Klein B. FEM: Grundlagen und Anwendungen der Finite-Element-Methode im Maschinen - und Fahrzeugbau
Подождите немного. Документ загружается.


8 Kontaktprobleme
188
8.3 Lösung zweidimensionaler Kontaktprobleme
8.3.1 Iterative Lösung nichtlinearer Probleme ohne Kontakt
Die allgemeine Lösung des Kontaktproblems ist nur iterativ möglich. Im nichtlinearen stati-
schen Fall ohne Kontakt gilt für den beliebigen Zeitpunkt
t die Gleichgewichtsgleichung
0UFP )(
tt
. (8.8)
Hierin ist
P
t
der Vektor der äußeren Knotenpunktkräfte,
F
t
der zu den inneren Elementspannungen äquivalente Knotenpunktkraftvektor,
U
t
der Vektor der Knotenpunktverschiebungen.
Angenommen sei jetzt, dass die Lösung
U
t
bereits bekannt ist und die Lösung
U
tt '
zum
Zeitpunkt
tt ' gesucht sei. Der Vektor der äußeren Knotenpunktlasten P
tt '
sei eben-
falls bekannt. Die Gl. (8.8) ist zudem für alle Zeitpunkte
tt '
gültig:
0UFP
''
)(
tttt
. (8.9)
Mit der Definition
)(:)( UFPU
tttttt '''
) (8.10)
kann die Beziehung (8.9) auch verkürzt als
0)Uĭ(
' tt
(8.11)
angegeben werden. Die exakte Lösung U
tt '
erfüllt die Gl. (8.11) exakt. Eine i-te Nähe-
rungslösung
i
U
tt '
kann die Gleichung jedoch nur näherungsweise befriedigen. Nun sei
unterstellt, dass eine weitere Näherungslösung
1i'
U
tt
ebenfalls bekannt sei. Dann lie-
fert eine Linearisierung um den Arbeitspunkt mittels der Taylor-Reihenentwicklung die
Näherungsgleichung
1i(i)
1i
1i(i)
''
'
''
w
w
| UU
U
ĭ
UĭUĭ
U
tttt
tt
tttt
. (8.12)
Für die partielle Ableitung in Gl. (8.12) erhält man aus Gl. (8.10)
UK
U
F
U
ĭ
T
w
w
w
w
. (8.13)

8.3 Lösung zweidimensionaler Kontaktprobleme
189
Die partielle Ableitung des Vektors der elastischen Rückstellkräfte
F (der äquivalent zu den
inneren Elementspannungen ist) nach dem Verschiebungsvektor ergibt die so genannte Tan-
gentensteifigkeitsmatrix
T
K
. Das Einsetzen von Gl. (8.10) und Gl. (8.13) in Gl. (8.12) lie-
fert dann
0UUUKUFP |
''
'
'' 1ii
1i
T
1i
tttttttttt
. (8.14)
Wird Gl. (8.14) identisch null gesetzt, so erhält man für den gesuchten Verschiebungsvektor
eine verbesserte Näherungslösung
i
U
tt '
:
1i
1i1
T
1i(i)
)(
''
'''
UFPUKUU
tttttttttt
. (8.15)
Mit der Abkürzung
1iii
:
''
' UUU
tttt
kann man schließlich die allgemeine
Iterationsvorschrift nach
Newton-Raphson
*)
aufstellen:
0UUKUFP '
'
'' (i)
1i
T
1i
tttttt
bzw. (8.16)
.
1ii
1i
T
1i
'
''
' ' RUUKUFP
tttttt
Die Iteration ist dann so lange durchzuführen, bis die Verschiebungsinkremente
i
U' oder
der „Out-of-balance“-Lastvektor
1i
'
R
hinreichend klein sind. Da vom berechneten Zeit-
punkt
t ausgegangen wird und der Zeitpunkt
tt '
berechnet werden soll, können wegen
der anzunehmenden Stetigkeit der Lösungsfunktion über die Zeit als Startwerte die Ergeb-
nisse des Zeitpunkts
t verwendet werden:
FF,UU
tttttt
''
0
0
. (8.17)
8.3.2 Iterative Lösung mit Kontakt
Jetzt sei davon ausgegangen, dass zum Zeitpunkt tt '
Kontakt auftritt. Dann erhält man
ganz analog zu Gl. (8.2) das allgemeine nichtlineare Gleichungssystem des Kontaktproblems
0ȜNUFP
'''' tttttttt t
(8.18)
mit den Nebenbedingungen
ǻȜN
tttttt '''
. (8.19)
N
tt '
ergibt sich als Matrix aus den noch herzuleitenden geometrischen Kontaktbedin-
gungen.
*)
Anmerkung: Lösungsverfahren für nichtlineare Gleichungssysteme mit guter Konvergenz
8 Kontaktprobleme
190
Ȝ
tt '
ist der Vektor der Kontakt-Knotenpunktkräfte des Kontaktkörpers.
und
ǻ
tt '
ist der Vektor der Materialüberlappungen, die es zu beseitigen gilt.
Das Gleichungssystem aus den Gl. (8.18) und (8.19) ist nur iterativ lösbar. Analog zu Gl.
(8.10) definiert man
0ȜNUFP:Ȝ,Uĭ
''''' tttttttttt t
. (8.20)
Hier sei bemerkt, dass neben den unbekannten Verschiebungen
U
tt '
auch die unbekann-
ten Kontakt-Knotenpunktkräfte
Ȝ
tt '
des Kontaktkörpers auftreten. Deshalb ist hier eine
Linearisierung sowohl über die unbekannten Verschiebungen als auch über die unbekannten
Kontakt-Knotenpunktkräfte durchzuführen:
.0ȜȜ
Ȝ
ĭ
UU
U
ĭ
,UĭȜ,Uĭ
Ȝ
U
|
w
w
w
w
''
'
'
'
'
''
1i
)1(i
1i
)1(i
1i
tttt
tt
tt
tt
tt
tttt
OO
(8.21)
Mit den partiellen Ableitungen
t
T
N
Ȝ
ĭ
,UK
U
ĭ
w
w
w
w
(8.22)
und den Abkürzungen
1iǻiǻi
,1iǻiǻi
ǻ
ǻ
ȜȜ:Ȝ
UU:U
tttt
tttt
(8.23)
folgt aus Gl. (8.21) schließlich das Gleichungssystem zur Bestimmung der unbekannten Ver-
schiebungen und Kontakt-Knotenpunktkräfte:
0ȜNUUKȜNUFP
Ȝ,Uĭ
''
'
'''
''
'
i1i-t,i
1i
T
1i1i-t,
1i
i
tttttttttttt
tt
i1i-t,i
1i
T
1i1i-t,
1i
ȜNUUKȜNUFP ''
'
'''
'' tttttttttttt
(8.24)
8.3 Lösung zweidimensionaler Kontaktprobleme
191
Mit der Abkürzung
1i1i-t,
1i
c
''
'
ȜNR
tttttt
und der Gl. (8.19) lautet das
bestimmende Gleichungssystem für Kontaktprobleme /BAT 85; BAT 87; BAT 86b/:
»
»
¼
º
«
«
¬
ª
»
»
¼
º
«
«
¬
ª
'
'
»
»
¼
º
«
«
¬
ª
'
'
''
'
'
'
)1(i
1i
c
1i
i
i
1i
1i-t,
1i
T
ǻ
RUFP
Ȝ
U
0N
NUK
tt
tttttt
tt
tttt
1i
c
i
1i
t
T
'
'
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
'
'
»
¼
º
«
¬
ª
ǻ
RUFP
Ȝ
U
0N
NUK
tt
tt
. (8.25)
Der Vektor
1i
c
'
R
tt
enthält alle Kontakt-Knotenpunktkräfte sowohl des Kontaktkörpers
als auch des Zielkörpers der aktuellen Kontaktzone.
Als Konvergenzbedingung für Gl. (8.25) gelten mit
i o
f
die beiden Forderungen
0ǻ o
' 1itt
(8.26)
und aus Gl. (8.18)
o '
''
'
1i
c
1i
1i
: RPUFR
tttttt
0,
R
1i-
c,k
tt '
(8.27)
d. h., es wird solange iteriert, bis die Materialüberlappung
1i'
ǻ
tt
beseitigt ist und der
Out-of-balance-Vektor
1i
'
R
für alle nicht in Kontakt stehenden Knoten verschwindet.
Dann enthält der
Out-of-balance-Vektor für die im Kontakt befindlichen Knoten die Kon-
takt-Knotenpunktkräfte.
Unbekannt ist noch die Matrix der Kontaktbedingungen
1i'
N
tt
, die es aus geometri-
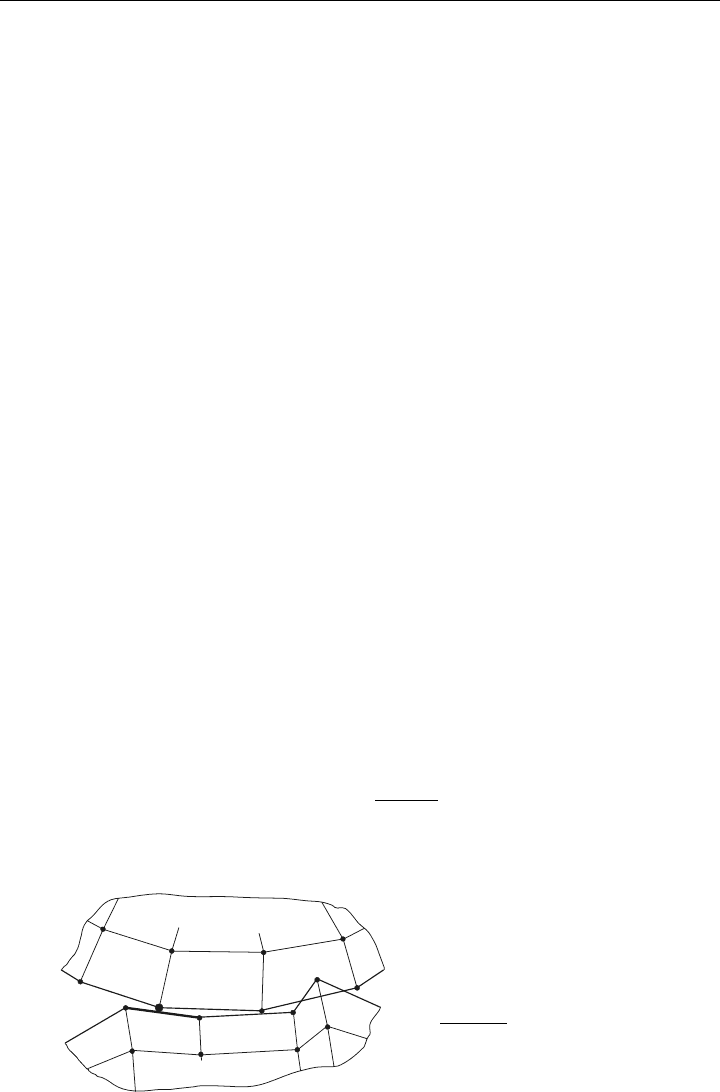
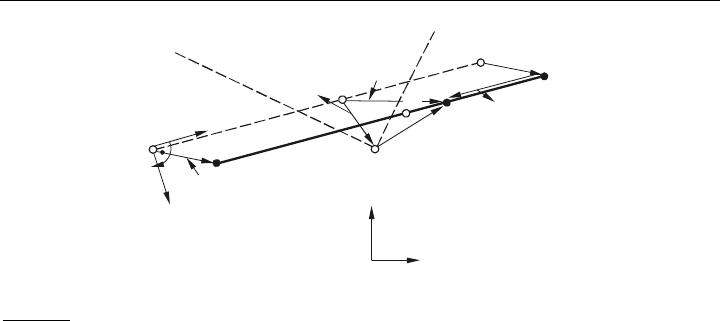
schen Betrachtungen heraus zu bestimmen gilt. Bild 8.4
zeigt eine aus finiten Scheiben-Ele-
menten und Kontaktelementen modellierte zweidimensionale Kontaktregion.
Kontaktkörper
Zielkörper
k-1
j
J
j+1
k
K
k+1
Bild 8.4:
Finite Element-Diskretisierung in
Kontaktregion
für alle im Kontakt befind-
lichen Knoten k
für alle restlichen Knoten

8 Kontaktprobleme
192
Zur Bestimmung der Kontaktbedingungen genügt die Betrachtung eines Knotens k aus dem
Kontaktkörper und eines Segments J aus dem Zielkörper. Die Matrix
1i '
N
tt
wird aus
den Kontaktbedingungen aller lokalen Kontaktelemente zusammengesetzt. Auf diese Weise
ist es möglich, für die einzelnen Kontaktelemente unterschiedliche Kontaktbedingungen zu
berücksichtigen. Während sich z. B. ein Kontaktelement im Haftzustand befindet, kann das
benachbarte Element sich im Gleitzustand befinden oder nicht in Kontakt sein. Es ist beim
Zusammenbau von
1i '
N
tt
für jedes Kontaktelement einzeln zu entscheiden, welche der
drei Kontaktbedingungen (Haften, Gleiten oder kein Kontakt) für ein Kontaktelement zu
verwenden ist.
1. Fall:
Kein Kontakt beim Iterationsschritt i
Das ist der einfachste Fall. Er tritt auf, wenn bei der Iteration i - 1 der Kontaktknoten k sich
im Zustand „Kein Kontakt“ befindet. Es wird dann zur Iteration i für das
lokale Kontakt-
element die Beziehung
0N
'
1i
J
tt
(8.28)
in die Matrix
1i '
N
tt
eingebaut. Besteht zwischen zwei Körpern kein Kontakt, so gilt
auch für die
globale Matrix
1i '
N
tt
= 0.
2. Fall:
Haften beim Iterationsschritt i
Haften zur Iteration i wird angenommen, wenn entweder der Kontaktknoten k bei der Ite-
ration i - 2 nicht in Kontakt ist und bei der Iteration i - 1 in den Zielkörper eindringt, oder
wenn die tangentiale Reibkraft bei der Iteration i - 1 die Haftgrenze nicht überschreitet und
der Kontaktknoten k sich beim Iterationsschritt i - 1 im Zustand „Haften“ befindet. Im ersten
Fall ist die Kontakt-Knotenpunktkraft
i
k
Ȝ
tt '
zu Beginn null und wird während der Itera-
tion i erzeugt. Haften wird demnach grundsätzlich zuerst angenommen, wenn ein Kontakt-
element vom kontaktfreien Zustand in den Kontaktzustand übergeht.
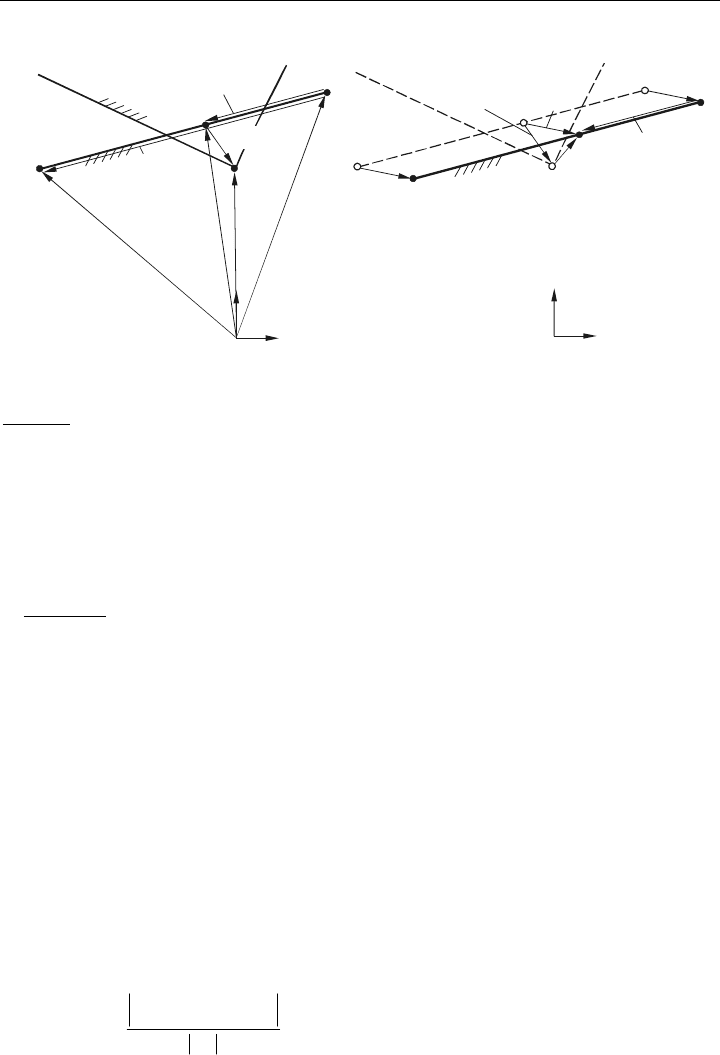
Bild 8.5 a)
zeigt den Ausgangszustand i - 1 vor dem durchzuführenden Iterationsschritt i.
Der Knoten k aus dem Kontaktkörper dringt in den Zielkörper ein und verursacht am nahe
liegenden Segment J die Überlappung
1i
k
'
ǻ
tt
. Dieser Zustand muss vom Computer-
algorithmus erkannt werden, sodass dann für den Iterationsschritt i die bestimmenden Glei-
chungen des Kontaktproblems aufgestellt und gelöst werden können. Die Hauptforderung
zur Bestimmung der Kontaktbedingungen lautet:
Alle Überlappungen entlang der aktuellen Kontaktoberfläche müssen nach der Iteration i
verschwinden!
Bild 8.5 b) zeigt den Verschiebungszustand nach der Iteration i. Das Segment J hat sich ge-
nauso verschoben wie der Kontaktknoten k. Die Überlappung
1i
k
'
ǻ
tt
wird zurückge-
schoben.
8.3 Lösung zweidimensionaler Kontaktprobleme
193
y
x
c
c
k
j+1
j
a)
y
x
k
j+1
j
b
)
ǻtt
ǻtt
ǻtt
1)(i
J
1i
J
E
d
1)(i
k
ǻ
1)(i
j
d
1)(i
c
x
1)(i
j
x
1)(i
k
x
1)(i
1j
x
1)(i
j
1)(i
k
A
dǻ
(i)
j
u
'
1)(i
k
ǻ
(i)
c
u
'
(i)
1j
'
u
(i)
J
(i)
J
d
E
(i)
k
u
'
Bild 8.5: Iterative Kontaktbedingung
a) Haftbedingungen vor Iteration i
b) Haftbedingungen nach Iteration i
Die vorausgesetzte Starrheit der finiten Kontaktelemente führt auf die Beziehung
J
1i
J
i
J
ddd
. (8.29)
In Bild 8.5 b)
ist der Zusammenhang
1i
k
i
k
i
c
'
' ' ǻuu
tt
(8.30)
ersichtlich. Hierin ist
E
J
i
ein dimensionsloser Parameter zur Lokalisierung der Kontakt-
stelle c am Segment J. Die Festlegung von
E
J
i
für das Segment J beim Iterationsschritt i
hängt davon ab, ob von Haften oder Gleiten auszugehen ist.
Beim Haften gilt:
EE
J
i
J
i
1
, (8.31)
d. h., der Kontaktpunkt k behält seine relative Position c im Segment J bei.
E
J
i1
folgt aus
geometrischer Betrachtung zu
J
1i
1j
1i
c
1i
J
d
xx
E
mit
1i
1j
1i
jJ
xxd . (8.32)

8 Kontaktprobleme
194
Wegen Gl. (8.29) besteht auch ein linearer Zusammenhang zwischen
i
j
u' ,
i
1j
'u und
i
c
u'
, und zwar
i
1j
1i
J
i
j
1i
J
i
c
1
'E'E ' uuu . (8.33)
Eliminierung von
1
c
u' in Gl. (8.33) mittels Gl. (8.30) ergibt
i
1j
1i
J
i
j
1i
J
1i
k
i
k
1ǻ
'
'E'E ' uuu
tt
i
1j
1i
J
i
j
1i
J
i
k
1i
k
ȕ1ǻ
'
'E'' uuu
tt
>@
»
»
»
»
¼
º
«
«
«
«
¬
ª
'
'
'
E
i
1j
i
j
i
k
1i
J
1i
J
1i
k
ǻ
ȕ1
u
u
u
IIIǻ
tt
, (8.34)
worin
I die Einheitsmatrix im zweidimensionalen Raum ist.
Im Haftfall lautet die gesuchte Matrix der Kontaktbedingungen
1i
J
'
N
tt
am betrachte-
ten Kontaktelement demnach:
>@
IIIN
'
1i
J
1i
J
1i
J
ßß1
tt
. (8.35)
Mit der Kontaktkraft
»
»
¼
º
«
«
¬
ª
O
O
'
'
'
1i
y,k
1i
x,k
1i
k
tt
tt
tt
!
Ȝ
am Kontaktknoten k findet man für
1i
k
1it,
J
1i
c,k
'
'
'
ȜNR
tttttt
bzw. im globalen x-, y-System
8.3 Lösung zweidimensionaler Kontaktprobleme
195
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
¬
ª
»
»
»
»
»
»
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
«
«
«
«
«
«
¬
ª
OE
OE
OE
OE
O
O
'
'
'
'
'
'
'
'
'
'
1i
1j
1i
j
1i
k
1i
ky
1i
J
1i
kx
1i
J
1i
ky
1i
J
1i
kx
1i
J
1i
ky
1i
kx
1i
c,k
1
1
Ȝ
Ȝ
Ȝ
R
,
,
,
,
,
,
tt
tt
tt
tt
tt
tt
tt
tt
tt
tt
. (8.36)
Hierin sind
1i
j
'
Ȝ
tt
und
1i
1j
'
Ȝ
tt
die Kontakt-Knotenpunktkräfte am Zielsegment
J. Es zeigt sich in Gl. (8.36), dass die Kontakt-Knotenpunktkraft
1i
k
'
Ȝ
tt
linear auf die
Zielknoten
1i
j
'
Ȝ
tt
und
1i
1j
'
Ȝ
tt
verteilt ist, d. h.,
1i
j
'
Ȝ
tt
,
1i
1j
'
Ȝ
tt
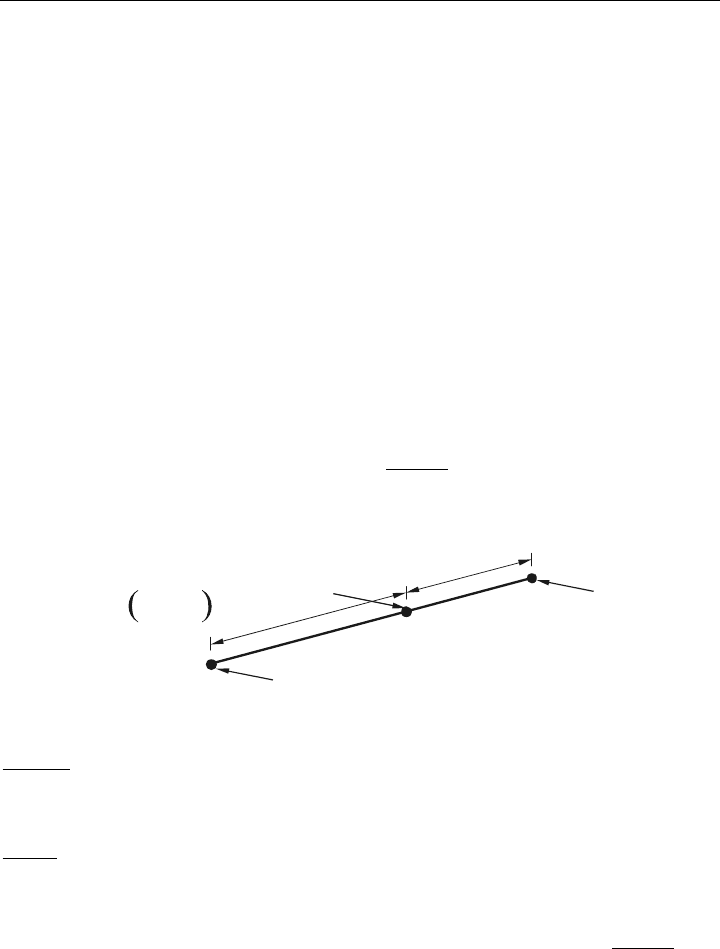
und
1i
k
'
Ȝ
tt
stehen im statischen Gleichgewicht. Bild 8.6 verdeutlicht diese Gegebenheit.
1i
j
1)(i
j
E
d
1i
1j
ǻ
Ȝ
tt
)1(i
j
ǻ
Ȝ
tt
)1(i
k
ǻ
Ȝ
tt
1)(i
j
1)(i
J
1
E
d
Bild 8.6:
Statisches Gleichgewicht der Kontakt-Knotenpunktkräfte
3. Fall:
Gleiten beim Iterationsschritt i
Überschreitet während der Iteration i - 1 die tangentiale Reibkraft die Haftgrenze, so ist der
Kontaktknoten k im Zustand „Gleiten“ und es wird auch zur Iteration i „Gleiten“ angenom-
men. Beim Gleiten bewegt sich der Kontaktpunkt c entlang des Segments J (s. Bild 8.7
). Der
Parameter
E
J
ändert sich während der Iteration i um
i
J
ȕ' zu
EE
J
i
J
i
J
i
1
'E . (8.37)
8 Kontaktprobleme
196
c
y
x
k
j+1
j
c
*
tt
ǻ
)i(
j
u
'
r
e
s
e
)i(
c
u
'
)1i(
k
ǻ
)i(
1j
'
u
)i(
j
)i(
j
d
E
)i(
k
u
'
Bild 8.7:
Gleitbedingungen vor und nach Iteration i
Der Kontaktpunkt k behält nicht die relative Position bei c
*
bei, sondern gleitet entsprechend
dem Parameter
i
j
ȕ' zum Punkt c. Die Gl. (8.30) ist deshalb nur für die Komponenten in
Richtung der Segmentflächennormalen
s
e zu erfüllen. Das Skalarprodukt der Vektoren aus
Gl. (8.30) mit dem Einheitsvektor
s
e führt auf die Komponentengleichung in Richtung von
s
e zu
1i
k
ǻ
i
k
t
s
i
c
t
s
ǻ
ǻueuǻe
tt
. (8.38)
Weiterhin gilt
i
1j
i
J
i
j
i
J
i
c
ßß1
'' ' uuu . (8.39)
Die Länge der Gleitstrecke ist a priori nicht bekannt und folglich auch nicht der Parameter
'E
J
i
. Mit der Annahme, dass
i
J
E' näherungsweise klein ist, ist auch hier Gl. (8.31) ver-
wendbar. Einsetzen von Gl. (8.31) und (8.39) in Gl. (8.38) liefert
>
@
i
k
i
1j
1i
J
i
j
1i
J
t
s
1i
k
t
s
ȕȕ1 uuueǻe '''
' tt
.
Mit
1i
kysy
1i
kxsx
1i
k
t
s
1i
k
ee
'
'
'
'
''
tttttttt
ǻeǻ
folgt
>@
»
»
»
»
¼
º
«
«
«
«
¬
ª
'
'
'
'
i
1j
i
j
i
k
t
s
1i
J
t
s
1i
J
t
s
1i
k
ȕȕ1
u
u
u
eeeǻ
tt
. (8.40)
8.3 Lösung zweidimensionaler Kontaktprobleme
197
Die gesuchte Matrix der Kontaktbedingungen
1i
J
'
N
tt
lautet also im Gleitfall:
>@
t
s
1i
J
t
s
1i
J
t
s
1i
J
1 eeeN EE
' tt
. (8.41)
Die Änderung der Kontaktkraft
i
k
Ȝ' ist im Gleitfall nur bezüglich der Komponente in
Normalenrichtung
s
e möglich.
Der tangentiale Anteil der Kontaktkraft ist wegen der Gleitbedingung
NdR
FȝF an die
Komponente in Normalenrichtung gekoppelt. Die Kontaktkraftänderung
i
k
Ȝ' reduziert
sich auf die Beziehung
s
i
k
i
k
eȜ ' O' . (8.42)
Im Gegensatz zum Haftfall (Gl. (8.34)), wo pro Kontaktknoten k jeweils zwei zusätzliche
Gleichungen hinzuzufügen sind, wird im Gleitfall (Gl. (8.40)) nur eine Gleichung pro Kon-
taktknoten hinzugefügt.
Damit sind die drei möglichen Fälle zur Bestimmung der Matrix der Nebenbedingungen er-
läutert. Der Zustand des Kontaktknotens k nach der Iteration i - 1 entscheidet, welcher der
drei obigen Fälle zur Iteration i der Matrix
1i'
N
tt
einzubauen ist. Es ist bisher aller-
dings offen, auf welche Weise der Zustand des Kontaktknotens zu bestimmen ist. Zur Fest-
legung des Zustandes eines Kontaktknotens dienen die Zustände der an den Knoten
angrenzenden Segmente. Im Bild 8.8
sind die verschiedenen Möglichkeiten aufgeführt.
Zustände der an k angrenzenden Segmente
ein angrenzendes Segment anderes angrenzendes Segment
Zustand von Knoten k
Haften Haften
Gleiten
kein Kontakt
Haften
Gleiten Gleiten
kein Kontakt
Gleiten
kein Kontakt kein Kontakt kein Kontakt
Bild 8.8:
Zustand eines Kontaktknotens
Der Zustand eines Kontaktsegments bestimmt sich mittels des Coulomb‘schen Reibungsge-
setzes aus den auf das Segment normal und tangential auf die Segmentfläche einwirkenden
Kräfte
F
N
i1
und
F
R
i1
infolge des Kontakts. Die auf die Kontaktsegmente einwirken-