Кириллов И.И. Автоматическое регулирование паровых турбин и газотурбинных установок
Подождите немного. Документ загружается.

Иис.
10.7.
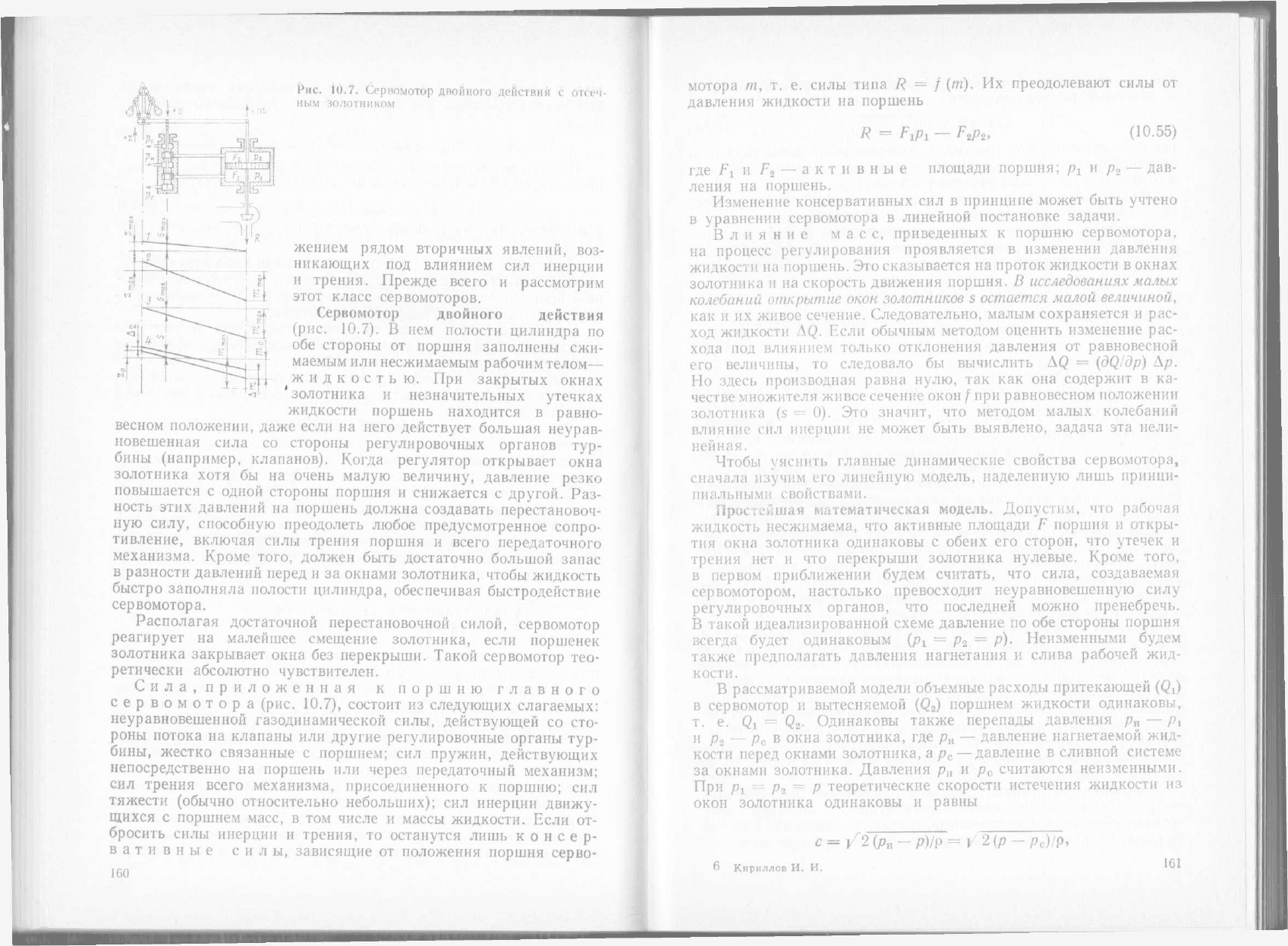
Сервомотор двойного действия
с
отсеч-
ным золотником
жением рядом вторичных явлений, воз-
никающих
под
влиянием
сил
инерции
и трения. Прежде всего
и
рассмотрим
этот класс сервомоторов.
Сервомотор двойного действия
(рис.
10.7). В нем
полости цилиндра
по
обе стороны
от
поршня заполнены сжи-
маемым
или
несжимаемым рабочим телом—
(
Жидкостью.
При
закрытых окнах
'золотника
и
незначительных утечках
жидкости поршень находится
в
равно-
весном положении, даже если
на
него действует большая неурав-
новешенная сила
со
стороны регулировочных органов тур-
бины (например, клапанов). Когда регулятор открывает окна
золотника хотя
бы на
очень малую величину, давление резко
повышается
с
одной стороны поршня
и
снижается
с
другой. Раз-
ность этих давлений
на
поршень должна создавать перестановоч-
ную силу, способную преодолеть любое предусмотренное сопро-
тивление, включая силы трения поршня
и
всего передаточного
механизма. Кроме того, должен быть достаточно большой запас
в разности давлений перед
и за
окнами золотника, чтобы жидкость
быстро заполняла полости цилиндра, обеспечивая быстродействие
сервомотора.
Располагая достаточной перестановочной силой, сервомотор
реагирует
на
малейшее смещение золотника, если поршенек
золотника закрывает окна
без
перекрыши. Такой сервомотор тео-
ретически абсолютно чувствителен.
Сила,приложенная
к
поршню главного
сервомотора
(рис. 10.7),
состоит
из
следующих слагаемых:
неуравновешенной газодинамической силы, действующей
со
сто-
роны потока
на
клапаны
или
другие регулировочные органы тур-
бины, жестко связанные
с
поршнем;
сил
пружин, действующих
непосредственно
на
поршень
или
через передаточный механизм;
сил трения всего механизма, присоединенного
к
поршню;
сил
тяжести (обычно относительно небольших);
сил
инерции движу-
щихся
с
поршнем масс,
в том
числе
и
массы жидкости. Если
от-
бросить силы инерции
и
трения,
то
останутся лишь консер-
вативные силы, зависящие
от
положения поршня серво-
160
мотора
т, т. е.
силы типа
R = f (т). Их
преодолевают силы
от
давления жидкости
на
поршень
R =
FiPi
-
F2P2,
(Ю.55)
где
F
x
и
^-активные площади поршня;
р
г
и р
2
—
дав-
ления
на
поршень.
Изменение консервативных
сил в
принципе может быть учтено
в уравнении сервомотора
в
линейной постановке задачи.
Влияние масс, приведенных
к
поршню сервомотора,
на процесс регулирования проявляется
в
изменении давления
жидкости
на
поршень.
Это
сказывается
на
проток жидкости
в
окнах
золотника
и на
скорость движения поршня.
В
исследованиях малых
колебаний открытие окон золотников
s
остается малой величиной,
как
и их
живое сечение. Следовательно, малым сохраняется
и
рас-
ход жидкости
AQ.
Если обычным методом оценить изменение рас-
хода
под
влиянием только отклонения давления
от
равновесной
его величины,
то
следовало
бы
вычислить
AQ =
(dQIdp)
Ар.
Но здесь производная равна нулю,
так как она
содержит
в ка-
честве множителя живое сечение окон
/ при
равновесном положении
золотника
(s = 0). Это
значит,
что
методом малых колебаний
влияние
сил
инерции
не
может быть выявлено, задача
эта
нели-
нейная.
Чтобы уяснить главные динамические свойства сервомотора,
сначала изучим
его
линейную модель, наделенную лишь принци-
пиальными свойствами.
Простейшая математическая модель. Допустим,
что
рабочая
жидкость несжимаема,
что
активные площади
F
поршня
и
откры-
тия окна золотника одинаковы
с
обеих
его
сторон,
что
утечек
и
трения
нет и что
перекрыши золотника нулевые. Кроме того,
в первом приближении будем считать,
что
сила, создаваемая
сервомотором, настолько превосходит неуравновешенную силу
регулировочных органов,
что
последней можно пренебречь.
В такой идеализированной схеме давление
по обе
стороны поршня
всегда будет одинаковым
(рх = р
2
= р).
Неизменными будем
также предполагать давления нагнетания
и
слива рабочей жид-
кости.
В рассматриваемой модели объемные расходы притекающей
(Qx)
в сервомотор
и
вытесняемой
(Q
2
)
поршнем жидкости одинаковы,
т.
е. Qj = Q
2
.
Одинаковы также перепады давления
р
я
— р
х
и
р.
2
— р
с
в
окна золотника,
где р
п
—
давление нагнетаемой жид-
кости перед окнами золотника,
а р
с
—
давление
в
сливной системе
за окнами золотника. Давления
р
п
и р
с
считаются неизменными.
При
рх — р
2
= р
теоретические скорости истечения жидкости
из
окон золотника одинаковы
и
равны
с
= /2 (р
в
- р)/р = у "2 (р -
р
с
)/р,
б Кириллов
И. И.
161
где
р —
плотность жидкости.
В
этом случае
р = (р
н
+
р
с
)/2,
и объемный расход жидкости
Q
= sb\i
у
г
(
Рн
-
Рс
)р,
(10.56)
где
s —
открытие окон золотника, измеряемое
от
положения рав-
новесия
при s = 0; b —
суммарная ширина прямоугольных окон
в одном ряду;
р —
коэффициент расхода.
Живое сечение
bs
каждого ряда окон изменяется
в
процессе
регулирования пропорционально ходу золотника
s.
Уравнение движения поршня. Перемещение
т
поршня опре-
делим исходя
из
уравнения материального баланса
Fth = Q
и
с
использованием
(10.56)
Fm
=
sbpi
(р
н
—
Ро)/р.
То
же
уравнение перепишем
в
относительных величинах:
T
s
x
m
= x
s
,
(10.57)
где
х
т
=
Ат/т
тах
;
x
s
= s/s
max
;
T
s
=
Fm\
m
J{s
max
b\i
у/
(р
н
—
(р
с
)/р).
(10.58)
Динамическая постоянная
Г
3
называется
временем сервомотора.
В ее
выражении
(10.58)
числитель представ-
ляет собой объем жидкости, засасываемой
и в то же
время
вы-
тесняемой поршнем
в
течение
его
максимального рабочего хода,
а знаменатель
—
секундный расход жидкости
при
полностью
открытых окнах золотника
на
величину
s
max
,
причем
ход
золот-
ника
s
max
соответствует рабочему ходу поршня m
max
. Динамиче-
ская постоянная
T
s
равна времени,
за
которое поршень сервомотора
проходит максимальный рабочий путь
при
полностью открытых
окнах золотника.
В
экспериментальной установке
при
определе-
нии динамической постоянной
T
s
следует устранять действие
вы-
ключателя сервомотора, чтобы открытие окон золотника
не из-
менялось
во
время движения поршня.
Заметим,
что
в
(10.58)
входит передаточное число
s
max
!m
max
= g.
В случае жестких механических связей
оно
сохраняется неизмен-
ным
на
протяжении всего хода поршня.
В
таких условиях
и
время
Т
ь
не
изменяется, если, рассматривая равновесные режимы,
вместо отношения максимальных ходов подставлять любое иное
отношение перемещений
(As/Am)
= g.
Другими словами,
из лю-
бого равновесного положения поршня
гп,
после мгновенного откры-
тия окон золотника
на
соответствующую высоту
s = gm и
сохра-
нения
ее
постоянной, поршень проходит путь
m за
одно
и то же
время
(см. рис. 7.1).
Уравнение золотника. Золотник составляет неотъемлемую
часть сервомотора.
Его
связи
с
регулятором
и
поршнем серво-
мотора выбираются механическими, гидравлическими
или
электри-
ческими. Суть дела достаточно разъяснить
на
примере рычажной
162
передачи. Другие связи легко привести
к аналогичным кинематическим зави-
симостям,
за
исключением, быть
мо-
жет, гибких обратных связей,
о
кото-
рых речь
еще
будет впереди.
Допустим,
что
регулятор
и
пор-
шень передают движение золотнику
при постоянных передаточных числах
(плечи рычагов достаточно велики).
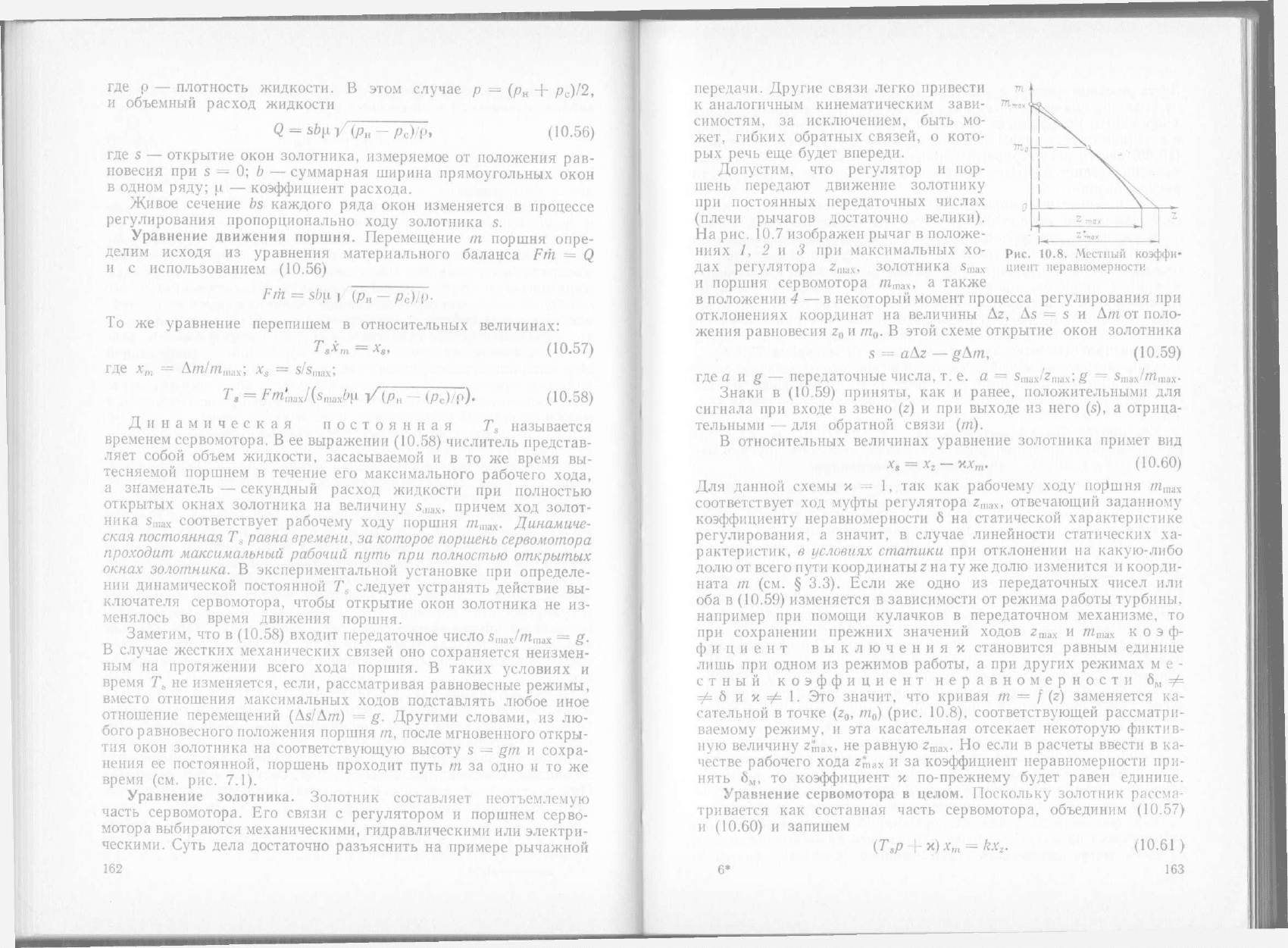
На
рис. 10.7
изображен рычаг
в
положе-
ниях
1, 2 И 3 при
максимальных
ХО- р
ис
,
0
.
8
.
Местный коэффи-
дах регулятора z
max
, золотника
s
raax
циент неравномерности
и поршня сервомотора m
max
,
а
также
в положении
4 — в
некоторый момент процесса регулирования
при
отклонениях координат
на
величины
Az, As = s и Am от
поло-
жения равновесия
z
0
и т
0
. В
этой схеме открытие окон золотника
s =
aAz
— gAm,
(10.59)
где
а и g —
передаточные числа,
т. е. а = s
max
/z
max
;g = s
max
/m
max
.
Знаки
в
(10.59)
приняты,
как и
ранее, положительными
для
сигнала
при
входе
в
звено
(г) и при
выходе
из
него
(s), а
отрица-
тельными
—
для
обратной связи
(т).
В относительных величинах уравнение золотника примет
вид
x
s
= x
z
— кх
т
.
(10.60)
Для данной схемы
х 1, так как
рабочему ходу поршня т
тах
соответствует
ход
муфты регулятора z
max
, отвечающий заданному
коэффициенту неравномерности
б на
статической характеристике
регулирования,
а
значит,
в
случае линейности статических
ха-
рактеристик,
в
условиях статики
при
отклонении
на
какую-либо
долю
от
всего пути координаты
г
на ту же
долю изменится
и
коорди-
ната
т (см. § 3.3).
Если
же
одно
из
передаточных чисел
пли
оба
в
(10.59)
изменяется
в
зависимости
от
режима работы турбины,
например
при
помощи кулачков
в
передаточном механизме,
то
при сохранении прежних значений ходов г
шах
и
т
тах
коэф-
фициент выключениях становится равным единице
лишь
при
одном
из
режимов работы,
а при
других режимах
м е -
стный коэффициент неравномерности
б
ы
=^
ф
б и х ф 1. Это
значит,
что
кривая
т = / (г)
заменяется
ка-
сательной
в
точке
(z
0
, т
0
)
(рис. 10.8),
соответствующей рассматри-
ваемому режиму,
и эта
касательная отсекает некоторую фиктив-
ную величину
Zm
ax
,
не
равную z
max
.
Но
если
в
расчеты ввести
в ка-
честве рабочего хода
z
miiX
и за
коэффициент неравномерности при-
нять
б
м
, то
коэффициент
х
по-прежнему будет равен единице.
Уравнение сервомотора
в
целом. Поскольку золотник рассма-
тривается
как
составная часть сервомотора, объединим
(10.57)
и
(10.60)
и
запишем
(T,p
+ x)x
m
= kx
z
.
(10.61)
о*
163
Здесь входной сигнал
х
г
исходит
от
регулятора,
а
выходной
—
от хода поршня сервомотора
х
т
.
Поскольку имеем относительные
координаты, коэффициент усиления
k и
коэффициент выключения
х
в
данном случае равны единице.
Но
если
в
уравнение золотника
(10.60)
ввести регулируемый параметр
х
а
= 8х
г
, то
коэффициент
усиления станет
k = 1/6, где б —
коэффициент неравномерности
регулирования.
Рассматриваемая математическая модель сервомотора пред-
ставляет собой апериодическое звено
со
всеми
его
свойствами.
В частности,
его
переходная функция имеет
вид,
изображенный
на
рис. 7.1, а
время сервомотора
T
S
определяется
как
отрезок
Г,
отсекаемый
на оси
нового положения равновесия касательной
к кривой процесса, проведенной
из
начала координат
или из
любой другой точки кривой. Последнее свойство было
уже
отме-
чено указанием
на то, что из
любого положения равновесия
т,
после мгновенного открытия окон
на
величину
s = gm = const,
поршень проходит весь путь
т за
одно
и то же
время
T
s
.
Сервомотор,
как и
любое апериодическое звено, обладает свой-
ством саморегулирования,
т. е.
выведенный
из со-
стояния покоя
он сам
находит новое положение равновесия
(см.
§
7.1).
Сервомотор
без
выключателя. Приняв
в (10.61) к = 0, что
равносильно устранению обратной связи, получим другую
ма-
тематическую модель, описываемую уравнением
T
s
px
m
= kx
z
. (10.62)
Эта модель представляет собой интегрирующее зве-
но
с
динамическими свойствами, резко отличающимися
от
свойств
апериодического звена
(см. § 7.3).
Быстродействие сервомотора
без обратной связи возрастает,
так как при
одинаковом времени
T
S
его переходная функция (прямая линия
на рис. 7.4)
совпадает
с касательной
в
начале координат
к
переходной функции серво-
мотора
с
выключателем.
С
другой
же
стороны, устранение выклю-
чателя делает звено неустойчивым, неспособным самостоятельно
переходить
к
новому равновесному положению.
С
этой точки зре-
ния
к
такому звену
и не
подходит название сервомотора
как ме-
ханизма, обладающего саморегулированием
в
высокой степени.
Сервомотор
без
выключателя
как
динамически несовершенное
звено может применяться лишь
в
комбинации
с
другими звеньями
с сильно выраженными свойствами саморегулирования, способ-
ными компенсировать
его
неполноценность. Надо сказать,
при
современных технических средствах изготовление выключающего
механизма редко вызывает такие затруднения, которые могли
бы
оправдать заметное ухудшение динамических свойств системы
регулирования
от
введения интегрирующего звена.
Учет разности давления
на
поршень. Сила сопротивления
R,
действующая
на
поршень,
и
неравенство
его
активных площадей
F
1
и F
2
могут порождать существенную разность давления
164
j
Ри— Pi I- В
этом сл
У
чае
уравнение неразрывности потока
в
сер-
вомоторе следует записать раздельно
для
первой
и
второй
его
частей
(рис. 10.7):
F-jh
= Q
x
; F
2
m = Q
2
. (10.63)
Расходы
Q
x
и Q
2
вычисляются
по
формулам, аналогичным
(10.56):
Qi = sb^ V~
2
(р
н
— pi)/p; Q
2
=
sb
2
[i
2
У
2 (p
2
— p
0
)/p, (10.64)
где индексы
1 и 2
относятся
к
первой
и
второй площадям поршня.
Подставив
в (10.63)
вместо
Q
x
и Q
2
их
выражения
(10.64)
и решив полученные уравнения относительно
р
г
и р
2
,
найдем:
р!=р
а
-
{F^f
S
-
2
p/(2b?K?);
(Ю.65)
Pi = Рс+ (F
2
mf s~
2
p/(2fc
2
2
u1). (10.66)
Умножив
(10.65) на F
lt
а (10.66) на F
2
и
вычтя второе урав-
нение
из
первого, определим согласно
(10.55)
действующую
на
поршень силу
R, а
затем
и
скорость поршня
т
= s
1
2
(F
lPn
-
F
2
p
c
- R)/[F'i ф^Г'
2
+ F
J
2
(&
а
ЦгГ1
Р"
1
-
(Ю.67)
Перейдем,
как
обычно,
к
относительным величинам
х
т
и x
s
,
умножив
и
разделив левую часть
(10.67) на
т
шах
,
а
правую
—
навщах.
так что в
правой части
при x
s
появится множитель s,
liax
/m
:
„
ax
.
С этим дополнительным множителем весь коэффициент
при
пере-
менной
x
s
обозначим
l/T's и
уравнение
(10.67)
запишем
в
виде
T'
s
x
m
+ %х
т
= x
z
, (10.68)
где
T's
имеет смысл времени сервомотора.
По схеме
на рис. 10.7
последнее уравнение относится
к
движе-
нию поршня вверх.
Его
перемещение вниз можно описать также
уравнением вида
(10.67),
лишь заменив
в нем
выражение
в
скоб-
ках, содержащее силу
R, на (F
2
p
H
—
F
x
p
c
+ R), так как в
пер-
вом случае сила
R
представляла собой сопротивление,
а при из-
менении направления движения
та же
сила будет направлена
в сторону
его
перемещения. Такое
же
изменение надо внести
и
в
выражение динамической константы
T
s
для
движения вниз
по сравнению
с T'
s
для
движения вверх. Приняв
во
внимание ска-
занное, получим уравнение движения поршня вниз
ТsX-m
~\~
Х
т
~ Xz- (10.69)
При этом отношение времени
T's/Tl
- (F
2
p
a
-
F
lPc
+ RY'WiPn -
F
2
p
c
-
Rf<
2
.
(10.70)
Последняя формула вскрывает технические средства, позволя-
ющие конструктору выбирать
по
желанию оптимальную скорость
движения поршня сервомотора
в
сторону открытия
и
закрытия
распределительных органов турбины.
Для
этой цели можно менять
165
силу
R (от
неуравновешенного давления
на
клапаны
и от сил
пружин),
и
активные площади
и F
2
, а
также
—
давление
нагнетания. Обычно конструктор предпочитал выбирать мини-
мальным время закрытия клапанов
для
уменьшения разгона тур-
бины
(T
s
< T's).
Это
достигалось,
в
частности,
за
счет увеличения
силы пружины
в
составе силы
R. В
последнее время значительно
возросли требования
и к
быстродействию сервомотора
при
откры-
тии клапанов, чтобы повысить надежность энергетической
си-
стемы
в
аварийных ситуациях
(см. §
20.2).
Что касается силы
R в
целом,
то она
может значительно
ме-
няться
в
зависимости
от
положения поршня. Решая задачу устой-
чивости
в
рамках малых колебаний, величину
R в
выражениях
T
s
надо выбирать соответственно координате
т
для
рассматриваемого
режима. Действительное время полного хода сервомотора можно
определить
с
учетом меняющейся силы
R — f (т)
путем построе-
ния процесса регулирования методом численного интегрирования
или экспериментально.
Во всех случаях, когда
T'
s
Ф Т$,
уравнение сервомотора при-
водит
к
нелинейной задаче исследования процесса регулирования.
Для приближенного решения задач устойчивости можно при-
нимать среднюю величину времени сервомотора
или ее
большую
величину, предполагая,
что
уменьшение времени
T
s
лишь улуч-
шит качество звена. Если активные площади поршня мало раз-
личаются,
и
допустимо принять
Fx = F
2
= F, то
обозначив
Р
= F (р
п
— р
с
),
уравнению
(10.70)
можно придать
вид
T
s
/T; =
V(l+R/P)/(l
- R/P).
(10.71)
Пружинный сервомотор. Характерная особенность чисто пру-
жинного сервомотора:
его
рабочее тело оказывает давление лишь
на одну сторону поршня, движение
же в
другую сторону совер-
шается
за
счет аккумулированной энергии
в
пружине
(см. рис.
2.5).
Давление
под
поршнем
р
зависит
от
силы пружины
R
np
и
неурав-
новешенной силы
со
стороны передаточного механизма
R
n
.
м
.
Обозначим буквой
R
сумму этих
сил и
найдем давление
р = R/F,
где
F —
активная площадь поршня.
Уравнение движения поршня сервомотора вверх
(T
s
= Ts)
и вниз
(T
s
= Tl)
совпадает
с
(10.68)
и
(10.69),
но при
других зна-
чениях динамических констант:
TS = Fm
m
J(s
ma
,bn
l]
•'2(р
а
- />).'(>);
(10.72)
T"
s
= Fm
m
J(s
max
bn
2
1 "2 (p
p
c
)/p). (10.73)
Коэффициенты расхода
ц
х
и u.
2
могут быть разными,
так
как
при
обращении движения жидкости изменяется сопротивле-
ние
в
зоне окон золотника.
Для
пружинного сервомотора нередко
выбирают время
T'
s
значительно меньше
T'
s
,
чтобы повысить ско-
рость
и
надежность закрытия клапанов.
166
Наличие пружины обеспечивает закрытие доступа рабочего
пела
в
турбину
при
аварийной потере давления жидкости
в
сер-
вомоторе.
Это
большое преимущество пружинного сервомотора.
Пружины,
как уже
упоминалось, широко применяются
и для
сер-
вомоторов двойного действия
с
целью повышения надежности
закрытия клапанов турбины
в
аварийных ситуациях.
§
10.5.
СЕРВОМОТОРЫ
С
ДРОССЕЛЬНЫМИ ЗОЛОТНИКАМИ
Принципиальные схемы этих сервомоторов
уже
были
рассмотрены
в § 2.2.
Уравнение движения поршня сервомотора
с проточной системой рабочего тела
в
общем виде было получено
в
§ 10.2, где
изучалась переменная
во
времени емкость сжимаемой
жидкости
и
было выведено
для нее
уравнение
(10.34),
по
идее
совпадающее
с
(10.61).
Из
этого следует,
что
сервомоторы
с
дрос-
сельными
и
отсечными золотниками, удовлетворяющие рассмот-
ренным математическим моделям
и
имеющие одинаковые динами-
ческие постоянные
T
s
и
коэффициенты усиления
k, в
принципе
обладают одними
и
теми
же
динамическими свойствами. Заметим,
что
в
принятой приближенной математической модели
не
были
отражены некоторые важные вторичные явления.
Возникает вопрос: какими техническими средствами может
быть достигнуто требуемое время
T
s
и
коэффициент усиления
k
и какие существенные вторичные явления вносят дроссельные
зо-
лотники?
Принципиальная особенность сервомотора
с
дроссельными
золотниками, меняющими давление
на его
поршень
(см. рис. 2.7),
состоит
в том, что
золотники постоянно дросселируют
при
входе
и выходе жидкость, протекающую сквозь емкость,
к
которой при-
мыкает поршень сервомотора.
При
этом командующий орган,
ме-
няя положение золотников, регулирует давление жидкости
в ем-
кости,
а
силовая часть сервомотора, реагируя
на
изменение дав-
ления
в
емкости между дросселями, действует
как
регулятор
давления.
Поведение такого «регулятора» существенно отличается
от
действия сервомотора
с
отсечным золотником.
На
этот регулятор,
как
и на
любой чувствительный элемент, заметное влияние ока-
зывают движущиеся вместе
с
поршнем массы, переменная пере-
становочная сила
и
трение. Чтобы ослабить
эти
вредные влияния,
приходится создавать достаточно большую поддерживающую силу
(выбирать,
как в
регуляторе, достаточно сильную пружину),
принимать значительную разность давления
на
поршень
р
птх
—
-
Pniin.
соответствующую
его
рабочему ходу т,„
ах
,
и, по
возмож-
ности, ограничивать массы связанного
с
поршнем механизма,
в
том
числе
и
приведенной
к
координате
т
массы движущейся
за поршнем жидкости.
Из сказанного следует,
что
сервомотор
с
дроссельными золот-
никами
не
пригоден
для
быстрого перемещения массивных
рас-
167
пределительных органов крупных турбин.
Для
сервомоторов
с дроссельными золотниками наиболее подходящая область при-
менения
— в
промежуточной ступени усиления между чувствитель-
ным элементом
и
золотником главного сервомотора
там, где
низ-
кий уровень передаваемой энергии.
Сервомотор
с
одним дроссельным золотником. Рассмотрим дви-
жение сервомотора
с
одним дроссельным золотником
2 и
одним
неподвижным дросселем
/ (см. рис. 2.7).
Золотник установлен
в месте слива жидкости
из
емкости, примыкающей
к
поршню
3
сервомотора.
При
минимальном открытии окон золотника
(s
2mln
)
давление
в
емкости максимальное (ртах)
и
турбина несет макси-
мальную нагрузку.
В
другом крайнем рабочем положении
зо-
лотника
(s
2
i„ax)
давление жидкости минимальное (р
тш
)
и
турбина
работает
на
холостом ходу.
В
этой схеме
при
падении давления
р
распределительные органы турбины закрываются
и
нагрузка
снижается. Размещение золотника
в
месте слива жидкости более
благоприятно
для
надежности работы системы,
чем
установка
его
в
месте нагнетания жидкости
(см. § 2.2).
Воспользуемся уравнением емкости
(10.34),
введя следующие
обозначения:
s
2
—
открытие окон золотника (вместо
т
2
)\ k —
коэффициент усиления;
T
s
—
время сервомотора (вместо
Т
в
(10.34); /
х
—
живое сечение неподвижного дроссьля
(x
mi
= 0);
Smax
=
s
2
ni,,x
— Sgmin —
рабочий
ход
золотника.
Уравнение сервомотора
в
этих обозначениях
примет
вид
T
s
x
inl
x
m
=
kx
s2
,
(10.74)
где
х
т
=
Ат/т
Ш1Х
;
x
s2
=
As
2
/s
2
,„,
x
;
T
s
=
F
m
jA;
(10.75)
k = (-dQ
2
/ds
2
)s
2m
JA; (10.76)
A
= (dQ
2
/dp - dQJdp) (p
max
- p
mln
); (10.77)
Pmax
—
Pmln
=
cm
mhJF',
S
2
rna
x —
рабочий
ХОД
ЗОЛОТНИКа
при ИЗ-
менении давления
от р
ш1п
до
р
тах
.
Здесь,
как
обычно, положительному направлению координаты
х,
п
,
например
при
увеличении нагрузки
на
турбину, соответствует
также положительное направление координаты
х
$2
—
закрытие
окон золотника
и
повышение давления
р. В
этом случае
dQ
2
/ds.
2
<
<
0, a k > 0.
Если
бы
золотник дросселировал жидкость, поступающую
из
напорного трубопровода,
то вид
уравнения
не
изменился
бы,
но вместо
х
$2
вошла
бы
переменная
x
Sl
, и
коэффициент усиления
был
бы
k = (dQJdSj)
s
lua
JA,
где dQ^dsj > 0.
168
Для, вычисления
k и T
s
воспользуемся формулами объемных
расходов несжимаемой жидкости сквозь живые сечения
/
х
не-
подвижного дросселя
и
s
20
b
2
—
окон золотника:
Qi
=
fii*i/2(PH-p)/p;
(
10
-
78
)
Q
2
=
sAu.
2
/2
(р-р
с
)/р,
(10.79)
где
р
н
и р
с
—
давления перед дросселем
и в
сливе
за
окнами
золотника.
Исходя
из
этих уравнений, найдем выражения производных:
dQ
2
/ds
2
=
Ь
2[
х
2
/2(р
0
-Ре)/Р; (
10
-
8
°)
dQjdp =
-0,5(2/p)°-
5
/
lf
t
1
/А.-РО*.
(
10
-
81
)
dQ
2
/dp = 0,5
(2/р)
0
-
5
s
20
W/>o - Рс
(Ю.82)
и размерной постоянной саморегулирования
по
уравнению
(10.77)
А
= 0,5
(2/р)
0
-
5
, [(siob^JV
ро - р
с
) +
+ (fl\h./V Рн —
Ро)1 (Ртах
- Pmln)- (10.83)
В
(10.81)—(10.83)
нулевыми индексами отмечены величины
переменных
при
рассматриваемом равновесном режиме.
Исследуем
на
примерах структуру динамических постоянных,
чтобы сравнить эффективность сервомоторов
с
дроссельными
и
отсечными золотниками.
Пример математической модели. Допустим,
что
Рн
-
Ртах
=
(Ртах
—
Ртт)/
2
'
Рп ~ Рс = 2
(Ртах
—
Pmln)'<
ТОГДа
р
н
—
р
га1п
= 1,5
(р
тах
— Р
т
щ)' Рн —
Ртах
= Ртт Рс-
При этом расход жидкости сервомотором
в
пределах рабочего хода
поршня m
max
и
золотника
s
raax
= s
2 ma
x —
s
2mm
изменяется
на
величину
Qmax
-
Qmm
=
/lUl
(2/p)
0
'
5
(У>я - Pmm - VPn ~
Pmax),
где
для
равновесных режимов принято
Q
w
= Q
20
= Qo-
Найдем производные
от
расходов
по
параметрам согласно
(10.80)—(10.83), а
также
(10.78) и (10.79) для
следующих режи-
мов:
в положении золотника
s
2 max
при p
mln
Smax
(<3Q
2
/dS
2
)
S2
max
=
S
max
b#
2
V
2
(Pmln
" Pc)/P =
(Smax/S
2
„,ax) Qmax',
в положении золотника
s
2 mln
при p
max
s„,ax
(dQ
2
/ds
2
)
S2min
=
«шаАНа
Y 2 (p
max
— p
c
)/p =
=
(^шах/^г min)
Qmln>
169
для дросселя
в
положении золотника 5
2т1п
(при
р
0
=
Ршх>
№ь'др)
Ртах
= -
0,5 (2/р)0.5
fllll
,
^.
pJ(h
_
ртах)
=
=
—
0.5Qmin/(p
H
-/>тах);
для дросселя
в
положении золотника
s
2max
(при р
0
=
РпЛп
)
(
d
^
d
P)
Pmin
= -
0,5
(2/p)0.5
/lfAl
,
-p—p^Hjb
_
pmin)
=
=
—
0,5Q
max
/(p
H
-
Pmn
)-
в положении золотника
s
amln
и
давлении
p
max
(dQi/dp)
Pmax
=
0,5
(2/р)о.б
S2mlnb
^
2
y/p
max
-
p
J
(Pm!a
_
pc) =
=
0,5
<2
т1
„/(р,
пах
— p
c
);
в положении золотника
s
2max
и
давлении
p
mln
(
^in
=
0>5 (2/p)o.e
S2max
b
2fi21
p
mlD
-pJ
{Pmia
_ ^
=
=
0,5Q
max
/(p
mm
-
Ро
).
n„o7i°n
7тГ
СЬ
ЭТИМИ вы
Р
ажени
™и производных, получим согла-
сно
(Ш.,,)
следующие формулы
для
определения постоянной само-
регулирования
А:
и
для режима
р
0
=
Ртах
А
Р
тах
=
0,5Q
ni]n
[(p
max
-
Pc
)-i
+ (рн
_
/?max)
-
1] (у0шах
_
pmin);
для режима
р
0
=
/>
min
Л
РпИп
=
O.SQmax [(p
mln
-
РсГ
1
+
(Рн
-
р
т1п
П
(p
max
-
p
mln
).
Из двух последних уравнений следует,
что
А
Р
тах
=
(4/3)
Q
mln
, Л
Рт;п
=
(4/3)
Q
max
,
а, значит, время сервомотора согласно
(10.75)
меняется
в от-
ношении
•^Pmax/^Vmin
=
Qmax/Qmln-
Отношение
же
расходов находится согласно
(10.78)
или
(10.79)
Qmax/Qmin
= [(р
н
-
Pmin)/(p
H
-
Ртах)]
0,5
= | 3.
Из этого примера видим,
что в
сервомоторе
с
дроссельным
зо-
лотником расход жидкости меняется
в
широких пределах
в
зави-
висимости
от
режима работы. Вместе
с тем для
любого режима
работы расход должен быть достаточно большим, чтобы величина
А
оыла высокой,
а
время сервомотора согласно
(10.75)
—
малым.
170
Сравнение сервомоторов
с
дроссельными
и
отсечными золот-
никами. Критерием
их
динамической равноценности должно
быть равенство передаточных функций, выраженных
(7.6),
при-
менительно
к
апериодическому звену
k/(T
s
s
+ 1) =
idem. (10.84)
При этом условии
оба
сервомотора имеют одинаковые частот-
ные характеристики. Значит идентичность обеих моделей дости-
гается
при
одинаковых
T
s
и k.
Условие
T
s
=
idem
рассмотрим
в
предположении одинакового
рабочего объема сервомотора,
т. е.
Fm
mdX
=
idem.
При
этом
время эквивалентного сервомоторас отсечным
золотником
по
(10.56)
и
(10.58)
T
s3KB
=
Fm
max
/Q
9K
*, (10.85)
где Q
3KB
=
А —
эквивалентный расход жидкости, полученный
из сравнения динамических констант
(10.75)
и
(10.85).
Чтобы оценить соотношение исследуемых расходов
для
серво-
мотора
с
дроссельным золотником, рассмотрим наибольшее время
T
sp
, для
которого
в
последнем примере было получено
А =
=
(4/3)
Q
mln
« (3/4)
Q
max
.
Таким образом,
в
данном примере максимальный расход сквозь
окна дроссельного золотника
на 25 %
превосходит эквивалент-
ный расход сквозь отсечной золотник,
и
соответственно возра-
стает производительность насоса.
Что касается коэффициента усиления,
то для
сервомотора
с отсечным золотником согласно
(10.57)
он
равен единице
(k = I).
Чтобы
для
сервомотора
с
дроссельным золотником выдержать
критерий
k =
idem,
имея
в
виду
(10.76),
надо выполнить условие
А
=
(—dQ
2
lds
2
)
s
max
. В
принципе этого можно достигнуть
за
счет
профилирования окон золотника
(b = / (s)).
При проектировании сервомоторов сравнение
их
динамических
качеств
и
расходов жидкости следует выполнять
с
учетом профи-
лирования окон, требуемой перестановочной силы
и
масс, при-
веденных
к
поршню.
Для исправления недостатков сервомоторов
с
одним дроссель-
ным золотником следует искать принципиально новые структур-
ные построения.
Золотники двойного дросселирования. Динамические свойства
сервомотора могут быть существенно улучшены, если вместо
не-
подвижного дросселя
1
(рис.
2.7)
ввести второй дроссельный
зо-
лотник
[20, 21]. В
системах регулирования одного параметра
оба золотника конструктивно можно объединить
в
один,
с
двой-
ным дросселированием
(см. § 2.2 и
рис.
2.8)
.Этот золотник
мо-
жет поддерживать приблизительно одинаковый расход жидкости
при всех равновесных режимах работы,
что
существенно упрощает
гидравлическую систему регулирования.
171
Уравнение сервомотора
с
двумя раздельными дроссельными
золотниками отличается
от
(10.74)
лишь правой частью,
где
дол-
жны быть отражены импульсы
как
от
первого
(x
Sl
),
так
и от
вто-
рого
(х
$2
)
золотников. Обозначив коэффициенты усиления
при
координатах золотников соответственно
k' и k",
получим
T
s
x
m
-j~x
m
= k'x
Sl
— k"x
s
„ (10.86)
где
k' =
(dQJdSj)
s
m
JA;
k" =
(dQ
2
/ds
2
)
s
2m
JA.
Для
постоянных
же
T
s
и А
сохраняются выражения
(10.75)
и
(10.77).
Если координаты золотников
x
Sl
и x
Sl
жестко между собой
связаны, можно
оба
золотника объединить
в
один
с
координатой
x
s
=
s/s
raax
и
коэффициентом усиления
при ней
k. В
таком случае
в правой части уравнения
(10.86)
будет один член,
как
и в
(10.74),
и
оно
примет
вид
T
s
x
m
-\-x
m
= kx
s
,
(10.87)
г
Де
k =
(dQJds
—
dQJds)
s
m
JA.
(10.88>
Здесь структура коэффициента усиления принципиально измени-
лась из-за переменного дросселирования жидкости
при
входе
в звено.
Идея этого золотника: вторым, переменным дросселированием
усилить эффект первого дросселирования. Если, например, уве-
личивается открытие окон первого дросселя
и
расход
Q
1
возра-
стает
(dQ
1
/ds
1
>
0),
то
окна второго дросселя должны прикрыва-
ться,
а
расход
Q
2
—
уменьшаться
(dQ
2
/ds
2
< 0).
Оба
эффекта
при
перемещении золотника складываются
и
увеличивается интенсив-
ность изменения давления.
При
этом
и
заданная разность давле-
ний
р
так
— р
т1п
достигается
при
меньшем ходе золотника
s
max
.
Действительно, если
для
среднего давления
р
ср
выполнить
окна
так,
чтобы
dQ^ds
=
—dQ
2
/ds, то
коэффициент усиления
/е в
(10.88)
удваивается
при
сохранении размеров окон каждого ряда
золотника такими
же, как
в
сервомоторе
с
одинарным золотником.
Если
же,
по-прежнему, поставить задачу выполнения критерия
(10.84),
а
значит,
k =
idem
и T
s
=
idem,
то ход
золотника
s
можно
в два
раза уменьшить, сохранив неизменной разность
Ртах
—
Pmin-
При
этом, чтобы время сервомотора осталось преж-
ним, придется
все же
выбрать достаточно большие живые сечения
окон золотника
и
тем
самым обеспечить приблизительно такой
же
расход жидкости Q
3KB
,
как
при
одинарном золотнике.
Главное преимущество золотника двойного дросселирования:
расход жидкости, выбранный
для
режима среднего давления при-
близительно сохраняется таким
же во
всем диапазоне
от р
т1п
до
р
тах
,
тогда
как для
одинарного золотника этот расход сильно-
возрастает
(в
рассмотренном примере
в 1,7
раза)
и
соответственно»
меняется время сервомотора
и
производительность насоса.
172
ГЛАВА
П.
НЕКОТОРЫЕ ОБЩИЕ
ЗАДАЧИ
ДИНАМИКИ РЕГУЛИРОВАНИЯ
В
гл. 10
основные элементы систем регулирования
па-
ровых турбин
и
газотурбинных установок были представлены
в виде типовых звеньев. Простейшие структурные схемы таких
динамических систем состоят
из
апериодических, интегрирующих
и колебательных звеньев
(см.
гл. 7).
Результаты исследования
динамических свойств различных комбинаций типовых звеньев
можно широко использовать
для
оценки качества
и
выбора
ос-
новных параметров систем регулирования второго порядка мно-
гих энергетических машин. Этим общим задачам теории регули-
рования машин посвящена данная глава.
§
11.1.
ДВА
АПЕРИОДИЧЕСКИХ ЗВЕНА
Исследуем динамические свойства структурной схемы,
в состав которой входят
два
последовательно включенных аперио-
дических звена
(рис. 11.1). К
такой структурной схеме очень часто
приходим, решая задачи динамики простейших систем регули-
рования, состоящих, например,
из
идеального регулятора
—
кинематического звена, сервомотора—апериодического звена,
ротора турбины
или
емкости
—
тоже апериодического звена.
Уравнения движения. Опишем движение динамической
си-
стемы дифференциальными уравнениями
в
операторной форме,
отметив выходные переменные величины
и
константы индексами,
означающими номера звеньев,
(7\р
+ 1)
Xi
=
thx„;
'{Т
2
р +
1)
х
2
= k
2
x
x
, (П.1)
где
х
вх
—
входная величина
в
первое звено.
Частотные характеристики. Передаточная функция системы
(11.1)
находится согласно
(8.2) W
(s)
= W
x
(s) W
%
(s)
или
W (s)
=
Ma/K^is
+
1)
(T
2
s +
1)].
(П.2)
Частотная характеристика получается
из
(11.2)
подстановкой
s =
too.
После простых преобразований запишем
ее в
таком виде:
W (ш)
=
ЙА
[1 -
7Vr
2
(D
2
- (7\ + Г
2
)
ш]/[(1
-
7\7>
2
)
2
+
+
(7\ + Т
2
У
со
2
].
(П.З)
а)
Хвх
f
W,(S)
Xi
Wz(s)
Хг
»
W,(S)
Wz(s)
8)
Х1
А
-ED-
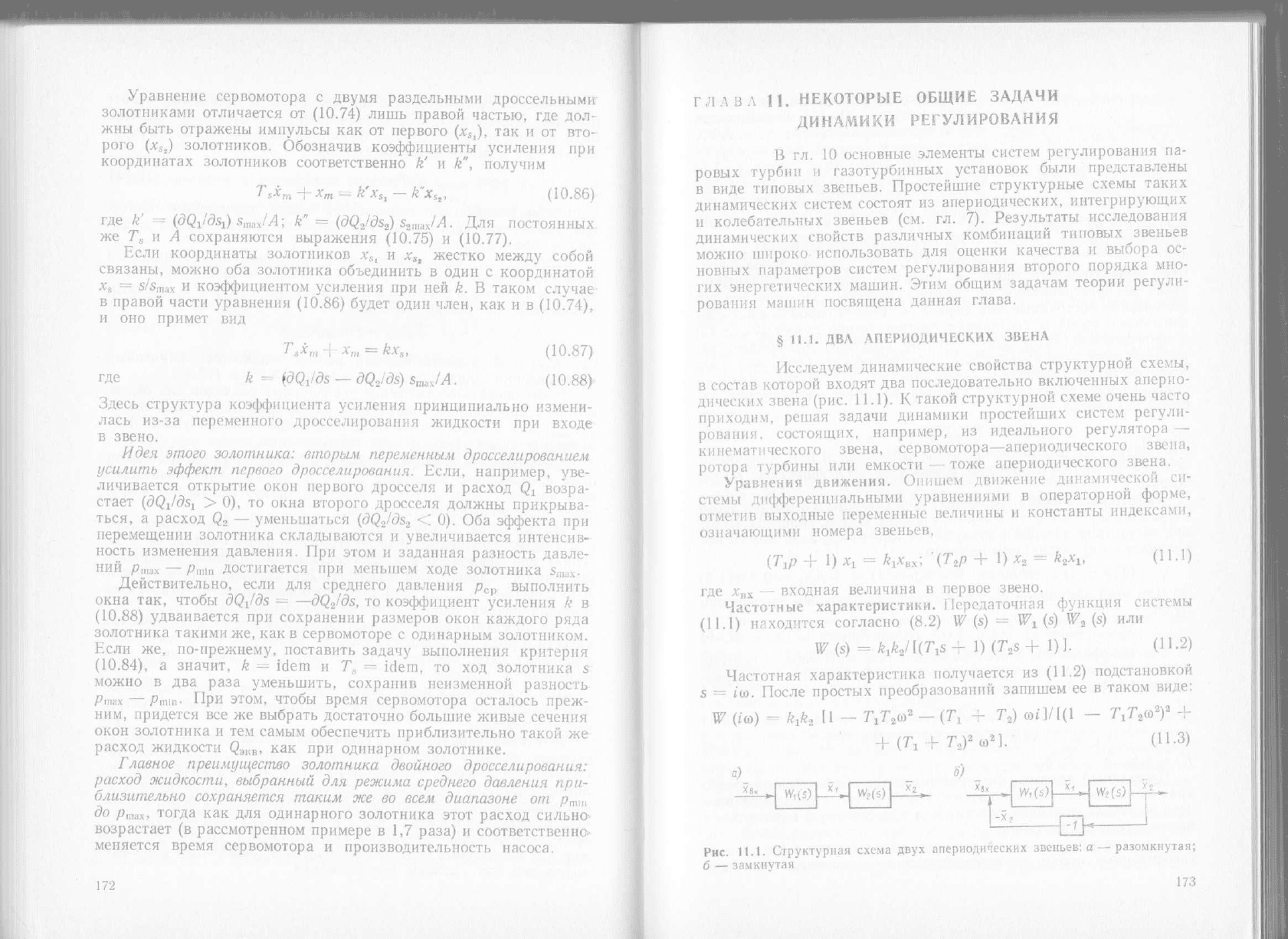
Рис.
11.1. Структурная схема двух апериодических звеньев:
а —
разомкнутая;
б
—
замкнутая
173
iV(w)i
0 И
Рис.
11.2. АФХ
двух
риоднческих звеньев
При положительных значениях всех
коэффициентов
в (11.2)
мнимая часть
W (ш)
всегда отрицательна,
т. е. АФА
расположена
в
нижней полуплоскости
(рис.
11.2) При
этом точка
(—1,0)
не может быть охвачена годографом
W (icy), и
система всегда устойчива,
что
очевидно также
из
критериев Гурвица
(см.
§ 6.1). .
По существу уравнение
(II.2)
сов-
падает
с (7.16) -
передаточной функ-
цией колебательного звена,
и
свойства такого эквивалентного
звена распространяются
на
данную систему.
Но Для нее ди-
намические постоянные
при
первой
и
второй производных свя-
заны между собой
и
составляют соответственно сумму
(7\ + /«)
и произведение (7\:Г
2
) одних
и тех же
констант.
Это
придает
эк-
вивалентному звену некоторые специфические свойства.
1ак,
в частности,
из
уравнения, аналогичного
(7.21),
следует,
что
рас-
сматриваемая динамическая система
не
имеет резонансной
ча-
стоты, поскольку всегда
(Г, +
T
2
fl2T
x
T
2
> 1. О
1
-
4
)
Это значит,
что
амплитудная характеристика
А (со) —
величина
вектора
W (to) —
монотонно убывает
во
всем диапазоне роста
частот.
Характеристическое уравнение.
Для
системы, замкнут
о и
главной обратной связью
(см. рис 11.1, о),
при отсутствии внешнего возмущения вместо
х
пх
надо ввести
ко-
ординату
— х
2
,
после чего получим
(7> + 1)
Xl
+
k
lXi
= 0; (Т
2
р -|- 1) х
2
-
к
2
Хг
= 0. (11.5)
Для этой замкнутой системы характеристическим уравнением
будет
ТгТ^
+ (7\ + Т
2
) s + 1 + *А = 0- <
] 1
'
6)
Все коэффициенты этого уравнения положительны,
и
система
всегда устойчива,
что уже
было отмечено. Найдем корни урав-
нения
(11.6) s = а ± cot, где
(П-7)
•0,5 (77*+ 7?');
(11.8)
со
-а | (4(1 -- К) 0/(1 4- В)
2
) - 1;
К
= 9 = ТУГ,.
Переходный процесс.
Раз
найдены корни характеристического
уравнения, может быть построен
и
исследован переходный про-
цесс
в
рамках линейной задачи.
Его
качественную оценку дают
нижеследующие критерии.
Условие апериодичности процесса
вещественные корни характеристического уравнения.
174
Как сле-
дует
из (11.8), это
условие апериодичности определяется нера-
венством
(1 + ТС) 9/(1 + 0)
2
< 0,25. (11.9)
Если
8->• 0, то
критерии
(11.9)
всегда выполняется.
Это
очевидно,
так как при 7\ -»• 0
первое звено становится кинемати-
ческим
и его
уравнение
в
системе
(11.1)
—
алгебраическим.
В
диа-
пазоне
0 < 8 < 1 при
заданном коэффициенте усиления
К
левая
часть неравенства
(11.9) с
ростом
6
также постепенно возрастает
и зона апериодических процессов сужается.
В
случае
6 = 1
критерий
(11.9) не
удовлетворяется
при
любой положительной
величине
К. При
этом значении
8
функция
8/(1 + в)
2
достигает
максимума.
В
области
в > 1
вновь возможны апериодические
процессы
при
коэффициентах усиления
К,
удовлетворяющих кри-
терий
(11.9).
Этот анализ показывает,
что при
сближении динамических кон-
стант обоих звеньев система проявляет склонность
к
колебатель-
ным процессам, хотя резонансной частоты согласно
(11.4) не
существует.
Для комплексных корней решение системы
(11.1)
имеет
вид (9.4)
х,
= €'
л
(С
х
cos Ы + С
2
sin со*). (11.10)
Критерии динамического подобия процессов примут более
общий
и
простой
вид,
если решение
(11.10)
перепишем
для от-
носительного времени
г = t/i
0
, где т
0
=
2л/со
—
условный период колебаний.
Подставив
t -
?2зх/со
в (11.10),
получим
х
2
=
е
<
2яа
/
м
>'
(Ci cos2 nt + С
2
sin 2л?). (11.11)
Согласно
(11.7) и (11.8)
можем записать
а/со
=
—[(4(1
+ К) 8/(1 +8)
2
)-
1]-°-
5
.
(11.12)
Таким образом, взяв
за
параметр относительное время,
мы
представили
х
2
как
функцию постоянных интегрирования, коэф-
фициента усиления
К и
отношения динамических констант
8.
Полученное решение позволяет исследовать процесс регулирова-
ния
при
определенных начальных условиях,
по
которым находя-
тся постоянные интегрирования
С
г
и С
2
.
Показатели процесса регулирования. Рассмотрим случай, когда
в начальный момент происходит возмущение регулируемой вели-
чины
х
2
за
вторым звеном (например, частоты
х
ы
за
объектом регу-
лирования). Введем ступенчатое возмущение типа мгновенного
сброса
или
наброса нагрузки, которым
и
определятся постоянные
интегрирования.
Отсчет координат будем вести
от
нового положения равнове-
сия.
Если, например, турбогенератор
в
старом положении рав-
новесия
нес
максимальную нагрузку,
а
затем произошел полный
ее сброс,
то
динамическая система станет стремиться перейти
к но-
175
вому положению равновесия
на
холостом ходу.
В этом случае
в
начальный момент времени
i = 0
координата первого звена (например,
ход
х
т
сервомотора) будет отстоять
от
нового
положения равновесия
на
величину
А'
10
>
О,
равную полному рабочему ходу сервомотора,
а координата второго звена
—
в
данном прн-
Рис.
и.з.
Началь-
мере частота вращения
— на
величину
х
20
<
О,
ные
условия
про-
равную коэффициенту неравномерности
(рис.
цесса
регулирова-
11.3). Для
этих начальных условий непосред-
H
'
ls,
j_
ственно
из
(11.11)
имеем
С
х
= х
20
.
же.ше^равновесия;
Чтобы ОПрвДеЛИТЬ ПОСТОЯННУЮ
С
2
,
ЗЭПИШеМ
ние~равновесия
ЛОЖе
'
ВТ0
Р
0е
И3
УРЗВНеНИЙ
(11.5)
При
f =
О
(ю/2я)
Т, (*
2
),
=0
+ х
20
=
k
2
x
10
.
(11.13)
Дифференцированием уравнения
(11.11)
найдем производную
(x
2
)i ()!.=
;
(2яа/со)
С
х
+
2яС
2
и, подставив
ее в
(11.13),
получим
со7\> [(а/со)
С
х
+ С
2
] =
k
2
x
w
— х
20
.
(11.14)
Из
(11.7)
следует
7\а =
—0,5
(1
+0), а так
как
можно
за-
писать тождество соГ
2
=
(со/а) (Т
2
/Т
х
)
Т
х
а, то,
подставив
в
него
найденное значение
7\а,
получим
соТ
2
=
—0,5
(со
а)^(11+
9)/9.
Дополнительным начальным условием пусть будет нулевая
скорость первого звена
(х
х
=
0),
что
характерно, например,
для
сервомотора
в
момент ступенчатого возмущения
по
частоте вра-
щения.
В
этом случае
из
первого уравнения
(11.5)
при / = 0
устанавливается связь
х
10
—
—k
x
x
20
,
где
k
x
= 1/6, а
знаком минус
отмечено,
что
клапаны
(их
координата
х
т
)
подняты
над
уровнем
нового состояния равновесия
(х
ы
= х
т0
>
0),
тогда
как
частота
вращения находится ниже этого уровня
(х
20
= х
а0
< 0).
Составленные
для
определения
С
2
выражения
и
уравнения
(11.12)—(11.14)
доказывают,
что эта
постоянная интегрирования
зависит
от
начальных значений координат, коэффициентов уси-
ления
и
отношения динамических констант
0 =
Т
х
/Т
2
.
После
алгебраических преобразований уравнения
(11.14)
величину
С
2
можно представить
в
виде функции
[21
]
С
2
=
Zx
20
,
(11.15)
где
Z
=
[1
-
26 (1
+
К)1{\
+e)]/i
[46(1 -t-
K)l{\ Н-
в)
2
]
- 1.
Динамический заброс регулируемого параметра.
В
конце пер-
вого размаха, когда
/ = i
lt
величина регулируемого параметра
176
достигает максимальной вели-
чины х
1шах
.
В
этот момент про-
изводная
х
2
= 0, и
указатель
идеального регулятора (напри-
мер,
муфта регулятора частоты
вращения)
на
мгновение оста-
навливается, перед
тем как
начать движение
в
другую сто-
рону. Дифференцированием
(11.11)
с
последующей подста-
новкой
/ = i
x
в
уравнение
х
2
= 0
найдем
t
x
=
(1/2л)
arctg
[(С], (а/со)
+
г С
2
)/(С
2
(а/со)
—d)),
(11.16)
2.0
1.0
0,5
0,2
N
0,2
N
В
л
w
#>
У
г
0 A 2 1 S 8 KB
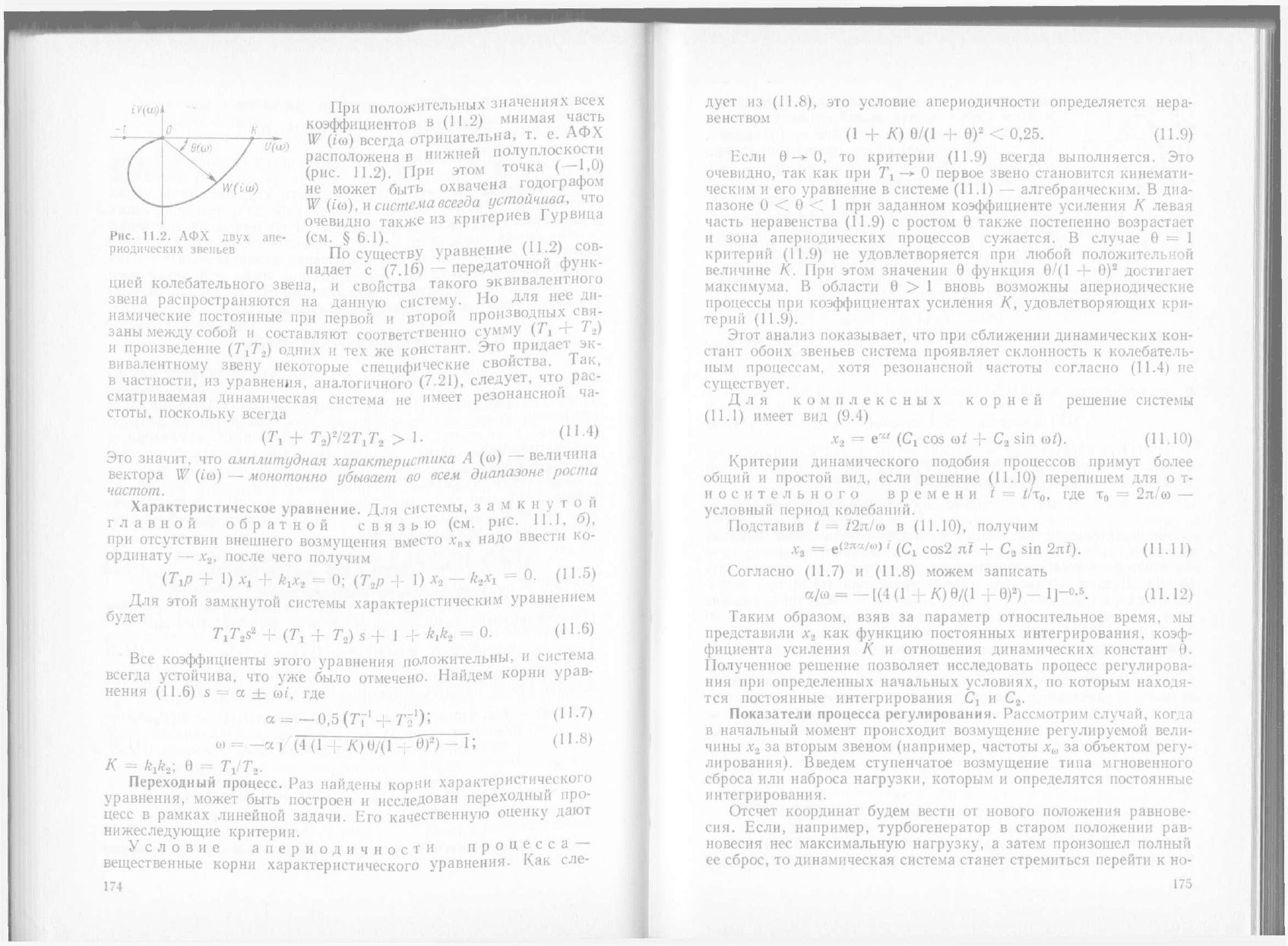
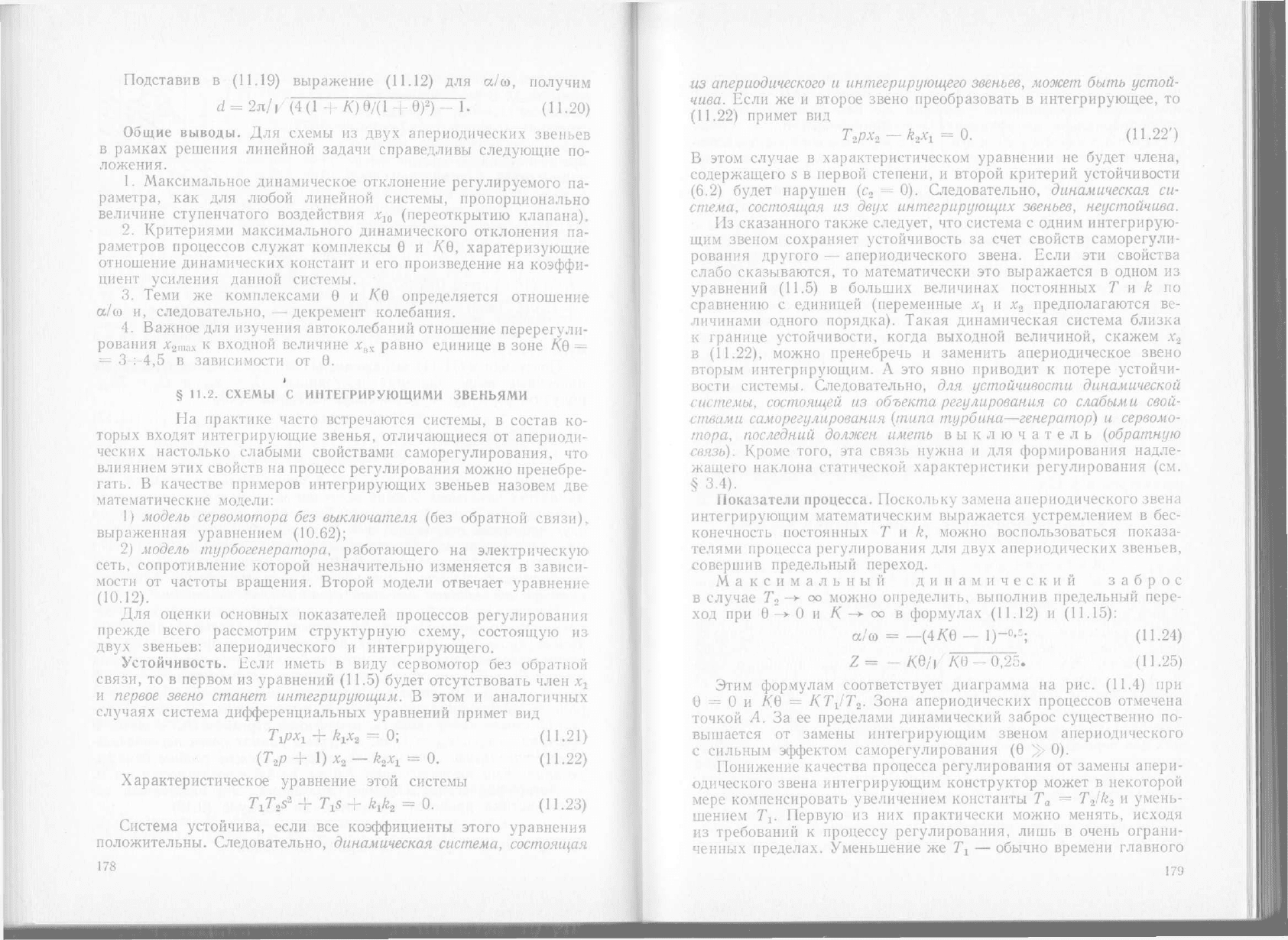
Рис.
11.4.
Динамический заброс
регу-
лируемого
параметра x
2m!t
Jx
20
в
зави-
симости
от
критериев подобия
KQ и 0
где
а/со
вычисляется
по
фор-
муле
(11.12).
Подставив
в
(11.11)
выражение
(11.16) для
времени
/^ а
также
найденные выше значения постоянных
С
х
= х
20
и С
2
=
Zx
20
,
получим формулу, предложенную автором
[21
],
Xsouu
=
е
2л
1
(COS
2л/
х
+
Zsin
2nt
x
)
х
20
,
(11.17)
а
в
единицах времени
*2ппх
=
е
а/
>
(cosco/i
I Z
sin
<at
x
)
х
20
.
(11.18)
Таким образом доказано,
что
в
относительном времени
для
принятых начальных условий величина максимального отклонения
регулируемого параметра может быть представлена
как
функция
двух критериев подобия:
К и 6.
Величина
x
imM
пропорциональна
начальному скачкообразному возмущению
х
20
.
Из
формулы
(11.17)
следует,
что при
заданных
К, 6 и х
20
максимум регулируемого
параметра достигается
при
одном
и том
же
времени
i
x
незави-
симо
от
абсолютных значений динамических констант.
На
рис.
11.4
даны максимальные динамические забросы
в за-
висимости
от
критериев
6 и
/Сб.
Область
OA
охватывает апериоди-
ческие процессы.
При
малых значениях,
6,
например
в
случае
очень малого времени сервомотора
7\ = T
s
и
большого времени
ротора
Т
2
=
Т
ш
, эта
область расширяется
до
значения
KQ
-*•
0,25
за счет очень большого коэффициента усиления
К.
При
6 = 1
область апериодических процессов вырождается. Важный физи-
ческий смысл имеет область, отмеченная отрезком
ВС: в
точке
В
величина
—
х
2тах
/х.,
0
= 1, т. е.
первый размах равен первоначаль-
ному отклонению.
Это
показатель сравнительно слабого демпфи-
рования.
Ему
соответствует
КО ж
3-:-4,5
в
зависимости
от 0.
Логарифмический декремент колебаний.
Эта
важнейша
ха-
рактеристика процесса находится
по
формуле
(9.19)
d
=
—ат
0
,
(11.19)
где
т
0
=
2я/со
—
условный период колебания.
177
Подставив
в
(11.19)
выражение
(11.12)
для
а/со,
получим
d
=
2n/|-"(4(l
+
/С)
8/(1
+8)
2
)-
1.
(11.20)
Общие выводы.
Для
схемы
из
двух апериодических звеньев
в рамках решения линейной задачи справедливы следующие
по-
ложения.
1.
Максимальное динамическое отклонение регулируемого
па-
раметра,
как для
любой линейной системы, пропорционально
величине ступенчатого воздействия
x
i0
(переоткрытию клапана),
2. Критериями максимального динамического отклонения
па-
раметров процессов служат комплексы
9 и KQ,
харатеризующие
отношение динамических констант
и
его
произведение
на
коэффи-
циент усиления данной системы.
3. Теми
же
комплексами
6 и KQ
определяется отношение
а/со
и,
следовательно,—декремент колебания.
4. Важное
для
изучения автоколебаний отношение перерегули-
рования
Xjnux
к
входной величине
х
вК
равно единице
в
зоне
KB
=
— З-т-4,5
в
зависимости
от 9.
§
11.2.
СХЕМЫ
С
ИНТЕГРИРУЮЩИМИ ЗВЕНЬЯМИ
На практике часто встречаются системы,
в
состав
ко-
торых входят интегрирующие звенья, отличающиеся
от
апериоди-
ческих настолько слабыми свойствами саморегулирования,
что
влиянием этих свойств
на
процесс регулирования можно пренебре-
гать.
В
качестве примеров интегрирующих звеньев назовем
две
математические модели:
1)
модель сервомотора
без
выключателя
(без
обратной связи),
выраженная уравнением
(10.62);
2)
модель турбогенератора, работающего
на
электрическую
сеть,
сопротивление которой незначительно изменяется
в
зависи-
мости
от
частоты вращения. Второй модели отвечает уравнение
(10.12).
Для оценки основных показателей процессов регулирования
прежде всего рассмотрим структурную схему, состоящую
из
двух звеньев: апериодического
и
интегрирующего.
Устойчивость. Если иметь
в
виду сервомотор
без
обратной
связи,
то в
первом
из
уравнений
(11.5)
будет отсутствовать член
х
г
и первое звено станет интегрирующим.
В
этом
и
аналогичных
случаях система дифференциальных уравнений примет
вид
T
lPXl
+ k
x
x
2
= 0;
(11.21)
(Т
2
р
+ \)х
2
— k
2
x
x
= 0.
(11.22)
Характеристическое уравнение этой системы
7\T
2
s
2
+ T
x
s + k
x
k
2
= 0.
(11.23)
Система устойчива, если
все
коэффициенты этого уравнения
положительны. Следовательно, динамическая система, состоящая
178
из апериодического
и
интегрирующего звеньев, может быть устой-
чива. Если
же и
второе звено преобразовать
в
интегрирующее,
то
(11.22)
примет
вид
Т
2
рх
2
— k
2
x
x
= 0.
(11.22')
В этом случае
в
характеристическом уравнении
не
будет члена,
содержащего
s в
первой степени,
и
второй критерий устойчивости
(6.2)
будет нарушен
(с
2
= 0).
Следовательно, динамическая
си-
стема, состоящая
из
двух интегрирующих звеньев, неустойчива.
Из сказанного также следует,
что
система
с
одним интегрирую-
щим звеном сохраняет устойчивость
за
счет свойств саморегули-
рования другого
—
апериодического звена. Если
эти
свойства
слабо сказываются,
то
математически
это
выражается
в
одном
из
уравнений
(11.5)
в
больших величинах постоянных
Т и k по
сравнению
с
единицей (переменные
х
г
и х
2
предполагаются
ве-
личинами одного порядка). Такая динамическая система близка
к границе устойчивости, когда выходной величиной, скажем
х
2
в
(11.22),
можно пренебречь
и
заменить апериодическое звено
вторым интегрирующим.
А
это
явно приводит
к
потере устойчи-
вости системы. Следовательно,
для
устойчивости динамической
системы, состоящей
из
объекта регулирования
со
слабыми свой-
ствами саморегулирования (типа турбина—генератор)
и
сервомо-
тора, последний должен иметь выключатель (обратную
связь).
Кроме того,
эта
связь нужна
и
для
формирования надле-
жащего наклона статической характеристики регулирования
(см.
§
3.4).
Показатели процесса. Поскольку замена апериодического звена
интегрирующим математическим выражается устремлением
в
бес-
конечность постоянных
Т и k,
можно воспользоваться показа-
телями процесса регулирования
для
двух апериодических звеньев,
совершив предельный переход.
Максимальный динамический заброс
в случае
Т
2
—*•
оо
можно определить, выполнив предельный пере-
ход
при 0
->-
0 и К
-*•
оо в
формулах
(11.12)
и
(11.15):
а/со
=
—(4
KQ
—
1)-°-
5
;
(11.24)
Z= -K8/I КО
-
0,25. (11.25)
Этим формулам соответствует диаграмма
на
рис. (11.4)
при
в
= 0 и KB —
KTJT
2
.
Зона апериодических процессов отмечена
точкой
А. За ее
пределами динамический заброс существенно
по-
вышается
от
замены интегрирующим звеном апериодического
с сильным эффектом саморегулирования
(9 > 0).
Понижение качества процесса регулирования
от
замены апери-
одического звена интегрирующим конструктор может
в
некоторой
мере компенсировать увеличением константы
Т
а
= T
2
/k
2
и
умень-
шением
7\.
Первую
из них
практически можно менять, исходя
из требований
к
процессу регулирования, лишь
в
очень ограни-
ченных пределах. Уменьшение
же
7\ —
обычно времени главного
179