Кириллов И.И. Автоматическое регулирование паровых турбин и газотурбинных установок
Подождите немного. Документ загружается.

сервомотора
T
s
—
служит сильным средством улучшения про-
цесса регулирования.
Для той
же
цели можно влиять
на
процесс
изменением коэффициента усиления
k
x
. Его
величина обратно
пропорциональна коэффициенту неравномерности
б.
Логарифмический декремент колеба-
ния
тем же
методом предельного перехода получается
из
фор-
мулы
(11.20)
d
=
2я/у
/
~Ш
- 1.
(11.26)
Общие динамические свойства системы
с
одним интегрирующим звеном, вместо апериодического, сущест-
венно ухудшаются.
При
слабых свойствах саморегулирования
оставшегося
в
этой системе апериодического звена
она
прибли-
жается
к
границе устойчивости.
В
таких случаях следует избегать
интегрирующих звеньев.
Так,
например, усилитель
без
выключа-
теля
не
пригоден
в
системах,
где
регулируемая величина (частота
вращения, давление)
в
пределах
ее
неравномерности слабо влияет
на динамику процесса.
То же
можно сказать
в
отношении малой
величины коэффициента неравномерности регулирования
б
(боль-
шого коэффициента усиления).
В
частности, выполненный анализ
приводит
к
заключению,
что
применение сервомотора
без
выклю-
чателя требует солидного обоснования
с
технической
и
экономи-
ческой точек зрения.
К
тому
же
современные технические средства
позволяют достаточно просто выполнять обратные связи. Вопрос
о роли интегрирующего звена
в
регуляторах систем управления
рассмотрен
в § 12.6.
§
11.3.
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ
ТРЕТЬЕГО ПОРЯДКА
Математическая модель третьего
порядка обобщает очень многие задачи проектирования
си-
стем регулирования паровых турбин
и
газотурбинных установок.
К
ним
относится классическая задача прямого регулирования
ча-
стоты вращения машины
—
апериодического
или
интегрирую-
щего звена
— и
регулятора
с
большими массами
—
колебатель-
ного звена.
Эта
задача была решена
в
конце прошлого века
И.
А. В ы ш н е г р а д с к и м [44]. К
аналогичной модели при-
водят
и
задачи непрямого регулирования
с
идеальным чувстви-
тельным элементом
и
двухкратным усилением исходящего
от
него сигнала
в
сервомоторах
—
апериодических звеньях, служа-
щих
для
перемещения регулировочных органов машины
—
апери-
одического
или
интегрирующего звена.
Так же
непосредственно
объект регулирования может содержать последовательно включен-
ные аккумуляторы энергии, имеющие свойства апериодических
звеньев.
Поскольку
все эти
многообразные инженерные задачи вопло-
щаются
в
одну
и ту же
математическую модель,
она
становится
180
универсальной,
и
изуче-
ние
ее
общих динамиче-
ских свойств весьма
по-
лезно
для
современного
машиностроения.
С
этой
точки зрения рассмотрим
некоторые общие свой-
ства динамических систем
третьего порядка.
Устойчивость. Свой-
ства рассматриваемой
мо-
дели выражены системой
линейных дифференциаль-
ных уравнений третьего
порядка
с
характеристи-
ческим уравнением третьей
степени
c
0
s
3
-f c
x
s
2
+
C
2
S
+
с,
= 0.
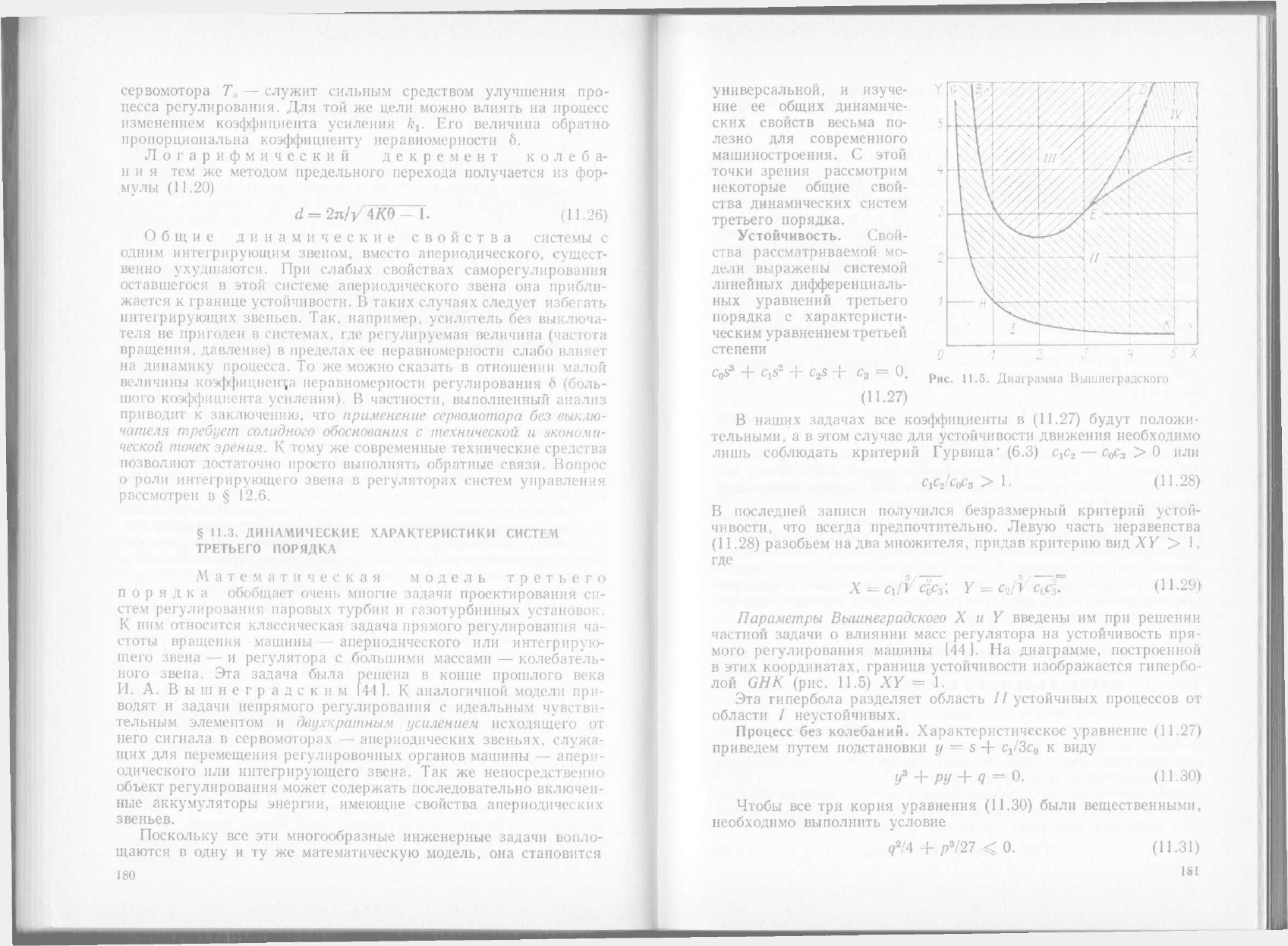
Рис.
11.5.
Диаграмма Вышнеградского
(11.27)
В наших задачах
все
коэффициенты
в
(11.27)
будут положи-
тельными,
а в
этом случае
для
устойчивости движения необходимо
лишь соблюдать критерий Еурвица'
(6.3)
с
х
с
2
—
с
0
с
3
>0 или
CJCZ/CQCS
!> 1.
(11.28)
В последней записи получился безразмерный критерий устой-
чивости,
что
всегда предпочтительно. Левую часть неравенства
(11.28)
разобьем
на два
множителя, придав критерию
вид
XY > 1,
где
Х
=
а/Ус
2
0
с
3
;
Y =
c
2
/Yc
c
ci.
(11.29)
Параметры Вышнеградского
X и Y
введены
им при
решении
частной задачи
о
влиянии масс регулятора
на
устойчивость пря-
мого регулирования машины
[44]. На
диаграмме, построенной
в этих координатах, граница устойчивости изображается гипербо-
лой
GHK
(рис.
11.5) XY = 1.
Эта гипербола разделяет область
//
устойчивых процессов
от
области
/
неустойчивых.
Процесс
без
колебаний. Характеристическое уравнение
(11.27)
приведем путем подстановки
у = s +
с
х
13с
0
к
виду
У
3
+ РУ +
Ц
= 0.
(11.30)
Чтобы
все три
корня уравнения
(11.30)
были вещественными,
необходимо выполнить условие
q
2
/4 +
Р
3
/27
< 0.
(11.31)
181
Выразив
р и q
через коэффициенты характеристического урав-
нения, получим условие апериодичности про-
цесса
в
параметрах Вышнеградского
F
2
X
2
— 4 (Y
3
+ X
3
) + 18YX — 27 ==г 0.
(11.32)
Кривая, изображающая апериодический процесс, имеет
эк-
стремум
или
монотонно стремится
к
новому равновесному режиму.
На диаграмме Вышнеградского
(см. рис. 11.5)
граница апериодических процессов
DEF
построена согласно
(11.32).
В
области
IV
между ветвями этой кривой характеристи-
ческое уравнение имеет только вещественные корни,
а в
области
между этими ветвями
и
осями координат
—
также комплексные
корни.
Монотонный процесс регулирования
возможен
и при
комплексных корнях. Если характеристическое
уравнение имеет вещественный
и
притом отрицательный корень
s
x
и
два
комплексных корня
с
отрицательной вещественной частью;
s
2
= а -4- coi и s
3
= а —• сог, то
условием монотонности процесса
будет
[44 ] '
2Х
3
— 9XY + 27 < 0. (11.33)
Приравняв нулю левую часть неравенства
(11.33),
получим
уравнение кривой
на
границе области монотонных процессов.
Эта область
/// на рис. 11.5
ограничена кривой
BED. В ней ха-
рактеристическое уравнение математической модели имеет один
вещественный
и два
комплексных корня.
Поскольку критерии, характеризующие процесс регули-
рования, выражены через коэффициенты характеристического
уравнения,
они
справедливы
для
любой линейной динамической
системы третьего порядка,
в
состав которой могут входить
в
раз-
личных комбинациях колебательное, апериодическое
и
интегри-
рующие звенья. Ниже рассмотрены практически наиболее важные
структурные схемы третьего порядка.
§
11.4.
ВЛИЯНИЕ МАСС РЕГУЛЯТОРА
НА ПРОЦЕСС РЕГУЛИРОВАНИЯ
—
ЗАДАЧА ВЫШНЕГРАДСКОГО
Исследуем систему прямого регулирования
с
регуля-
тором, имеющую значительную массу (колебательное звено).
В качестве объекта регулирования рассмотрим интегрирующее
или апериодическое звено.
Во
всех случаях будем пренебрегать
постоянным трением
в
регуляторе.
Колебательное звено
в
сочетании
с
интегрирующим звеном.
Чувствительный элемент представляет собой колебательное звено.
Его движение описывает уравнение
(10.46)
(Tjp
2
+ T
K
p+l)x
z
=
k
l
x
et
.
(11.34)
182
Объект регулирования
—
интегрирующее звено.
Его
динамику
выражает
(10.13)
Т
а
рх
ш
= х
т
. (11.35)
Здесь
х
ш
и х, —
относительные величины регулируемого пара-
метра
со и
перемещения
z
указателя (муфты) регулятора вместе
с клапаном турбины;
77, Т
к
и
Т
а
—динамические константы,
вычисляемые
на
основании
(10.43), (10.44) и (10.14); k
t
= 1/6 —
коэффициент усиления регулятора.
В этой структурной схеме пренебрегаем положительным свой-
ством саморегулирования агрегата, состоящего
из
турбины
и
генератора, имея
в
виду,
что это
идет
в
запас прочности движения
и,
к тому
же,
приводит
к
ясным выводам.
Для прямого регулирования перемещения клапанов
Am и
указателя регулятора
Аг
связаны уравнением
Am = aAz. (11.36)
Если полному рабочему ходу указателя регулятора z
max
соот-
ветствует максимальный
ход
клапанов m
max
,
то а =
т
шах
/г
шах
,
а тогда согласно
(11.36)
относительные
их
перемещения стано-
вятся равными
х
ш
х
гу
(11.37)
где
x
m
=
Am/m
max
;
x
z
=
Az/z
max
.
На основании
(11.37)
внесем изменение
в (11.35)
Т
а
рх
а
= х
2
. (11.38)
Как условились
в § 6.3,
входные
и
выходные величины обоих
звеньев имеют одинаковые знаки.
В
замкнутой
же
системе знак
исправляем включением
в
главную обратную связь кинематиче-
ского звена
с
передаточным числом
— 1. С
учетом этого
к
первому
звену подводится сигнал ~к
г
х
ы
,
а (11.34)
принимает
вид
(Пр
2
+ Т
к
р + 1) x
t
=
—k
lXw
.
(11.39)
Дифференцированием
(11.39) и
после этого подстановкой
в его
правую часть выражения
х
ю
из (11.38)
сразу получим
в
целом
для всей данной математической модели третьего порядка урав-
нение движения
(П/)
3
+Т
к
р
2
+ р +
^/Г
а
)х
2
= 0 (11.40)
Устойчивость. Характеристическое уравнение получим
за-
меной
р на s в (11.40). Все
коэффициенты этого уравнения будем
полагать постоянными
и
положительными
(см. § 10.1 и 10.3).
При этом условии устойчивость регулирования определится лишь
одним критерием
(6.3)
CiC
2
—
с
0
с
3
> 0,
(П.41)
183
где
с
0
= Ту, с\ = Т
к
; с, = 1; с, =
kjT
a
.
После подстановки этих выражений коэф-
фициентов
в
(11.41)
найдем критерий
устойчивости
Т
к
> k\Tj/T
a
.
(11.42)
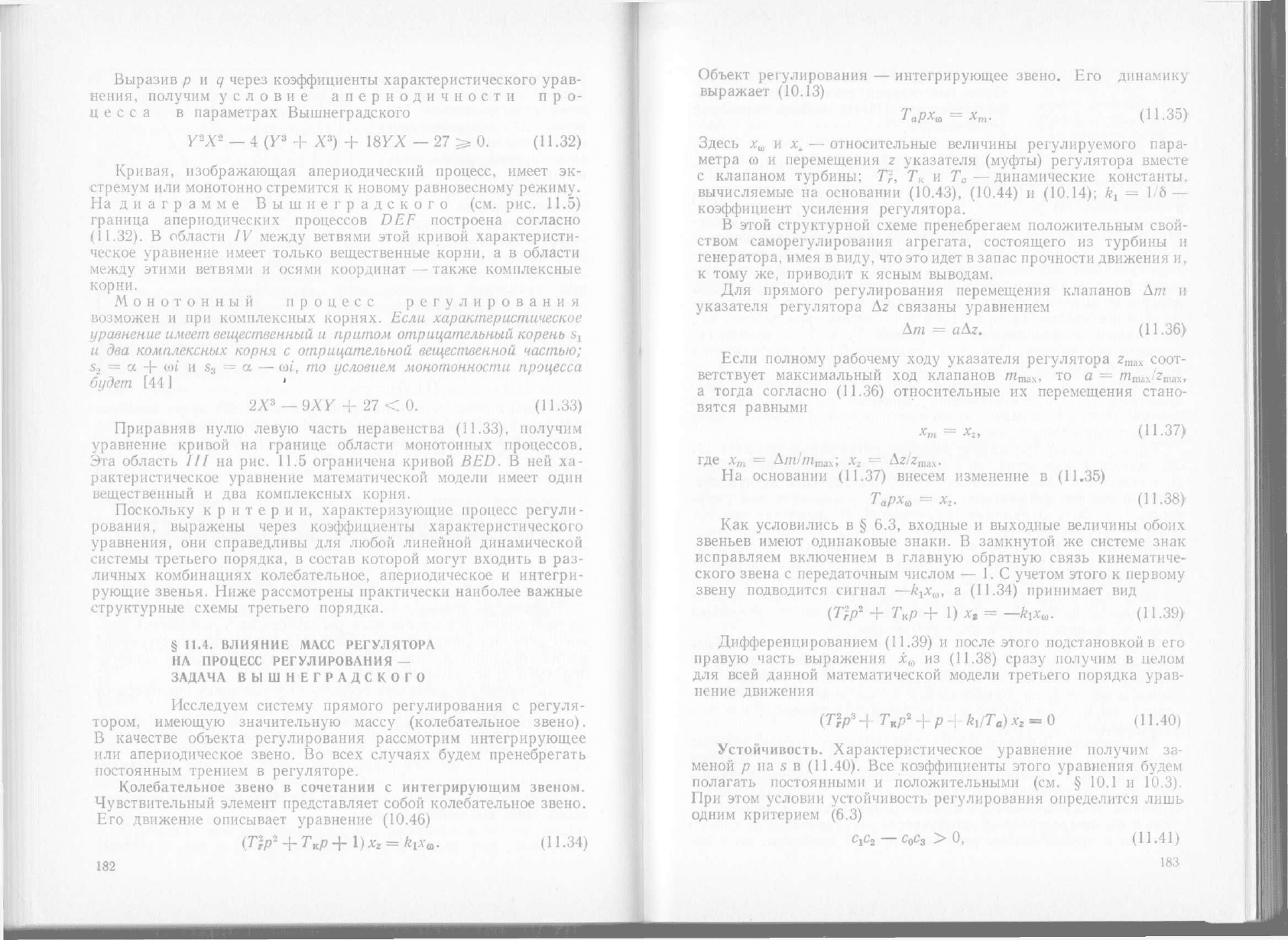
Граница устойчивости выразится урав-
Рис.
11.6.
Разграничение нением
областей
устойчивого
(А) у2 _ gу у /ц <ov
и
неустойчивого
(В) ре- * '
гулирования
Время ротора
Т
а
и
коэффициент усиле-
ния
k\ = 1/6
при
проектировании системы
регулирования задаются. Время регуля-
тора
Т\
зависит
от
его
конструкции,
и ее
можно также считать изве-
стной.
В
распоряжении конструктора остается время катаракта
Т
к
,
которое
он
должен выбрать
в
соответствии
с
временем регулятора.
В такой постановке задачи
в
(11.43)
надо считать произведение
8Т
а
постоянным коэффициентом,
а
времена
Т
г
и Т„ —
взаимосвя-
занными величинами.
При
этом уравнение
(11.43)
изображается
параболой
(рис.
11.6),
разделяющей устойчивую область
А от
неустойчивой
В.
Итак, введение катаракта, удовлетворяющего
критерию
(11.42),
обеспечивает устойчивое регулирование хода
машины даже
в том
случае, когда чувствительный элемент имеет
большую приведенную массу.
Если допустить предельное решение, когда неравенство
(11.42)
обращается
в
равенство,
то
колебания станут гармоническими.
Для генерации таких колебаний силы, действующие
на
чувстви-
тельный элемент регулятора, должны иметь характер
сил
упру-
гости,
т. е.
быть функциями перемещений.
В
уравнении центро-
бежного регулятора
(10.38)
этому условию
не
удовлетворяет
составляющая регулирующей силы (дА/ди>)
Асо.
Она и
раскачи-
вает систему регулирования. Катаракт
же,
компенсируя работу
раскачивающей силы
и
диссипируя энергию, может привести
систему
к
границе устойчивости. Если
же
диссипация энергии
в катаракте превосходит работу указанной части регулирующей
силы,
то
процесс становится затухающим.
Эффект саморегулирования оказывает влияние
на
темпы
из-
менения регулирующей силы
А, но не
может диссипировать раз-
виваемую
ею
энергию
во
время раскачки масс регулятора.
По-
глощать
же
энергию колеблющейся массы может
не
только
ка-
таракт,
но и
сухое трение
в
чувствительном элементе,
как это
будет доказано
в § 13.6.
Во времена Вышнеградского
для
паровых машин широко
применялись центробежные регуляторы
с
большими массами
грузов
и
муфты. Промышленность испытывала большие затрудне-
ния из-за постоянных колебаний частоты вращения машин.
Причины этих колебаний понимали неправильно,
и
знаменитые
тезисы Вышнеградского
об
устойчивости регулирования
не
только
привели
к
практическому решению крупной проблемы,
но и по-
184
служили отличной научной базой
для
развития общей теории
регулирования.
Вышнеградский пренебрегал свойством саморегулирования
па-
ровой машины, которое действительно было незначительно. Этому
примеру слишком широко стали следовать
и в
расчетах регули-
рования турбин, хотя
в них
эффект саморегулирования,
как
правило, проявляется достаточно сильно
(см. §
10.1).
Здесь уме-
стно продолжить решение задачи Вышнеградского
с
учетом влия-
ния саморегулирования турбины.
Для
этого заменим интегрирую-
щее звено апериодическим.
Колебательное звено
в
сочетании
с
апериодическим звеном.
Рассмотрим систему дифференциальных уравнений
для
регуля-
тора прямого действия
(11.34)
и для
турбины
как
апериодического
звена
(10.10)
с
заменой
х
т
на x
z
:
(Tip
2
+ Т
к
р + \)х
г
=
—kiX
a
, (11.44)
(Т*р+\)х
т
= 1цх
г
,
(П-45)
где
fc
3
—
коэффициент усиления,
как в
(10.10).
Для этой системы составим характеристическое уравнение
T
a
T
2
r
s* 4 (Г
2
+
Т
к
Т
а
)
s
2
+ (Т
и
+ Т
к
) s + 1 + = 0.
(11.46)
При всех положительных динамических константах
и
коэффи-
циентах усиления системы единственным критерием устойчивости
будет определитель Гурвица второго порядка
(6.3)
(П +
Т
К
Т
Ш
)
(Т
а
+ Т
к
) - (1 + Ш) Т
а
Т} >0
или
Т
к
(77 + П +
Т
К
Т
Ю
)
-
k^T^Tr
> 0.
(11.47)
Из
(11.47)
очевидно,
что при
устранении катаракта
(Т
к
= 0)
система становится неустойчивой. Значит,
как уже
указывалось,
свойства саморегулирования турбины
в
принципе
не
могут ком-
пенсировать вредное влияние масс регулятора.
Это
понятно
и фи-
зически:
для
устранения колебаний масс регулятора требуется
диссипация энергии.
Вышнеградский, хотя
и
пренебрегал свойством саморегули-
рования,
все же дал
диаграмму
(см. рис.
11.5),
пригодную
для
детального суждения
о
характере процесса регулирования
и для
структурных схем
с
апериодическими звеньями.
В
этом ценность
параметров Вышнеградского, выраженных через коэффициенты
характеристического уравнения.
Параметрами Вышнеградского согласно
(11.29)
будут
х
= (П +
т
ш
т
к
)/>/
пт*,(1+ш;
Y
= (Т
А
+
т
к
)/Кт
ш
г
а
(1
к
W
2
-
185
С увеличением времени катаракта
Т
я
оба
параметра растут,
и
под его
влиянием регулирование становится устойчивым.
При
этом можно достигнуть монотонного
и
даже апериодического про-
цесса регулирования.
Эта положительная роль катаракта
все же не
делает безвредной
массу, передвигаемую чувствительным элементом,
так как ка-
таракт снижает быстродействие системы регулирования.
ГЛАВА
12.
КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
В
гл.
8
было показано,
что
параллельные связи
в
прин-
ципе могут оказывать сильное
и
притом благоприятное влияние
на динамические характеристики системы регулирования. Было,
в частности, отмечено,
что
в
параллельные связи можно вводить
звенья, вносящие усиление, замедление
или
опережение переда-
ваемого сигнала.
Эти
важные возможности корректировать
с по-
мощью параллельных связей процесс регулирования
уже
с
дав-
них
пор
используются»
в
энергетических установках.
По
мере
ужесточения требований
к
динамическим показателям современных
систем регулирования
все
шире применяются корректирующие
устройства.
В
этой главе рассмотрим примеры параллельных
связей, часто применяемых
в
системах регулирования турбин.
§
12.1.
РЕГУЛИРОВАНИЕ
С
ДОПОЛНИТЕЛЬНЫМ
СИГНАЛОМ
ПО
ПРОИЗВОДНОЙ
Воздействие
на
систему
по
производной вырабатывается
вдифференцирующем звене
(см.
§
7.4). Его
осо-
бенность
—
передача сигнала
с
опережением
по
фазе.
Это
замеча-
тельное звено может качественно улучшать динамику быстро-
действующих систем регулирования. Принципиальные
его
воз-
можности лучше всего вскрываются методом исследования
ча-
стотных характеристик динамической системы
в
целом.
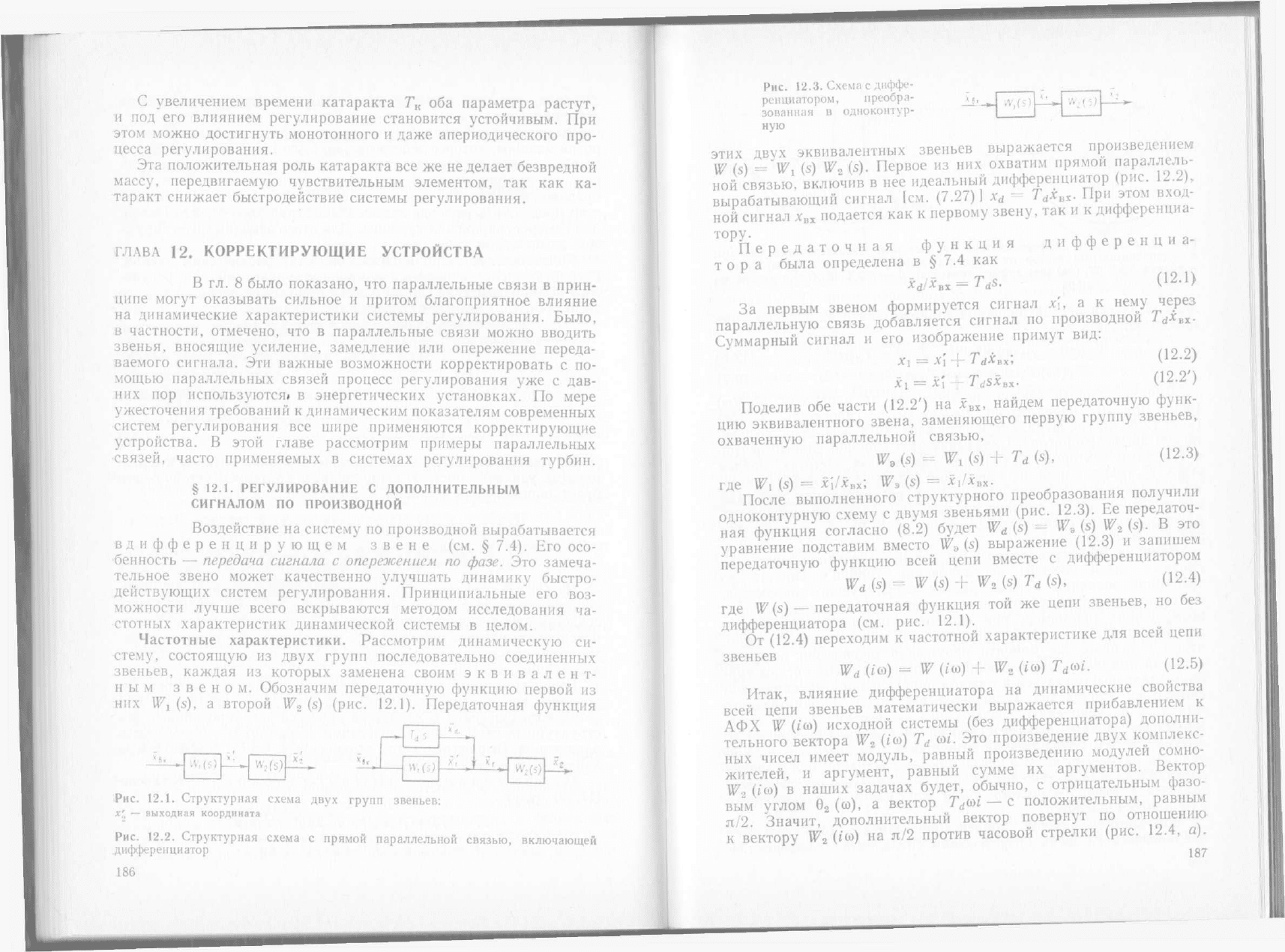
Частотные характеристики. Рассмотрим динамическую
си-
стему, состоящую
из
двух групп последовательно соединенных
звеньев, каждая
из
которых заменена своим эквивалент-
ным звеном. Обозначим передаточную функцию первой
из
них
W
l
(s), а
второй
W
2
(s) (рис. 12.1).
Передаточная функция
W,(S)
«•
w,(s)
W,(S)
w,(s)
Рис.
12.1.
Структурная схема двух групп звеньев:
Xi —
выходная координата
Рис.
12.2.
Структурная схема
с
прямой параллельной связью, включающей
дифференциатор
186
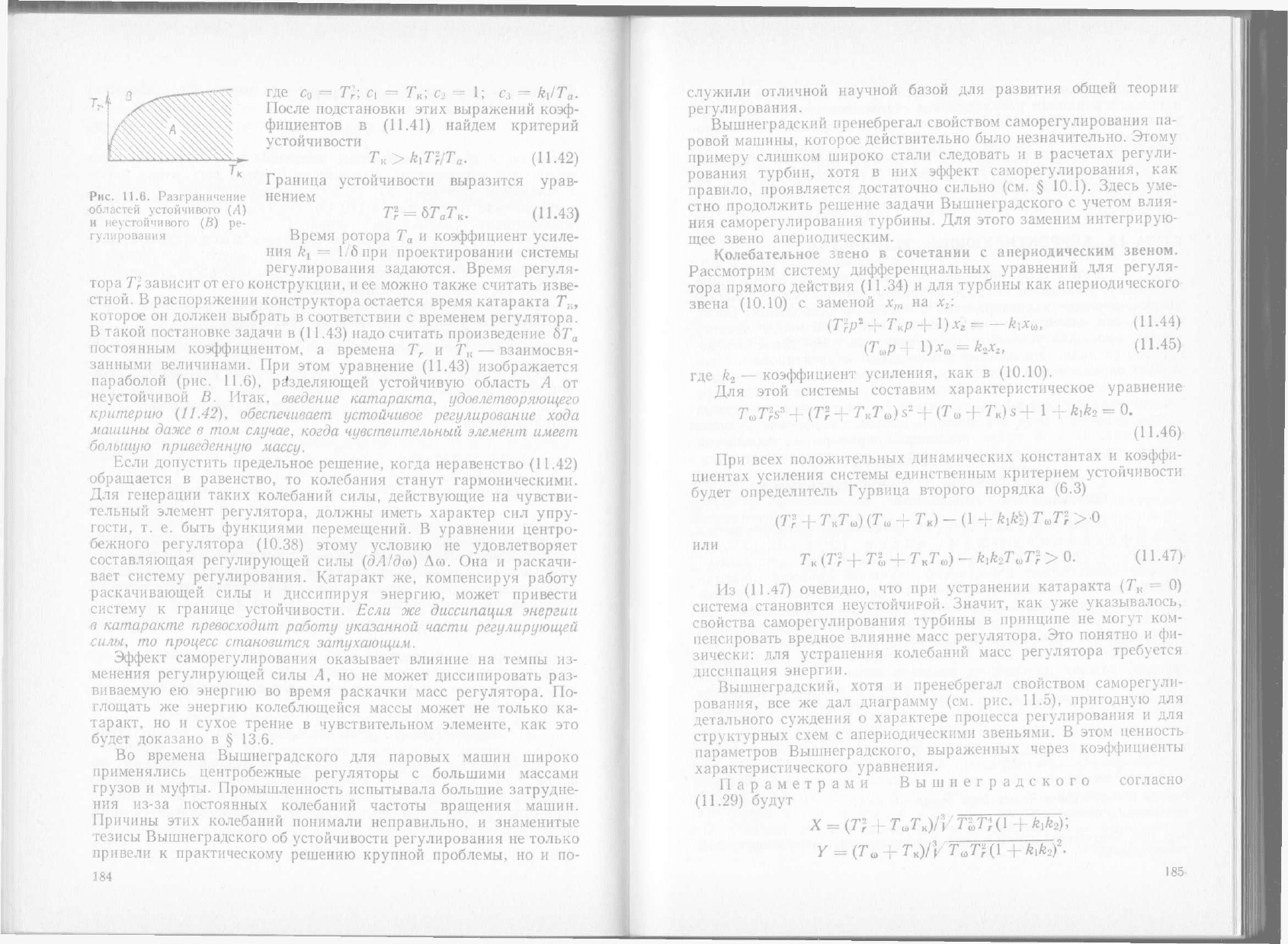
Рис.
12.3.
Схема
с
диффе-
ренциатором, иреобра-
;
FI
I "
|
j". J *
(
_
|
J
Г.
^
зоваиная
в
одноконтур-
*" ' >'
:
*" "•' ' *~
ную
этих двух эквивалентных звеньев выражается произведением
W
(s) = W
1
(s) W
2
(s).
Первое
из
них
охватим прямой параллель-
ной связью, включив
в
нее
идеальный дифференциатор
(рис. 12.2),
вырабатывающий сигнал
1см. (7.27)1
x
d
= T
d
x
vx
.
При
этом вход-
ной сигнал
х
вх
подается
как
к
первому звену,
так
и к
дифференциа-
тору.
Передаточная функция дифференциа-
тора была определена
в § 7.4 как
x
d
/x
BX
= T
d
s.
(12.1)
За первым звеном формируется сигнал
х\, а к
нему через
параллельную связь добавляется сигнал
по
производной
T
d
x
BX
.
Суммарный сигнал
и его
изображение примут
вид:
*i
= х\
-f
T
d
x
BX
;
(12.2)
Xl
= x\ + T
d
sx
BX
.
(12.2')
Поделив
обе
части
(12.2')
на
х
ъх
,
найдем передаточную функ-
цию эквивалентного звена, заменяющего первую группу звеньев,
охваченную параллельной связью,
W,(s)
= WAs) +
T
d
(s),
(12.3)
где
Wi (s) =
x\lx
BX
\
W
3
(s)
=
*i/x„.
После выполненного структурного преобразования получили
одноконтурную схему
с
двумя звеньями
(рис. 12.3).
Ее
передаточ-
ная функция согласно
(8.2)
будет
W
d
(s)
= W
a
(s)
W
2
(s).
В это
уравнение подставим вместо
W
a
(s)
выражение
(12.3)
и
запишем
передаточную функцию всей цепи вместе
с
дифференциатором
W
d
(s)
= W
(s)
+ W
2
(s)
T
d
(s), (12.4)
где
W(s) —
передаточная функция
той же
цепи звеньев,
но без
дифференциатора
(см. рис.
12.1).
От
(12.4)
переходим
к
частотной характеристике
для
всей цепи
звеньев
W
d
(to) = W (to) + W, (to) T
d
m.
(12.5)
Итак, влияние дифференциатора
на
динамические свойства
всей цепи звеньев математически выражается прибавлением
к
АФХ
W (to)
исходной системы
(без
дифференциатора) дополни-
тельного вектора
W
2
(ico)
T
d
u>i.
Это
произведение двух комплекс-
ных чисел имеет модуль, равный произведению модулей сомно-
жителей,
и
аргумент, равный сумме
их
аргументов. Вектор
W
2
(j'to)
в
наших задачах будет, обычно,
с
отрицательным фазо-
вым углом
9
2
(со),
а
вектор
T
d
u>i
—
с
положительным, равным
я/2.
Значит, дополнительный вектор повернут
по
отношению
к вектору
W
2
(to) на я/2
против часовой стрелки
(рис. 12.4,
а).
187
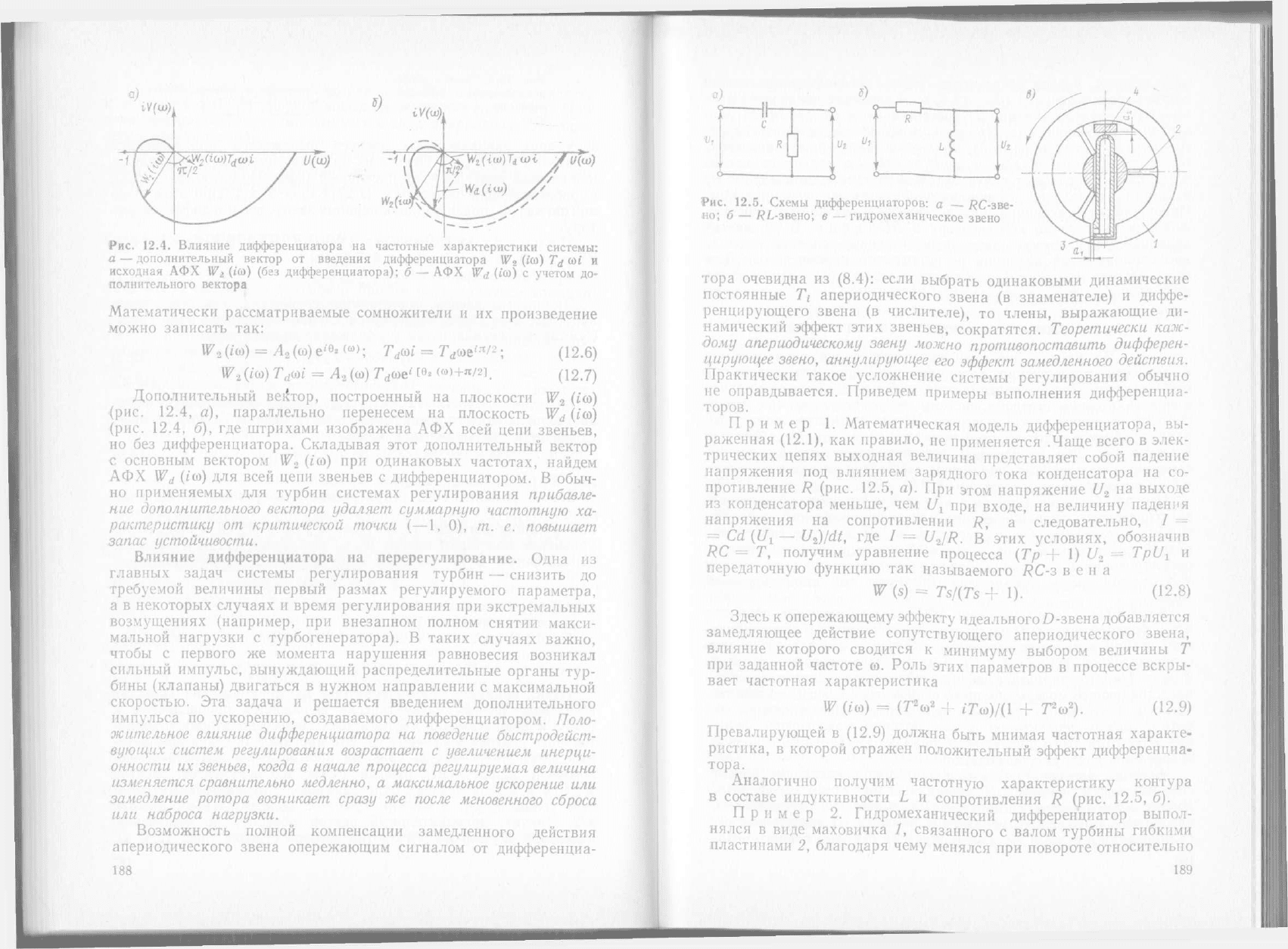
Рис.
12.4.
Влияние дифференциатора
на
частотные характеристики системы:
а
—
дополнительный вектор
от
введения дифференциатора
U7
2
T
d
wt
'
и
исходная
АФХ W
2
(ко) (без
дифференциатора);
б — АФХ W7
d
(ico)
с
учетом
до-
полнительного вектора
Математически рассматриваемые сомножители
и их
произведение
можно записать
так:
Wo{m) =
Л
2
(ю)е'
в
«
<
w
>; T
d
m =
Т
а
ш<^
2
;
(12.6)
Г
2
(ио)
r
d
o)f
= Л
2
(со) 7>>е<
^
<°»+я/2].
(12.7)
Дополнительный вектор, построенный
на
плоскости
W
2
(ico)
(рис.
12.4, а),
параллельно перенесем
на
плоскость
W
d
(гсо)
(рис.
12.4, б), где
штрихами изображена
АФХ
всей цепи звеньев,
но
без
дифференциатора. Складывая этот дополнительный вектор
с основным вектором
W
2
(tсо)
при
одинаковых частотах, найдем
АФХ
W
d
(гсо)
для
всей цепи звеньев
с
дифференциатором.
В
обыч-
но применяемых
для
турбин системах регулирования прибавле-
ние дополнительного вектора удаляет суммарную частотную
ха-
рактеристику
от
критической точки
(—1, 0), т. е.
повышает
запас устойчивости.
Влияние дифференциатора
на
перерегулирование. Одна
из
главных задач системы регулирования турбин
—
снизить
до
требуемой величины первый размах регулируемого параметра,
а
в
некоторых случаях
и
время регулирования
при
экстремальных
возмущениях (например,
при
внезапном полном снятии макси-
мальной нагрузки
с
турбогенератора).
В
таких случаях важно,
чтобы
с
первого
же
момента нарушения равновесия возникал
сильный импульс, вынуждающий распределительные органы тур-
бины (клапаны) двигаться
в
нужном направлении
с
максимальной
скоростью.
Эта
задача
и
решается введением дополнительного
импульса
по
ускорению, создаваемого дифференциатором. Поло-
жительное влияние дифференциатора
на
поведение быстродейст-
вующих систем регулирования возрастает
с
увеличением инерци-
онности
их
звеньев, когда
в
начале процесса регулируемая величина
изменяется сравнительно медленно,
а
максимальное ускорение
или
замедление ротора возникает сразу
же
после мгновенного сброса
или наброса нагрузки.
Возможность полной компенсации замедленного действия
апериодического звена опережающим сигналом
от
дифференциа-
188
тора очевидна
из
(8.4):
если выбрать одинаковыми динамические
постоянные
T
t
апериодического звена
(в
знаменателе)
и
диффе-
ренцирующего звена
(в
числителе),
то
члены, выражающие
ди-
намический эффект этих звеньев, сократятся. Теоретически каж-
дому апериодическому звену можно противопоставить дифферен-
цирующее звено, аннулирующее
его
эффект замедленного действия.
Практически такое усложнение системы регулирования обычно
не оправдывается. Приведем примеры выполнения дифференциа-
торов.
Пример
1.
Математическая модель дифференциатора,
вы-
раженная
(12.1),
как
правило,
не
применяется .Чаще всего
в
элек-
трических цепях выходная величина представляет собой падение
напряжения
под
влиянием зарядного тока конденсатора
на со-
противление
R
(рис.
12.5, а). При
этом напряжение
U
2
на
выходе
из конденсатора меньше,
чем U
x
при
входе,
на
величину падения
напряжения
на
сопротивлении
R, а
следовательно,
/ =
= Cd (U
x
— U
2
)/dt, где / = U
2
/R. В
этих условиях, обозначив
RC
= Т,
получим уравнение процесса
(Тр + 1) с7, = TpV
x
и
передаточную функцию
так
называемого
RC-з
вена
W(s) =
Ts/(Ts+
1).
(12.8)
Здесь
к
опережающему эффекту идеальногоD-звена добавляется
замедляющее действие сопутствующего апериодического звена,
влияние которого сводится
к
минимуму выбором величины
Т
при заданной частоте
со.
Роль этих параметров
в
процессе вскры-
вает частотная характеристика
W (ico)
=
(Г
2
со
2
+
tT
co)/(l
+
Т
2
со
2
).
(12.9)
Превалирующей
в
(12.9)
должна быть мнимая частотная характе-
ристика,
в
которой отражен положительный эффект дифференциа-
тора.
Аналогично получим частотную характеристику контура
в составе индуктивности
L и
сопротивления
R (рис. 12.5, б).
Пример
2.
Гидромеханический дифференциатор выпол-
нялся
в
виде маховичка
1,
связанного
с
валом турбины гибкими
пластинами
2,
благодаря чему менялся
при
повороте относительно
189
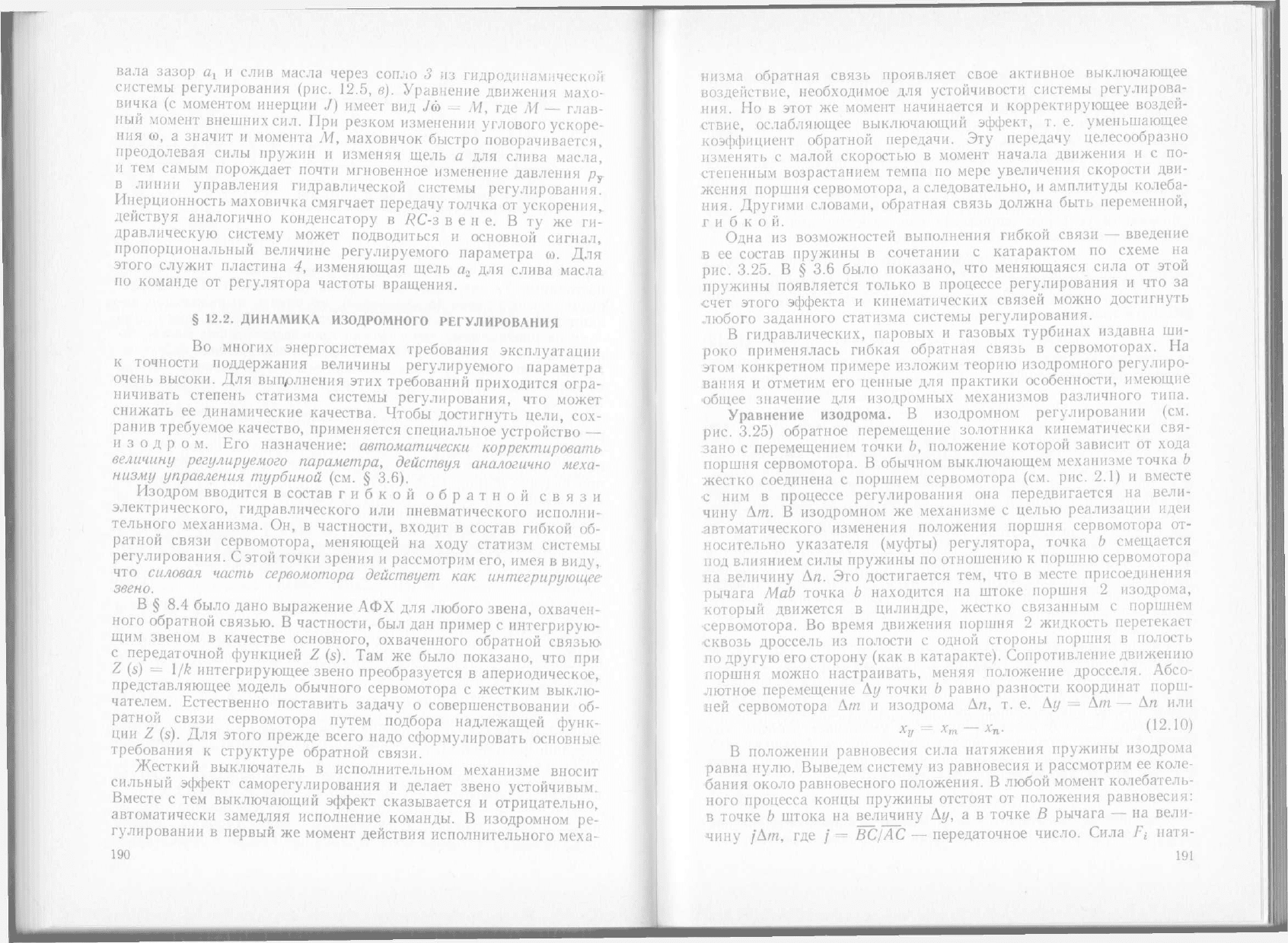
вала зазор а
х
и слив масла через сопло 3 из гидродинамической
системы регулирования (рис. 12.5, в). Уравнение движения махо-
вичка (с моментом инерции J) имеет вид ЛЬ = М, где М — глав-
ный момент внешних сил. При резком изменении углового ускоре-
ния со, а значит и момента М, маховичок быстро поворачивается,
преодолевая силы пружин и изменяя щель а для слива масла!
и тем самым порождает почти мгновенное изменение давления pi
в линии управления гидравлической системы регулирования.
Инерционность маховичка смягчает передачу толчка от ускорения,
действуя аналогично конденсатору в RC-з вене. В ту же ги-
дравлическую систему может подводиться и основной сигнал,
пропорциональный величине регулируемого параметра ш. Для
этого служит пластина 4, изменяющая щель а
2
для слива масла
по команде от регулятора частоты вращения.
§ 12.2. ДИНАМИКА ИЗОДРОМНОГО РЕГУЛИРОВАНИЯ
Во многих энергосистемах требования эксплуатации
к точности поддержания величины регулируемого параметра
очень высоки. Для выпрлнения этих требований приходится огра-
ничивать степень статизма системы регулирования, что может
снижать ее динамические качества. Чтобы достигнуть цели, сох-
ранив требуемое качество, применяется специальное устройство —
и з о д р о м. Его назначение: автоматически корректировать
величину регулируемого параметра, действуя аналогично меха-
низму управления турбиной (см. § 3.6).
Изодром вводится в состав гибкой обратной связи
электрического, гидравлического или пневматического исполни-
тельного механизма. Он, в частности, входит в состав гибкой об-
ратной связи сервомотора, меняющей на ходу статизм системы
регулирования. С этой точки зрения и рассмотрим его, имея в виду,
что силовая часть сервомотора действует как интегрирующее
звено.
В § 8.4 было дано выражение АФХ для любого звена, охвачен-
ного обратной связью. В частности, был дан пример с интегрирую-
щим звеном в качестве основного, охваченного обратной связью
с передаточной функцией Z (s). Там же было показано, что при
Z
(s) = l/k интегрирующее звено преобразуется в апериодическое,
представляющее модель обычного сервомотора с жестким выклю-
чателем. Естественно поставить задачу о совершенствовании об-
ратной связи сервомотора путем подбора надлежащей функ-
ции Z (s). Для этого прежде всего надо сформулировать основные
требования к структуре обратной связи.
Жесткий выключатель в исполнительном механизме вносит
сильный эффект саморегулирования и делает звено устойчивым.
Вместе с тем выключающий эффект сказывается и отрицательно,
автоматически замедляя исполнение команды. В изодромном ре-
гулировании в первый же момент действия исполнительного меха-
190
низма обратная связь проявляет свое активное выключающее
воздействие, необходимое для устойчивости системы регулирова-
ния. Но в этот же момент начинается и корректирующее воздей-
ствие, ослабляющее выключающий эффект, т. е. уменьшающее
коэффициент обратной передачи. Эту передачу целесообразно
изменять с малой скоростью в момент начала движения и с по-
степенным возрастанием темпа по мере увеличения скорости дви-
жения поршня сервомотора, а следовательно, и амплитуды колеба-
ния. Другими словами, обратная связь должна быть переменной,
гибкой.
Одна из возможностей выполнения гибкой связи — введение
в ее состав пружины в сочетании с катарактом по схеме на
рис.
3.25. В § 3.6 было показано, что меняющаяся сила от этой
пружины появляется только в процессе регулирования и что за
счет этого эффекта и кинематических связей можно достигнуть
любого заданного статизма системы регулирования.
В гидравлических, паровых и газовых турбинах издавна ши-
роко применялась гибкая обратная связь в сервомоторах. На
этом конкретном примере изложим теорию изодромного регулиро-
вания и отметим его ценные для практики особенности, имеющие
общее значение для изодромных механизмов различного типа.
Уравнение изодрома. В изодромном регулировании (см.
рис.
3.25) обратное перемещение золотника кинематически свя-
зано с перемещением точки Ь, положение которой зависит от хода
поршня сервомотора. В обычном выключающем механизме точка Ь
жестко соединена с поршнем сервомотора (см. рис. 2.1) и вместе
•с ним в процессе регулирования она передвигается па вели-
чину Am. В изодромном же механизме с целью реализации идеи
автоматического изменения положения поршня сервомотора от-
носительно указателя (муфты) регулятора, точка b смещается
под влиянием силы пружины по отношению к поршню сервомотора
на величину An. Это достигается тем, что в месте присоединения
рычага Mab точка b находится на штоке поршня 2 изодрома,
который движется в цилиндре, жестко связанным с поршнем
сервомотора. Во время движения поршня 2 жидкость перетекает
•сквозь дроссель из полости с одной стороны поршня в полость
по другую его сторону (как в катаракте). Сопротивление движению
поршня можно настраивать, меняя положение дросселя. Абсо-
лютное перемещение Ау точки b равно разности координат порш-
ней сервомотора Am и изодрома An, т. е. Ay = Am — An или
х
у
-=х
т
-х
п
.
(12.10)
В положении равновесия сила натяжения пружины изодрома
равна нулю. Выведем систему из равновесия и рассмотрим ее коле-
бания около равновесного положения. В любой момент колебатель-
ного процесса концы пружины отстоят от положения равновесия:
в точке b штока на величину Ау, а в точке В рычага — на вели-
чину /А/и, где / = ВС [АС — передаточное число. Сила F
t
натя-
191
жения пружины пропорциональна изменению
eej
длины
ВЬ,
а
это
значит, что/
7
;
= c
t
(Ay —
/А/л),
где
с*
—
жесткость пружины.'
Сопротивление движению поршня изодрома
во
время малых
ко
лебаний можно принять,
как в
катаракте, пропорциональным
его
скорости
п.
Обозначив коэффициент пропорциональности
/
ь
найдем действующую
на
поршень силу
F
t
= f
t
h,
равную,
но
про
тивоположно направленную силе натяжения пружины.
Влиянием
на
движение поршня изодрома связанных
с ним
масс
обычно можно пренебрегать,
а
тогда согласно двум последним
уравнениям условием равновесия
сил,
действующих
на
движу
щийся поршень, становится уравнение
Ct
(Ay — /Am) — f
t
n = 0. (12.11)
Продифференцировав
по
времени уравнение
(12.10) и
заметив,
что
d (Ay) = dy и т. д.,
можно записать
п = т— у и
представить
(12.11) в
таком виде:
c
i
(Ay~jAm)f
i
(thy) = 0. (12.12)
Перепишем уравнение изодрома
(12.12) в
относи
тельных величинах
,
T
t
x
u + x
v
Т,£
т
}х
т
= 0, (12.13)
где
T
t
=
fi/ci
—
постоянная
и з о д р о м а; х
у
=
Ау/т
тах
;
х
т
=
Ат/т
тах
; т
тг1Х
—
рабочий
ход
поршня сервомотора.
В изодромиом регулировании точка
Ъ
совершает максимальный
ход между крайними положениями равновесия, равный /т
тах
,
в
то
время
как
регулируемая величина изменяется
от
минимума
до максимума, например угловая скорость
— от
co
mln
до
(о
шах
.
Если
бы та же
система регулирования
и при том же
регуляторе
имела жесткий выключатель,
т. е.
поршень изодрома
был бы за
креплен
в
своем цилиндре
и
рычаг
АС —
удален,
то
точка
Ъ
вместе
с
поршнем сервомотора перемещалась
бы
между крайними
положениями равновесия
на
величину т
шах
.
При
этом коэффи
циент неравномерности регулирования стал
бы
равным
6
0
, и уг
ловая скорость изменялась
бы в
других пределах,
чем при
нали
чии изодрома.
Связь между коэффициентами неравномерности регулирова
ния
б с
изодромом
и 6
0
с
жестким выключателем найдем, заметив,
что рабочий
ход
указателя регулятора изменяется пропорцио
нально рабочему ходу точки
Ъ. Ход же
точки
Ъ в
случае жесткого
выключателя,
как
сказано, равен т
тах
,
и ему
соответствует
ход
регулятора г
тах
.
А
введение изодрома уменьшает рабочий
ход
точки
Ь
пропорционально передаточному числу
/
рычага
АС.
Следовательно, изодром меняет рабочий
ход
указателя регулятора
в
/ раз, что
можно выразить уравнением
б
= /б
0
. (12.14)
Изменяя передаточное число
/,
можно
в
широком диапазоне
менять коэффициент неравномерности изодромного регулирова
192
ния
6. При / = 0
становится
6 = 0 —
чисто изодромное
регулирование. Если
же
заменить рычаг второго рода
АС
рычагом первого рода перестановкой точки
В по
другую сторону
опоры
С, то
получим
/ < 0 и
коэффициент неравномерности такой
системы регулирования станет отрицательным. Впрочем, послед
нее свойство изодромного регулирования
не
имеет
в
турбострое
нии практического значения.
Уравнение золотника.
Для
изодромного регулирования откры
тие окон золотника
(с
учетом главной обратной связи)
sаАг
— ЬАу, (12.15)
где
a
=~ab/b~M;
b =
аМ/ЬМ
(см. рис. 3.25).
Поделив
обе
части
(12.15) на
Ьт
тах
, запишем
его в
относитель
ных величинах
x
s
= —x
z
— х
у
, или, с
учетом
(12.8),
x
s
= — х
г
— х
т
+ х
п
, (12.16)
где
x
s
=
s/bm
mm
;
x
z
=
Az/(b/a)
m
max
;
x
y
=
A#/m
raax
.
Здесь
ко
ордината
x
y
—
относительное перемещение точки
b —
играет роль
выходного сигнала
из
звена, изображающего изодромный меха
низм
как
обратную связь.
В этих уравнениях
не
введено прежнего понятия
о
максималь
ных ходах золотника
(s
max
)
и
чувствительного элемента
(г
гаах
),
так
как они
теряют смысл
для
чисто изодромного регулирования
при
6 = 0.
Если
же
условно обозначить
bm
max
=
s
max
и
(b/а) т
тах
=
(аМ/аЬ) т
гаах
=
г
отах
,
то эти
величины будут иметь
смысл максимальных ходов
в
воображаемой схеме регулирования,
в которой поршень изодрома закреплен
в
своем цилиндре,
а это
равносильно введению жесткого выключателя.
Уравнение сервомотора. Рассматривая изодром
как
динамиче
ское звено, включенное
в
отрицательную обратную связь,
сам
сервомотор следует представить интегрирующим звеном,
как это
принималось
и в § 8.4. В
этом случае уравнением сревомотора
будет
T
s
x
m
= x
s
. (12.17)
Для исследования замкнутой системы изодромного регулиро
вания следует
еще
добавить
два
уравнения: чувствительного эле
мента
и
объекта регулирования.
Уравнение чувствительного элемента. Воспользуемся уравне
нием
(10.50) для
идеального регулятора
(без
учета масс
и
трения)
х
г
=
xJ8
0
.
(12.18)
Уравнение объекта регулирования.
Для
упрощения выкладок
рассмотрим движение ротора турбины
или
процесс
в
емкости
со
слабыми свойствами саморегулирования,
т. е.
представим объект
регулирования интегрирующим звеном
(см.,
например,
(10.13))
T
aXia
= x
m
. (12.19)
7
Кириллов
И. И
193
Устойчивость изодромного регулирования. Изучается система
трех линейных дифференциальных уравнений
(12.13), (12.17)
и
(12.19)
совместно
с
алгебраическими уравнениями
(12.16)
и
(12.18).
Преобразуем
ее к
такому виду:
ТiXy
-\- х
у
Т\х
т
jx
m
= 0;
T
s
x
m
+ x
u
+ xjd
0
= 0;
(12.20)
ТаХю
Х
т
= 0.
Характеристическое уравнение системы линейных дифферен-
циальных уравнений
(12.20)
запишем
как
определитель третьего
порядка
Т,$
+
1
-7> - /
1 T
s
s
0
—1
или
в
развернутом виде
7<7
sS
3
+ (T
s
+ T
t
) s
2
+
[Ti/(8
0
T
a
)
+ /] s +
1/(б
0
7
а
)
= 0.
(12.21)
Критериями устойчивости
(6.2) при / > 0
ста-
нут:
WJ
+ />0;
(12.22)
/(7
s
+ 7,) +
7?/(6
0
7
a
)>0. (12.23)
Оба критерия выполняются
для
любых коэффициентов неравно-
мерности изодромного регулирования
б > 0. Для
чисто изодром-
ного регулирования
/ = 0, а
тогда остается единственный кри-
терий, положительный
при
всех
б
0
> 0.
Ttlib
Q
T
a
)
> 0.
(12.24)
Даже если допустить отрицательный коэффициент неравномер-
ности
б, что
возможно согласно
(12.14)
при / < 0
(рычаг первого
рода
на
рис. 3.25),
то и в
таком случае
при
определенных условиях
может быть достигнута устойчивость системы регулирования.
Это подтверждает качественное изменение динамических характе-
ристик
от
введения изодрома.
Та же
система регулирования,
но
при жестком выключателе была устойчива только
при б > 0
(см.
§
11.1).
Влияние динамических констант
на
качество процесса изодром-
ного регулирования можно оценить
с
помощью диаграммы Вышне-
градского (рис.
11.5). Для
этого надо вычислить параметры Вышне-
градского
(11.29)
применительно
к
характеристическому уравне-
нию
(12.21):
X
= (T. + T
t
) V6
0
Tj(T.T
t
r;
(12.25)
Y
-
[7,/(6
0
7
e
)
I /]
VWafWTTb-
(12.26)
194
0
1/б
0
T
a
s
=
0
2(s)
п
1ЯТЛ)
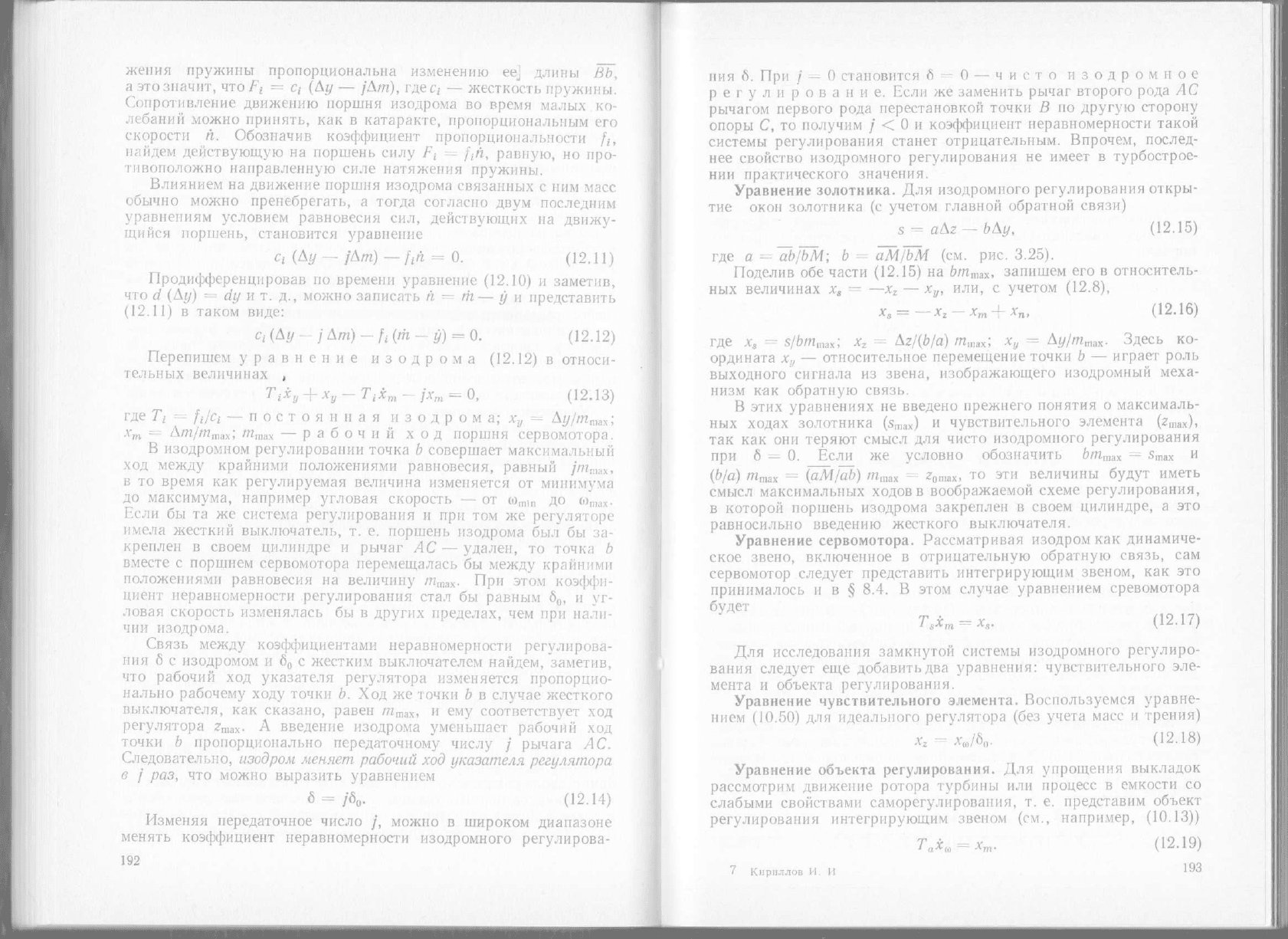
Рис. 12.6.
Структурная схема
изодромного
регулирования
Частотная характеристика.
Изо-
дром представляет собой гибкую
отрицательную обрат-
ную связь, охватывающую
ин-
тегрирующее звено (рис.
12.6). В
звене
обратной связи выходная координата
из интегрирующего звена
х
т
преоб-
разуется
в
координату
х
у
,
передаваемую
с
отрицательным знаком
к входу
в
основное звено. Передаточная функция изодрома
как
эквивалентного звена равна
Z(s) =
x„/x
m
.
(12.27)
Это отношение координат выразим через динамические постоян-
ные
и
коэффициенты усиления, пользуясь уравнением
(12.13)
в изображениях,
Z
(s) = (7,8 + i)/(T
iS
+ 1),
(12.28)
а
из
(12.28)
подстановкой
s = /со
получим частотную характери-
стику изодрома
Z (ш) = (7, ш +
/)/(7,
ш + 1).
(12.29)
Отрицательный знак обратной связи отмечен
на рис. 12.6
дополнительным звеном
с
передаточным числом
—1.
В
результате
этого преобразования сигнала координата
х
у
алгебраически скла-
дывается
с
входной величиной
х
г
,
выражающей изменение регули-
руемого параметра
х
а
.
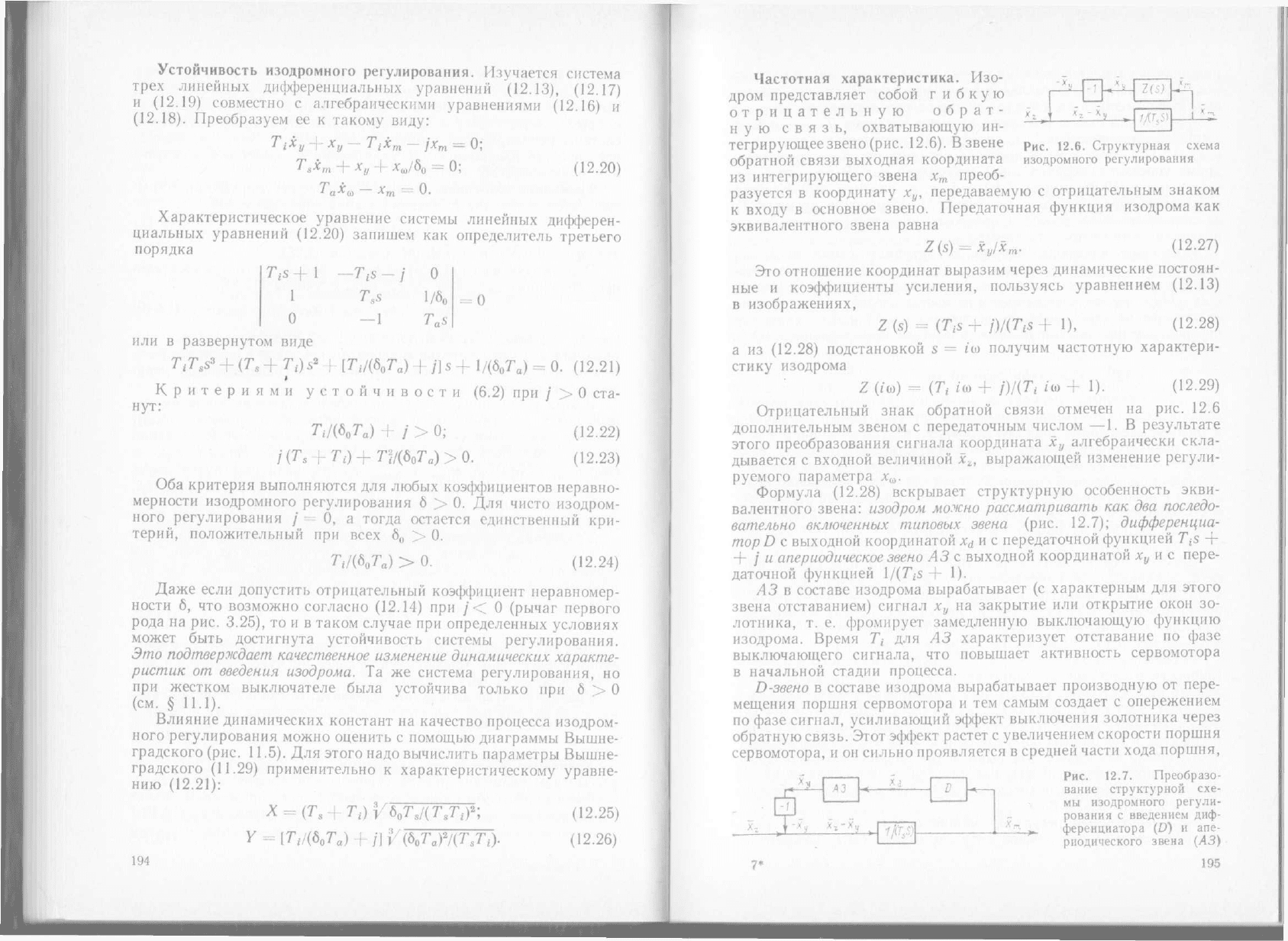
Формула
(12.28)
вскрывает структурную особенность экви-
валентного звена: изодром можно рассматривать
как два
последо-
вательно включенных типовых звена
(рис.
12.7);
дифференциа-
тор
D с
выходной координатой
х
й
и с
передаточной функцией
T
t
s +
+
j и
апериодическое звено
A3 с
выходной координатой
х
у
и с
пере-
даточной функцией
l/(7,-s
+ 1).
A3
в
составе изодрома вырабатывает
(с
характерным
для
этого
звена отставанием) сигнал
х
у
на
закрытие
или
открытие окон
зо-
лотника,
т. е.
фромирует замедленную выключающую функцию
изодрома. Время
T
t
для A3
характеризует отставание
по
фазе
выключающего сигнала,
что
повышает активность сервомотора
в начальной стадии процесса.
D-звено
в
составе изодрома вырабатывает производную
от
пере-
мещения поршня сервомотора
и тем
самым создает
с
опережением
по фазе сигнал, усиливающий эффект выключения золотника через
обратную связь. Этот эффект растет
с
увеличением скорости поршня
сервомотора,
и он
сильно проявляется
в
средней части хода поршня,
A3
X.i
д
J1
A3
д
Рис. 12.7.
Преобразо-
вание
структурной
схе-
мы
изодромного регули-
рования
с
введением
диф-
ференциатора
(D) и
апе-
риодического
звена
(A3)
195
повышая декремент колебания
и тем
самым снижая время регули-
рования. Выбирая оптимальное время изодрома
T
t
,
можно весьма
эффективно влиять
на
качество процесса регулирования.
Физический смысл большого времени изодрома
T
t
—
высокое
сопротивление дросселя
Д по
сравнению
с
жесткостью пружины
c
t
(см.
(12.13)); при
этом
в
процессе регулирования поршень изо-
дрома успевает совершить лишь небольшой
ход. В
пределе
T
t
-*•оо,
и из (12.28)
имеем
Z(s)-*-l,
т.е.
изодром вырождается
в жесткую обратную связь
от
точки
Ь.
Изменение времени
Т
1
за счет положения дросселя просто выполняется даже
на
ходу,
позволяя оптимизировать процесс.
Поскольку проеобразованная структурная схема изодрома
представлена двумя простыми звеньями
A3 и ДЗ,
становится оче-
видным многообразие схем
(в
частности электрических), выражаю-
щих одну
и ту же
математическую модель изодрома. Применение
электрических схем изодрома, состоящих
из A3 и ДЗ,
открывает
перспективу широкого использования этого замечательного меха-
низма.
§
12.3.
РЕГУЛЯТОР
МОЩНОСТИ
Обычный регулятор начинает активно действовать
только после существенного изменения регулируемого параметра,
и
он с
промедлением передает команду, ведущую машину
к но-
вому равновесному режиму работы. Естественно возникает идея
вводить
в
систему регулирования внешнее возмущение
как
дополни-
тельный командующий сигнал. Этот сигнал почти мгновенно пере-
дается
к
исполнительному механизму, когда изменение регулируе-
мого параметра
еще
едва зарождается. Такое опережающее воз-
действие
на
систему вносит принципиальное
и при том
положи-
тельное изменение
ее
динамических показателей.
Вместе
с тем
внешнее воздействие вызывает переходный про-
цесс,
а
значит,
— и
изменение регулируемого параметра. Вели-
чина
же
этого параметра
в
конце процесса остается совершенно
неопределенной, если
ее не
регулировать.
Вот
почему воздействие
на систему
по
нагрузке следует рассматривать
как
дополнительное
к обычному регулированию
по
величине параметра.
Особенно ценно введение опережающего сигнала
по
отклонению
мощности
в
системах регулирования турбин, работающих парал-
лельно
на
электрическую сеть
при
резких, временами, сбросах
и
набросах нагрузки.
В
таких случаях регулирование мощности
повышает быстродействие, необходимое
для
надежной работы энер-
госистемы
в
аварийных ситуациях
(см. § 20.2).
Регулятор мощ-
ности необходим также
для
выполнения задания
по
распределе-
нию мощности между агрегатами
или для
поддержания
ее на оп-
ределенном уровне
на
некоторых электростанциях
или на
отдель-
ных агрегатах
(см. § 3.4).
Безынерционный регулятор мощности. Допустим,
что
регу-
лятор настолько совершенен,
что он
может быть представлен
196
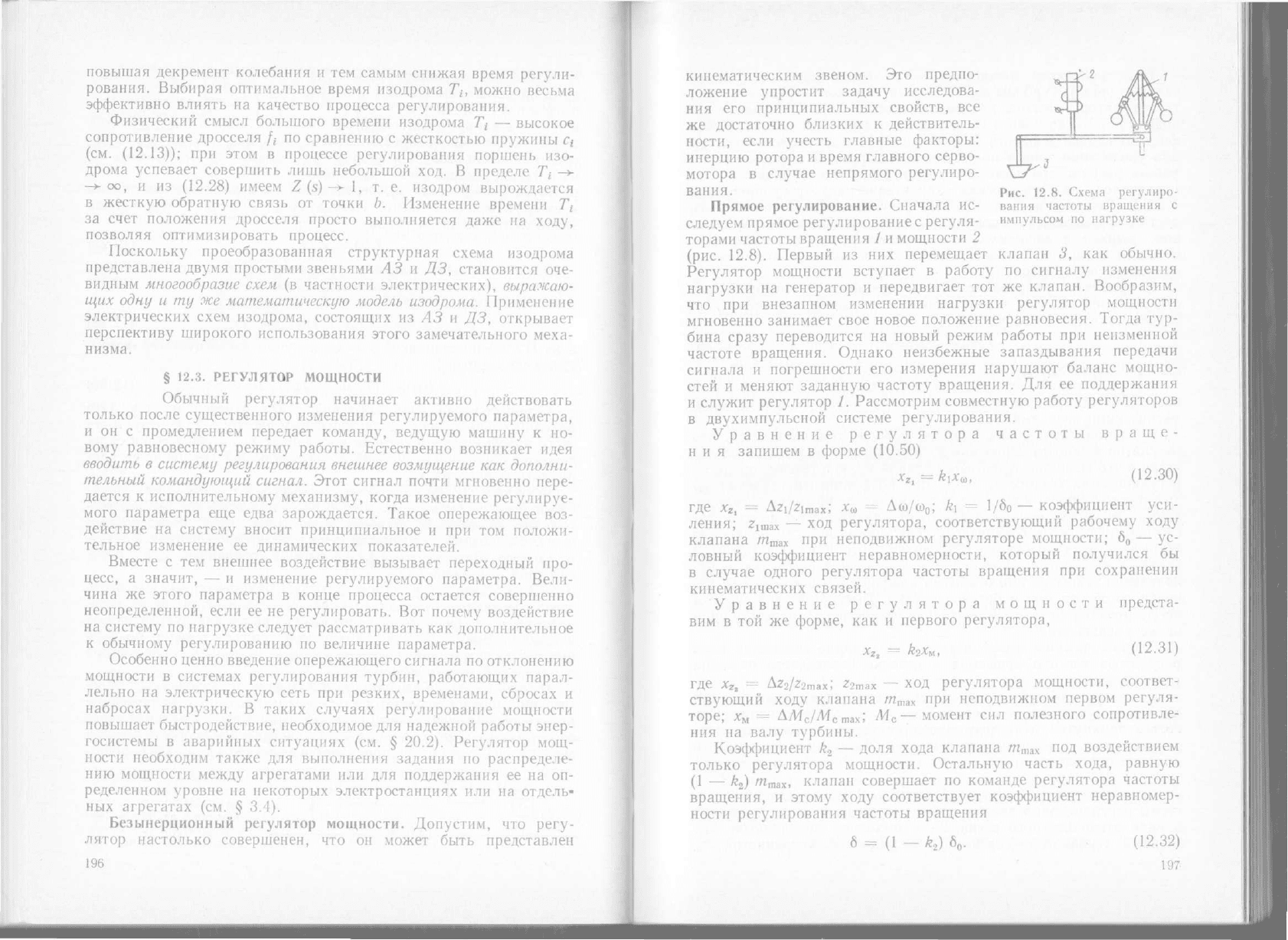
кинематическим звеном.
Это
предпо-
ложение упростит задачу исследова-
ния
его
принципиальных свойств,
все
же достаточно близких
к
действитель-
ности, если учесть главные факторы:
инерцию ротора
и
время главного серво-
мотора
в
случае непрямого регулиро-
вания.
Прямое регулирование. Сначала
ис-
следуем прямое регулирование
с
регуля-
торами частоты вращения
/ и
мощности
2
(рис.
12.8).
Первый
из них
перемещает
Регулятор мощности вступает
в
работу
нагрузки
на
генератор
и
Рис.
12.8.
Схема
регулиро-
вания частоты
вращения
с
импульсом
по
нагрузке
клапан
3, как
обычно,
по сигналу изменения
передвигает
тот же
клапан. Вообразим,
что
при
внезапном изменении нагрузки регулятор мощности
мгновенно занимает свое новое положение равновесия. Тогда тур-
бина сразу переводится
на
новый режим работы
при
неизменной
частоте вращения. Однако неизбежные запаздывания передачи
сигнала
и
погрешности
его
измерения нарушают баланс мощно-
стей
и
меняют заданную частоту вращения.
Для ее
поддержания
и служит регулятор
/.
Рассмотрим совместную работу регуляторов
в двухимпульсной системе регулирования.
Уравнение регулятора частоты враще-
ния запишем
в
форме
(10.50)
Xz. —
k\X(j),
(12.30)
где
x
Zl
=
Azi/zi
max
;
х
а
=
Ato/to
0
;
k
x
= 1/б
0
—
коэффициент уси-
ления; z
lmax
— ход
регулятора, соответствующий рабочему ходу
клапана
/п
тах
при
неподвижном регуляторе мощности;
б
0
— ус-
ловный коэффициент неравномерности, который получился
бы
в случае одного регулятора частоты вращения
при
сохранении
кинематических связей.
Уравнение регулятора мощности предста-
вим
в той же
форме,
как и
первого регулятора,
(12.31)
где
x
Zl
=
Az
2
/z
2
ma
X
;
z
2m
a
X
— ход
регулятора мощности, соответ-
ствующий ходу клапана m
max
при
неподвижном первом регуля-
торе;
х
м
=
AMJM
C
max!
М
с
—момент
сил
полезного сопротивле-
ния
на
валу турбины.
Коэффициент
k
2
—
доля хода клапана т
шах
под
воздействием
только регулятора мощности. Остальную часть хода, равную
(1 — k
2
)
m
max
, клапан совершает
по
команде регулятора частоты
вращения,
и
этому ходу соответствует коэффициент неравномер-
ности регулирования частоты вращения
6 = (1 - k
2
) б,
(12.32)
197
Если регулятор мощности быстро перемещает распредели-
тельные органы турбины
до
положения, близкого
к
равновесному,
то регулятору частоты вращения остается лишь небольшая
до-
водка системы
до
нового установившегося режима работы. Коэф-
фициент неравномерности
б
0
можно выбирать достаточно большим
для увеличения запаса
по
устойчивости,
так как при
совместной
работе регуляторов частоты
и
мощности этот коэффициент мало
отражается
на
статических характеристиках регулирования.
Коэффициент
же
неравномерности регулирования
б
может быть
достаточно малым
(в
принципе
—
даже нулевым). Таким обра-
зом, регулятор мощности, действуя совместно
с
регулятором
частоты вращения, создает условия
для
значительного снижения
статизма регулирования.
Непрямое регулирование. Пусть идеальный регулятор мощно-
сти передает команду через главный сервомотор, уравнение
ко-
торого запишем
в
форме
(10.61)
Т$х
т
-f- х
т
= х
г
, (12.33)
ГДе
Х
г
— X
Zl
~т~ Xz
2
', X
Zy
=
k\Xa',
Xzj
=
kiXu-
Промежуточные сервомоторы
или
усилители будем считать
настолько быстродействующими,
что их
можно заменить кине-
матическими звеньями.
В данном случае,
как и
выше, условно предполагается,
что
регулятор мощности мгновенно достигает нового положения равно-
весия
и что
величина
х
г%
остается равной нулю
в
течение процесса
регулирования мощности. Тогда
при
коэффициенте усиления
k
2
,
достаточно близком
к
единице,
в
самом начале процесса регулиро-
вания регулятор мощности проходит значительную долю пути,
соответствующего рабочему ходу сервомотора m
max
,
и
полностью
открывает окна золотника.
Это
значит,
что с
начала процесса
главный сервомотор двигается
с
максимальной скоростью
в на-
правлении закрытия
или
открытия клапанов
в
зависимости
от на-
чального сброса
или
наброса нагрузки. Быстродействие системы
регулирования
от
этого значительно возрастает,
а
перерегулиро-
вание уменьшается.
С приближением коэффициента
k
2
к
единице снижается роль
регулятора частоты вращения
в
доводке переходного процесса
регулирования.
Рассмотрим общий случай, когда
в
цепи регулятора мощности
включены инерционные звенья.
Так же не
будем ограничивать
состав замкнутой цепи регулирования частоты вращения, опе-
рируя лишь
с ее
передаточной функцией. Поставим цель: выделить
влияние регулятора мощности
на
качество процесса регулирова-
ния.
Преобразование структурной схемы.
В
состав основной
си-
стемы регулирования введем любой регулятор частоты вращения
в виде эквивалентного звена
W[ с
выходной координатой
x
Zl
,
главный сервомотор
—
звено
W
3
с
выходной координатой
х
т
198
W,
'2,
w,
IV,
w,
X,.
IV,
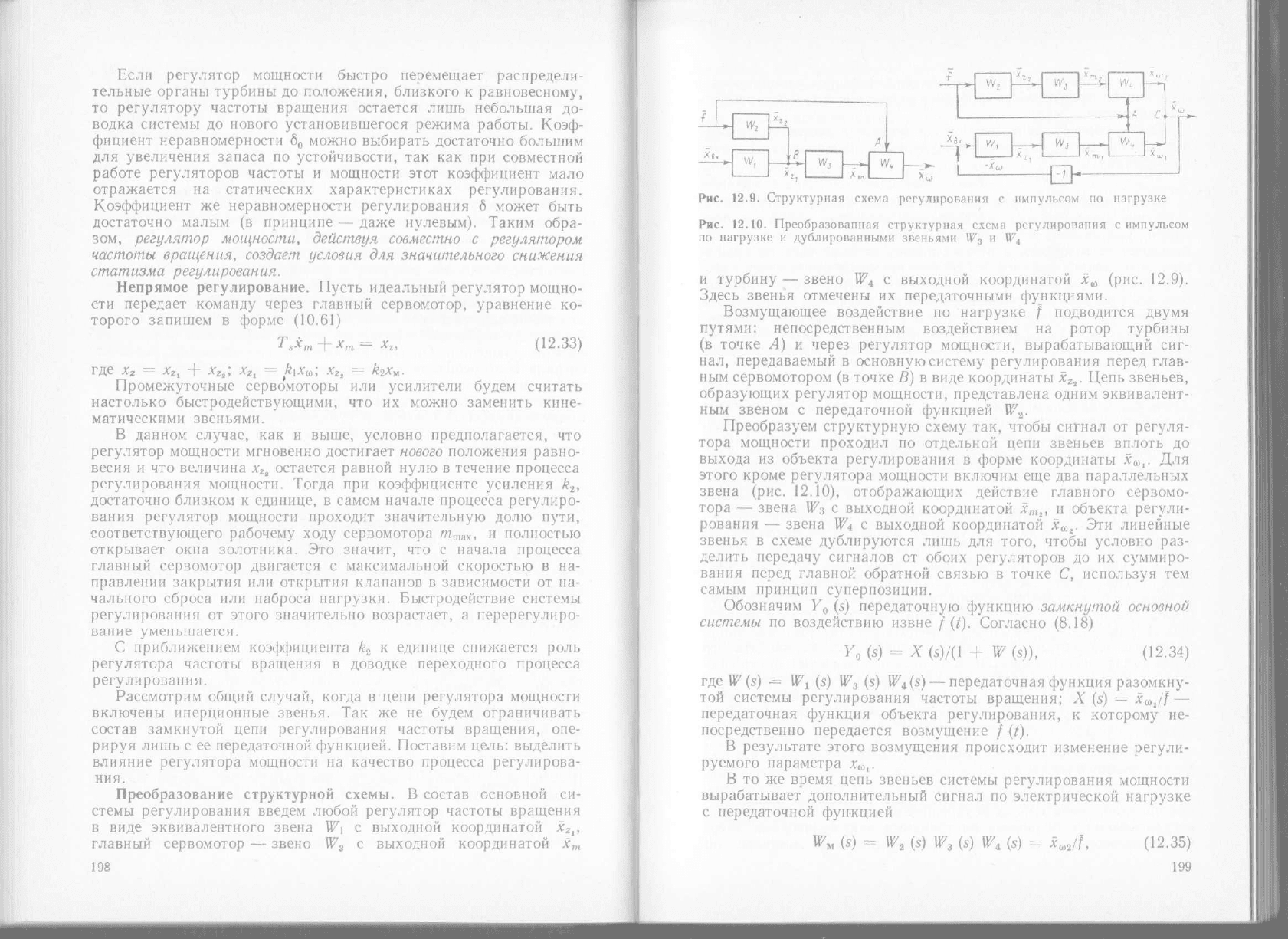
Рис. 12.9.
Структурная схема регулирования
с
импульсом
по
нагрузке
Рис.
12.10.
Преобразованная структурная схема регулирования
с
импульсом
по нагрузке
и
дублированными звеньями
W
3
и W
4
и турбину
—
звено
W
4
с
выходной координатой
х
а
(рис. 12.9).
Здесь звенья отмечены
их
передаточными функциями.
Возмущающее воздействие
по
нагрузке
f
подводится двумя
путями: непосредственным воздействием
на
ротор турбины
(в точке
А) и
через регулятор мощности, вырабатывающий сиг-
нал, передаваемый
в
основную систему регулирования перед глав-
ным сервомотором
(в
точке
В) в
виде координаты
х
2г
.
Цепь звеньев,
образующих регулятор мощности, представлена одним эквивалент-
ным звеном
с
передаточной функцией
W
2
.
Преобразуем структурную схему
так,
чтобы сигнал
от
регуля-
тора мощности проходил
по
отдельной цепи звеньев вплоть
до
выхода
из
объекта регулирования
в
форме координаты
x
ai
. Для
этого кроме регулятора мощности включим
еще два
параллельных
звена
(рис. 12.10),
отображающих действие главного сервомо-
тора
—
звена
W$ с
выходной координатой
х
тг
, и
объекта регули-
рования
—
звена
Wi с
выходной координатой
х
а2
. Эти
линейные
звенья
в
схеме дублируются лишь
для
того, чтобы условно раз-
делить передачу сигналов
от
обоих регуляторов
до их
суммиро-
вания перед главной обратной связью
в
точке
С,
используя
тем
самым принцип суперпозиции.
Обозначим
Y
0
(s)
передаточную функцию замкнутой основной
системы
по
воздействию извне
f (t).
Согласно
(8.18)
Y
0
(s) = X (s)/(l + W (s)), (12.34)
где
W (s) -= W
l
(s) W
s
(s)
W
4
(s)—
передаточная функция разомкну-
той системы регулирования частоты вращения;
X (s) = x
a
Jf —
передаточная функция объекта регулирования,
к
которому
не-
посредственно передается возмущение
/ (t).
В результате этого возмущения происходит изменение регули-
руемого параметра
х
е>1
.
В
то же
время цепь звеньев системы регулирования мощности
вырабатывает дополнительный сигнал
по
электрической нагрузке
с передаточной функцией
W
M
(s) = W
2
(s) W
3
(s) Wi (s) = Wf, (12.35)
199