Klein B. FEM: Grundlagen und Anwendungen der Finite-Element-Methode im Maschinen - und Fahrzeugbau
Подождите немного. Документ загружается.

9 FEM-Ansatz für dynamische Probleme 208
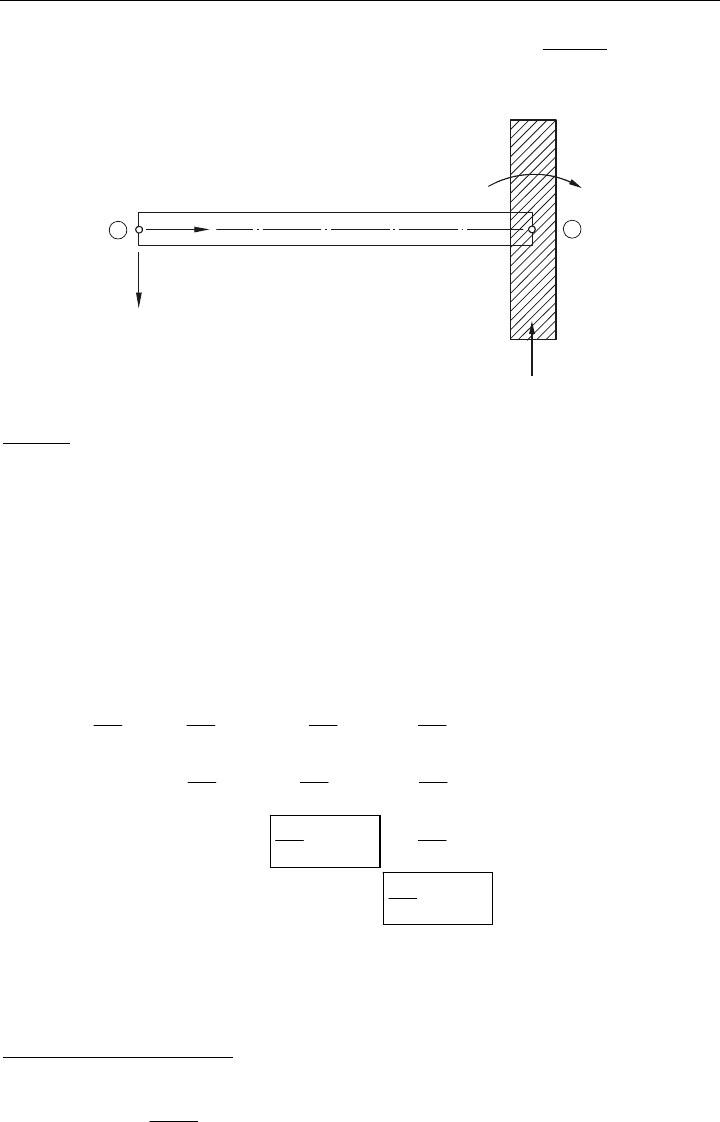
/KLE 77/. Ein typisches Beispiel für eine derartige Situation zeigt Bild 9.4
, welches bei-
spielsweise eine Ritzelwelle idealisiert.
1
x
z, w(t)
2
4\
..
M w
2
..
Bild 9.4:
Wirkung einer konzentrierten Einzelmasse an einem Balken-Element
Die Massenmatrix der Einzelmasse M
*)
kann als Diagonalmatrix
»
¼
º
«
¬
ª
4
0
0M
~
m
(9.18)
aufgefasst werden, welche so die translatorische und rotatorische Wirkung wiedergibt. Im
vorstehenden Fall ist diese Matrix dann mit der Massenmatrix des
Balken-Elements am
Knoten 2 zu überlagern, woraus folgt:
»
»
»
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
«
«
«
¬
ª
4P
PP
PPP
PPPP
3
2
323
22
L
420
4
sym
L
420
22
ML
420
156
L
420
3
L
420
13
L
420
4
L
420
13
L
420
54
L
420
22
L
420
156
.
m
ˆ
mit A
U
P
. (9.19)
Falls der Balken selbst noch schubweich ist, ist die Matrix noch um die entsprechenden
Terme der vorstehenden Beziehung zu ergänzen.
*)
Anmerkung: Massenträgheit einer Scheibe um die Längsachse
2
Rm
2
x
4
9.4 Eigenschwingungen ungedämpfter Systeme
209
9.2.3 Dreieck-Scheiben-Element
Auch zur Herleitung der Elementmassenmatrix des
Dreieck-Scheiben-Elements kann auf
bereits im Kapitel 7.2.2 dargestellte Zusammenhänge zurückgegriffen werden. Wir hatten
dort in Gl. (7.14) den Verschiebungsansatz hergeleitet zu
»
»
»
»
¼
º
«
«
«
«
¬
ª
»
»
¼
º
«
«
¬
ª
3
2
1
121331232
121331232
u
u
u
yyxyyxyyx
xxyxxyxxy
A2
1
y,xu . (9.20)
Es wurde weiter auch schon dargelegt, dass das
Dreieck-Element unter Verwendung von
Flächenkoordinaten einfacher zu behandeln ist.
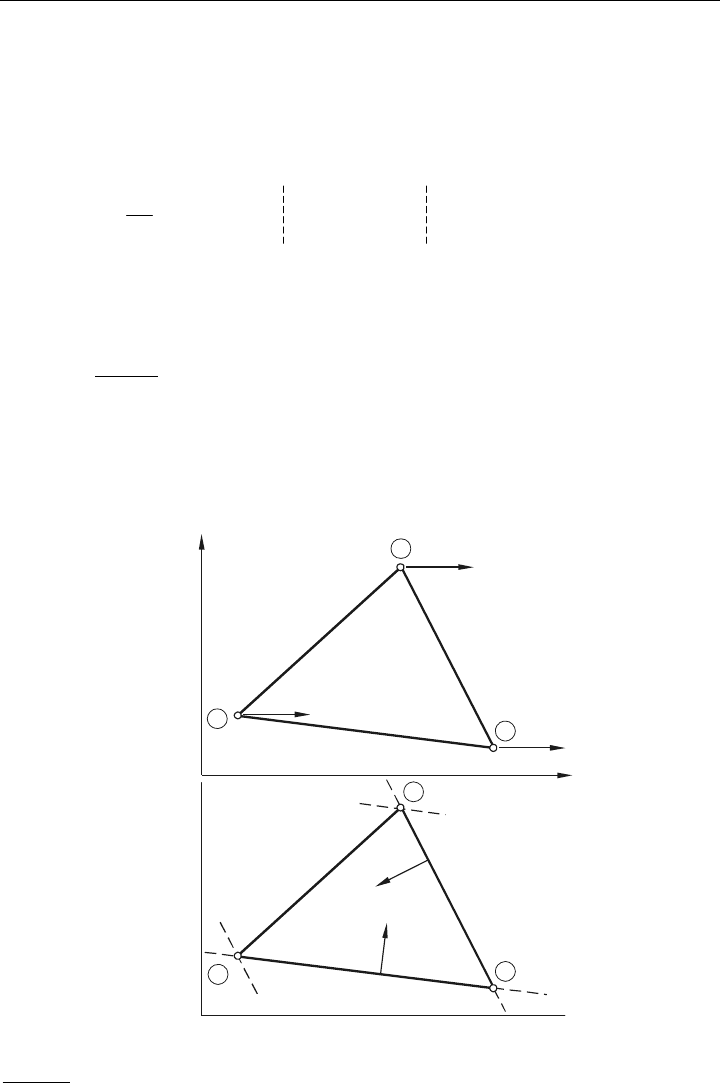
Für das im Bild 9.5
gezeigte Element kann folgende Beziehung zwischen den kartesischen
Koordinaten und den Flächenkoordinaten hergestellt werden:
3223111
3223111
yyyy
xxxx
]]
]
]
(9.21)
y
ü
3
ü
2
ü
1
2
3
1
x
2
3
1
]
2
]
1
]
1
= 1
]
2
= 1
]
1
= 0
b)
a)
Bild 9.5:
Dreieck-Scheiben-Element
a) dynamische Knotengrößen
b) Flächenkoordinaten
9 FEM-Ansatz für dynamische Probleme 210
Wird nun in der vorstehenden Gl. (9.20) die Variablen x und y durch eben diese Be-
ziehungen ersetzt, so wird ersichtlich, dass neue Ansatzfunktionen
>@
21211
t
11 ]]]]] G (9.22)
auftreten. Führt man ferner noch die in Gl. (7.36) über die Jacobi-Matrix hergestellte Trans-
formation ein, so lautet die an das
Dreieck-Element angepasste Berechnungsvorschrift Gl.
(9.7) jetzt
³³
]]U
1
0
1
0
21
t
dddett JGGm . (9.23)
Die Determinante der Jacobi-Matrix ist dabei gegeben als
.A2
yyxyxx
yxyx
)y,x(det
1
1322313213232231
1221
]
]]]]
]w
w
]w
w
]w
w
]w
w
J
(9.24)
Berücksichtigt man dies in Gl. (9.23) und führt die Integration durch, so erhält man getrennt
für die x- und y-Richtung als Elementmassenmatrix
)(
)(
0
0
m
Richtungy
Richtungx
211
121
112
211
121
112
12
tA
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
¬
ª
U
. (9.25)
Da bei der Programmierung der Elementsteifigkeitsmatrix meist aber eine andere Freiheits-
gradzuordnung gewählt wird, ist es erforderlich, die vorstehende Matrix noch umzusortieren.
Dies führt dann zu der Matrix
3
3
2
2
1
1
v
ü
v
ü
v
ü
201010
020101
102010
010201
101020
010102
12
tA
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
¬
ª
U
m . (9.26)
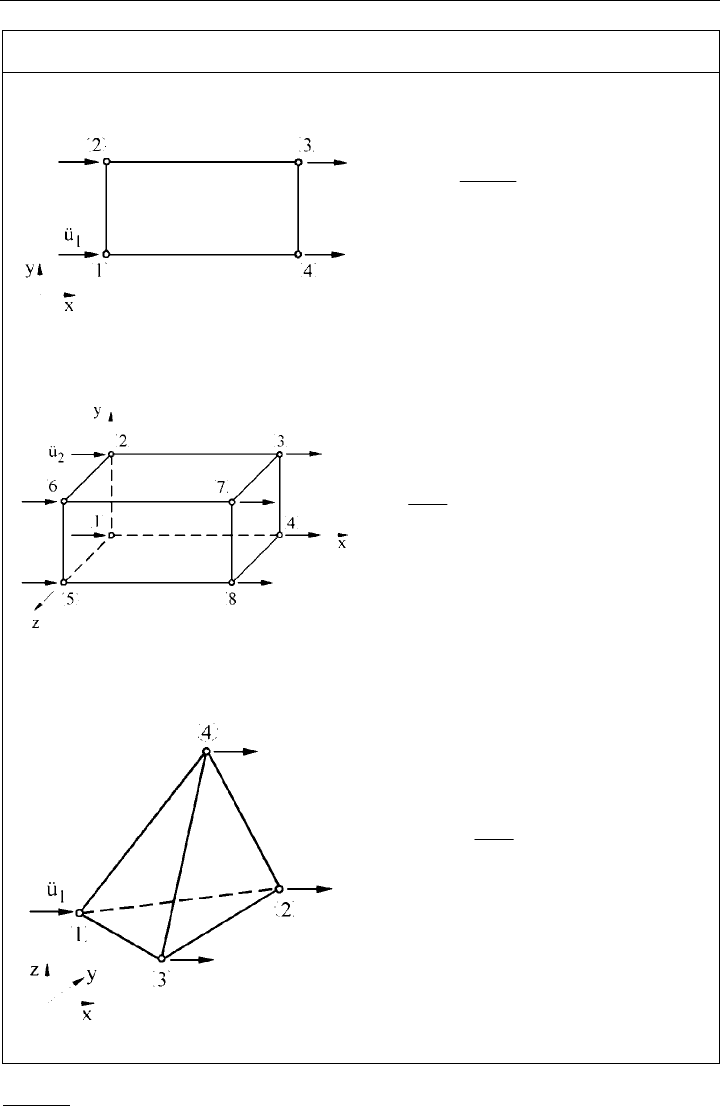
In Ergänzung zu den vorstehenden Massenmatrizen seien im Bild 9.6
noch einige Element-
massenmatrizen für eine Schwingungsrichtung angegeben.
9.4 Eigenschwingungen ungedämpfter Systeme
211
Element Massenmatrix
Rechteck-Scheiben-Element
»
»
»
»
¼
º
«
«
«
«
¬
ª
4212
2421
1242
2124
36
tAȡ
üüüü
4321
m
Quader-Volumen-Element
»
»
»
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
«
«
«
¬
ª
84244212
48422421
24841242
42482124
42128424
24214842
12422484
21244248
216
Vȡ
üüüüüüüü
87654321
m
Tetraeder-Volumen-Element
»
»
»
»
¼
º
«
«
«
«
¬
ª
2111
1211
1121
1112
20
Vȡ
üüüü
4321
m
Bild 9.6: Katalog einiger Elementmassenmatrizen für lineares Elementverhalten (nur x-
Richtung)
9 FEM-Ansatz für dynamische Probleme 212
9.3 Dämpfungsmatrizen
Die vorstehende Gl. (9.11) wurde unter der Voraussetzung aufgestellt, dass Dämpfung in
einer Struktur vorhanden ist und dass die Dämpfungsmatrix wie eine Massen- oder Steifig-
keitsmatrix zu bestimmen ist. Auf die dabei auftretenden Probleme wollen wir in diesem
Kapitel kurz eingehen. Zunächst gilt es zu klassifizieren, welche Dämpfungskräfte überhaupt
auftreten. Hierzu kann die folgende Einteilung gefunden werden mit
Struktur- oder Hysteresekräfte, die aus der inneren Materialreibung resultieren,
Coulomb‘sche Reibung an den Verbindungsstellen
und
viskose Dämpfung in gegebenenfalls angebrachte Tilger.
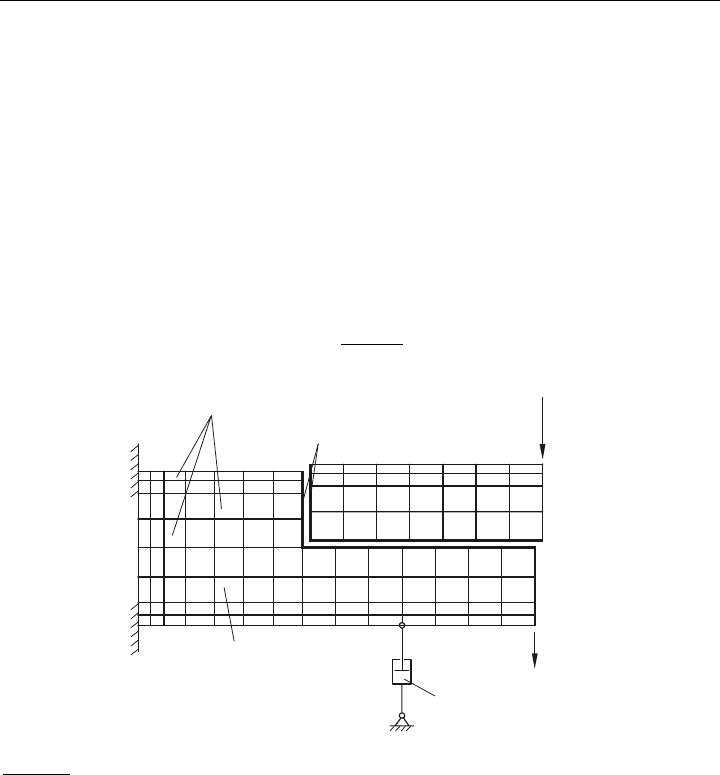
Prinzipiell sind diese drei Mechanismen im Bild 9.7
an einer Struktur angedeutet.
Scheiben
-Elemente
Kontakt
-Elemente
Struktur- oder
Hysteresedämpfung
F(t)
i
w(t)
j
J
w
k
.
.
viskose Dämpfung
Bild 9.7: Mechanische Substruktur mit Dämpfungselementen
Meist treten in größeren Strukturen alle drei Mechanismen zugleich auf. Im Sinne einer
möglichst einfachen Behandlung der Dämpfung und einer guten Lösbarkeit der DGL be-
schränkt man sich aber überwiegend nur auf die Berücksichtigung der viskosen Dämpfung.
Gegebenenfalls wird diese so angepasst, dass die viskose Dämpfung den gleichen Energie-
verzehr bewirkt, wie der eigentliche Dämpfungsmechanismus.
Soll nun in einer Berechnung die Dämpfung berücksichtigt werden, so hat man den Fall zu
unterscheiden, dass jedes Element einer quasi verteilten Dämpfung unterliegt oder eine
konzentrierte Dämpfung an einem Knoten wirksam wird. Für den ersten Fall haben wir mit
Gl. (9.8) bereits eine Vorschrift gefunden, wie man die Elementdämpfungsmatrix aufzu-
bauen hat. Wenden wir hierauf den Zusammenbaualgorithmus an, so ergibt sich mit
AAC
C
t
(9.27)

9.4 Eigenschwingungen ungedämpfter Systeme
213
die Strukturdämpfungsmatrix. Wirkt hingegen mit
k
w
J noch eine zusätzliche Dämp-
fungskraft, so ist dieser Dämpfungsanteil in die Diagonale der Matrix C auf den Platz (kk)
zu addieren.
Wie wir somit erkennen, ist der Einbau einer viskosen Dämpfung in den finiten Formalismus
ein leichtes Unterfangen. Der große Nachteil ist dabei, dass die Strukturdämpfungsmatrix C
keinen direkten Bezug mehr zur M- oder K-Matrix aufweist. Dies ist insofern problematisch,
da die so genannte Diagonalisierung von Gl. (9.11), welches einer Entkopplung der Schwin-
gungen gleichkommt, ein wichtiges Lösungsprinzip für die dynamische Strukturanalyse dar-
stellt. Man hat deshalb Abhilfe ersonnen, zu der beispielsweise die Annahme einer struktur-
proportionalen Dämpfung gehört. Vereinfacht setzt man hier die Dämpfungsmatrix als linear
abhängig von der Massen- und Steifigkeitsmatrix in der Form /ARG 88/
MKC ED (9.28)
an.
Der Vorteil dieser Vorgehensweise ist darin zu sehen, dass mit der Diagonalisierung von K
oder M, wie später gezeigt werden wird, auch die C-Matrix diagonalisiert wird. Für die
Parameter D und E sind entweder Erfahrungswerte einzusetzen oder geeignete Variationen
zu machen. In der Literatur werden für diese Parameter Größenordnungen von 2-5 % für
Strukturdämpfung
*)
, bis 8 % für Reibungsdämpfung bei Metallstrukturen und bis 20 % für
aktive Dämpfungselemente angegeben.
9.4 Eigenschwingungen ungedämpfter Systeme
9.4.1 Gleichungssystem
Im folgenden Kapitel wollen wir uns mit der Bestimmung der Eigenfrequenzen und Eigen-
vektoren (Modalanalyse) von ungedämpften Schwingungssystemen auseinandersetzen.
Diese Aufgabe ist insofern grundlegend, da bei den so genannten modalen Verfahren zur Er-
mittlung der dynamischen Antwort erzwungener Schwingungen die Eigenvektoren eine
grundlegende Rolle spielen. Des Weiteren geben uns auch die Eigenfrequenzen eine
wichtige Information über das Systemverhalten unter Anregung. Die Bewegungsgleichung
eines ungedämpften Schwingungssystems lautet:
0UKÜM . (9.29)
Dies ist vom Typ her eine homogene lineare DGL mit konstanten Koeffizienten, für die ge-
wöhnlich der Lösungsansatz
t
p
eXU
**)
(9.30)
*)
Anmerkung: Formel von Lehr für gedämpfte Eigenfrequenz Z[ Z
2
D
1 ([ = 0,02-0,05 bei Me-
tallen)
**)
Anmerkung zur Differenziation von Gl. (9.30): UXÜUXU
2
p
p
e
2
p,p
p
ep
tt
9 FEM-Ansatz für dynamische Probleme 214
herangezogen wird. Setzt man diesen in Gl. (9.29) ein, so wird die vorstehende DGL in das
algebraische Gleichungssystem
>@
0XKM
2
p (9.31)
überführt. Bei der Diskussion dieser Gleichung ist die triviale Lösung
X = 0 (Ruhezustand)
nicht weiter von Interesse. Nichttriviale Lösungen erhält man somit nur für die verschwin-
dende Koeffizientendeterminante
0pdet
2
KM . (9.32)
Die Entwicklung dieser Determinante als
0
kmp
kmpkmp
kmpkmpkmp
det
3333
2
2323
2
2222
2
1313
2
1212
2
1111
2
"
"
"
führt auf ein Polynom n-ten Grades in p
2
0bpbpb
o
1n
2
1n
n
2
n
" , (9.33)
welches als charakteristische Gleichung bezeichnet wird. Diese Gleichung hat n von null
verschiedene Lösungen in p
2
. Aus jeder Lösung kann noch die Wurzel r p
2
gezogen wer-
den, sodass letztlich 2 n-Lösungen in p vorliegen.
Um den Aufbau der charakteristischen Gleichung etwas besser verstehen zu können, wollen
wir diese einmal für einen 2-Massen-Schwinger aufstellen. Ausgangsbeziehung ist hier die
Determinante
0
kmpkmp
kmpkmp
det
2222
2
2121
2
1212
2
1111
2
. (9.34)
Entwickelt man diese aus
0kmpkmpkmpkmp
1212
2
2121
2
2222
2
1111
2
und sortiert die Terme, so führt dies zu
.0kkkk
pkmkmkmkmpmmmm
12212211
2
2112122111222211
2
2
12212211
9.4 Eigenschwingungen ungedämpfter Systeme
215
Überträgt man nun diese Aussage auf einen Schwinger mit beliebig vielen Freiheitsgraden,
so ist mit Rückblick auf Gl. (9.32) folgender Zusammenhang
KM detb,detb
on
zu erkennen. Um weitere Erkenntnisse über den Charakter der Lösung
2
p zu gewinnen,
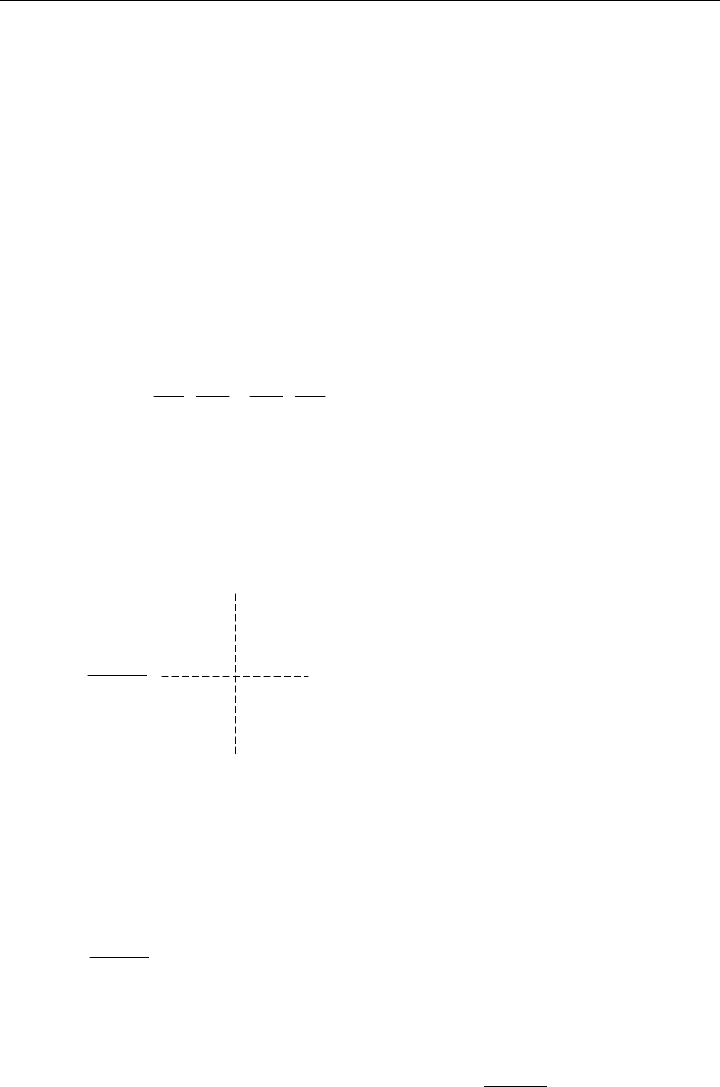
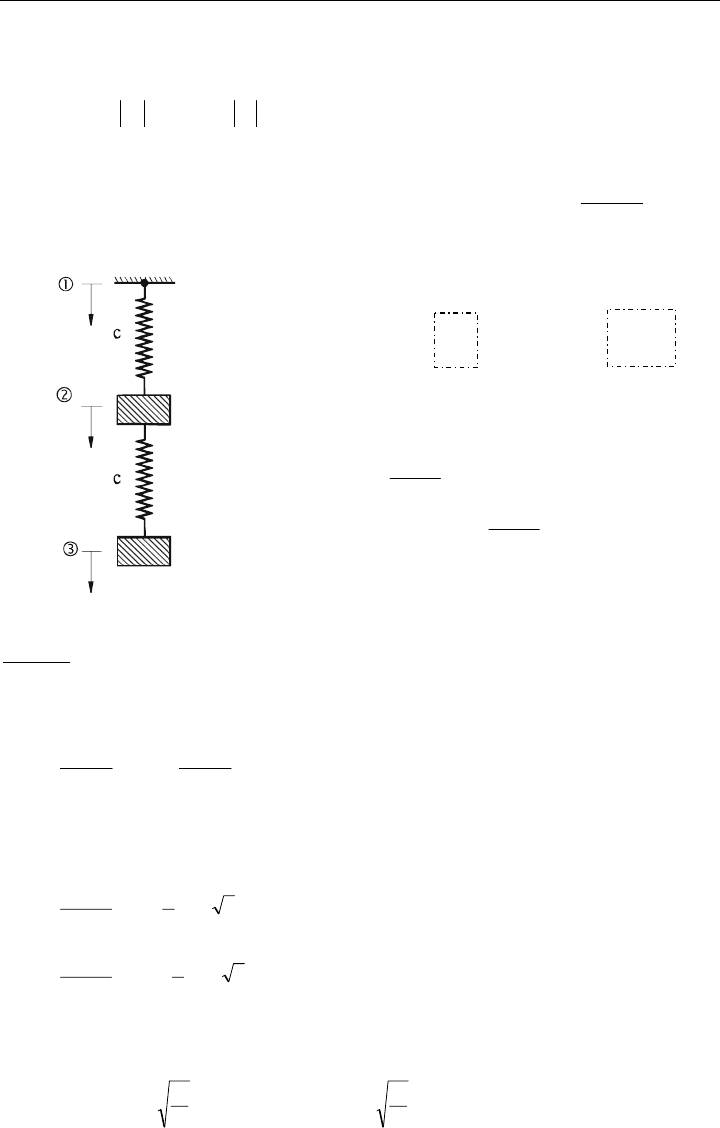
wollen wir die konventionelle Bearbeitung eines 2-Massen-Schwingers (s. Bild 9.8
) hier ein-
mal einschieben. Für diesen gelten die folgenden Beziehungen:
2
u
3
u
m
m
0u
1
Bild 9.8:
Diskreter 2-Masse-Schwinger
Gemäß der Problemformulierung kann dann die charakteristische Gleichung
01
c
mp
3
c
mp
2
2
2
¸
¸
¹
·
¨
¨
©
§
¸
¸
¹
·
¨
¨
©
§
(9.35)
erstellt werden. Die beiden Lösungen dieser quadratischen Gleichung in
2
p sind
,62,253
2
1
c
mp
,38,053
2
1
c
mp
II
2
I
2
¸
¸
¹
·
¨
¨
©
§
¸
¸
¹
·
¨
¨
©
§
(9.36)
woraus vier Lösungen folgen, und zwar
pi
c
m
pi
c
m
II
062 062, , , , (9.37)
»
»
»
¼
º
«
«
«
¬
ª
100
010
000
mM,
»
»
»
¼
º
«
«
«
¬
ª
110
121
011
cK
>@
21
t
uu U
»
»
»
¼
º
«
«
«
¬
ª
»
»
»
¼
º
«
«
«
¬
ª
»
»
»
»
¼
º
«
«
«
«
¬
ª
0
0
x
x
1
c
mp
1
12
c
mp
2
1
2
2
9 FEM-Ansatz für dynamische Probleme 216
pi
c
m
pi
c
m
II II
162 162,, ,. (9.38)
Die Lösungen von Gl. (9.36) gilt es jetzt in die Gl. (9.31) einzusetzen und auf
1x
1
zu
normieren. Man erhält so für die erste Lösung
»
»
¼
º
«
«
¬
ª
»
»
¼
º
«
«
¬
ª
»
»
»
»
¼
º
«
«
«
«
¬
ª
0
0
x
1x
2
5
2
1
1
1
2
5
2
1
2
1
. (9.39)
Aus der 2. Zeile erhält man dann
0x5112
2
oder
51
2
1
x1x
21
,
und als Eigenvektor
»
¼
º
«
¬
ª
51
2
1
1
t
I
x
. (9.40)
Setzt man weiter die zweite Lösung ein und entwickelt die Gleichung, so erhält man
51
2
1
x,1x
21
bzw. für den zweiten Eigenvektor
»
¼
º
«
¬
ª
51
2
1
1
t
II
x
. (9.41)
Die Kernaussage, die wir hieraus gewinnen, ist: Die Lösungen in
2
p der charakteristischen
Gleichung sind stets negativ reell, hingegen sind die Lösungen
p
i
paarweise rein imaginär.
Für die Eigenvektoren
I,II
x gilt, dass sie immer reell sind /ARG 88/.
Um diese Aussage für beliebige Schwinger zu belegen, wollen wir für einen Eigenvektor den
komplexen Aufbau
iii
i bax (9.42)
und für den anderen den konjugiert komplexen Aufbau

9.4 Eigenschwingungen ungedämpfter Systeme
217
t
i
t
i
t
i
i
ˆ
bax (9.43)
annehmen. Damit kann Gl. (9.31) geschrieben werden als
0xKxxMx
i
t
ii
t
i
2
i
ˆˆ
p . (9.44)
Formuliert man diese Gleichung aus, so führt dies zu
.i
ip
i
t
ii
t
ii
t
ii
t
i
i
t
ii
t
ii
t
ii
t
i
2
i
0bKaaKbbKbaKa
bMaaMbbMbaMa
»
¼
º
«
¬
ª
¸
¹
·
¨
©
§
»
¼
º
«
¬
ª
¸
¹
·
¨
©
§
(9.45)
Da in den hier betrachteten Fällen die Massen-(
M)- und Steifigkeitsmatrix (K) immer sym-
metrisch und positiv definit sein soll, verschwinden in der vorstehenden Gl. (9.45) die Ima-
ginärteile, sodass nur die reellen Anteile übrig bleiben. Die Lösung /OLS 72/ von
1
i
t
ii
t
i
2
i
2
2
i
ˆˆ
ip
¸
¹
·
¨
©
§
¸
¹
·
¨
©
§
Z{
xMxxKx (Rayleigh-Quotient) (9.46)
ist damit negativ reell bzw. die Lösungen
iiii+
Ȧip,Ȧip
*)
sind rein imaginär. Somit können die Eigenkreisfrequenzen („Modes“) formal bestimmt wer-
den zu
0
ˆˆ
1
i
t
ii
t
i
2
i
!
¸
¹
·
¨
©
§
¸
¹
·
¨
©
§
Z
xMxxKx . (9.47)
Die Frequenzen, also die Anzahl der Schwingungen pro Sekunde, erhält man dann zu
ʌ2
Ȧ
Ȟ
i
i
. (9.48)
Des Weiteren wollen wir die wichtige Eigenschaft der Eigenvektoren diskutieren, dass sie
konsistente Massenmatrizen und Steifigkeitsmatrizen simultan diagonalisieren. Um dies zu
belegen, fassen wir alle möglichen Eigenvektoren in die Matrizengleichung
>@
>@
2
n
2
2
2
1
n21
n2
1
111
ZZZ
""" xxxKxxxM (9.49)
*)
Anmerkung: Hinweis: imaginäre Einheit i, Regeln: i
2
= -1, i
3
= -i, i
4
= +1, daher p
2
= - Z
2