Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.


7
The Dynamics of
Systems of Interacting
Rigid Bodies
Kenneth A. Loparo
Case Western Reserve University
Ioannis S. Vakalis
Institute for the Protection and Security of
the Citizen (IPSC) European Commission
7.1 Introduction
7.2 Newton’s Law and the Covariant Derivative
7.3 Newton’s Law in a Constrained Space
7.4 Euler’s Equations and the Covariant Derivative
7.5 Example 1: Euler’s Equations for a Rigid Body
7.6 The Equations of Motion of a Rigid Body
7.7 Constraint Forces and Torques between
Interacting Bodies
7.8 Example 2: Double Pendulum in the Plane
7.9 Including Forces from Friction and from
Nonholonomic Constraints
7.10 Example 3: The Dynamics of the Interaction
of a Disk and a Link
7.11 Example 4: Including Friction in the Dynamics
7.12 Conclusions
7.1 Introduction
In this chapter, we begin by examining the dynamics of rigid bodies that interact with other moving or
stationary rigid bodies. All the bodies are components of a multibody system and are allowed to have
a single point of interaction that can be realized through contact or some type of joint constraint. The
kinematics for the case of point contact has been formulated in previous works [52–54]. On the other
hand, the case of joint constraints can be easily handled because the type of joint clearly defines the de-
grees of freedom that are allowed for the rigid bodies that are connected through the joint. Then we will
introduce a methodology for the description of the dynamics of a rigid body generally constrained by
points of interaction. Our approach is to use the geometric properties of Newton’s equations and Euler’s
equations to accomplish this objective. The methodology is developed in two parts, we first investigate
the geometric properties of the basic equations of motion of a rigid body. Next we consider a multibody
system that includes point interaction that can occur through contact or some type of joint constraint.
Each body is considered initially as an independent unit and forces and torques are applied to the bodies
through the interaction points. There is a classification of the applied forces with respect to their type
Copyright © 2005 by CRC Press LLC

7
-2 Robotics and Automation Handbook
(e.g., constraint, friction, external). From the independent dynamic equations of motion for each body we
can derive a reduced model of the overall system, exploiting the geometric properties of the physical laws.
The framework that is developed can also be used to solve control problems in a variety of settings. For
example, in addition to each point contact constraint, we can impose holonomic and/or nonholonomic
constraints on individual bodies. Holonomic and nonholonomic constraints have been studied extensively
in the areas of mechanics and dynamics, see, for example [4,37]. Holonomic control problems have been
studied recently in the context of robotics and manipulation, for example [33,34]. On the other hand,
nonholonomic control problems, which are more difficult to solve, have recently attracted the attention of
a number of researchers and an extensive published literature is developing. Specific classes of problems
have been studied, such as mechanical systems sliding or rolling in the plane, see, for example [9–11].
Another category of nonholonomic control problems deals with mobile robots and wheeled vehicles,
for example [7,8,15,28–31,36,42–48,50,51]. Spacecrafts and space robots are a further class of mechan-
ical systems with holonomic constraints. The reason for this characterization is the existence of certain
model symmetries that correspond to conserved quantities. If these quantities are not integrable, then
we have a nonholonomic problem. A number of works have been published in this area, see, for exam-
ple [16,21,26,35,38,49,55], and the literature in this area is still developing. Important techniques based on
the concept of geometric phases have also been developed for the solution of holonomic control problems
[9,19,27,32,38–40].
7.2 Newton’s Law and the Covariant Derivative
Application of Newton’s law is a very familiar technique for determining the equations of motion for an
object or a particle in three space (IR
3
). The fact that we use Newton’slawinIR
3
, which has some nice
geometric properties, disguises the intrinsic geometric aspects of the law. A geometric interpretation of
Newton’s law becomes apparent when we use it in cases where the object or the particle is constrained to
move on a subset Q, or a submanifold M,inIR
3
. As we have seen from some of our previous work [53],
such submanifolds result when the object is confined to move in contact with other surfaces in IR
3
, which
can be stationary or moving (other objects). Whenever an object is in contact with a surface in IR
3
then
we have “reaction” forces as a result of the contact, and three reaction forces are applied to the object and
on the surface. These forces in the classical formulation are vectors vertical to the common tangent plane
between the objects or the object and the surface at the point of contact, and it is necessary to distinguish
these forces from the friction forces that are introduced tangent to the contacting surfaces. The “reaction”
forcesareintroducedinNewton’s formulation of the equations of motion because the object is constrained
to move on a given surface. We begin our development by considering the original form of Newton’slawin
IR
3
. Assume that there is an object moving in IR
3
, then Newton’s law states that the acceleration multiplied
by the mass of the object is equal to the applied forces on the object. We can elaborate more on this simple
form of the law so that its geometric aspects become more obvious. This can be done using concepts from
Riemannian geometry in IR
3
. The kinetic energy metric in IR
3
, which when expressed in local coordinates
is given by E =
1
2
σ
ij
v
i
v
j
.
1
The kinetic energy metric gives a Riemannian structure to IR
3
, denoted by
·, · : TIR
3
× TIR
3
−→ IR and E =
1
2
σ
ij
v
i
v
j
=
1
2
v
i
, v
j
Definition 7.1 A Riemannian structure on a manifold N is a covariant tensor k of type T
0
2
(N). The
covariant tensor k : TN × TN −→ IR, is nondegenerate and positive definite.
Nondegenerate and positive definite mean that k(v
m
, v
m
) > 0, ∀v
m
∈ T
m
N when v
m
= 0. In this
chapter we will consider only positive definite Riemannian metrics. Some of the following definitions
and theorems are also valid for pseudo-Riemannian metrics [1]. The Riemannian structure is important
because later in the development we will need to induce a metric from one manifold to another manifold
1
Tensor notation requires superscripts for coordinates instead of subscripts.
Copyright © 2005 by CRC Press LLC
The Dynamics of Systems of Interacting Rigid Bodies 7
-3
through an immersion. This requires a positive definite Riemannian metric on the first manifold and the
extension to a pseudo-Riemannian metric requires further investigation and will not be discussed here.
In order to establish a geometric form for the acceleration component of Newton’slaw,weneedtoin-
troduce the notion of a connection on a general Riemannian manifold. The connection is used to describe
the acceleration along curves in more general spaces like a Riemannian manifold, see Boothby [12].
Definition 7.2 A C
∞
connection ∇ on a manifold N is a mapping ∇ : X(N) × X(N) −→ X(N)
defined by ∇(X, Y) −→ ∇
X
Y,∇ satisfies the linearity properties for all C
∞
functions f, g on N and
X, X
, Y, Y
∈ X(N):
1. ∇
fX+gX
Y = f (∇
X
Y) + g (∇
X
Y)
2. ∇
X
( fY+ gY
) = f ∇
X
Y + g∇
X
Y
+ (Xf)Y + (Xg)Y
Here, X(M) denotes the set of C
∞
vector fields on the manifold M.
Definition 7.3 A connection on a Riemannian manifold N is called a Riemannian connection if it has
the additional properties:
1. [X, Y ] =∇
X
Y −∇
Y
X
2. XY, Y
=∇
X
Y, Y
+Y, ∇
X
Y
Here, [·, ·] denotes the Lie bracket.
Theorem 7.1 If N is a Riemannian manifold, then there exists a uniquely determined Riemannian con-
nection on N.
A comprehensive proof of this theorem can be found in W.M. Boothby [12]. The acceleration along a
curve c(t) ∈ N is given by the connection ∇
˙
c(t)
˙
c(t). In this context the Riemannian connection denotes
the derivative of a vector field along the direction of another vector field, at a point m ∈ N.
To understand how the covariant derivative, defined on a submanifold M of IR
n
, leads to the abstract
notion of a connection, we need to introduce the derivative of a vector field along a curve in IR
n
. Consider a
vector field X definedonIR
n
and a curve c(t) ∈ IR
n
.LetX(t) = X |
c(t)
, then the derivative of X(t) denoted
by
˙
X(t) is the rate of change of the vector field X along this curve. Consider a point c(t
0
) = p ∈ IR
n
and the vectors X(t
0
) ∈ T
c(t
0
)
IR
n
and X(t
0
+ t) ∈ T
c(t
0
+t)
IR
n
. We can use the natural identification of
T
c(t
0
)
IR
n
with T
c(t
0
+t)
IR
n
, and the difference X(t
0
+t) − X(t
0
) can be defined in T
c(t
0
)
IR
n
. Consequently,
the derivative
˙
X(t
0
) can be defined by
˙
X(t
0
) = lim
t→0
X(t
0
+ t) − X(t
0
)
t
Consider a submanifold M imbedded in IR
n
, and a vector field X on M, not necessarily tangent to M.
Then, the derivative of X along a curve c(t) ∈ M is denoted by
˙
X(t) ∈ T
c(t)
IR
n
.Atapointc(t
0
) = p ∈ M,
the tangent space T
p
IR
n
can be decomposed into two mutually exclusive subspaces T
p
IR
n
= T
p
M ⊕T
p
M
⊥
.
Consider the projection p
1
: T
p
IR
n
−→ T
p
M, the covariant derivative of X along c(t) ∈ M is defined as
follows:
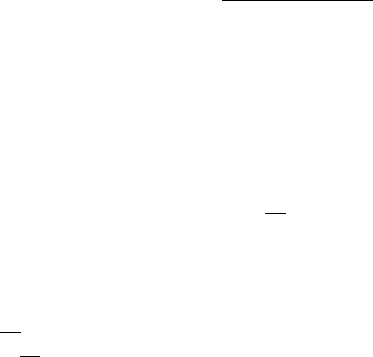
Definition 7.4 The covariant derivative of a vector field X on a submanifold M of IR
n
along a curve
c(t) ∈ M is the projection p
1
(
˙
X(t)) and is denoted by
DX
dt
.
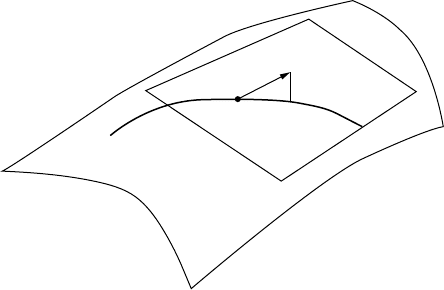
An illustration of the covariant derivative is given in Figure 7.1. The covariant derivative gives rise to
the notion of a connection through the following construction: Consider a curve c(t) ∈ M, the point
p = c(t
0
),and the tangentvectortothe curve X
p
=
˙
c(t
0
)atp. We can definethe map ∇
X
p
: T
p
M −→ T
p
M
by ∇
X
p
Y : X
p
−→
DY
dt
|
t=t
0
, along any curve c(t) ∈ M such that
˙
c(t
0
) = X
p
and Y ∈ M. Along the curve
c(t)wehave∇
˙
c(t)
Y =
DY
dt
. The connection can be defined as a map ∇ : X(M)×X(M) −→ X(M), where
Copyright © 2005 by CRC Press LLC
7
-4 Robotics and Automation Handbook
X(t)
c(t)
c(t
o
)
X(t
o
+ ∆t)
DX
dt
FIGURE 7.1 The covariant derivative of a vector field X.
∇ :(X, Y ) −→ ∇
X
Y. In a general Riemannian manifold, the connection is defined first and then the
covariant derivative is introduced by
DY
dt
=∇
˙
c(t)
Y. In general, the acceleration on a Riemannian manifold
N, along a path c(t), is given by
∇
˙
c(t)
˙
c(t)
It then follows that the equation for a geodesic curve is given by ∇
˙
c(t)
˙
c(t) = 0.
Consider now a curve c : I −→ IR
3
, which represents the motion of a body or a particle in IR
3
.
Computing the acceleration of the body along this curve provides only one part of the expression needed
for Newton’s law. Because IR
3
is a Riemannian manifold, the acceleration along a curve is given by the
connection ∇
˙
c(t)
˙
c(t) ∈ TIR
3
.
Consequently, we need to examine the geometric properties of the forces applied to the object. As
mentioned previously, the forces in the classical approach are considered as vectors in IR
3
, but this is not
sufficient for a geometric interpretation of Newton’s law. Geometrically the forces are considered to be
1-forms on the cotangent space associated with the state space of the object, which in our case is T
∗
IR
3
.
The main reason that the forces are considered to be 1-forms is because of the concept of “work.” Actually,
the work done by the forces along c(t) is given by the integral of the 1-forms representing the forces that
are acting along c(t).
Although we have provided a geometric interpretation for the acceleration and the forces, there is still a
missing link because the acceleration is a vector field on the tangent space TIR
3
and the forces are 1-forms
on the cotangent space T
∗
IR
3
. Thus, we cannot just multiply the acceleration by the mass and equate the
product with the forces. The missing link is provided by the kinetic energy metric, using its properties
as a covariant tensor. More specifically, if we consider a covariant tensor k on a manifold N of the type
T
0
2
(N), then there is a map associated with the tensor called the flat map of k (refer to R. Abraham and
J.E. Marsden [1] for more details). Let k
denote the flat map, defined by
∀v ∈ TN k
(v) = k(v, ·) and k
: TN −→ T
∗
N
thus k
(v) is a 1-form on T
∗
N. Consider the kinetic energytensor E =
1
2
σ (u, u)onIR
3
, then σ
: TIR
3
−→
T
∗
IR
3
and ∀v ∈ TIR
3
, σ
(v)isa1-forminT
∗
IR
3
.
If we let the flat map of the kinetic energy tensor σ
act on the covariant derivative ∇
˙
c(t)
˙
c(t), we obtain
a 1-form in T
∗
IR
3
. The geometric form of Newton’s law is then given by
σ
(∇
˙
c(t)
˙
c(t)) = F
(7.1)
where F denotes the 1-forms corresponding to the forces applied on the body.
Copyright © 2005 by CRC Press LLC

The Dynamics of Systems of Interacting Rigid Bodies 7
-5
If the body is constrained to move on a submanifold M of IR
3
, the state space of the object is no longer
IR
3
but the submanifold M of IR
3
.
7.3 Newton’s Law in a Constrained Space
Next, we need to examine how to describe the dynamics of the constrained object on the submanifold
M, instead of IR
3
.Morespecifically we want to find a description of Newton’s law on the constrained
submanifold M, to develop dynamic models for systems of interacting rigid bodies, with the ultimate
objective of developing control strategies for this class of systems. In order to constrain the dynamic
equation σ
(∇
˙
c(t)
˙
c(t)) = F on the submanifold M, we must constrain the different quantities involved
in Newton’s law; we begin with the restriction of the kinetic energy tensor σ to M.
Consider a smooth map f : N −→ N
,whereN, N
are C
∞
manifolds. Let T
0
k
(N
) denote the set of
covariant tensors of order k on N
. Then if ∈ T
0
k
(N
), we can define a tensor on N in the following way:
f
∗
: T
0
k
(N
) −→ T
0
k
(N)
( f
∗
)
p
(u
1
, ..., u
k
) =
f (p)
( f
∗
u
1
, ..., f
∗
u
k
)
where
u
i
∈ T
p
Ni= 1, ..., k and f
∗p
: T
p
N −→ T
f (p)
N
denotes the derived map of f . The map f
∗
is called the pull-back. Earlier we denoted the dual map of
f
∗
,by f
∗
. This notation is consistent with that of a pull-back because the dual f
∗
: T
∗
f (p)
N
−→ T
p
N,
pulls back 1-forms which are tensors of type T
0
1
(N
) and belong to T
∗
f (p)
N
, to 1-forms in T
∗
p
N,whichare
tensors of type T
0
1
(N).
The pull-back in the algebraic sense can be defined without the further requirement of differentiability,
and the manifold N need not be a submanifold of N
. Next, we examine under what conditions we can
pull-back a covariant tensor on a manifold N and find a coordinate expression in the local coordinates of
N. The answer is given by the following theorem from R. Abraham, J. E. Marsden, and T. Ratiu [2]:
Theorem 7.2 Let N and N
be two finite dimensional manifolds and let f : N −→ N
be a C
∞
map with
a local expression
2
y
i
= f
i
(x
1
, ..., x
m
) i = 1, ..., n in the appropriate charts, where dim(N) = m and
dim(N
) = n. Then, if t is a tensor in T
0
r
(N
), the pull-back f
∗
t is a tensor in T
0
r
(N) and has the coordinate
expression:
( f
∗
t)
j
1
,..., j
s
=
∂y
k
1
∂x
j
1
···
∂y
k
s
∂x
j
s
t
k
1
,...,k
s
◦ f
Here ( f
∗
t)
j
1
,..., j
s
and t
k
1
,...,k
s
, denote the components of the tensors f
∗
t and t, respectively. To pull-back
a tensor from a manifold N
to a manifold N requires a C
∞
map f : N −→ N
, with a coordinate
representation y
j
= f
j
(x
1
, ..., x
m
). There is a certain condition that guarantees that a map between two
manifolds can have a coordinate representation, and thus can be used to pull-back a covariant tensor.
The notion of an immersion is important for the further developement of these ideas (see F. Brickell and
R.S. Clark [13] for more details).
Definition 7.5 Let N
and N be two finite dimensional differentiable manifolds and f : N −→ N
a
C
∞
map, then f is called immersion if for every point a ∈ N rank( f ) = dim(N).
2
Here we also use tensor notation for the coordinates.
Copyright © 2005 by CRC Press LLC

7
-6 Robotics and Automation Handbook
When studying the dynamics of rigid bodies, we deal with Riemannian metrics, which are tensors of type
T
0
2
(N
). Using the general theorem for pulling back covariant tensors and the definition of an immersion,
the following theorem results, see F. Brickell and R.S. Clark [13]:
Theorem 7.3 If a manifold N
has a given positive definite Riemannian metric then any global immersion
f : N −→ N
induces a positive definite Riemannian metric on N.
A manifold N is a submanifold of a manifold N
if N is a subset of N
and the natural injection
i : N −→ N
is an immersion. Submanifolds of this type are called immersed submanifolds. If in
addition, we restrict the natural injection to be one to one, then we have an imbedded submanifold [13].
There is an alternative definition for a submanifold where the subset property is not included along
with the C
∞
structure, see W.M. Boothby [12]. In our case, because we are dealing with the constrained
configuration space of a rigid body which is subset of IE(3), it seems more natural to follow the definition
of a submanifold given by F. Brickell and R.S. Clark [13].
From the previous theorem we conclude that we can induce a Riemannian metric on a manifold N
if there is a Riemannian manifold N
and a map f : N −→ N
, which is an immersion. The manifold
N need not be a submanifold of N
. In general, N will be a subset of N
and the map f : N −→ N
is
needed to induce a metric. We consider a system of rigid bodies with each body of the system as a separate
unit moving in a constraint state space because of the presence of some joint or point contact beween it
and the rest of the bodies. The case of a joint constraint is easier to deal with because the type of joint
also defines the degrees of freedom of the constrained body. The degrees of freedom then define the map
that describes the constrained configuration space of motion as a submanifold of IE(3). Accordingly we
can then induce a Riemannian metric on the constrained configuration space. The case of point contact
is more complicated. We have studied the problem of point contact, where the body moves on a smooth
surface B in [53]. In this work we have shown that the resulting constrained configuration space M is a
subset of IE(3). M is also a submanifold of IE(3) × B and there is a map µ
1
: M −→ IE(3). This map is
not necessarily the natural injection i : M −→ IE(3). The map µ
1
therefore should be an immersion so
that it induces a Riemannian metric on M from IE(3). This is not generally the case when we deal with the
dynamics of constrained rigid body motions defined by point contact.
Using this analysis we can now study the geometric form of Newton’s law for bodies involved in
constrained motion. To begin with we need to endow the submanifold M of IR
3
with a Riemannian
structure. According to the discussion above this is possible using the pull-back of the Riemannian metric
σ on IR
3
through the natural injection j : M −→ IR
3
,where j is by definition an immersion. We let
¯
σ = j
∗
σ denote the induced Riemannian structure on the submanifold M by the pull-back j
∗
. We can
explicitly compute the coordinate representation of the pull-back of the Riemannian metric
¯
σ if we use the
fact that positive definite tensors of order T
0
2
(N
) on a manifold N
can be represented as positive definite
symmetric matrices. In our case, the Riemannian metric in IR
3
can be represented as a 3 × 3 positive
definite symmetric matrix given by
σ =
σ
11
σ
12
σ
13
σ
12
σ
22
σ
23
σ
13
σ
23
σ
33
Assume that the submanifold M is two-dimensional and has coordinates {x
1
, x
2
}, and {y
1
, y
2
, y
3
} are the
coordinates of IR
3
. Then, the derived map j
∗
: TM −→ TIR
3
has the coordinate representation:
j
∗
=
∂ j
1
∂x
1
∂ j
1
∂x
2
∂ j
2
∂x
1
∂ j
2
∂x
2
∂ j
3
∂x
1
∂ j
3
∂x
2
Copyright © 2005 by CRC Press LLC
The Dynamics of Systems of Interacting Rigid Bodies 7
-7
The induced Riemannian metric
¯
σ on M (by using the pull-back) has the following coordinate
representation:
¯
σ = j
∗
σ =
∂ j
1
∂x
1
∂ j
2
∂x
1
∂ j
3
∂x
1
∂ j
1
∂x
2
∂ j
2
∂x
2
∂ j
3
∂x
2
·
σ
11
σ
12
σ
13
σ
12
σ
22
σ
23
σ
13
σ
23
σ
33
·
∂ j
1
∂x
1
∂ j
1
∂x
2
∂ j
2
∂x
1
∂ j
2
∂x
2
∂ j
3
∂x
1
∂ j
3
∂x
2
In a similar way we can pull-back 1-forms from T
∗
N
to T
∗
N, considering that 1-forms are actually
tensors of order T
0
1
(N
). We can represent a 1-form ω in the manifold N
, with coordinates {y
1
, ..., y
n
},
as ω = a
1
dy
1
+···+a
n
dy
n
. Then using the general form for a tensor of type T
0
r
(N
), the pull-back of ω
denoted by
¯
ω = f
∗
ω, has the coordinate representation:
¯
ω =
∂ f
1
∂x
1
···
∂ f
n
∂x
1
.
.
.
.
.
.
∂ f
1
∂x
m
···
∂ f
n
∂x
m
a
1
.
.
.
a
n
where f = f
1
, ..., f
n
is the coordinate representation of f and {x
1
, ..., x
m
} are the coordinates of N.
Using this formula we can “pull-back” the 1-forms that represent the forces acting on the object. Thus on
the submanifold M, the forces acting on the object are described by
¯
F = j
∗
F . If, for example, we consider
the case where M is a two-dimensional submanifold of IR
3
, then the 1-form representing the forces applied
on the object F = F
1
dy
1
+ F
2
dy
2
+ F
3
dy
3
is pulled back to
¯
F = j
∗
F =
∂ j
1
∂x
1
∂ j
2
∂x
1
∂ j
3
∂x
1
∂ j
1
∂x
2
∂ j
2
∂x
2
∂ j
3
∂x
2
·
F
1
F
2
F
3
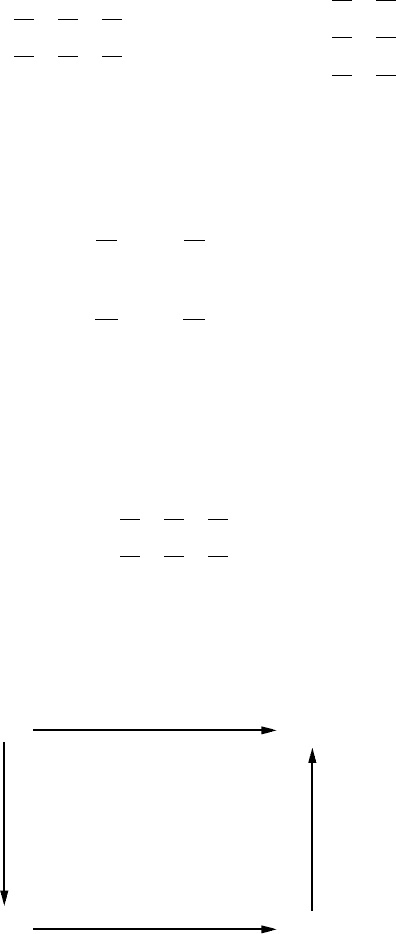
Next we use the results from tensor analysis and Newton’s law to obtain the dynamic equations of a rigid
body on the submanifold M.InNewton’s law the flat map σ
, resulting from the Riemannian metric σ ,
is used. A complete description of the various relations is given by the commutative diagram
TIK
2
T*IK
2
TM T*m
σ
b
σ
b
j
*
j*
Let
¯
c = c |
M
denote the restriction of the curve c(t)toM.Let
¯
∇ denote the connection on M associated
with the Riemannian metric
¯
σ . Then we can describe Newton’slawonM by
¯
σ
(
¯
∇
˙
¯
c(t)
˙
¯
c(t)) =
¯
F
(7.2)
We have to be careful how we interpret the different quantities involved in the constrained dynamic
equation above, because the notation can cause some confusion. Actually, the way we have written
Copyright © 2005 by CRC Press LLC

7
-8 Robotics and Automation Handbook
¯
σ
= j
∗
(σ
◦ j
∗
), j
∗
is the pull-back of the 1-form σ
◦ j
∗
. In contrast with the formula,
¯
σ = j
∗
σ ,
where j
∗
is the pull-back of the tensor σ . Actually it is true that
¯
σ
= ( j
∗
σ )
= j
∗
(σ
◦ j
∗
).
The dynamic Equations (6.2) describe the motion of the object on the submanifold M. The main
advantage of the description of the dynamics of the body on M is that we obtain a more convenient model
of the system for analysis and control purposes.The “reaction” forcesthat wereintroduced asa consequence
of the constraint do not appear explicitly in the model. In the modified 1-forms, that represent the forces
on the constraint submanifold M denoted by
¯
F = j
∗
F , the “reaction” forces belong to the null space of
j
∗
.The“reaction” forces act in directions that tend to separate the rigid body from the constraint, and they
do not belong to T
∗
M. The classical argument that the “reaction” forces do no work along the constrained
path
¯
c(t) gives another justification for this result [6]. In the case of contact between a rigid body and a
surface, the constraint submanifold M of the rigid body is a submanifold of IE(3) × B. The argument that
no work is done along the path
¯
c(t) holds for the case where the surface that the body moves in contact
with is stationary. In the case of a dynamic system that consists of two contacting bodies where the contact
surface is moving, the argument is that the “reaction” forces do exactly the same amount of work, but with
opposite signs. In this case, of course, we have to consider the dynamic equations of both bodies as one
system [20]. As we are going to see in the next section, the reduction of the dynamic equations to describe
motion on the submanifold M, in the case of contact, also involves the description of Euler’s equations
written in geodesic form.
7.4 Euler’s Equations and the Covariant Derivative
In order to have a complete description of the dynamic equations that determine the behavior of a rigid
body in IR
3
, we have to consider Euler’s equations also. This set of differential equations was discovered
by Euler in the 18th century and describes the rotational motion of a rigid body. The original form of the
equations is given by
I
1
˙
ω
1
+ (I
2
− I
3
)ω
2
ω
3
= M
x
I
2
˙
ω
2
+ (I
3
− I
1
)ω
1
ω
3
= M
y
I
3
˙
ω
3
+ (I
1
− I
2
)ω
1
ω
2
= M
z
where ω
1
, ω
2
, ω
3
are the rotational velocities around each axis of a coordinate frame attached to the body.
This coordinate frame is moving along with the body and is chosen such that the axes are coincident with
the principal axes of the body. Thus I
1
, I
2
, and I
3
are the principle moments of inertia. Finally M
x
, M
y
,
and M
z
are the external torques applied around each of these axes.
Euler’s representation of the rotational dynamics, although it has a very simple form, comes with two
major disadvantages. The first is that the equations are described in body coordinates and if we try to
solve the equations for ω
1
, ω
2
, and ω
3
we have no information about the orientation of the body. This is
a consequence of the fact that there is no reference frame, with respect to which the angular orientation
of the bodies can be measured. The second disadvantage is that this form of Euler’s equations obscures
the fact that they have the form of a geodesic on SO(3); SO(3) is the space of rotations of a rigid body in
(IR
3
). The geodesic form of Euler’s equations was discussed by V.I. Arnold in [5]. In this work V.I. Arnold
shows that Euler’s equations in their original form are actually described using the local coordinates of
so(3); here so(3) is the Lie algebra corresponding to SO(3) and is also the tangent space of SO(3) at the
identity element. The main idea is to use the exponential map in order to identify the tangent space of a
group G at the identity T
e
G, with the group (G) itself. The following definition of the exponential map is
based on notions of the flow of a vector field and left invariant vector fields on a group, see, for example,
Boothby [12] or Brickell and Clark [13]:
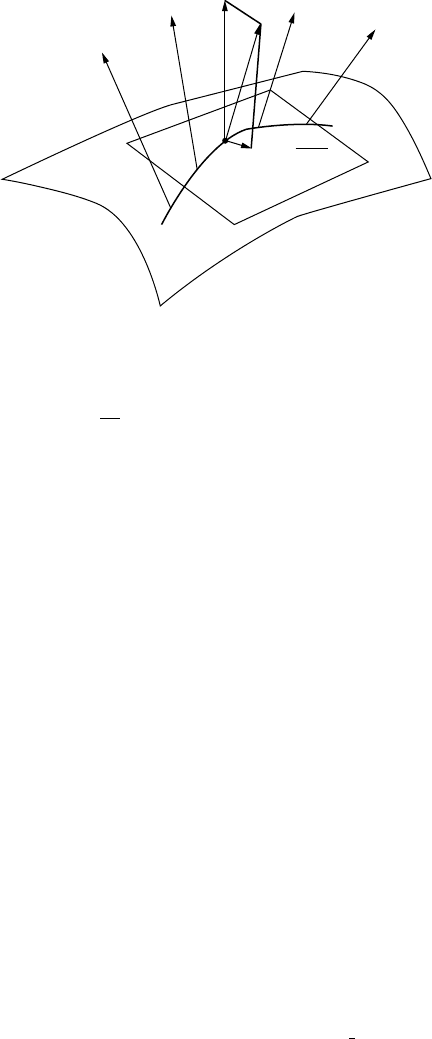
Definition 7.6 Consider a group G and a left invariant vector field X on G.Wedenoteby :
IR ×G −→ G the flow of X which is a differentiable function. For every v ∈ T
e
G, there is a left invariant
vector field X on G such that X
e
= v. Then the exponential map exp : T
e
G −→ G is defined by
v → (1, e).
Copyright © 2005 by CRC Press LLC
The Dynamics of Systems of Interacting Rigid Bodies 7
-9
G
g(t)
e
Φ(1, e)
T
e
G
v
FIGURE 7.2 The action of the exponential map on a group.
Where (1, e) is the result of the flowofavectorfield X applied on the identity element e for t = 1.
Figure 7.2 illustrates how the exponential map operates on elements of a group G.
Consider the tangent space of the Lie group G at the identity element e, denoted by T
e
G. The Lie
algebra of the Lie group G is identified with T
e
G, and it can be denoted by V. The main idea underlying
this analysis is the fact that we can identify a chart in V, in the neighborhood of 0 ∈ V, with a chart in the
neighborhood of e ∈ G.Morespecifically, what V.I. Arnold proves in his work is that Euler’s equations
for a rigid body are equations that describe geodesic curves in the group SO(3), but they are described in
terms of coordinates of the corresponding Lie algebra so(3). This is done by the identification mentioned
above using the exponential map exp : so(3) −→ SO(3). We are going to outline the main concepts and
theorems involved in this construction. A complete presentation of the subject is included in [5]. A Lie
group acts on itself by left and right translations. Thus for every element g ∈ G, we have the following
diffeomorphisms:
L
g
: G −→ G, L
g
h = gh
R
g
: G −→ G, R
g
h = hg
As a result, we also have the following maps on the tangent spaces:
L
g∗
: T
g
G −→ T
gh
G, R
g∗
: T
g
G −→ T
gh
G
Next we consider the map R
g
−1
L
g
: G −→ G, which is a diffeomorphism on the group. Actually, it is
an automorphism because it leaves the identity element of the group fixed. The derived map of R
g
−1
L
g
is
going to be very useful in the construction which follows:
Ad
g
= (R
g
−1
L
g
)
e∗
: T
e
G = V −→ T
e
G = V
Thus, Ad
g
is a linear map of the Lie algebra V to itself. The map Ad
g
has certain properties related to
the Lie bracket [·, ·] of the Lie algebra V. Thus, if exp : V −→ G and g (t) = exp( f (t)) is a curve on G,
then we have the following relations:
Ad
exp( f (t))
ξ = ξ + t[ f, ξ ] +o(t
2
)(t → 0)
Ad
g
[ξ, n] = [Ad
g
ξ, Ad
g
n]
There are two linear maps induced by the left and right translations on the cotangent space of G, T
∗
G.
These maps are the duals to L
g∗
and R
g∗
and are known as pull-backs of L
g
and R
g
, respectively:
L
∗
g
: T
∗
gh
G −→ T
∗
h
G, R
∗
g
: T
∗
hg
G −→ T
∗
h
G
Copyright © 2005 by CRC Press LLC

7
-10 Robotics and Automation Handbook
We have the following properties for the dual maps:
(L
∗
g
ξ, n) = (ξ, L
g∗
n)
(R
∗
g
ξ, n) = (ξ, R
g∗
n)
for ξ ∈ T
∗
g
G, n ∈ T
g
G. Here, (ξ, n) ∈ IR is the value of the linear map ξ applied on the vector field n, both
evaluated at g ∈ G. In general we can define a Euclidean structure on the Lie algebra V via a symmetric
positive definite linear operator A : V −→ V
∗
(A : T
e
G −→ T
∗
e
G), (Aξ, n) = (An, ξ) for all ξ, n ∈ V.
Using the left translation we can define a symmetric operator A
g
: T
g
G −→ T
∗
g
G according to the relation
A
g
ξ = L
∗
g
−1
AL
g
−1
∗
ξ. Finally, via this symmetric operator we can defineametriconT
g
G by
ξ, n
g
= (A
g
n, ξ ) = (A
g
ξ, n) =n, ξ
g
for all ξ, n ∈ T
g
G. The metric ·, ·
g
is a Riemannian metric that is invariant under left translations. At the
identity element e, we denote the metric on T
e
G = V by ·, ·.Wecandefine an operator B : V×V −→ V
using the relation [a, b], c=B(c, a), b for all b ∈ V. B is a bilinear operator, and if we fix the first
argument, B is skew symmetric with respect to the second argument:
B(c, a), b+B(c, b), a=0
In the case of rigid body motions the group is SO(3) and the Lie algebra is so(3), but we are going to
keep the general notation in order to emphasize the fact that this construction is more general and can
be applied to a variety of problems. The rotational part of the motion of a body can be represented by a
trajectory g (t) ∈ G.Thus
˙
g represents the velocity along the trajectory
˙
g ∈ T
g(t)
G. The rotational velocity
with respect to the body coordinate frame is the left translation of the vector
˙
g ∈ G to T
e
G = V. Thus, if
we denote the rotational velocity of the body with respect to the coordinate frame attached to the body by
ω
c
, then we have ω
c
= L
g
−1
∗
˙
g ∈ V. In a similar manner the rotational velocity of the body with respect
to an inertial (stationary) frame is the right translation of the vector
˙
g ∈ T
g(t)
G to T
e
G = V, which we
denote by ω
s
= R
g
−1
∗
˙
g ∈ V.
In this case we have that A
g
: T
g
G −→ T
∗
g
G is an inertia operator. Next, we denote the inertia
operator at the identity by A : T
e
G −→ T
∗
e
G. The angular momentum M = A
g
˙
g ∈ V can be expressed
with respect to the body coordinate frame as M
c
= L
∗
g
M = Aω
c
and with respect to an inertial frame
M
s
= R
∗
g
M = Ad
∗
g
−1
M (Ad
∗
g
−1
is the dual of Ad
g
−1
∗
).
Euler’s equations according to the notation established above are given by
dω
c
dt
= B(ω
c
, ω
c
), ω
c
= L
g
−1
∗
˙
g
This form of Euler’s equations can be derived in two steps. Consider first a geodesic g (t) ∈ G such that
g(0) = e and
˙
g(0) = ω
c
. Because the metric is left invariant, the left translation of a geodesic is also a
geodesic. Thus the derivative
dω
c
dt
depends only on ω
c
and not on g.
Using the exponential map, we can consider a neighborhood of 0 ∈ V as a chart of a neighborhood of
the identity element e ∈ G. As a consequence, the tangent space at a point a ∈ V, namely T
a
V, is identified
naturally with V. Thus the following lemma can be stated.
Lemma 7.1 Consider the left translation L
exp(a)
for a ∈ V. This map can be identified with L
a
for
a→0. The corresponding derived map is denoted by L
∗a
, and L
∗a
: V = T
0
V → V = T
a
V.Ifξ ∈ V
then
L
a∗
ξ = ξ +
1
2
[a, ξ ] + o(a
2
)
Because geodesics can be translated to the origin using coordinates of the algebra V, the derivative
dω
c
dt
gives the Euler equations. The proof of the lemma as well as more details on the rest of the arguments can
be found in [5].
Copyright © 2005 by CRC Press LLC