Klir G.J. Uncertainity and Information. Foundations of Generalized Information Theory
Подождите немного. Документ загружается.

Hence S(X ¥ Y ) £ S(X) = S(Y ); and furthermore (again by Gibbs’ theorem),
the equality holds if and only if
which means that the random variables whose state sets are X and Y are
noninteractive. 䊏
Theorem 3.4 can easily be generalized to more than two sets. Its general
form is
(3.39)
which holds for every n Œ ⺞.
Theorem 3.5
(3.40)
Proof. From Theorem 3.3,
and from Theorem 3.4
Hence,
and the inequality
follows immediately. 䊏
Exchanging X and Y in Theorem 3.5, we obtain
Additional equations expressing the relationships among the various
entropies and the information transmission can be obtained by simple formula
SY SY X
()
≥
()
.
SX Y SX
()
£
()
SX Y SY SX SY
()
+
()
£
()
+
()
,
SX Y SX SY¥
()
£
()
+
()
.
SX Y SX Y SY
()
=¥
()
-
()
,
SX SX Y
()
≥
()
.
SX X X SX
ni
i
n
12
1
¥¥¥
()
£
()
=
Â
...
,
px y p x p y
XY
,,
()
=
()
◊
()
82 3. CLASSICAL PROBABILITY-BASED UNCERTAINTY THEORY
manipulations with the aid of key properties in Theorems 3.3 through 3.5. For
example, when we substitute for S(X, Y) from Eq. (3.35) into Eq. (3.34), we
obtain
(3.41)
similarly, by substituting Eq. (3.36) into Eq. (3.34), we obtain
(3.42)
By comparing Eqs. (3.41) and (3.42), we also obtain
(3.43)
For each type of the Shannon entropy, S, the normalized counterpart, NS,
is calculated by dividing the respective entropy by its maximum value. Thus,
for example,
(3.44)
(3.45)
(3.46)
The range of each of these counterparts is, of course, [0, 1]. The maximum
value, T
ˆ
S
(X, Y), of information transmission associated with joint probability
distributions on X ¥ Y can be derived in a similar way as its possibilistic coun-
terpart (Eq. (2.34)). It is given by the formula
(3.47)
Then,
(3.48)
3.2.4. Examples
The purpose of this section is to illustrate the various properties and applica-
tions of the Shannon entropy by simple examples, some of which are proba-
bilistic counterparts of examples in Chapter 2.
NT X Y
TXY
TXY
S
S
S
,
,
ˆ
,
.
()
=
()
()
ˆ
, min log ,log .TXY X Y
S
()
=
{}
22
NS X Y
SX Y
X
()
=
()
log
.
2
NS X Y
SX Y
XY
¥
()
=
¥
()
◊
()
log
,
2
NS X
SX
X
()
=
()
log
,
2
SX SY SX Y SY X
()
-
()
=
()
-
()
.
TXY SY SYX
S
,.
()
=
()
-
()
TXY SX SXY
S
,;
()
=
()
-
()
3.2. SHANNON MEASURE OF UNCERTAINTY FOR FINITE SETS 83
EXAMPLE 3.2. Consider two variables, X and Y, whose states are 0 or 1 and
whose joint probabilities p(x, y) on X ¥ Y = {0, 1}
2
are specified in Table 3.1a.
Uncertainty associated with these joint probabilities is determined by the
Shannon entropy
The marginal probabilities p
X
(x) and p
Y
(y), calculated by Eqs. (3.5) and (3.6),
are shown in Table 3.1b. Their uncertainties are:
The conditional uncertainties can now be calculated by Eqs. (3.35) and (3.36):
Moreover, the information transmission, which expresses the strength of the
relationship between the variables, can be calculated by Eq. (3.34):
EXAMPLE 3.3. Consider the same variables as in Example 3.2. However,
only their marginal probabilities given in Table 3.1b are known.Assume in this
TXY SX SY SXY
S
,..
()
=
()
+
()
-¥
()
= 019
SX Y SX Y SY
SY X SX Y SX
()
=¥
()
-
()
=
()
=¥
()
-
()
=
028
069
.,
..
SX
SY
()
=- - =
()
=- - =
09 01 01 01 047
07 07 03 03 088
22
22
. log . . log . . ,
. log . . log . . .
SX Y¥
()
=- - - =07 07 02 02 01 01 116
222
. log . . log . . log . . .
84 3. CLASSICAL PROBABILITY-BASED UNCERTAINTY THEORY
Table 3.1. Illustration to Example 3.2
xy p(x, y)
0 0 0.7
0 1 0.2
1 0 0.0
1 1 0.1
(a)
xp
X
(x) yp
Y
(y)
0 0.9 0 0.7
1 0.1 1 0.3
(b)
xyp
X
(x)·p
Y
(y)
0 0 0.63
0 1 0.27
1 0 0.07
1 1 0.03
(c)
example that the variables are independent. Since probabilistic independence
is equivalent to probabilistic nonineteraction, as shown in Section 3.1.1, we can
calculate their joint probability distribution based on this assumption by Eq.
(3.7). This joint distribution is shown in Table 3.1c. The uncertainty, S
ind
, based
on the assumption of independence is thus readily calculated as
Observe that S
ind
(X ¥ Y ) - S(X ¥ Y ) = 0.19. This means that 0.19 bits of infor-
mation are gained when we know the actual joint probability distribution in
Table 3.1a.
EXAMPLE 3.4. Consider three variables, X, Y, Z, whose states are in sets X
= Y = {0, 1} and Z = {0, 1, 2}, respectively. The joint probabilities on X ¥ Y ¥ Z
are given in Table 3.2a. In this case, there are six distinct conditional uncer-
tainties and four distinct information transmissions.To calculate them, we need
SXY
ind
¥
()
=- -
-- =
063 063 027 027
007 007 003 003 135
22
22
. log . . log .
. log . . log . . .
3.2. SHANNON MEASURE OF UNCERTAINTY FOR FINITE SETS 85
Table 3.2. Illustration to Example 3.4
xyzp(x,y,z)
0 0 0 0.05
0 1 0 0.10
0 0 2 0.22
1 0 0 0.05
1 0 1 0.20
1 0 2 0.10
1 1 1 0.08
1 1 2 0.20
(a)
xyp
XY
(x,y)
0 0 0.27
0 1 0.10
1 0 0.35
1 1 0.28
xzp
XZ
(x,z)
0 0 0.15
0 2 0.22
1 0 0.05
1 1 0.28
1 2 0.30
yzp
YZ
(y,z)
0 0 0.10
0 1 0.20
0 2 0.32
1 0 0.10
1 1 0.08
1 2 0.20
xp
X
(x)
0 0.37
1 0.63
yp
Y
(y)
0 0.62
1 0.38
zp
Z
(z)
0 0.20
1 0.28
2 0.52
S(X ¥ Y ¥ Z) = 2.80 S(X ¥ Y) = 1.89 S(X) = 0.95
S(X ¥ Z) = 2.14 S(Y) = 0.96
S(Y ¥ Z) = 2.41 S(Z) = 1.47
(d)
(b)
(c)
to determine all two-variable marginal probability distributions (shown in
Table 3.2b) and all one-variable marginal probability distributions (shown
in Table 3.2c). Values of the Shannon entropy for all probability distributions
in Table 3.2(a)–(c) are shown in Table 3.2d. These values form the basis from
which all the conditional uncertainties and information transmissions are
calculated as follows:
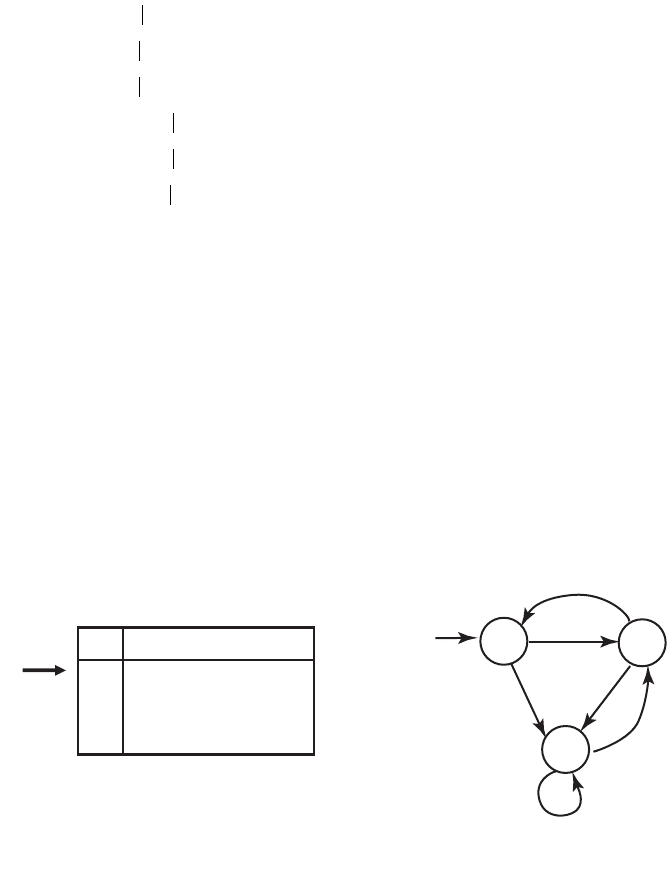
EXAMPLE 3.5. This example is in some sense a probabilistic counterpart of
the simple nondeterministic dynamic system discussed in possibilistic terms
in Examples 2.1 and 2.2. The subject here is a simple probabilistic dynamic
system with state set X = {x
1
, x
2
, x
3
}. State transitions of the system occur only
at specified discrete times and are fully determined for each initial probabil-
ity distribution on X by the conditional probabilities specified by the matrix
or the diagram in Figure 3.3a and 3.3b, respectively.
SX Y Z SX Y Z SY Z
SY X Z SX Y Z SX Z
SZ X Y SX Y Z SX Y
SX Y Z SX Y Z SZ
SX Z Y SX
¥
()
=¥¥
()
-¥
()
=
¥
()
=¥¥
()
-¥
()
=
¥
()
=¥¥
()
-¥
()
=
¥
()
=¥¥
()
-
()
=
¥
()
=¥
039
066
091
133
.
.
.
.
YYZ SY
SY Z X SX Y Z SX
TX YZ SX Y SZ SX Y Z
TX ZY SX Z SY SX Y Z
TY Z X SY
¥
()
-
()
=
¥
()
=¥¥
()
-
()
=
¥
()
=¥
()
+
()
-¥¥
()
=
¥
()
=¥
()
+
()
-¥¥
()
=
¥
()
=
184
185
056
030
.
.
,.
,.
, ¥¥
()
+
()
-¥¥
()
=
¥
()
=
()
+
()
+
()
-¥¥
()
=
ZSXSXYZ
TX YZ SX SY SZ SX Y Z
056
058
.
,..
86 3. CLASSICAL PROBABILITY-BASED UNCERTAINTY THEORY
m
ij
1
1
x
t
+
2
1
x
t
+
3
1
x
t
+
1
x
t
0.0 0.9 0.1
2
x
t
0.2 0.0 0.8
3
x
t
0.0 0.6 0.4
= M
(a)
(b)
Next states
Present states
0.2
0.9
0.1
0.8
0.6
0.4
X
1
X
2
X
3
Figure 3.3. Simple probabilistic system discussed in Example 3.5.

To describe how the system behaves, let t = 1,2,...denote discrete times
at which state-transitions occur, let p(
t
x
i
) denote the probability of state x
i
at
time t, and let
denote the probability distribution of all states of the system at time t. Fur-
thermore, let M = [m
ij
] denote the matrix of conditional probabilities
p(
t+1
x
j
|
t
x
i
) for all pairs ·x
i
, x
j
ÒŒX
2
, which are independent of t. That is,
for all i, j Œ ⺞
3
and all t Œ⺞.
Given the probability distribution
t
p at some time t, the system is capable
of predicting probability distributions at time t + k (k = 1, 2, . . .) or probabil-
ity distributions of sequences of future states of some lengths. The Shannon
entropy of each of these distributions measures the amount of uncertainty in
the respective prediction.We can also measure the amount of information con-
tained in each prediction made by the system (predictive informativeness of
the system). For each prediction type, this is the difference between the
maximum predictive uncertainty allowed by the framework of the system and
the actual predictive uncertainty. The maximum predictive uncertainty is
obtained for the state-transition matrix, M
ˆ
= [mˆ
ij
], in which each row is a
uniform probability distribution. In our case mˆ
ij
= 1/3 for all i, j Œ ⺞.
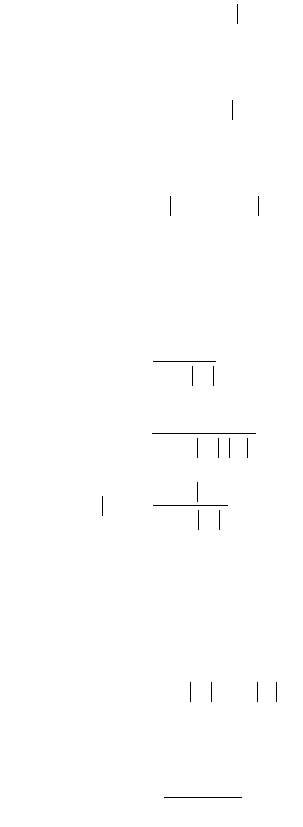
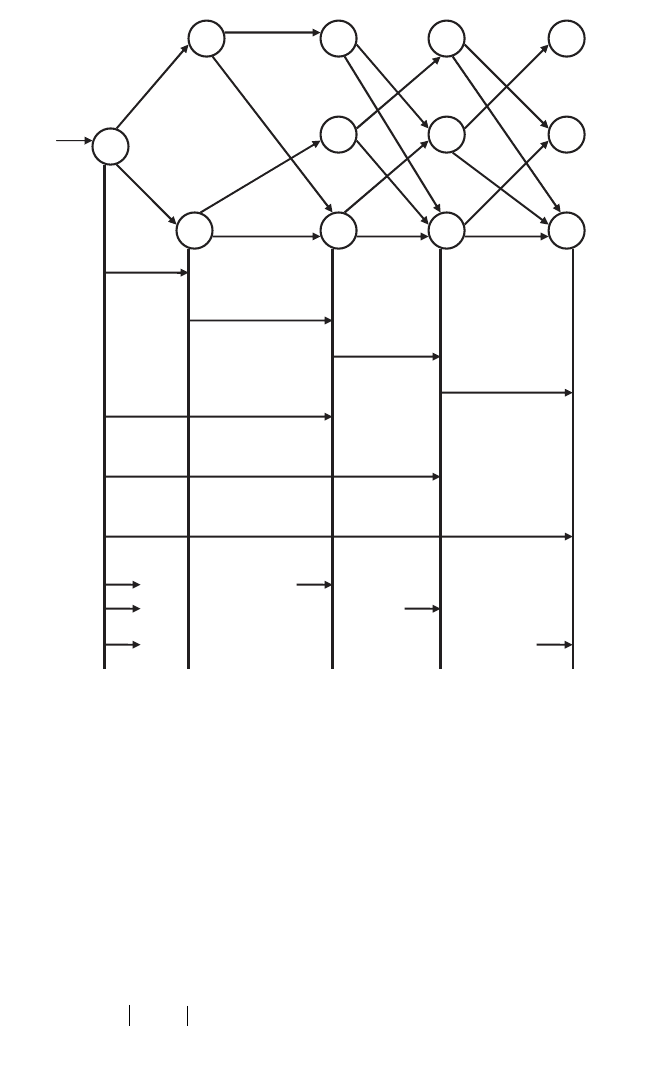
To illustrate the calculations of predictive uncertainty and predictive infor-
mativeness for the various prediction types, let us assume that the system is
in state x
1
at time t (as indicated in Figure 3.3 by the arrow pointed at x
1
).
This is formally expressed as
t
p =·1, 0, 0Ò. Maximum and actual uncertainties
for some predictions are given in Figure 3.4. The diagram, which contains all
sequences of states with nonzero probabilities of length 4 or less, also shows
probabilities of individual states at each of the considered times. Each of the
arrows under the diagram indicates the time at which the prediction is made
and the time span of the prediction. Each of the first four arrows is a predic-
tion about the next-time probability distributions made at different times.The
next three arrows indicate predictions made at time t about sequences of states
of lengths 2, 3, and 4. The last three arrows indicate predictions made at time
t about probability distributions at time t + 2, t + 3, and t + 4. The two numbers
on top of each arrow indicate the two uncertainties needed for calculating the
informativeness of the prediction, the maximum one and the actual one. Let
us follow in detail the calculation of some of these uncertainties.
Using Figure 3.4 as a guide, the next state prediction made at t + 2 is cal-
culated by the formula
tt++
=¥
32
ppM.
mpxx
i
j
t
j
t
i
=
()
+1
tt
ii
px x Xp =
()
Œ
3.2. SHANNON MEASURE OF UNCERTAINTY FOR FINITE SETS 87
Substituting for
t+2
p and M, we obtain
Its uncertainty is measured by the conditional Shannon entropy
Sp x x ij S S
S
t
j
t
i
++
()
Œ
[]
=◊
()
+◊
()
+◊
()
=
32
3
018 00 0901 006 02 00 08
076 00 0604
0 866
, . .,.,. . .,.,.
. .,.,.
.,
⺞
t+
=
[]
¥
È
Î
Í
Í
˘
˚
˙
˙
=
[]
2
018 006076
00 09 01
02 00 08
00 06 04
0 012 0 618 0 370
p .,.,.
...
...
...
.,.,. .
88 3. CLASSICAL PROBABILITY-BASED UNCERTAINTY THEORY
x
2
x
1
x
1
x
1
x
1
x
2
x
2
x
2
x
3
x
3
x
3
x
3
1
0.9
0.9
0.2
0.18
0.9
0.1
0.012 0.1236
0.2328
0.6436
0.9
0.1
0.618
0.2
0.8
0.370
0.6
0.4 0.4 0.4
0.1
0.1
0.6
0.8
0.06
0.2
0.8
0 .76
0.6
1.585
0.469
1.585
0.747
1.585
0.866
1.585
0.811
3.17
1.216
4.755
2.082
6.34
2.893
1.585
0.99
1.585
1.036
1.585
1.272
t t + 1 t + 2 t + 3 t + 4
Figure 3.4. Predictive uncertainties of the system defined in Example 3.5.
which is calculated here by using Eq. (3.32). Its maximum counterpart, S
ˆ
,is
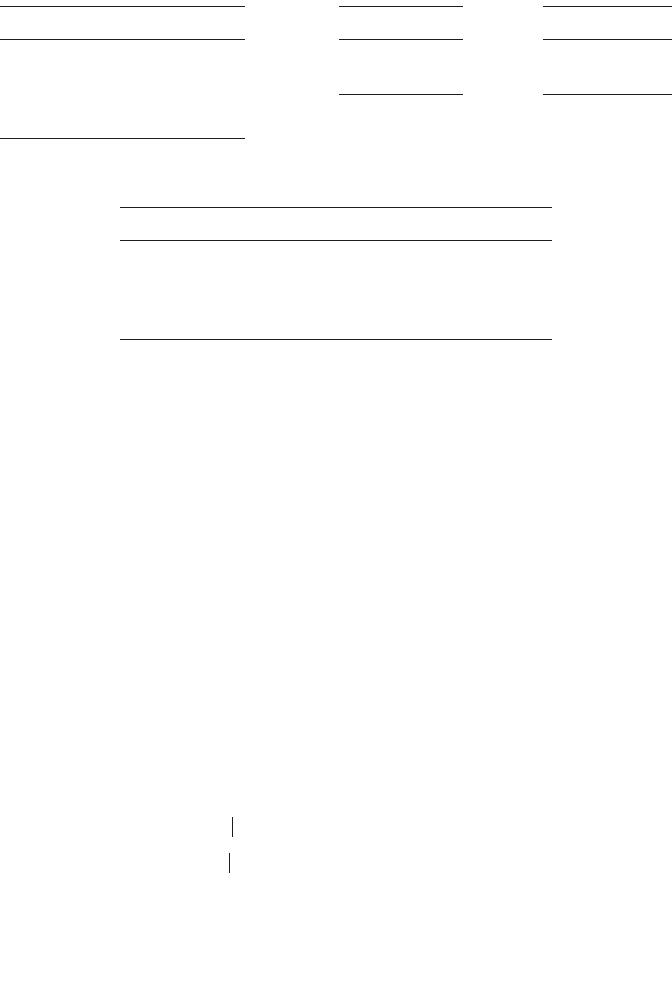
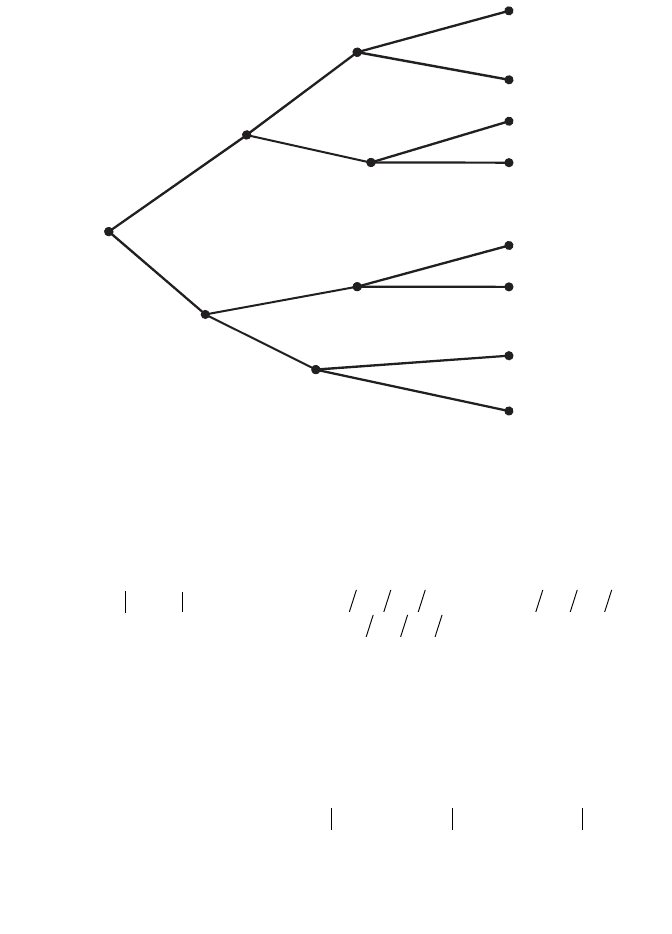
Now consider the prediction made at time t of sequences of states of length
3.There are, of course, 3
3
= 27 such sequences, but only 8 of them have nonzero
probabilities; these are shown in Figure 3.5. Probabilities of these sequences
are calculated by the formula
for all i, j, k Œ ⺞
3
. For example,
The amount of uncertainty in predicting at time t sequences of states at times
t + 1, t + 2, t + 3 is measured by the Shannon entropy for the probability dis-
tribution obtained for the sequences and shown in Figure 3.5. Its value is 2.082.
Since there are 27 possible sequences of states of length 3, the associated
maximum uncertainty is clearly equal to log
2
27 = 4.755.
px x x
tt t++ +
()
=¥¥¥=
1
2
2
3
3
2
1 0 9 0 8 0 6 0 432,, .....
px x x px pxx p x x px x
t
i
t
j
t
k
tt
i
tt
j
t
i
t
k
t
j
++ + + + + + +
()
=
()
¥
()
¥
()
¥
()
12 3
1
1
1
21 3 2
,,
ˆ
ˆ
,.,,.,,
.,,
log . .
Sp x x ij S S
S
t
j
t
i
++
()
Œ
[]
=◊
()
+◊
()
+◊
()
==
32
3
2
018 131313 006 131313
076 131313
3 1 585
⺞
3.2. SHANNON MEASURE OF UNCERTAINTY FOR FINITE SETS 89
x
1
x
2
: 0.162
x
3
: 0.018
x
2
: 0.432
x
3
: 0.288
x
1
: 0.012
x
3
: 0.048
x
2
: 0.024
x
3
: 0.016
x
2
x
1
x
3
x
3
x
2
x
3
0.9
0.8
0.2
0.9
0.1
0.6
0.4
0.2
0.8
0.6
0.4
0.4
0.1
0.6
Figure 3.5. Probabilities of sequences of states of length 3 in Example 3.5.
Predicting at time t sequences of states at times t + 1, t + 2, and t + 3 is, of
course, very different from predicting states at time t + 3. The latter prediction
is based on probabilities
for all i, k Œ⺞
3
. Since p(
t
x
1
) = 1 in our case, the only relevant probabilities are
The predictive uncertainty is thus equal to S(0.012, 0.618, 0.370) = 1.036, and
the maximum counterpart is equal to log
2
3 = 1.585.
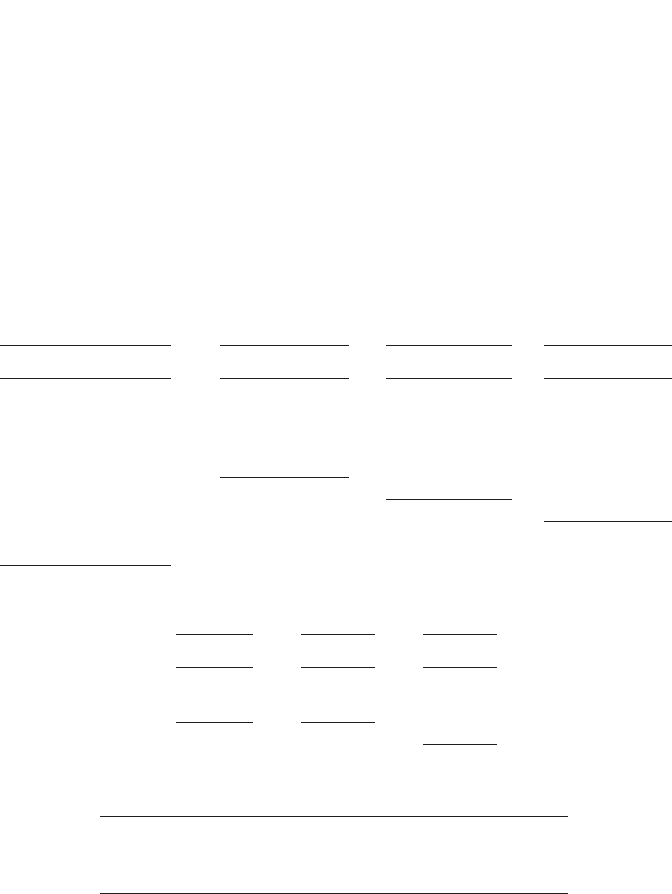
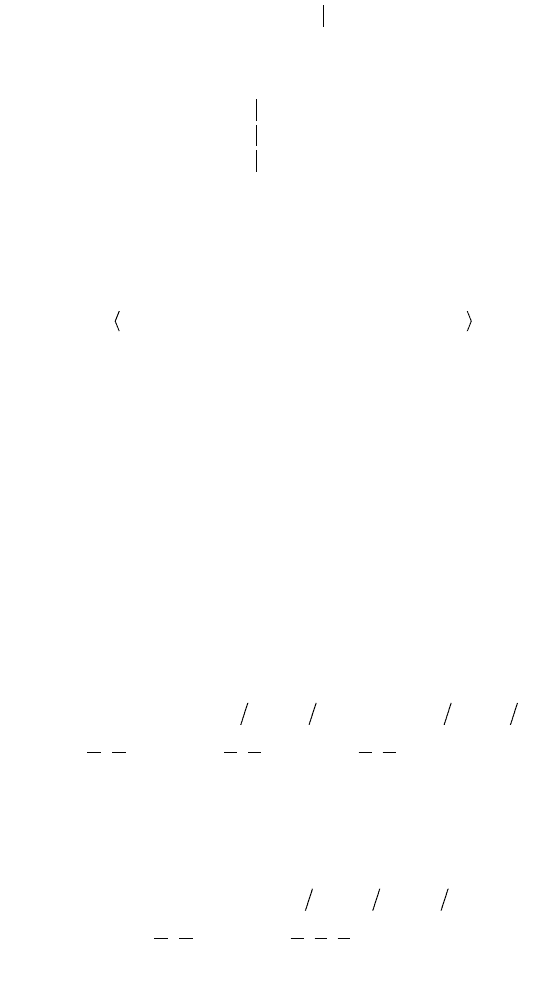
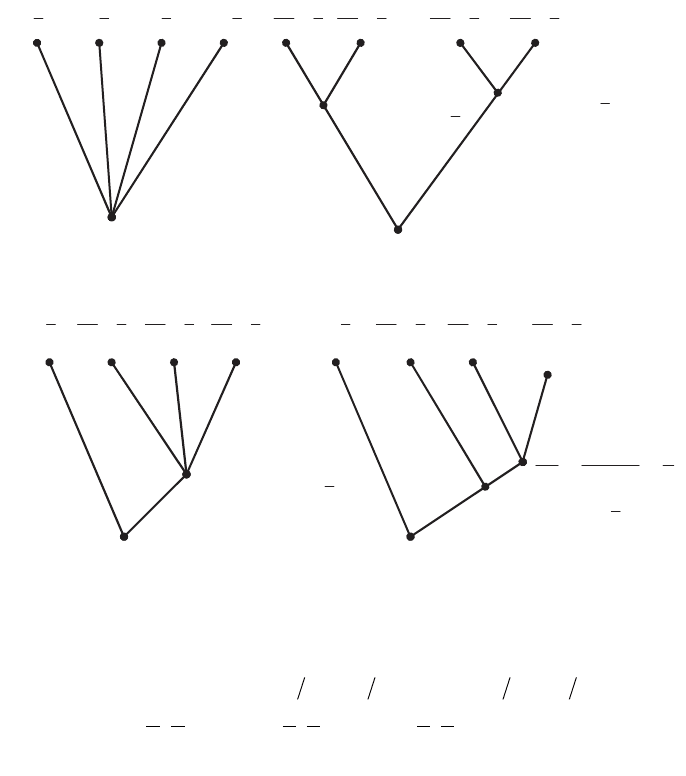
EXAMPLE 3.6. Let the set X = {x
1
, x
2
, x
3
, x
4
} with the probability distribution
be given where p
i
denotes the probability of x
i
for all i Œ ⺞
4
. Consider the
four branching schemes specified in Figure 3.6 for calculating the uncertainty
of this probability distribution. Employing the branching property of the
Shannon entropy, the resulting uncertainty should be the same regardless of
which of the branching schemes we use. Let us perform and compare the four
schemes of calculating the uncertainty.
Scheme I. According to this scheme, we calculate the uncertainty directly:
Scheme II
Scheme III
Sp Sp p p Sp p p p p p
SS
AA A A A
()
=
()
+◊
()
=
Ê
Ë
ˆ
¯
+◊
Ê
Ë
ˆ
¯
=+=
1234
1
4
3
4
075
2
3
1
6
1
6
0 811 0 939 1 75
,,,
,. ,,
....
Sp Sp p p Sp p p p p Sp p p p
SSS
AB A A A B B B
()
=
()
+◊
()
+◊
()
=
Ê
Ë
ˆ
¯
+◊
Ê
Ë
ˆ
¯
+◊
Ê
Ë
ˆ
¯
=++=
,, ,
,. ,. ,
.....
12 34
3
4
1
4
075
1
3
2
3
025
1
2
1
2
0 811 0 689 0 25 1 75
Sp
()
=- - - ¥
=++ =
0 25 0 25 0 5 0 5 2 0 125 0 125
05 05 075 175
22 2
. log . . log . . log .
... ..
p == = = =ppp p
123 4
0 25 0 5 0 125 0 125., ., . , .
pxx
pxx
pxx
tt
tt
tt
+
+
+
()
=
()
=
()
=
2
11
2
21
2
31
0 012
0 618
0 370
.,
.,
..
px p x x
t
i
t
k
t
i
()
◊
()
+2
90 3. CLASSICAL PROBABILITY-BASED UNCERTAINTY THEORY
Scheme IV
These results thus demonstrate that the uncertainty can be calculated in terms
of any branching scheme. There are, of course, many additional branching
schemes in this example, each of which can be employed for calculating the
uncertainty and each of which must lead to the same result.
3.3. SHANNON-LIKE MEASURE OF UNCERTAINTY FOR
INFINITE SETS
One important aspect of the Shannon entropy remains to be discussed. This
aspect concerns its restriction to finite sets. Is this restriction necessary? It is
suggestive that the function
Sp Sp p p Sp p p p p Sp p p p
SSS
AA ABAB B B
()
=
()
+◊
()
+◊
()
=
Ê
Ë
ˆ
¯
+◊
Ê
Ë
ˆ
¯
+◊
Ê
Ë
ˆ
¯
=++=
12 34
1
4
3
4
075
2
3
1
3
025
1
2
1
2
0 811 0 689 0 25 1 75
,, ,
,. ,. ,
.....
3.3. SHANNON-LIKE MEASURE OF UNCERTAINTY FOR INFINITE SETS 91
( p)
Scheme I
4
1
1
=
p
2
1
2
=
p
8
1
3
=
p
8
1
4
=
p
( p
A
, p
B
)
Scheme II
3
1
1
=
A
p
p
3
2
2
=
A
p
p
2
1
3
=
B
p
p
2
1
4
=
B
p
p
( p
1
, p
A
)
Scheme III
4
1
1
=
p
3
2
2
=
A
p
p
6
1
3
=
A
p
p
6
1
4
=
A
p
p
( p
1
, p
A
, ( p
2
, p
B
))
Scheme IV
4
1
1
=
p
3
2
2
=
A
p
p
2
1
3
=
B
p
p
2
1
4
=
B
p
p
4
3
21
=+=
ppp
A
4
3
432
=++=
pppp
A
4
1
43
=+=
ppp
B
4
3
432
=++=
pppp
A
2
1
43
=
+
=
AA
B
p
pp
p
p
Figure 3.6. Application of the branching property of Shannon entropy.