrees of freedom {φ, x, y}. For the second body (link) x, y are the
coordinates of the center of the mass attached to the end of the link, and φ is the rotational degree of
freedom of the link of the second body. The joint between the two links acts as a constraint imposed on
the second link that is kinematically expressed by
x =l
1
sin(θ) +l
2
sin(φ)
y =−l
1
cos(θ) −l
2
cos(φ)
Thus, in order that the point at one end of the second link always coincides with the point P of the other
link, a force with components F
x
, F
y
is required to act on the unconstrained second link. These forces are
exerted by the tip of the first link, and there is an equal but opposite force −F
x
, −F
y
acting on the first link.
We could have considered the first body as a free body in two dimensions constrained by the first joint,
but this does not provide any additional insight for the double pendulum problem. We can separate the
rotational and the translational equations of motion for the system consisting of the two bodies in the form
ρ
(∇
˙
r (t)
˙
r (t)) = F + T
In our case
ρ =
m
1
l
2
1
00 0
0000
00m
2
0
000m
2
q
f
–F
x
–F
y
F
y
F
x
(x, y)
FIGURE 7.4 Double pendulum and associated interaction forces.
Copyright © 2005 by CRC Press LLC

The Dynamics of Systems of Interacting Rigid Bodies 7
-17
The degrees of freedom of the system are θ, φ, x and y, and the matrix expression for ∇
˙
r (t)
˙
r (t)is
¨
θ
¨
φ
¨
x
¨
y
The matrix expression of the 1-form of the forces and the torques F + T is
F + T =
−m
1
l
1
g sin(θ) − F
x
l
1
cos(θ) + F
y
l
1
sin(θ)
−F
x
l
2
cos(φ) + F
y
l
2
sin(φ)
F
x
−F
y
− m
2
g
At this point we have described the equations of motion for the two free bodies that make up the system.
Next we proceed with the reduction of the model according to the methodology described above. The
degrees of freedom of the constrained system are
˜
θ,
˜
φ, and we can construct the map ξ according to
ξ : {
˜
θ,
˜
φ}−→{
˜
θ,
˜
φ, l
1
sin(
˜
θ) +l
2
sin(
˜
φ), −l
1
cos(
˜
θ) −l
2
cos(
˜
φ)}
Next ξ
∗
is calculated:
ξ
∗
=
10
01
l
1
cos(
˜
θ) l
2
cos(
˜
φ)
l
1
sin(
˜
θ) l
2
sin(
˜
φ)
It is obvious that the map ξ is an immersion, because the rank(ξ
∗
) = 2. Consequently, we compute
¯
ρ = ξ
∗
ρ:
¯
ρ =
l
2
1
m
1
+l
2
1
m
2
l
1
l
2
m
2
cos(
˜
θ −
˜
φ)
l
1
l
2
m
2
cos(
˜
θ −
˜
φ) l
2
2
m
2
Applying ξ
∗
on the 1-forms of the forces and the torques on the RHS of the dynamic equations of motion
we obtain
ξ
∗
(F + T) =
−m
1
l
1
gsin(
˜
θ) −l
1
m
2
gsin(
˜
θ)
−l
2
m
2
gsin(
˜
φ)
We observe that all the reaction forces have disappeared from the model because we are on the constrained
submanifold. Thus, we could have neglected them in the initial free body modeling scheme. We continue
with the calculation of
¯
∇
˙
¯
r (t)
˙
¯
r (t), which defines a geodesic on the constraint manifold. The general form
of the geodesic is [12,14]
d
2
x
i
dt
2
+
i
jk
dx
j
dt
dx
k
dt
Copyright © 2005 by CRC Press LLC
7
-18 Robotics and Automation Handbook
where x
i
are the degrees of freedom of the constrained manifold and
i
jk
are the Christoffel symbols. We
have that
1
12
= 0
2
12
= 0
1
11
=
l
2
1
l
2
2
m
2
2
cos(
˜
θ −
˜
φ) sin(
˜
θ −
˜
φ)
l
2
1
l
2
2
m
1
m
2
+l
2
1
l
2
2
m
2
2
−l
2
1
l
2
2
m
2
2
cos(
˜
θ −
˜
φ)
2
2
11
=
l
1
l
2
m
2
(l
2
1
m
1
+l
2
1
m
2
) sin(
˜
θ −
˜
φ)
l
2
1
l
2
2
m
1
m
2
+l
2
1
l
2
2
m
2
2
−l
2
1
l
2
2
m
2
2
cos(
˜
θ −
˜
φ)
2
1
22
=
l
1
l
3
2
m
3
2
sin(
˜
θ −
˜
φ)
l
2
1
l
2
2
m
1
m
2
+l
2
1
l
2
2
m
2
2
−l
2
1
l
2
2
m
2
2
cos(
˜
θ −
˜
φ)
2
2
22
=
l
2
1
l
2
2
m
2
2
cos(
˜
θ −
˜
φ) sin(
˜
θ −
˜
φ)
l
2
1
l
2
2
m
1
m
2
+l
2
1
l
2
2
m
2
2
−l
2
1
l
2
2
m
2
2
cos(
˜
θ −
˜
φ)
2
d
2
x
i
dt
2
+
i
jk
dx
j
dt
dx
k
dt
=
¨
˜
θ +2
1
11
˙
˜
θ
2
+ 2
2
11
˙
˜
φ
2
¨
˜
φ + 2
1
22
˙
˜
θ
2
+ 2
2
22
˙
˜
φ
2
We apply
¯
ρ
in the form of a matrix operating on
¯
∇
˙
¯
r (t)
˙
¯
r (t), and equating the result with ξ
∗
(F + T) yields
the following equations of motion:
(m
1
+ m
2
)l
2
1
¨
˜
θ +m
2
l
1
l
2
cos(
˜
θ −
˜
φ)
¨
˜
φ +l
1
l
2
m
2
sin(
˜
θ −φ)
˙
φ
2
m
2
l
2
2
¨
˜
φ + m
2
l
1
l
2
cos(
˜
θ −
˜
φ)
¨
˜
θ −m
2
l
1
l
2
sin(
˜
θ −
˜
φ)
˙
˜
θ
2
=
−m
1
gl
1
sin(
˜
θ) − m
2
gl
1
sin(
˜
θ)
m
2
gl
2
sin(
˜
φ)
which are exactly the equations that are obtained using the classical Lagrangian formulation [41].
7.9 Including Forces from Friction and from
Nonholonomic Constraints
Friction forces,and the resulting torques, can be added naturally within the modeling formalism presented.
Frictional forces are introduced when a body moves in contact with a nonideal surface and the friction
forces have a direction which opposes the motion. There is a significant literature on the subject of friction,
which actually constitutes the separate scientific field of triboblogy. What is important for our formulation
is that the direction of the friction forces is opposite to the direction of the motion. Modeling of the friction
forces is also a complicated subject and depends on additional information about the nature of contacting
surfaces. The magnitude of the friction forces can depend on the velocity or the square power of the
velocity [3], for example. At this point we will not investigate the inclusion of friction forces and torques as
functions of the velocities and other parameters. Because a complete model requires this information, we
will leave this matter for future investigation. Nonholonomic constraints are a special case of constraints
that appear in a certain class of problems in dynamics. These constraints are not integrable (e.g., rolling)
and can be represented as 1-forms. Integrability is a property defined for a set of equations describing
kinematic constraints with the general form J (q)dq = 0 (1-forms), where J (q)isn × (n − m) matrix
with rank equal to (n − m). If the initial dynamic system can be described on a n-dimensional manifold
M, then the constraint equation J (q)dq = 0 is said to be integrable on M if there exists a smooth (n −m)-
dimensional foliation whose leaves are (n −m)-dimensional submanifolds with all of their points tangent
to the planes defined by the constraint equations [4]. Alternatively, integrability of the constraints can be
defined with respect to the associated vector fields, vanishing when the 1-forms of constraints operate on
them. In this context integrability of the vanishing vector fields is defined by the Frobenious theorem [12].
Copyright © 2005 by CRC Press LLC

The Dynamics of Systems of Interacting Rigid Bodies 7
-19
From the existing literature it is obvious that these types of constraints are more difficult to deal with
and a lot of attention is required in their use. Many times they lead to falacies [41] and they have been
the cause of many discussions. It has also been shown that using the nonholonomic constraints with
different variational principles (D’ Alembert, Hamilton, etc.) can lead to different solutions (Vakonomic
mechanics [22–25]). In our formalism we deal with elementary (not generalized) entities like forces and
torques applied on each body. Initially it appears as if there is no better way to introduce a force or a
torque from a nonholonomic constraint in any modeling formalism. The forces and the torques from a
nonholonomic constraint are frictional, but they produce no work. The virtual work produced by these
forces and torques is of third order (δx
3
) in the related displacement [18], and these forces and torques
are acting on the body to keep the constraint valid. This is equivalent to requiring that the forces and the
torques act in the direction of the 1-form representing the nonholonomic constraint (Burke [14]). This
interpretation allows the introduction of Lagrange multipliers in a nonvariational framework, and a force
or torque in the direction of the 1-form ω should be of the form F = λω.
Next, consider a procedure where the objective is to model the dynamics of a set of interacting bodies.
We begin by considering each body separately and all the forces and torques that are acting on the body,
including applied and reaction forces and torques. Then, because of the existence of constraints, each body
is actually moving on a submanifold of the original configuration space defined by a natural injection j .
The resulting forces and torquesare, as we pointed out earlier, l
∗
(F +T). The constraint forces and torques
disappear from the dynamics on the resulting submanifold because l
∗
(F
M
+T
M
) = 0. Thus, in considering
the dynamics on the submanifold, we should not include the torques and forces that result because of the
constraints at the initial stage of the modeling. What is important, though, is being able to distinguish
between constraint forces and torques and the other exerted forces and torques caused from friction, for
example. These other exerted forces and torques do have an effect on the dynamics on the submanifold. In
the case of contact between two bodies for example, friction forces can be introduced in the direction of
the common tangent plane. In the reduction process of the initial configuration space, this friction force
will remain present. The effect of these types of forces can dramatically alter the behavior of a rigid body,
producing interesting phenomena; for example, in the case of contact interaction, they can cause rolling
phenomenon. To control a system using a model that includes these types of forces and torques, we need to
introduce them as measurable quantities in the model. Certain assumptions can be used a priori for special
cases, like pure sliding motion. However, there are other situations where the cause of a change from one
type of motion to another, with little or no a priori information about the frictional forces and torques,
is unknown. Neglecting information on how the forces and torques can affect the qualitative properties
of the motion can be disastrous from a modeling perspective. On the other hand, trying to describe the
dynamics using principles like the D’Alembert-Lagrange or Hamiltonian formulations can result in an
ambiguous model, as in the case of nonholonomic constraints, see, for example [4,22–25]. Next we present
a systematic procedure for modelling the dynamics of a set of interacting bodies using the configuration
space reduction method. This is done in the context of the above discussion, regarding the forces and the
torques that are involved as a result of the interaction. Several examples are used to illustrate the approach.
7.10 Example 3: The Dynamics of the Interaction
of a Disk and a Link
The constrained configuration space of the disk is M
1
, a two-dimensional submanifold of IE(3) × B
1
.Let
B
1
denote the surface of the disk and let B
2
denote the surface of the link. The coordinates of IE(2) × B
1
are {z
1
, z
2
, θ, φ}, and for the submanifold they are {
˜
z
1
,
˜
θ}. In a similar way the constrained configuration
space of the link is M
2
, a two-dimensional submanifold of IE(2) × B
2
. The coordinates of M
2
are {
˜
y
1
,
˜
θ
2
}
and for IE(2) × B
2
they are {y
1
, y
2
, θ
2
, τ
1
}.
The modeling methodology requires deriving Newton’s and Euler’s equations for each body separately,
with the external and the reaction forces and torques included as shown in Figure 7.5. At this point, we
Copyright © 2005 by CRC Press LLC

7
-20 Robotics and Automation Handbook
(y
1
, y
2
)
(z
1
, z
2
)
v
–v
B
u
t
1
FIGURE 7.5 Disk in contact with a link.
assume that there are no friction forces generated by the contact. The set of the dynamic equations is
m
¨
z
1
=−vsin(θ
2
)
m
¨
z
2
= u − vcos(θ
2
) −mg
I
¨
θ =0
m
2
¨
y
1
= vsin(θ
2
)
m
2
¨
y
2
= vcos(θ
2
) −m
2
g
I
2
¨
θ
2
= u
2
− vτ
1
Where m, I are the mass and the moment of inertia of the disk, m
2
, I
2
are the mass and the moment
of inertia of the link, and u
2
is the input (applied) torque. As we mentioned previously, the dynamic
equations that describe the motion for each body are described initially on IE(2). The torques and the
forces are 1-forms in T
∗
IE(2). The dynamic equations of the combined system are defined on IE(2) ×IE(2),
but the constrained system actually evolves on M
1
× M
2
. We can restrict the original system of dynamic
equations to M
1
× M
2
using the projection method developed earlier. Thus we need to construct the
projection function ξ : M
1
× M
2
−→ IE(2) × IE(2). We already have a description of the projection
mappings for each constrained submanifold, µ
1
: M
1
−→ IE(2) and ν
1
: M
2
−→ IE(2). We can use
the combined projection function ξ = (µ
1
, ν
1
) for the projection method. As stated previously, the
forces and torques are 1-forms in T
∗
IE(2), and for the link, for example, they should have the form
a(y
1
, y
2
, θ
2
)dy
1
+b(y
1
, y
2
, θ
2
)dy
2
+c(y
1
, y
2
, θ
2
)dθ
2
. However, in the equations for the 1-forms we have the
variables τ
1
and u
2
, which are different from {y
1
, y
2
, θ
2
}. The variable u
2
is the input (torque) to the link,
and τ
1
is the point of interaction between the link and the disk. Thus τ
1
can be viewed as another input
to the link system. In other words, when we have contact between objects, the surfaces of the objects in
contact must be included in the input space. When we project the dynamics on the constraint submanifold
M
2
, then τ
1
is assigned a special value because in M
2
, τ
1
is a function of {
˜
y
1
,
˜
θ
2
} (the coordinates of M
2
).
We can compute the quantities ξ
∗
and ξ
∗
that are needed for the modeling process. The projection map ξ
is defined as
ξ : {
˜
z
1
,
˜
θ,
˜
y
1
,
˜
θ
2
}−→
˜
z
1
,1,
˜
θ,
˜
y
1
,
1 +sin(θ
2
)(
˜
z
1
−
˜
y
1
)
cos(
˜
θ
2
)
+ 1,
˜
θ
2
Copyright © 2005 by CRC Press LLC