Klein B. FEM: Grundlagen und Anwendungen der Finite-Element-Methode im Maschinen - und Fahrzeugbau
Подождите немного. Документ загружается.

11 FEM-Ansatz für Wärmeübertragungsprobleme
278
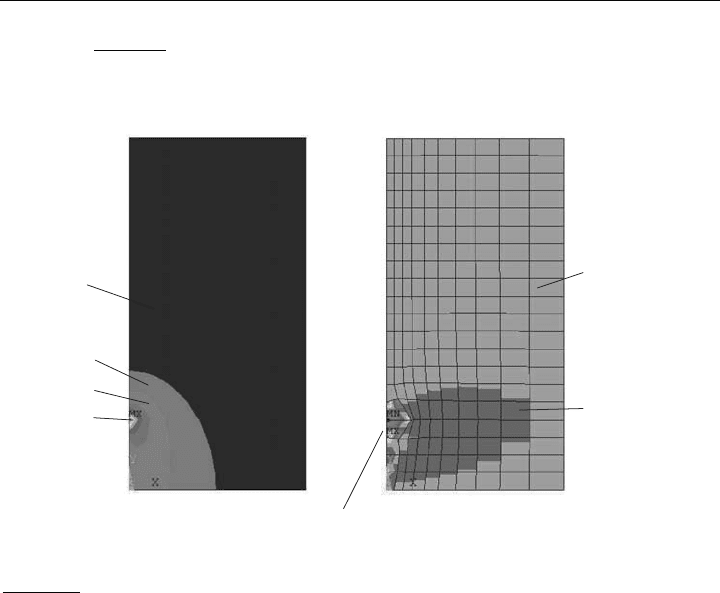
Weiter gibt Bild 11.8
Informationen über den Temperaturverlauf in der Schweißnaht und die
augenblicklich initiierte Elementspannung.
aufgeschmolzenes
Metall
a)
b
)
T = 685 °C
T = 463 °C
T = 537 °C
T = 20 °C
2
mm/N165
V
2
mm/N249
V
Bild 11.8: Ausgewerteter Temperatur- und Spannungsverlauf im Blech (analysiert mit
ANSYS) bei s = 10 mm
Im Zentrum der externen Wärmequelle ist die FE-Berechnung allerdings sehr unsicher.

279
12 Mehrkörpersysteme
In den letzten Jahren hat mit der Entwicklung mechatronischer Systeme der MKS-Ansatz
größere Bedeutung erlangt, da er Kinematik, Kinetik und Elastik (EMKS)
*)
miteinander ver-
knüpfen kann. Mittlerweile können umfangreiche MKS-Analysen mit komfortablen Pro-
grammen (z. B. MEDYNA, ADAMS-ANYS) bearbeitet werden, wobei die Programme lau-
fend verbessert werden. Erst die MKS-Theorie hat Gesamtsystemsimulationen (Fahrzeuge,
Roboter etc.) im Rechner ermöglicht und die Probleme somit einer Optimierung /KNO 96/
erschlossen. Weil die Anwendungsbreite zunehmen wird, soll abschließend noch die Lücke
zwischen MKS und FEM geschlossen werden.
12.1 Merkmale eines MKS
In der Technik kommen überwiegend geregelte Mehrkörpersysteme /LAG 94/ mit definier-
ten An- und Abtrieben vor. Diese Systeme bezeichnet man als kinematisch linear, wenn die
Geometrie- bzw. Lageänderungen zwischen den Einzelkörpern klein bleiben. Nichtlineare
Geometrien kommen in der Praxis recht selten vor.
Ein Mehrkörpersystem stellt immer ein mechanisches Ersatzsystem (Modell) einer techni-
schen Realisierung dar. Hieraus folgt, dass Annahmen zu treffen sind, die die „realen
Verhältnisse“ bestmöglich annähern. „Bestmöglich“ bedeutet im Ingenieurwesen: so real
wie möglich, einschätzbare Vernachlässigungen und angemessener Aufwand.
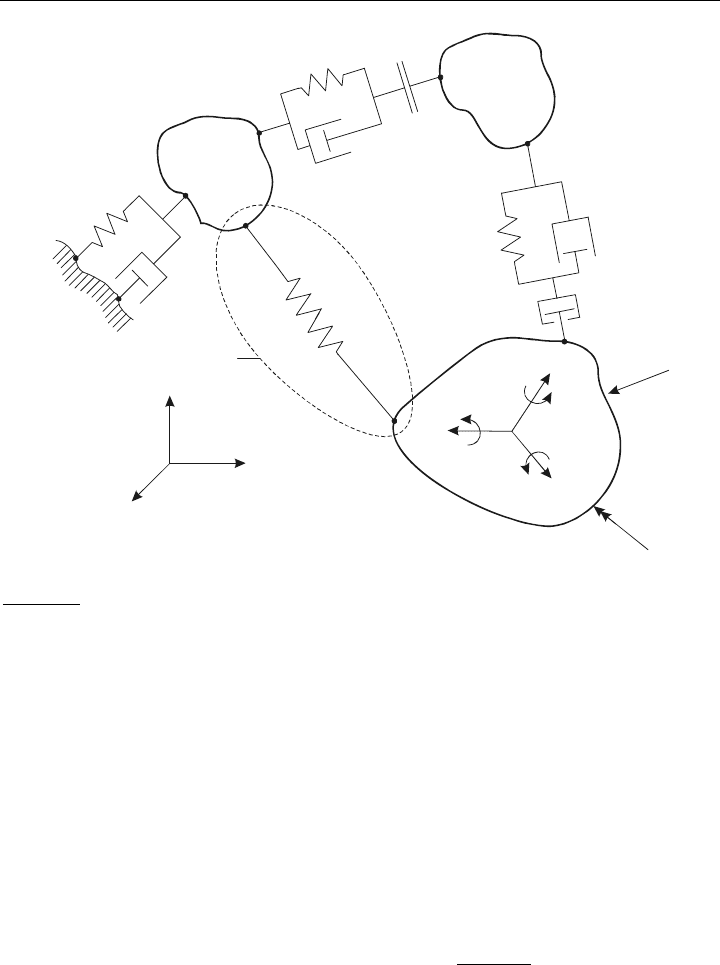
Im umseitigen Bild 12.1 ist ein mögliches Mehrkörpersystem angedeutet worden. Diesem
lassen sich die folgenden Eigenschaften zuordnen:
Es besteht aus einer endlichen Anzahl N von Körpern (starr oder elastisch).
Die Körper sind durch passive, mechanische oder elektromechanische sowie durch aktive
Elemente (Antriebe) untereinander verbunden. Zugleich treten kinematische Bedingungen
durch Führungen, Lager und Gelenke auf.
Die kinematischen Bindungen erzeugen Zwänge, die die Bewegungsmöglichkeiten des
MKS einschränken.
und
Auf die Körper können äußere Kräfte
i
F und Momente
i
M (i = 1, ..., n) einwirken.
Wird mit r die Anzahl der gegebenen Zwangsbedingungen bezeichnet, dann hat das MKS
den Freiheitsgrad
f = rN6 (bei räumlichen Bewegungen)
bzw.
f = rN3 (bei ebenen Bewegungen).
*)
Anmerkung: Bei MKS existiert auch eine Theorie der „flexiblen MKS“, abgekürzt EMKS.
12 Mehrkörpersysteme
280
Körper
Kupplung
Körper
Feder
Dämpfer
Spiel
Körper i
i
M
0
KS
)(
z
x
y
Inertialsystem
i
F
i
y
i
z
zi
I
yi
I
i
x
xi
I
i
)KS(
Um-
gebung
Gelenk
Bild 12.1: Verallgemeinertes Mehrkörpersystem
Definitionsgemäß heißt ein Freiheitsgrad aktiv, wenn er zu einem unabhängigen Antrieb ge-
hört. Bei einem aktiven Mechanismus (z. B. Roboter) sind im Allgemeinen alle Freiheits-
grade aktiv. Die Freiheitsgrade (FHG) werden dabei von der Ausführung der Gelenke be-
einflusst. Gelenke können gewisse Freiheitsgrade sperren und darüber die Beweglichkeit
einschränken.
Ein wichtiges Lösungsmerkmal für MKS ist der Strukturaufbau (Topologie, s. /WAL 89/):
Systeme mit Baumstruktur: Solche Systeme zerfallen in getrennte Teilsysteme mit
Zwanglauf, wenn alle Gelenke zwischen einem beliebigen Knotenpaar entfernt werden.
Für derartige Systeme sind die Bewegungsgleichungen leicht zu ermitteln.
Systeme mit kinematisch geschlossenen Schleifen: Dies sind Systeme, bei denen die
zuvor aufgestellte Bedingung nicht erfüllt ist. Das im Bild 12.1 modellierte System hat
keine Baumstruktur: Auf dem Weg von der Umgebung über die drei Körper zurück zum
Ausgangspunkt gibt es zwischen allen Körpern ein Gelenk. Man kann das System nicht in
zwei Teilsysteme zerlegen, wenn man nur ein Gelenk entfernt. Das Aufstellen der Bewe-
gungsgleichungen für kinematisch geschlossene Schleifen ist extrem aufwändig, da neben
den Bindungsgleichungen auch noch Verträglichkeitsbedingungen zu berücksichtigen
sind.

12.2 Kinematik von MKS
281
Ziel muss es stets sein, die Kinematik eines MKS durch elementare Gleichungen der Mecha-
nik /SCH 99/ zu beschreiben.
12.2 Kinematik von MKS
Die Aufgabenstellung der Kinematik ist die Ermittlung der Lage, Geschwindigkeit und Be-
schleunigung von bewegten Einzelkörpern. Hierbei wird die Lage eines Körpers durch seine
Position und seine Orientierung erfasst.
Zur Erfassung der räumlichen Bewegung eines Körpers wird ein Referenzkoordinatensystem
R
)KS( benötigt. Weiterhin ist ein mit dem Körper (z. B. i-ter Körper) fest verbundenes
Koordinatensystem (hier
i
KS ) erforderlich. Das allgemeine Kinematikproblem kann inso-
fern auf die Dynamik der Koordinatensysteme zurückgeführt werden.
Zu beachten ist dabei aber noch, dass es für die Wahl des Referenzsystems zwei grundsätz-
lich unterschiedliche Möglichkeiten gibt:
a) Das Referenzsystem ist ein Inertialsystem
o
)KS( , d. h., das Koordinatensystem ist be-
schleunigungsfrei. In der Anwendung wird das
o
)KS( in der Regel auf eine nicht be-
wegliche Basis gesetzt; die Bewegung eines Körpers wird dann bezüglich dieser Basis
in Inertialkoordinaten beschrieben.
b) Das Referenzsystem ist ein Relativsystem, d. h. ein mit einem anderen beweglichen Kör-
per j des MKS verbundenes Koordinatensystem. Die Bewegung eines Körpers wird re-
lativ zu einem Referenzkörper beschrieben.
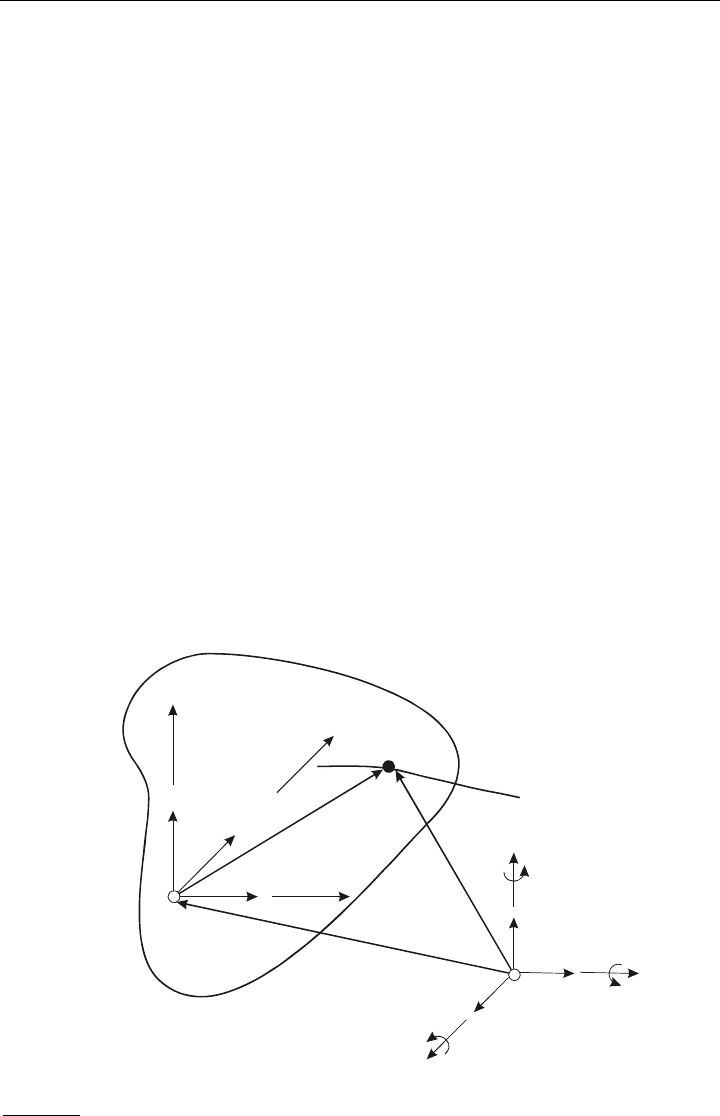
Im Bild 12.2 sind die Verhältnisse zwischen den Inertial- und Körperkoordinaten dargestellt,
und zwar für den Punkt P, der sich relativ bewegen soll. Hierin bezeichnen (s. auch /HEI
98/):
o
)KS( das Inertialsystem
*)
und
i
)KS( das Körpersystem;
i
O ein körperfester Bezugspunkt und P ein variabler Körperpunkt;
xo
e ,
yo
e ,
zo
e die Einheitsvektoren des
o
)KS(;
xi)o(
e
,
yi)o(
e
,
zi)o(
e
die Einheitsvektoren des körperfesten
i
)KS(
, dargestellt im
o
)KS(;
der Ortsvektor im Inertialsystem
o
)KS(
zoyoxop)o(
zyx eeer ; (12.1)
*)
Anmerkung: Inertialsystem = beschleunigungsfreies Koordinatensystem
12 Mehrkörpersysteme
282
der Ortsvektor im Körpersystem
i
)KS(
ziyixip)i(
zvu eeer . (12.2)
Die Koordinaten der Einheitsvektoren sind durch die Richtungskosinusse gegeben. Fasst
man diese Koordinaten zu einer Matrix zusammen, so erhält man die Transformationsmatrix
(siehe T in Kapitel 5.4.1), die innerhalb der MKS auch mit Rotations- oder Drehmatrix (R)
benannt wird:
»
¼
º
«
¬
ª
{
zi)o(yi)o(xi)o((OK)
,, eeeRR , (12.3)
sie beschreibt die Orientierung des
i
)KS(
bezüglich des
o
)KS(.
Wie früher schon bewiesen, ist die Transformationsmatrix orthogonal, d. h., es gilt
I
R
R
t
, (12.4)
hieraus folgt auch für die inverse Rotationsmatrix
R
R
R
t-1
. (12.5)
Die Bedeutung dieser Beziehung ist vor allem darin zu sehen, dass die Inversion einfach auf
die Transposition zurückzuführen ist.
Körper i
x
y
z
P
0
KS
)(
i
O
w,z
R
w,y
R
i
)KS(
zi)o(
e
yi)o(
e
p)i(op)o(
.bzw
rr
xi)o(
e
u,x
R
o
)o(
r
p
)o(
r
xo
e
yo
e
zo
e
x
I
y
I
z
I
Bahnkurve von P
Bild 12.2: Inertial- und Körperkoordinaten bzw. -systeme als Rechtssysteme
12.2 Kinematik von MKS
283
Weiterhin lässt sich in der Kinematik eine allgemeine Bewegung des Punktes P als die Über-
lagerung einer Translation und einer Rotation ausführen. In dem vorstehenden Bild ergibt
sich für
p)i(io)o(op)o(
rRrr
. (12.6)
Die Gleichung stellt also eine Koordinatentransformation
oi
)KS()KS( o dar.
12.2.1 Drehmatrix
In den vorstehenden Skizzen sind schon rechtsdrehende Körper-Koordinatensysteme
K
KS)(
eingeführt worden. Als Zusammenhang (s. Bild 12.3) kann zwischen den Koordinaten des
Punktes P im Inertialsystem und im gedrehten Koordinatensystem bei einer Drehung um die
x-Achse angegeben werden:
»
»
»
¼
º
«
«
«
¬
ª
»
»
»
¼
º
«
«
«
¬
ª
»
»
»
¼
º
«
«
«
¬
ª
w
v
u
ijcosijsin0
ijsinijcos0
001
z
y
x
)K(
xx
xx
(K))o(
(12.7)
bzw.
P)R(xx)K(P)o(
rRr
I , mit
xx)K(
I
RR .
z
w
y
P
u
x
I
z
w
P
u
P)o(
r
x
I
z
K
z
K
y
K
x
ˆ
x
In analoger Weise findet sich die Drehmatrix für die Elementardrehungen um die y- und z-
Achse:
»
»
»
¼
º
«
«
«
¬
ª
II
II
I
yy
yy
yy
cos0sin
010
sin0cos
R , (12.8)
»
»
»
¼
º
«
«
«
¬
ª
II
II
I
100
0cossin
0sincos
zz
zz
zz
R . (12.9)
Bild 12.3:
Elementardrehung um die x-Achse mit dem
Körperpunkt P um den Winkel
x
I

12 Mehrkörpersysteme
284
Zusammengesetzte Dehnungen können jetzt in einfacher Weise aus drei nacheinander ausge-
führten Elementardrehungen gebildet werden. Von den vielen Möglichkeiten, diese auszu-
führen, haben praktisch nur die Kardan- und die Euler-Winkel größere Bedeutung erlangt:
x Drehung um die Kardan-Winkel
1. Rotation um die x-Achse
xx
I
R ,
2. Rotation um die neue y-Achse
yy
I
R ,
3. Rotation um die neue z-Achse
zz
IR
,
daraus folgt:
P)K(zyxKARDP)K(zzyyxxP)o(
,, rRrRRRr
{{
III
I
I
I . (12.10)
Führt man die Matrizenmultiplikation durch, so folgt für die Kardan’sche Drehmatrix
»
»
»
¼
º
«
«
«
¬
ª
yxzyxyxzyxzx
yxzyxzxzyxzx
yzyzy
KARD
ccssccscscss
csssscccsssc
ssccc
R . (12.11)
Als Abkürzungen wurden benutzt:
zzxx
cosc,sins I I
usw.
x Drehung um die Euler-Winkel
Gemäß Vereinbarung müssen hier die Elementardrehungen nacheinander um die z-, x-
und wieder z-Achse ausgeführt werden. Die Drehmatrix für Euler-Winkel lautet so:
zzyxxzzyxEUL
,,
I
I
I III RRRR (12.12)
bzw.
»
»
»
¼
º
«
«
«
¬
ª
yzyzy
yxzxzyxzxzyx
yxzxzyxzxzyx
EUL
ccsss
scssccccsscc
ssscccsccscs
R . (12.13)
Besonders anzumerken ist, dass die Matrizenprodukte in Gl. (12.10) und Gl. (12.13) nicht
kommutativ sind. Eine andere Reihenfolge der Multiplikation führt zu einem anderen Ergeb-
nis, d. h., die Orientierung des Körpers ist anders.
12.2 Kinematik von MKS
285
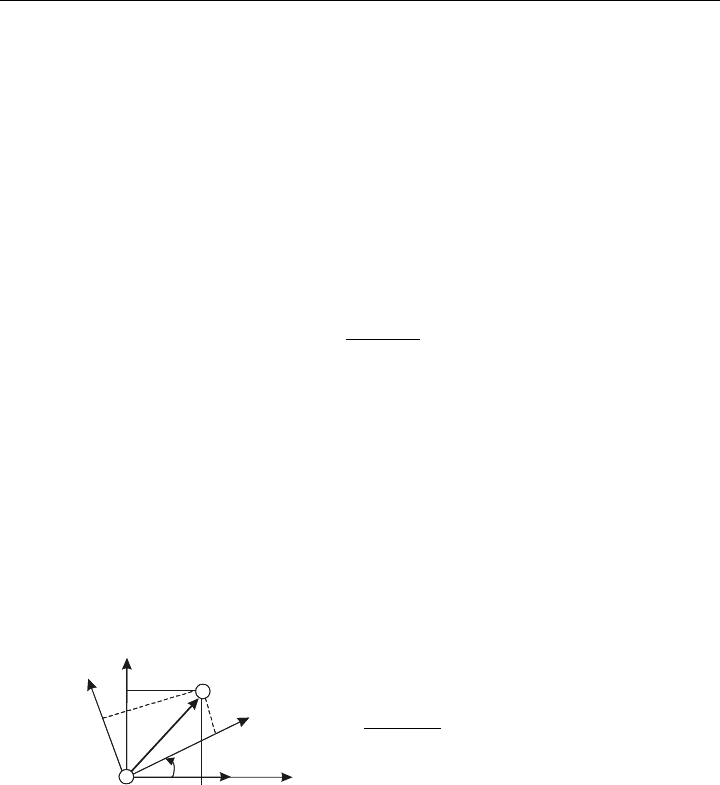
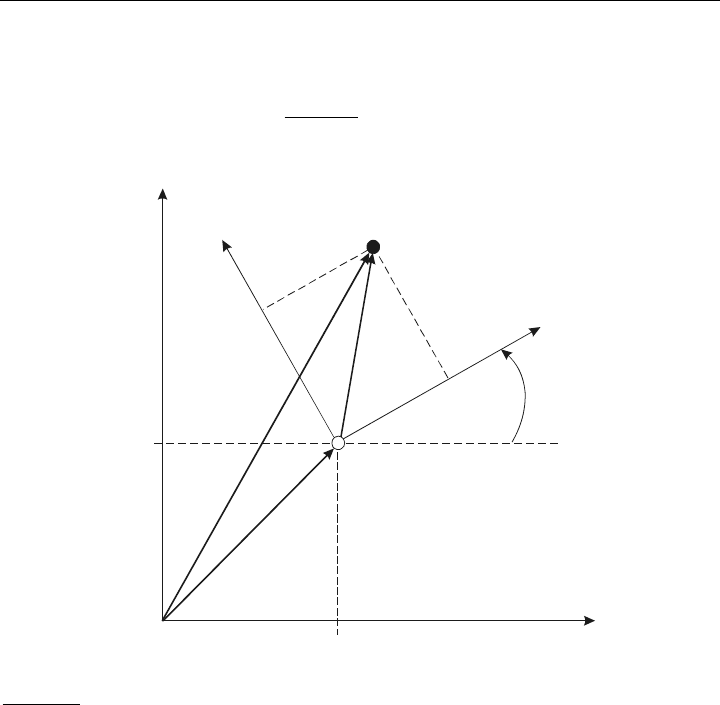
12.2.2 Ebene Bewegung
Um die Problematik mit einfacher Darstellung weitertreiben zu können, wollen wir uns auf
einen ebenen Fall beschränken. Im Bild 12.4
ist die ebene Bewegung charakterisiert, ohne
Einschränkung der Allgemeinheit gilt hier z = 0.
y
0
v
u
x
o
y
P(x, y)
o
x
o)o(
r
P)K(
r
z
I
z
P)o(
r
K
x
K
)KS(
o
)KS(
K
y
Bild 12.4: Verhältnisse bei der ebenen Bewegung
Die Bewegung lässt sich jetzt in der x-, y-Ebene eindeutig beschreiben, und zwar durch
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
v
u
und
y
x
,
y
x
P)K(
o
o
o)o(P)o(
rrr .
Eine Drehung kann somit nur noch um die z-Achse erfolgen und ist eindeutig durch die
Drehmatrix
»
¼
º
«
¬
ª
II
II
I
zz
zz
zz
cossin
sincos
R (12.14)
gegeben.
Eine
allgemeine Lage lässt sich nunmehr angeben durch

12 Mehrkörpersysteme
286
P)K(zo)o(P)o(
rRrr , (12.15)
welches in Koordinaten
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
II
II
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
v
u
cossin
sincos
y
x
y
x
zz
zz
o
o
(12.16)
entspricht.
Die
Geschwindigkeit erhält man bekanntlich durch Differenziation nach der Zeit. Es ergibt
sich
P)K(zP)K(zo)o(P)o(
rRrRrr
. (12.17)
Um die Matrizenkooperationen ausführen zu können, wollen wir in einer Zwischenbetrach-
tung die Drehmatrix kurz ableiteten:
z
zz
zz
z
z
zz
zz
sincos
cossin
I
»
¼
º
«
¬
ª
II
II
{I
Iw
Iw
I
R
R . (12.18)
Auch die Entwicklung von Gl. (12.17) ist etwas mühsam, weshalb die Ausrechnung hier
verkürzt werden soll. Zunächst kann geschrieben werden:
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
II
II
»
¼
º
«
¬
ª
I
I
»
¼
º
«
¬
ª
II
II
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
v
u
cossin
sincos
v
u
sincos
cossin
y
x
y
x
zz
zz
z
z
zz
zz
o
o
. (12.19)
Führt man die Matrizenoperationen aus und fasst geeignet zusammen, so findet sich
»
¼
º
«
¬
ª
I
I
»
¼
º
«
¬
ª
II
II
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
z
z
zz
zz
o
o
uv
vu
cossin
sincos
y
x
y
x
. (12.20)
Für einen starren Körper ist insbesondere
0vu
, weshalb sich die Gleichung ent-
sprechend vereinfacht. Eine weitere Vereinfachung ergibt sich, wenn die Ausgangsgleichung
modifiziert wird. Aus Gl. (12.15) folgt auch
o)o(P)o(
t
zP)K(
r-rRr . (12.21)
Berücksichtigt man dies in Gl. (12.17) und setzt
0r
P
, so findet sich
o)o(P)o(
t
zzo)o(P)o(
r-rRRrr
. (12.22)
Das Matrizenprodukt ergibt

12.3 Kinetik von MKS
287
»
¼
º
«
¬
ª
I
I
»
¼
º
«
¬
ª
II
II
»
¼
º
«
¬
ª
II
II
I
0
0
cossin
sincos
sincos
cossin
z
z
zz
zz
zz
zz
z
t
zz
RR . (12.23)
Hierin ist
zz
Z I
, also die Winkelgeschwindigkeit. Endgültig erhält man so
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
Z
Z
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
o
o
z
z
o
o
yy
xx
0
0
y
x
y
x
. (12.24)
Ohne weitere Herleitungen ergibt sich für die Beschleunigung
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
I
I
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
I
I
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
o
o
z
z
o
o
z
z
o
o
yy
xx
0
0
yy
xx
0
0
y
x
y
x
. (12.25)
Wird weiterhin noch Gl. (12.24) zur Elimination von
o
xx
und
o
yy
herangezogen,
so kann letztlich die Endgleichung
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
ZD
DZ
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
o
o
2
zz
z
2
z
o
o
yy
xx
y
x
y
x
(12.26)
angegeben werden. Mit
zz
I D
ist dabei die Winkelbeschleunigung eingearbeitet worden.
12.3 Kinetik von MKS
Zum Aufgabenkreis der Kinetik gehört die Bewegung von massebehafteten Körpern unter
der Einwirkung von Kräften und Momenten. Die Kinetik verfolgt somit die Verknüpfung
von kinematischen Größen mit Kraftgrößen.
Die Beschreibung des Bewegungsverhaltens eines Starrkörpersystems mit n Freiheitsgraden
führt zu einem Satz von n gewöhnlichen DGLs 2. Ordnung, die bekanntlich gut lösbar sind.
Wir stoßen heute auf viele Fragestellungen, wo die Kinetik eine große Rolle spielt, wie bei-
spielsweise:
Simulation des Bewegungsverhaltens von Mechanismen unter der Einwirkung von Kräf-
ten;
Analyse von mechatronischen Strukturen bzw. Prototypen, um für bestimmte Bewe-
gungsabläufe die Antriebe zu dimensionieren,
sowie
Unterstützung beim Entwurf von Steuerungs- und Regelalgorithmen, um die erforder-
lichen Stellgrößen für vorgegebene Bahnkurven festzulegen.
Zur Lösung kinetischer Probleme können zwei grundverschiedene Vorgehensweisen heran-
gezogen werden: