Klein B. FEM: Grundlagen und Anwendungen der Finite-Element-Methode im Maschinen - und Fahrzeugbau
Подождите немного. Документ загружается.


7 Elementkatalog für elastostatische Probleme
178
>@
332211
t
wuwuwu d (7.178b)
für die drei Umfangskreise des Dreieck-Elementes bzw. für einen Knotenkreis
>@
ii
t
i
wu d .
Die Formfunktionsmatrizen fallen dabei je Knotenkreis an und sind von der Bauform
»
¼
º
«
¬
ª
i
i
i
g0
0g
G , i = 1, 2, 3 (7.178c)
mit den zu Gl. (7.15) im Kapitel 7.2.2 (
Dreieck-Scheiben-Element) ähnlichen Formfunktio-
nen
zcrba
A2
1
g
iiii
. i = 1, 2, 3 . (7.179)
Die hier eingehenden Koeffizienten (s. auch Gl. (7.13)) müssen ebenfalls an das neue Koor-
dinatensystem angepasst werden, sie lauten jetzt
,rrc
,zzb
,zrzra
.jki
kji
jkkji
(7.180)
wobei die Indizes zyklisch laufen:
i, j, k = (1, 2, 3), (2, 3, 1), (3, 1, 2).
Auch der in Gl. (7.179) eingehende Flächeninhalt des Dreiecks kann wieder über die Koor-
dinatendeterminante
213132321
33
22
11
zzrzzrzzr
zr1
zr1
zr1
detA2 (7.181)
bestimmt werden, womit dann der Ansatz vollständig beschrieben ist.
Für die Verzerrungen gilt auch hier wieder der Zusammenhang
dBdGDuDİ
. (7.182)
Damit kann unter Heranziehung der schon in Gl. (7.175) aufgestellten Differenzialoperato-
renmatrix mit Durchführung der Differenziationen auch die
B-Matrix erstellt werden, und
zwar hier zweckmäßig je Knotenkreis zu
7.6 Kreisring-Elemente
179
3,2,1i,
bc
c0
0
r
zc
b
r
a
0b
A2
1
r
g
z
g
z
g
0
0
r
g
0
r
g
ii
i
i
i
i
i
ii
i
i
i
i
»
»
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
«
«
¬
ª
»
»
»
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
«
«
«
¬
ª
w
w
w
w
w
w
w
w
B
. (7.183)
Für die Spannungen ergibt sich so ebenfalls wieder
dBEİEı . (7.184)
Da, wie aus Gl. (7.183) ersichtlich wird, die
B-Matrix jetzt nicht mehr wie beim Dreieck-
Scheiben-Element konstant, sondern von den Koordinaten r und z abhängig ist, sind natür-
lich auch die Verzerrungen und Spannungen im Element veränderlich.
Wie jetzt aus den Gleichungen (7.175) und (7.183) ersichtlich wird, liegt auch beim
Kreis-
ring-Dreieck-Element in ebenen Schnitten ein konstanter Dehnungs- und Spannungszustand
vor. Für die Angabe dieser Werte wählen deshalb die Softwarepakete meist den Flächen-
schwerpunkt oder die Knotenkreise aus.
Die Elementsteifigkeit des
Kreisring-Dreieck-Elementes kann weiter in bekannter Weise an-
gesetzt werden zu
dV
t
V
BEBk
³
,
woraus mit dV = 2 S
.
r dA = 2 S
.
r
.
dr
.
dz folgt
dzdrrzr,zr,ʌ2
t
r
z
³³
BEBk
. (7.185)
Um sich die erforderliche Integration zu erleichtern, nutzt man auch hier vielfach die Nähe-
rung, indem man sich auf den Schwerpunkt bezieht und die Koordinaten folgendermaßen
mittelt:
r
1
3
r, z
1
3
z
i
i1
3
i
i1
3
¦¦
. (7.186)
Hiermit folgt dann für die Elementsteifigkeitsmatrix
rAʌ2
t
| BEBk . (7.187)
7 Elementkatalog für elastostatische Probleme
180
Als ein weiteres Problem muss noch kurz die Krafteinleitung bezüglich Massenkräfte und
Oberflächenkräfte diskutiert werden.
Eine verteilte Massenkraft
>@
r,zpr,zp
z
r
t
p (7.188)
ist dann folgendermaßen als konzentrierte Kraft
³³
r
z
t
p
dzdrrpʌ2F pG
(7.189)
oder je Knotenkreis mit
³³
r
z
t
ipi
dzdrrʌ2F pG
(7.190)
einzuleiten. Näherungsweise kann eine konstante Massenkraft auch gleichmäßig auf die
Knotenkreise zu
3
rA
2FFF
3p2p1p
S|
p (7.191)
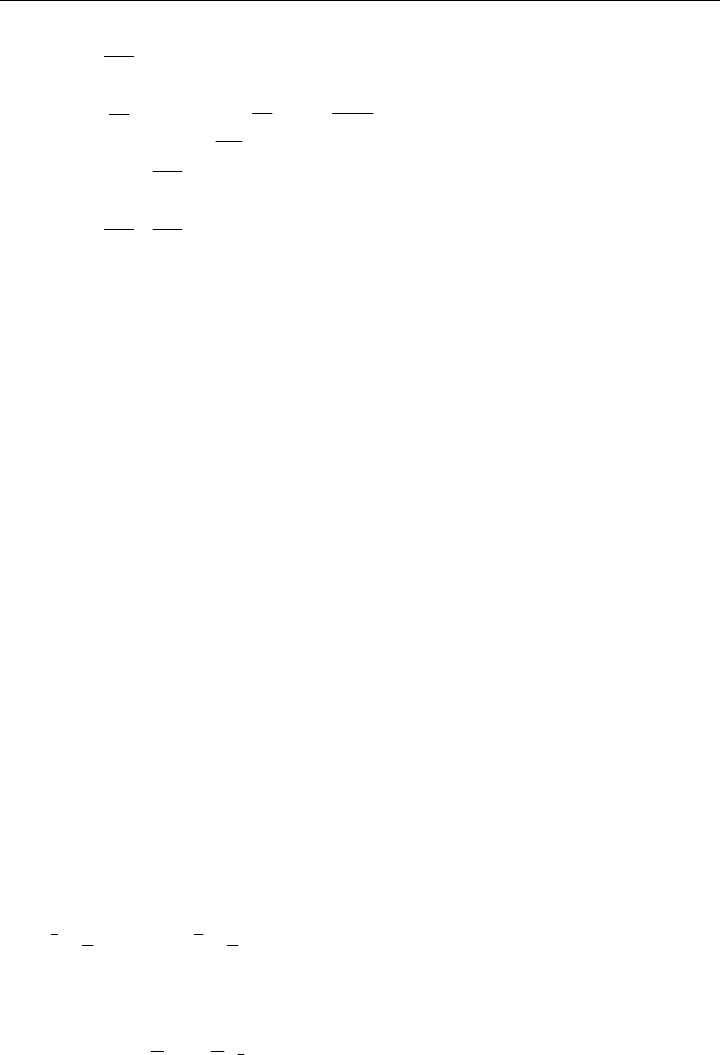
aufgeteilt werden. Ähnlich ist zu verfahren, wenn Oberflächenkräfte an einem Rand wie im
Bild 7.48
wirken.
z
r
R
3
2
1
r
q
Bild 7.48: Einleitung von radialen oder axialen Oberflächenkräften an einem Ring-Element
Mit den Oberflächenkräften
>@
z,rqz,rq
z
r
t
q (7.192)
folgt
7.6 Kreisring-Elemente
181
,0F
1q
(7.193)
.
2
zz
R2FF
23
3q2q
S
q
(7.194)
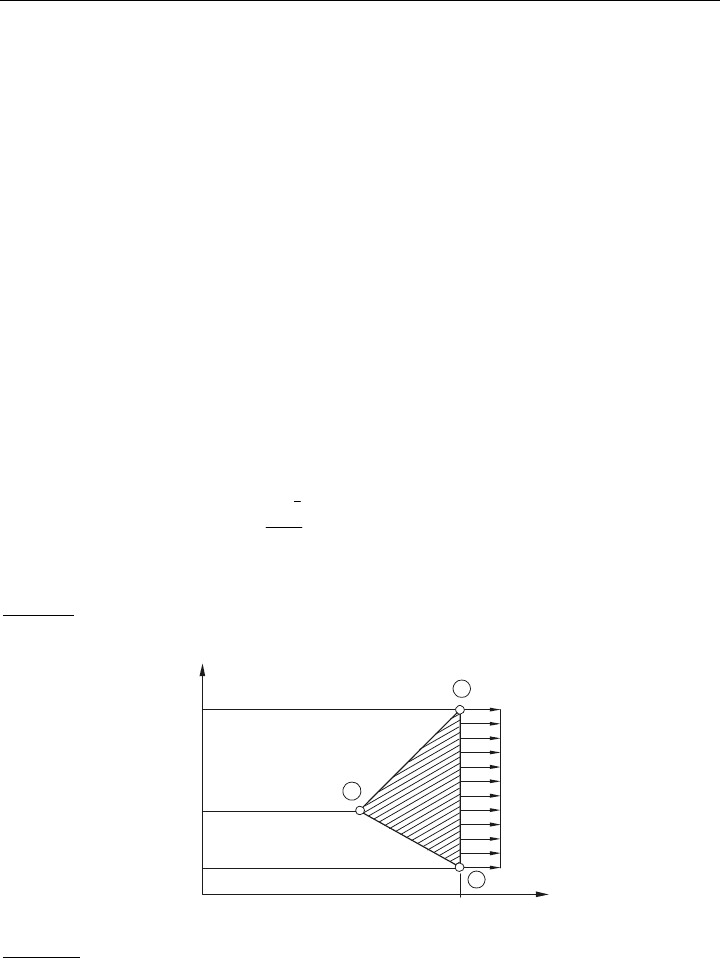
Ein typisches Beispiel für die Anwendung von Kreisring-Elementen sind dickwandige Rohr-
leitungen. Im Bild 7.49
ist die Situation in einer Druckwasserleitung eines Kraftwerkes dar-
gestellt. Druckbeaufschlagte Rohre können im Allgemeinen recht gut analytisch behandelt
werden, weswegen das Beispiel nur der Konvergenzüberprüfung von linearen und quadra-
tischen
Kreisring-Dreieck-Elementen dient.
6,307
313
6,99
1,87
i
r
a
r
i
p
2
i
mm/N100p
i
rr
mm35r
a
mm25r
i
r
V
2
mm/N308exakt
2
mm/N100exakt
I
V
V
ˆ
t
Bild 7.49:
Analyse einer Druckwasserleitung
Gleichungen:
»
»
¼
º
«
«
¬
ª
¸
¸
¹
·
¨
¨
©
§
¸
¹
·
¨
©
§
V
»
»
¼
º
«
«
¬
ª
¸
¸
¹
·
¨
¨
©
§
¸
¹
·
¨
©
§
V
2
a
2
i
2
a
2
ii
t
2
a
2
i
2
a
2
ii
r
r
r
1
rr
rp
r
r
1
rr
rp

182
8 Kontaktprobleme
Die bisherigen FE-Formulierungen bezogen sich nur auf das mechanische Verhalten einzel-
ner unabhängiger Körper. Hat man es mit mehr als einem Körper (zusammengebaute Struk-
tur) zu tun, so besteht die Möglichkeit des Körperkontaktes infolge Verformung. Die dabei
auftretenden mechanischen Effekte wie Stoßeffekte, Grenzflächendeformationen, Haftung,
Reibung oder wieder Trennung der Körper infolge eines Körperkontakts können mit der bis-
her behandelten Theorie nicht beschrieben werden. Die Körper würden ohne Widerstand
ineinander eindringen. Da dem in der Realität nicht so ist, ist es erforderlich, für die Finite
Elemente Methode ein Verfahren zur Verfügung zu haben, welches im Kontaktfall zwischen
Körpern die mechanischen Gegebenheiten realitätsnah abbildet. Diesem Zweck dienen so
genannte finite Kontaktelemente. Mithilfe der Kontaktelemente modelliert man die Grenz-
flächen der Körper in den Bereichen, wo man Kontakt vermutet. Solange kein Kontakt auf-
tritt, läuft die Berechnung in der bekannten Weise ab. Sollten aber Kontaktflächen aufein-
ander treffen, so setzt ein iterativer Gleichgewichtsalgorithmus ein.
8.1 Problembeschreibung
Im Gegensatz zu der bisher dargestellten Theorie beschränkt sich die Formulierung der Kon-
taktelemente nicht nur auf eine rein mathematisch-mechanische Formulierung, sondern sie
beinhaltet zusätzlich einen Rechenalgorithmus, der zwischen modellierten Kontaktflächen
einen Kontakt erkennen muss. Auch wenn die einfachsten konstitutiven Beziehungen, wie
zum Beispiel das Coulomb’sche Reibungsgesetz, verwendet werden, ist die computerge-
mäße Beschreibung des hochgradig nichtlinearen Kontaktproblems schwierig. Die Schwie-
rigkeit der Formulierung und Modellierung des Kontaktproblems liegt beispielsweise in dem
Unvermögen, die sich ergebenden Kontaktflächen genau vorherzusagen. Die Randbedin-
gungen sind der Analyse auch a priori nicht bekannt, sie hängen nämlich von den Lösungs-
variablen selbst ab. Folglich ist ein inkrementelles Lösungsverfahren erforderlich.
Die hier dargestellte Theorie zur Behandlung von Kontaktproblemen erlaubt die Behandlung
von zweidimensionalen ebenen Kontaktproblemen unter quasistatischen Bedingungen, d. h.,
bei aneinander abgleitenden Kontaktflächen bewegen sich die Körper so langsam, dass
dynamische Effekte wie Trägheitseffekte und Dämpfungseffekte in den relativ zueinander
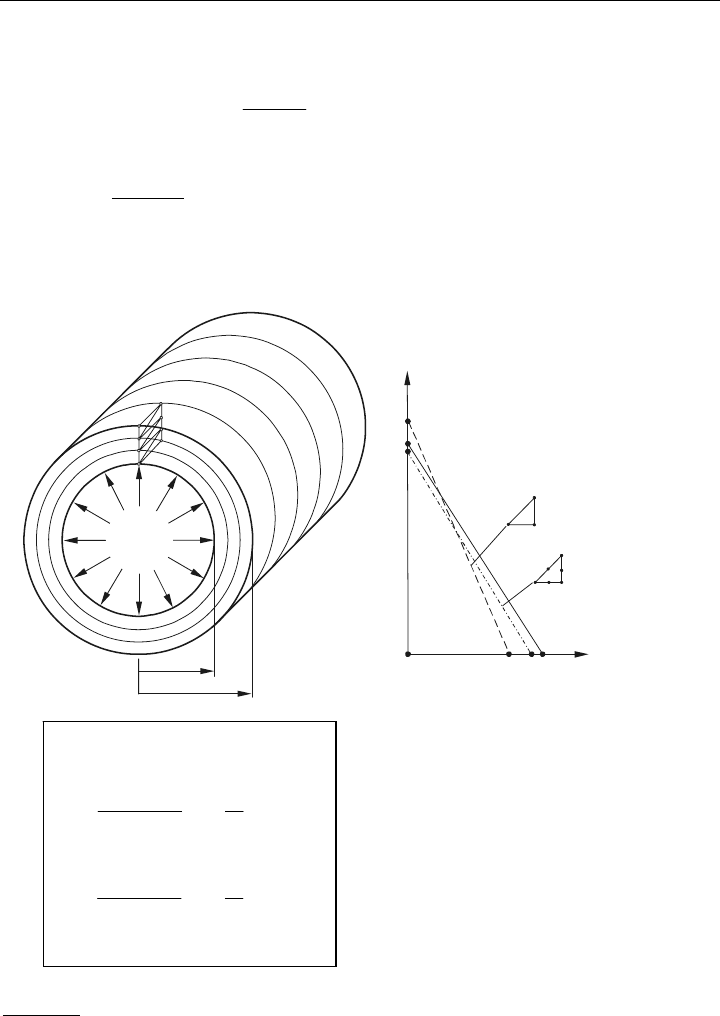
bewegten Kontaktflächen vernachlässigbar sind. Das umseitige Bild 8.1 zeigt schematisch
das hier betrachtete ebene Kontaktproblem in Form zweier beliebiger Körper, die sich unter
Belastung berühren.
Die Festlegung als Kontakt- und Zielkörper ist im Prinzip willkürlich, hängt aber davon ab,
ob ein symmetrischer oder asymmetrischer Kontakt vorliegt.
x Beim symmetrischen Kontakt kann jeder Körper zum Ziel- oder Kontaktkörper erklärt
werden.
x Beim asymmetrischen Kontakt ist es zweckmäßig, bestimmte Regeln einzuhalten:
Wenn der Kontaktbereich auf einer Oberfläche eben/konkav ist und auf der anderen
Oberfläche scharfkantig/konvex ist, sollte die ebene/konkave Oberfläche die Ziel-
fläche sein.
8.1 Problembeschreibung
183
Sind beide Kontaktbereiche konvex (keine scharfen Kanten), sollte die Zielober-
fläche die ebenere der beiden sein.
Ist ein Kontaktbereich scharfkantig und der andere nicht, sollte die scharfkantige
Oberfläche die Kontaktfläche sein.
Wenn beide Kontaktbereiche scharfkantig oder wellig (alternierend konkav/konvex)
sind, ist die Zuordnung beliebig.
Die Festlegung als Kontaktkörper und Zielkörper hat den Hintergrund, dass vom Programm-
algorithmus nur überprüft wird, ob die Knoten des Kontaktkörpers in den Zielkörper ein-
dringen. Der umgekehrte Fall wird gewöhnlich nicht überprüft. Folglich können die Knoten
des Zielkörpers in den Kontaktkörper eindringen, ohne dass Reaktionen hervorgerufen wer-
den. Die Fläche des Zielkörpers ist außerdem die Fläche, auf welche die freigeschnittenen
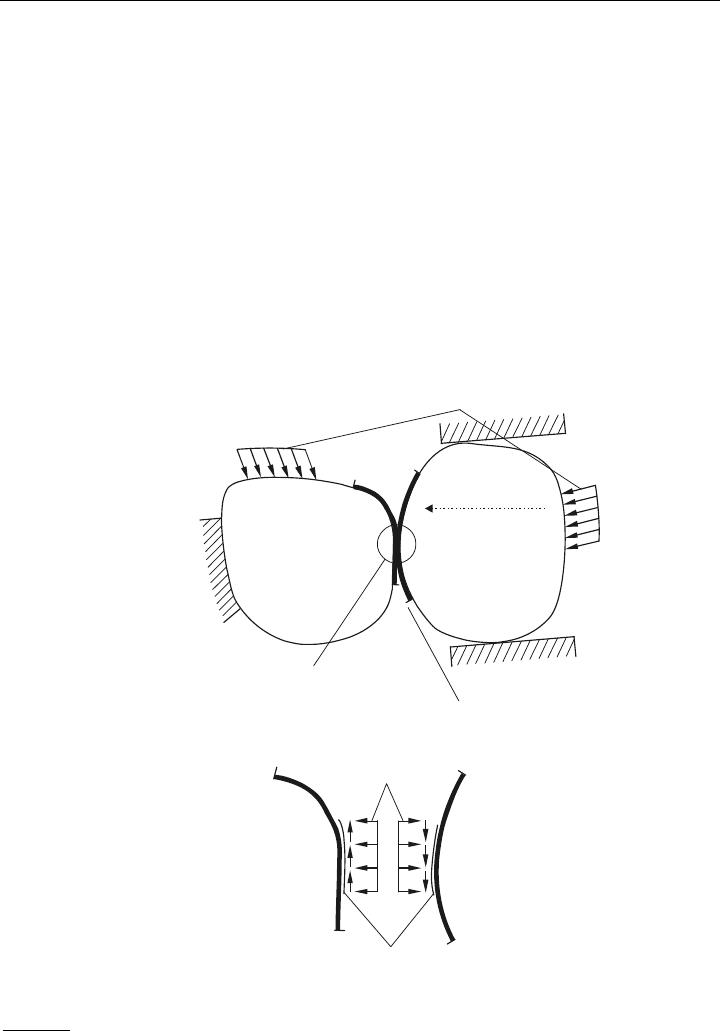
Kontaktkräfte des Kontaktkörpers einwirken.
von außen aufgebrachte
Belastungen
aktuelle
Kontaktzonen
Zielkörper
(target)
Zielkörper
Kontaktkörper
(contactor)
Kontaktkörper
a)
Kontaktkräfte
Kontaktzone
b
)
Randbe-
dingung
modellierte
Kontaktelemente
Bild 8.1: Zwei in Kontakt befindliche asymmetrische Körper
a) Bedingungen beim Kontakt
b) freigeschnittene Körper im Kontaktbereich
8 Kontaktprobleme
184
Für eine allgemeine Verwendbarkeit der finiten Kontaktelemente muss das finite Kontakt-
modell einigen Forderungen genügen. Kontakt zwischen elastischen Körperpaarungen oder
starr-elastischen Körperpaarungen muss genauso möglich sein, wie der wiederholte Kontakt
oder die wiederholte Trennung der Körper. Die Formulierung des Kontaktmodells muss
große relative Bewegungen zwischen den Körpern erlauben. Die Lösungsmethode für Kon-
taktprobleme muss in allgemeine nichtlineare Lösungsmethoden einzubinden sein. Haft-
oder Gleitbedingungen sollten einem realistischen physikalischen Modell entstammen und
partielles Haften und Gleiten sollte möglich sein.
Ein realistisches Reibgesetz ist das Coulomb‘sche Reibgesetz. Es kennt die zwei Reibungs-
koeffizienten
P
s
und
dsd
PtPP ;
P
s
ist der statische Haftreibungskoeffizient und
P
d
ist
der dynamische Gleitreibungskoeffizient. Für eine partielle Kontaktfläche sei F
N
der Betrag
des senkrecht auf die Teilfläche wirkenden resultierenden Kraftvektors und
F
R
der Betrag
des tangential auf die Teilfläche wirkenden resultierenden Kraftvektors.
Ist
NsR
FȝF d , so gibt es keine Relativbewegung zwischen den Teilflächen. Die Teil-
flächen haften aneinander. Überschreitet die tangentiale Kraftkomponente F
R
die maximale
Haftkraft P
s
N
F , so gleiten die Flächen aneinander ab. Während der Gleitreibung ist die
tangentiale Reibwiderstandskraft F
R
gleich
P
d
N
F
. Die Relativbewegung (Gleiten) dauert
solange an, wie die tangentiale Reibwiderstandskraft
F
R
gleich der dynamischen Gleitrei-
bung
P
dN
F
ist. Sinkt die bestimmte tangentiale Reibwiderstandskraft unter die dynami-
sche Gleitreibung P
d
N
F
, so hört die Relativbewegung auf, bis zu dem Zeitpunkt, wo die
tangentiale Reibwiderstandskraft F
R
die statische Haftgrenze
P
s
N
F
wieder überschreitet.
Das obige Reibgesetz muss über jedes einzelne Kontaktflächensegment befriedigt werden,
sodass auch partielles Haften und Gleiten betrachtet werden können.
Es sei noch angemerkt, dass im nachfolgenden beschriebenen Kontaktmodell elastische
Effekte in der
Kontaktfläche vernachlässigt werden und somit starr-plastisches Kontaktver-
halten angenommen wird. Zwar wird für die Kontaktelemente selber starr-plastisches Ver-
halten angenommen, die zweidimensionale FE-Diskretisierung um die Kontaktregion herum
kann aber auch elastisches Materialverhalten erfassen.
8.2 Einfache Lösungsmethode für Kontaktprobleme
Aus Bild 8.1 b) geht hervor, dass die Kontaktbedingungen an den Kontaktflächen für einen
einzelnen Körper Verschiebungs- und Kräfterandbedingungen sind. Mathematisch gesehen
handelt es sich um Nebenbedingungen. Eine mathematische Möglichkeit zur Einarbeitung
von Nebenbedingungen bietet die Methode der
Lagrange-Multiplikatoren.
Mittels der Lagrange-Multiplikatoren lassen sich Extremwertaufgaben mit Nebenbedin-
gungen lösen. Zur Formulierung der Extremwertaufgabe mit Nebenbedingungen benötigt
man deshalb eine zu minimierende oder maximierende Funktion und die Nebenbedingungen.
Bei elastomechanischen Problemen gilt beispielsweise das Prinzip vom Minimum der
totalen potenziellen Energie W. Für diskrete statisch lineare Systeme ist somit zu fordern:
8.2 Einfache Lösungsmethode für Kontaktprobleme
185
MINIMUM!
2
1
ǻW
tt
o PUUUKU
(8.1)
Nun sei das System durch die diskreten Nebenbedingungen mit den Festwerten
n
0nUN
eingeschränkt. Dann wird bei der Multiplikatorenmethode das folgende erweiterte Funktio-
nal angesetzt:
)(+
2
1
W
ttt*
nUNȜPUUKU . (8.2)
Die Stationaritätsbedingung
0W
*
G führt unter Verwendung der Beziehung
ȜNUUNȜ G G
ttt
auf
.=)nUN(ȜȜ)N+PUK(U
)nUN(ȜUNȜ+PUUKU
)nUN(Ȝ)nUN(Ȝ+PUUKU
*
0
W
0
t
0
tt
tttt
tttt
GG
GGGG
GGGG G
(8.3)
Da
t
UG und
t
ȜG willkürlich sind, erhält man das Gleichungssystem
»
¼
º
«
¬
ª
»
¼
º
«
¬
ª
»
»
¼
º
«
«
¬
ª
n
P
Ȝ
U
0N
NK
t
. (8.4)
Bei Kontaktproblemen erweist sich der Lagrange-Multiplikator
Ȝ
als Vektor der Kontakt-
Knotenpunktkräfte, wie folgendes Beispiel verdeutlichen soll.
1
3
k
e
4
z,w
x
2
w
2
F
2
F
3
M
2
w
3
'
w
23
JE,L
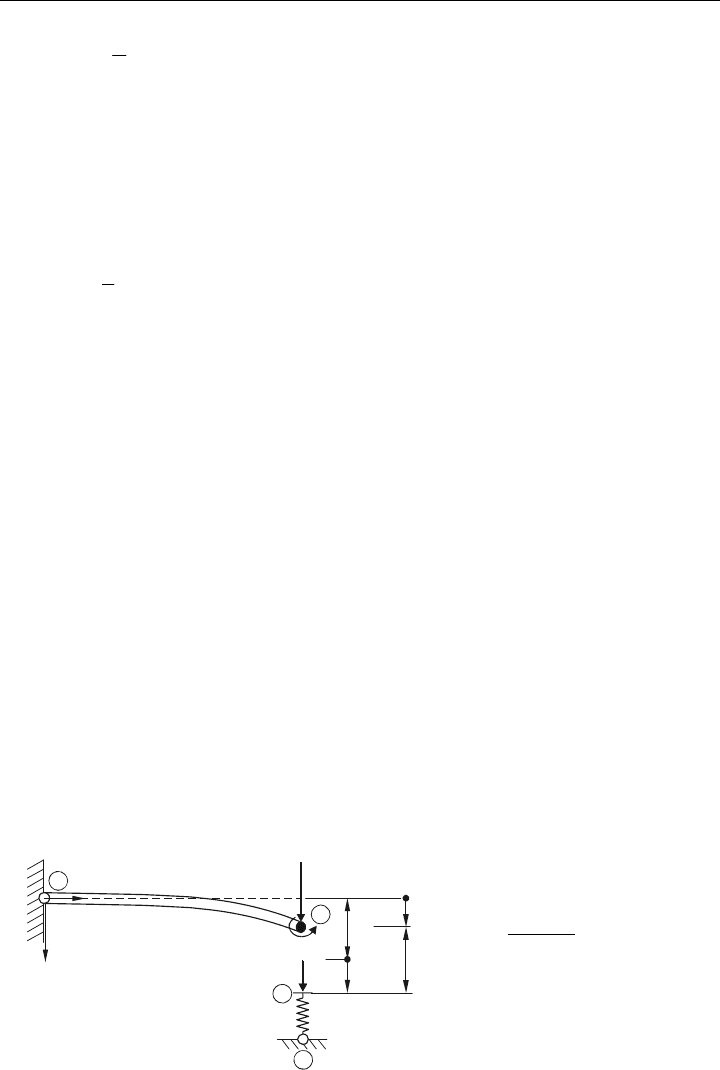
Bild 8.2:
Kragbalken mit federn-
dem Anschlag bei kom-
primierter Feder
(e =
ˆ
w
max
freier Weg,
3
w = Federweg)
8 Kontaktprobleme
186
Es sei:
2323
wwew '
Kontaktbedingung: 0w
23
' 0wwew
2323
'
Ablösebedingung: 0w
23
!' 0wwew
2323
!
'
Ist
ew
2
, so besteht kein Kontakt zwischen Knoten 2 und der Kontaktfläche 3. Es gilt für
das Gesamtsystem die Beziehung
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
¬
ª
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
¬
ª
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
¬
ª
3
2
2
2
23
3
2
2
w
ȥ
w
k00
0
L
JE4
L
JE6
0
L
JE6
L
JE12
F
M
F
. (8.5)
Gilt hingegen unter Belastung w e + w
23
(bzw.
32
FF ), so besteht Kontakt zwischen
dem Kontaktknoten 2 und der Kontaktfläche 3. Dann gilt mit der Nebenbedingung
w-w e
23
o
>@
nUN o
»
»
»
¼
º
«
«
«
¬
ª
e
w
ȥ
w
101
3
2
2
(8.6)
das erweiterte Gleichungssystem
»
»
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
«
«
¬
ª
»
»
»
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
«
«
«
¬
ª
»
»
»
»
»
»
»
»
»
¼
º
«
«
«
«
«
«
«
«
«
¬
ª
Ȝ
w
ȥ
w
0101
1k00
00
L
JE4
L
JE6
10
L
JE6
L
JE12
e
F
M
F
3
2
2
2
23
3
2
2
. (8.7)
Die dritte Gleichung im vorstehenden Gleichungssystem (s. auch Gl. 8.4) lautet:
3333
Fwk=wkF OoO
.
Das Auflösen des Gleichungssystems liefert z. B. für
w
3
und O
k
L
J3E
L
eJ3E
2L
3M
FF
w
3
3
2
32
3
,
1
L
k
J3E
k
F
e
L
J3E
2L
3M
F
3
3
3
2
2
¸
¹
·
¨
©
§
O
.
8.2 Einfache Lösungsmethode für Kontaktprobleme
187
Hier zeigt sich, dass es sich bei
O um eine Kraftgröße handeln muss. Während
3
F
eine Kraft
ist, die direkt am Knoten 3 angreift, kann es sich bei
O nur um die Kraft handeln, welche
durch den Kontakt auf die Kontaktfläche 3 übertragen wird.
3
F und O bewirken zusammen
die Verschiebung
3
w an der Feder k. Der Lagrange-Multiplikator
Ȝ
stellt damit die Kon-
taktkraft dar, die von einer Kontaktfläche zur anderen übertragen wird.
Das vorstehende Beispiel diente nur der prinzipiellen Darlegung des Kontaktproblems. In
der Praxis sind die Probleme aber recht vielfältig und natürlich nicht so einfach. Ein
typisches Maschinenbauproblem mit Kontakt stellt die Übertragung eines Drehmoments
mittels einer Passfederverbindung dar. Die Verhältnisse sind im Bild 8.3
dargestellt.
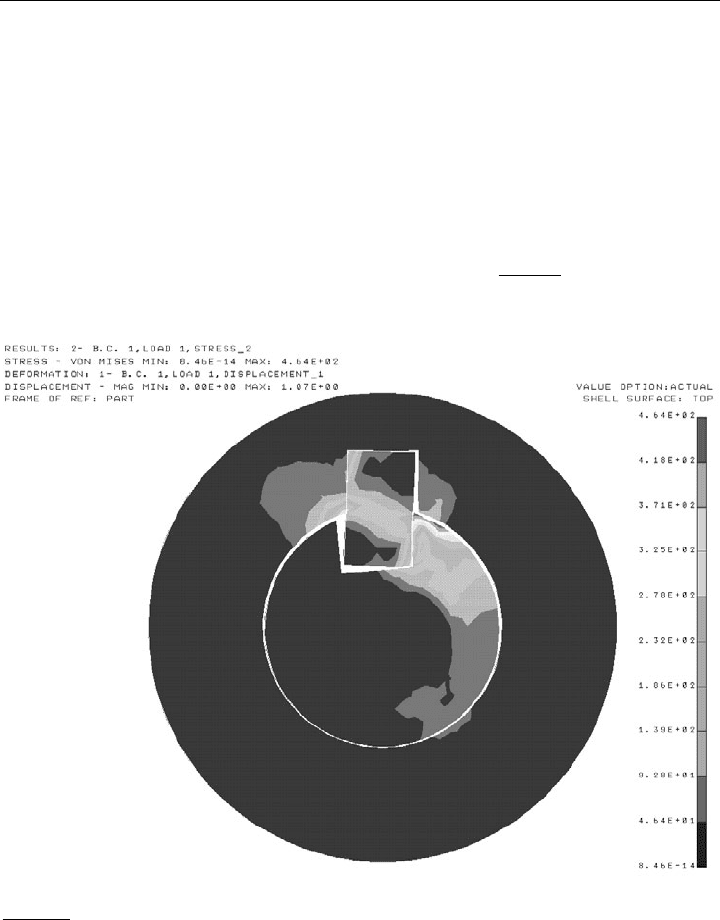
Bild 8.3: Kontaktproblem an einer Passfederverbindung
Beobachtet man die Kraftübertragung, so ist Folgendes festzustellen: Zu Anfang liegt Spiel
vor, d. h., die Passfeder macht eine Starrkörperbewegung bis sie anliegt. Erst wenn Kontakt
hergestellt ist, erfolgt die Kraftübertragung. Wie später gezeigt werden wird, kann das
Problem nur iterativ gelöst werden. Weil hierzu programmtechnische Routine erforderlich
ist, sollte eine begleitende Ergebnisabschätzung über die Hertz’schen Pressungsgleichungen
vorgenommen werden.