Кириллов И.И. Автоматическое регулирование паровых турбин и газотурбинных установок
Подождите немного. Документ загружается.

Определенные интегралы
в
(13.12)
и
(13.13),
вообще говоря,
представляют собой функции
от а и со.
Сначала
же
рассмотрим
нелинейности нечетные
и
однозначные
(нет
петли),^
как,
например,
они
показаны
на рис. 13.4, а и б. Для
нелинейностей такого типа площади между кривой процесса
х
н
(/)
и осью
/ на
протяжении периода равны нулю. Вместе
с тем
выра-
жение
под
интегралом
в
(13.13)
можно преобразовать
к
виду
F
(a sin to/) cos
co/d (со/)
= (I/a) F (a sin
со/)
d (a sin cot)
или,
с
учетом
(13.7),
записать
его в
форме
F
(a sin
со/)
cos
со/ci
(со/)
=
ar
l
F
(х) dx.
(13.14)
Интеграл произведения
(13.14)
для
симметричных однозначных
колебаний равен нулю.
А это
значит,
что для
таких колебаний
и заданного вида
F (х)
коэффициент Фурье
А
2
(а)
= 0.
(13.15)
Сдвиг фазы первой гармоники выходной величины
х
н
по
сравне-
нию
с
фазой входной координаты
х
определяется,
как при вы-
воде
(5.38),
по
формуле
0
(а) -
arctg
[A
t
{a)IA
1
(а)}.
(13.16)
Из
(13.16)
следует,
что при
соблюдении условия
(13.15)
нет
сдвига фазы. Другими словами, первая гармоника нелинейности
отличается
от
входных колебаний
(13.7)
только амплитудой
х
я
= А\ sin со/.
(13.17)
Коэффициент гармонического усиле-
ния^ получим
из
сравнения
(13.7)
н
(13.17):
q = AJa;
(13.18)
х
я
= qx.
(13.19)
Таким образом, гармоническая линеаризация состоит
в том,
что заданная нелинейная функция заменяется эквивалентной
ли-
нейной
F
(А)
= qx.
(13.20)
Законность такой замены будет обоснована
в § 13.5.
Здесь
же
заметим,
что
главное условие
для
получения результата, близ-
кого
к
действительности,
уже
было сформулировано
в
первом
абзаце этого параграфа.
Пример. Рассмотрим нелинейность типа
реле
(рис.
13.11)
с
амплитудой симметричных колебаний
за
звеном
а
р
и
синусоидальными колебаниями перед
ним.
Вычислим
гармонический коэффициент усиления согласно
(13.12)
и
(13.18)
2Я
q =
(па)-
1
[ F
(a sin
со/)
sin
со/
d
(со/).
(13.21)
б
220
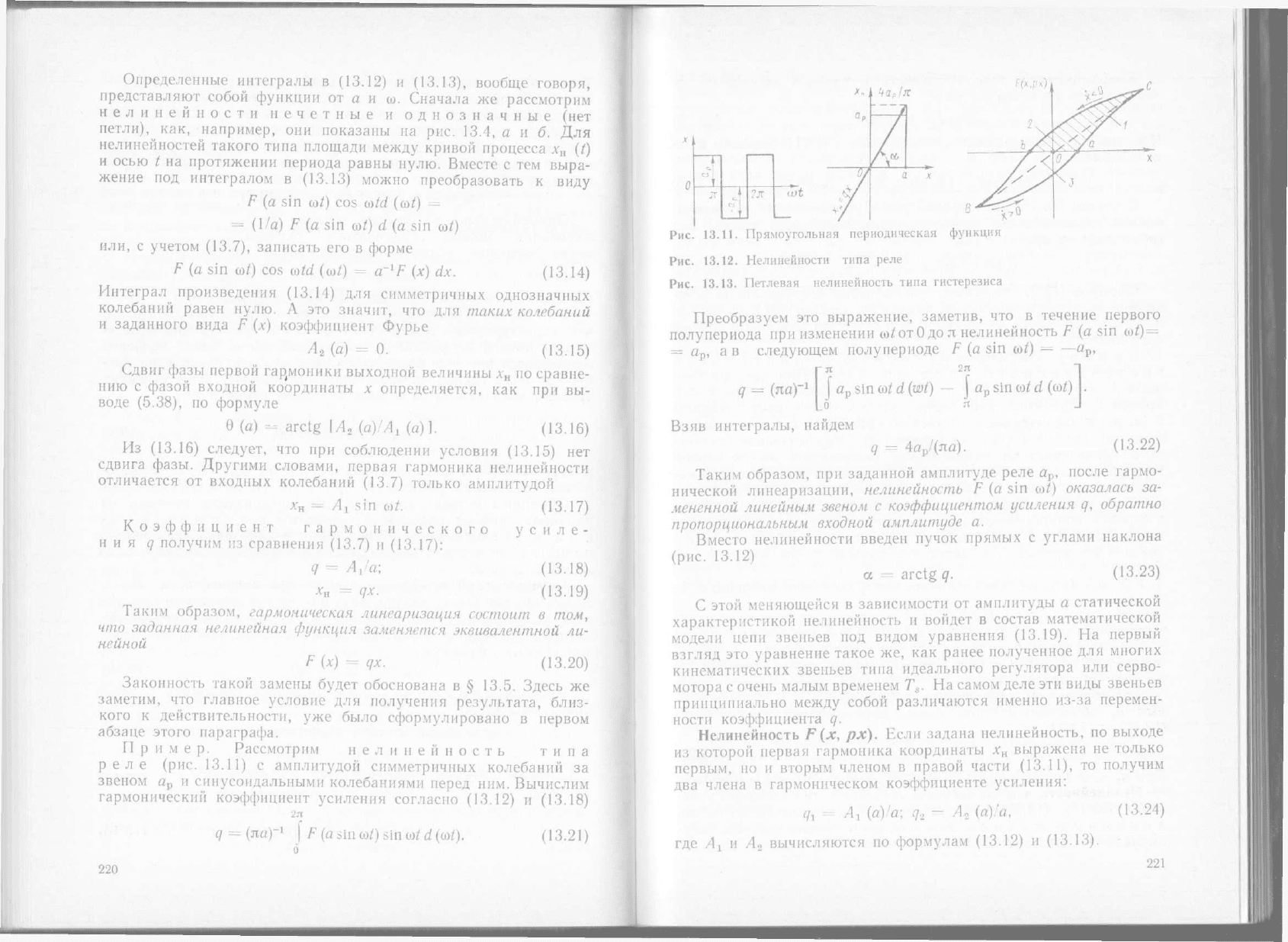
Рис.
13.11.
Прямоугольная периодическая функция
Рис.
13.12.
Нелинейности типа реле
Рис.
13.13.
Петлевая нелинейность типа гистерезиса
Преобразуем
это
выражение, заметив,
что в
течение первого
полупериода
при
изменении со/от
0
до
л
нелинейность
F (a sin со/)=
=
а
р
, а в
следующем полупериоде
F (a sin со/) = —а
q = (па)
1
J
а
р
sin
со/
d
(wt)
— j а
р
sin
со/
d
(со/)
Взяв интегралы, найдем
а
=
4а
р
/(ла).
(13.22)
Таким образом,
при
заданной амплитуде реле а
р
, после гармо-
нической линеаризации, нелинейность
F (a sin со/)
оказалась
за-
мененной линейным звеном
с
коэффициентом усиления
q,
обратно
пропорциональным входной амплитуде
а.
Вместо нелинейности введен пучок прямых
с
углами наклона
(рис.
13.12)
а
=
arctg
q.
(13.23)
С этой меняющейся
в
зависимости
от
амплитуды
а
статической
характеристикой нелинейность
и
войдет
в
состав математической
модели цепи звеньев
под
видом уравнения
(13.19).
На
первый
взгляд
это
уравнение такое
же, как
ранее полученное
для
многих
кинематических звеньев типа идеального регулятора
или
серво-
мотора
с
очень малым временем
Т
а
. На
самом деле
эти
виды звеньев
принципиально между собой различаются именно из-за перемен-
ности коэффициента
q.
Нелинейность
F(x, рх).
Если задана нелинейность,
по
выходе
из которой первая гармоника координаты
х
н
выражена
не
только
первым,
но и
вторым членом
в
правой части
(13.11),
то
получим
два члена
в
гармоническом коэффициенте усиления:
<7i
Aj
(a)!a;
q
2
= А
2
(а)!а,
(13.24)
где
A
t
и A.t
вычисляются
по
формулам
(13.12)
и
(13.13).
221
Коэффициент
q
2
просто привести
к
входной координате
х,
заметив,
что рх =
аа>
cos со/ и
cos
со/
=
рх/(аа).
(13.25)
Использовав
эти
выражения, второй член
в (13.11)
запишем
в та-
кой форме:
А
2
(a) cos
со/
=
(Л
2
(а)/а)
рх/а =
(<7
2
/со) /?дг.
(13.26)
С учетом
(13.19) для
первого члена уравнения
(13.11)
выпол-
ненная гармоническая линеаризация нелинейности примет
вид
(обозначим
ее
просто
F (х))
F
(х) = q
lX
+ (qjn) рх. (13.27)
Формула
(13.27)
выясняет,
что
выходная координата
за
нели-
нейным элементом зависит
не
только
от
амплитуды
а
колебаний
при входе,
но
также
от
частоты
со и
скорости изменения входной
координаты.
Пример. Рассмотрим петлевую нелинейность
гистерезисногю типа
(рис. 13.13). Для нее при
ско-
рости
х > 0
изменение
F (х, рх)
изображено кривой
/, а при х < О
кривой
2. При
этом,
как
видно
на рис.
13.13,
рост функции
F
(х, рх) с
увеличением
х
отстает
по
сравнению
с
ходом
ее
изме-
нения
по
прямой
F (х) = qx
(прямая
3). Это
отставание статиче-
ской характеристики нелинейности сказывается
на ее
первой
гармонике
в том, что
происходит отставание
по
фазе выходной
ко-
ординаты
х
н
от
входной
х.
Вместе
с тем,
выражение
под
интегралом
в
(13.13) при х = a sin со/
можно привести
к
виду
(13.14).
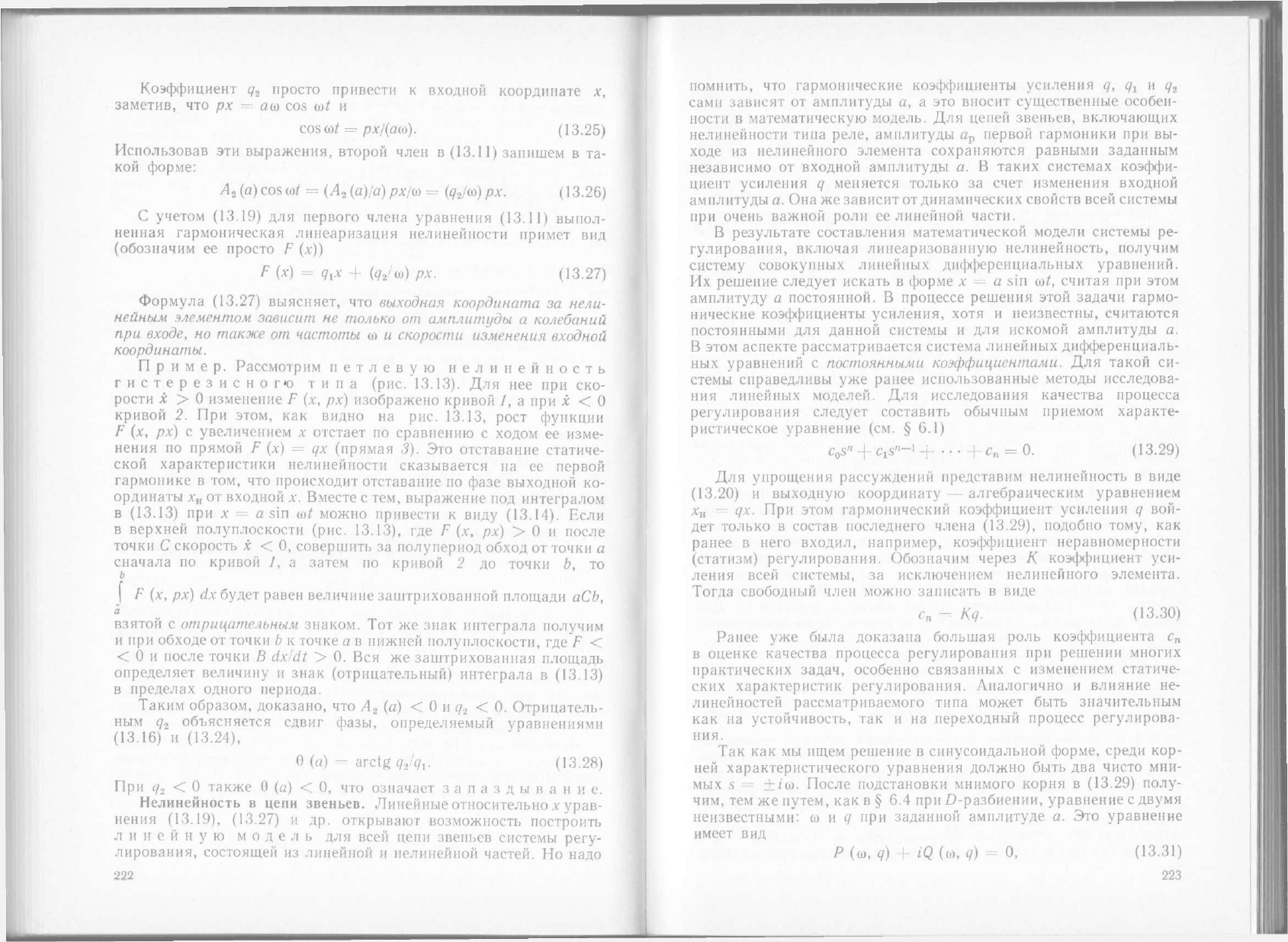
Если
в верхней полуплоскости
(рис. 13.13), где F (х, рх) > 0 и
после
точки
С
скорость
х < 0,
совершить
за
полупериод обход
от
точки
а
сначала
по
кривой
/, а
затем
по
кривой
2 до
точки
Ь, то
ь
|
F (х, рх) dx
будет равен величине заштрихованной площади
аСЬ,
а
взятой
с
отрицательным знаком.
Тот же
знак интеграла получим
и
при
обходе
от
точки
Ь к
точке
а в
нижней полуплоскости,
где F <
<
0 и
после точки
В
dxldt
> 0. Вся же
заштрихованная площадь
определяет величину
и
знак (отрицательный) интеграла
в (13.13)
в пределах одного периода.
Таким образом, доказано,
что А
2
(а) < 0 и q
2
< 0.
Отрицатель-
ным
q
2
объясняется сдвиг фазы, определяемый уравнениями
(13.16) и (13.24),
9 (а) =
arctg
q
2
l
qi
.
(13.28)
При
q
2
< 0
также
G (а) < 0, что
означает
з а п а з д ы в а н и е.
Нелинейность
в
цепи звеньев. Линейные относительно
х
урав-
нения
(13.19), (13.27) и др.
открывают возможность построить
линейную модель
для
всей цепи звеньев системы регу-
лирования, состоящей
из
линейной
и
нелинейной частей.
Но
надо
222
помнить,
что
гармонические коэффициенты усиления
q, q
x
и q
2
сами зависят
от
амплитуды
о, а это
вносит существенные особен-
ности
в
математическую модель.
Для
цепей звеньев, включающих
нелинейности типа реле, амплитуды
а
р
первой гармоники
при вы-
ходе
из
нелинейного элемента сохраняются равными заданным
независимо
от
входной амплитуды
а. В
таких системах коэффи-
циент усиления
q
меняется только
за
счет изменения входной
амплитуды
а. Она же
зависит
от
динамических свойств всей системы
при очень важной роли
ее
линейной части.
В результате составления математической модели системы
ре-
гулирования, включая линеаризованную нелинейность, получим
систему совокупных линейных дифференциальных уравнений.
Их решение следует искать
в
форме
х = a sin со/,
считая
при
этом
амплитуду
а
постоянной.
В
процессе решения этой задачи гармо-
нические коэффициенты усиления, хотя
и
неизвестны, считаются
постоянными
для
данной системы
и для
искомой амплитуды
а.
В этом аспекте рассматривается система линейных дифференциаль-
ных уравнений
с
постоянными коэффициентами.
Для
такой
си-
стемы справедливы
уже
ранее использованные методы исследова-
ния линейных моделей.
Для
исследования качества процесса
регулирования следует составить обычным приемом характе-
ристическое уравнение
(см. § 6.1)
c
0
s" +
Cl
s"-' -t hc„ = 0. (13.29)
Для упрощения рассуждений представим нелинейность
в
виде
(13.20) и
выходную координату
—
алгебраическим уравнением
х
н
= qx. При
этом гармонический коэффициент усиления
q
вой-
дет только
в
состав последнего члена
(13.29),
подобно тому,
как
ранее
в
него входил, например, коэффициент неравномерности
(статизм) регулирования. Обозначим через
К
коэффициент уси-
ления всей системы,
за
исключением нелинейного элемента.
Тогда свободный член можно записать
в
виде
с
п
Kq- (13.30)
Ранее
уже
была доказана большая роль коэффициента
с
п
в оценке качества процесса регулирования
при
решении многих
практических задач, особенно связанных
с
изменением статиче-
ских характеристик регулирования. Аналогично
и
влияние
не-
линейностей рассматриваемого типа может быть значительным
как
на
устойчивость,
так и на
переходный процесс регулирова-
ния.
Так
как мы
ищем решение
в
синусоидальной форме, среди кор-
ней характеристического уравнения должно быть
два
чисто мни-
мых
s = +/со.
После подстановки мнимого корня
в (13.29)
полу-
чим,
тем же
путем,
как в § 6.4 при
D-разбиении, уравнение
с
двумя
неизвестными:
со и q при
заданной амплитуде
а. Это
уравнение
имеет
вид
Р
(со, q) + iQ (со, q) = 0, (13.31)
223

где
Р (со, q) —
содержит лишь четные степени
со; Q (со, q) —
только
нечетные степени
со.
Приравняв нулю порознь вещественную
и
мнимую части
в (13.31), получим
два
уравнения
с
двумя неизвестными
(со и q):
...
-
с„_
в
со
6
-Ь
с„_
4
со
4
-
с„.
2
со
2
+ с
п
= 0;
(13.32)
...
-
с„_
7
со
6
-f
с„_
5
со
4
-
с„.
3
со
2
-f
c
n
_j = 0.
(13.33)
При невысокой степени характеристического уравнения полу-
чаются очень простые формулы
для
определения критической
ча-
стоты
со
к
. Так,
например,
для п = 2
со
к
= Vcjc
0
; (13.34)
для
п — 3 при
с
х
с
2
=
С
0
С
3
**
=
Vcjcil
(13.35)
для п = 4 при с
3
(ЙС
2
—
с
0
с
3
)
— с\с
А
= 0
®f
=
Y~(hJcv
(13.36)
В строках (13.35)—(13.36) записаны определители Гурвица
(6.3)
и
(6.5),
которые
при
мнимых корнях равны нулю. Кстати
сказать, выражая критическую частоту через коэффициенты
из
одного уравнения (13.32)
или
(13.33)
и
подставляя
ее в
другое,
можно получать критерии Гурвица.
Таким образом, определив критическую частоту
из
(13.33)
и найдя
из
приравненного нулю оперделителя Гурвица свобод-
ный член
с
п
,
содержащий
q
согласно (13.30), можно вычислить
и
амплитуду
а
перед нелинейным элементом,
при
которой могут
возникнуть периодические колебания.
Об
устойчивости этих коле-
баний можно судить непосредственно
по
значениям критерия
Гурвица
при
малых отклонениях амплитуды
а или
воспользо-
ваться методом D-разбиения
по
параметру
а (см. § 6.4). Для
этой
же
цели можно использовать
и
другие
не
менее эффективные
методы. Ниже рассмотрим один
из них.
Передаточные функции.
Для
нелинейного элемента после
его
линеаризации остается
в
силе
то же
понятие передаточной функ-
ции,
как для
линейного звена,
W
B
(a) =
«выхДвх-
(13.37)
В
§ 5.5
было доказано,
что в
линейных системах гармониче-
ские колебания, поступающие
к
входу
в
звено, преобразуются
в
нем
также
в
гармонические колебания,
но с
другими амплитудой
и фазой,
что и
выражено
в
амплитудно-фазовой характеристике
в
(5.47).
Допустим,
что в
данном нелинейном элементе после
его
линеаризации
нет
сдвига фазы,
т. е. F (х) = qx,
амплитуда
же
синусоидальных колебаний увеличивается
в
отношении
А
х
'а
согласно (13.18).
В
таком случае передаточная функция нелиней-
224
^,(;,)UL
s
l-,
W
H
(S)
Wj,(S)
W„(s)
Рис.
13.14.
Разомкнутая структурная схема
с
нелинейным
звеном:
W
a
(s) —
передаточная
функция линейной части
системы;
W
n
(s) —
эквивалентная
пере-
даточная
функция нелинейного элемента (после линеаризации);
g
—управляю-
щее
воздействие
Рис.
13.15.
Замкнутая структурная схема
с
нелинейным зпеном
ного элемента представляет собой гармонический коэффициент
усиления
q, т. е.
W
H
(а) = q. (13.38)
Если была
бы
нелинейность типа
F (х, рх), то
передаточная
функция определилась
бы из (13.27).
Передаточную функцию всей линейной части системы, включая
и возможную линейную часть нелинейного звена, выделим
как
одно эквивалентное звено
с
передаточной функцией
W„ (s)
(рис.
13.14). В
целом передаточная функция всей системы, разомк-
нутой
за
нелинейным элементом,
с
возмущением
g (t)
перед
ли-
нейным эквивалентным звеном представлена произведением
W
u
(a) W„ (s), а
частотная характеристика
—
произведением
W ((со) W
n
(a) W.
n
(ш). (13.39)
Устойчивость. Располагая передаточной функцией всей
си-
стемы регулирования, можно обычными методами выяснить
во-
прос
об ее
устойчивости. Если нелинейность относится
к
разряду
вредных
и
вызываемые
ею
периодические колебания нежелательны,
их надо устранять, выполнив требования критериев устойчивости.
Для этого следует смягчать влияние нелинейности
как
путем
из-
менения
ее
характеристики,
так и за
счет корректировки переда-
точной функции линейной части. Если
же
введена нелинейность
типа двухпозиционного реле,
то
режим периодических колебаний
должен существовать
(см. § 13.3) и
необходимо лишь
в
этом убе-
диться. Ниже проведен анализ именно этого вида колебаний.
Автоколебания. Режим автоколебаний
в
замкнутой системе
возможен, если амплитудно-фазовая характеристика разомкнутой
системы проходит
на
плоскости
W (/со)
через точку
—1 (см.
рис.
6.7). В
системе
с
нелинейностью, коэффициент усиления
которой зависит
от
амплитуды
а,
периодические колебания воз-
никают лишь
при
определенных критических пара-
метрах
со
к
и а
к
,
когда частотная характеристика
(13.39)
удовлетворяет условию
W„ (a) W„ (/to) = —1 или
Wx(ia>) = — l/W
H
(а). (13.40)
Правая часть
(13.40) это —
обратная отрицательная ампли-
тудно-фазовая характеристика линейной цепи звеньев. Отрицатель-
8
Кириллов
и. и. 225
U(w)
1/H'Ja)
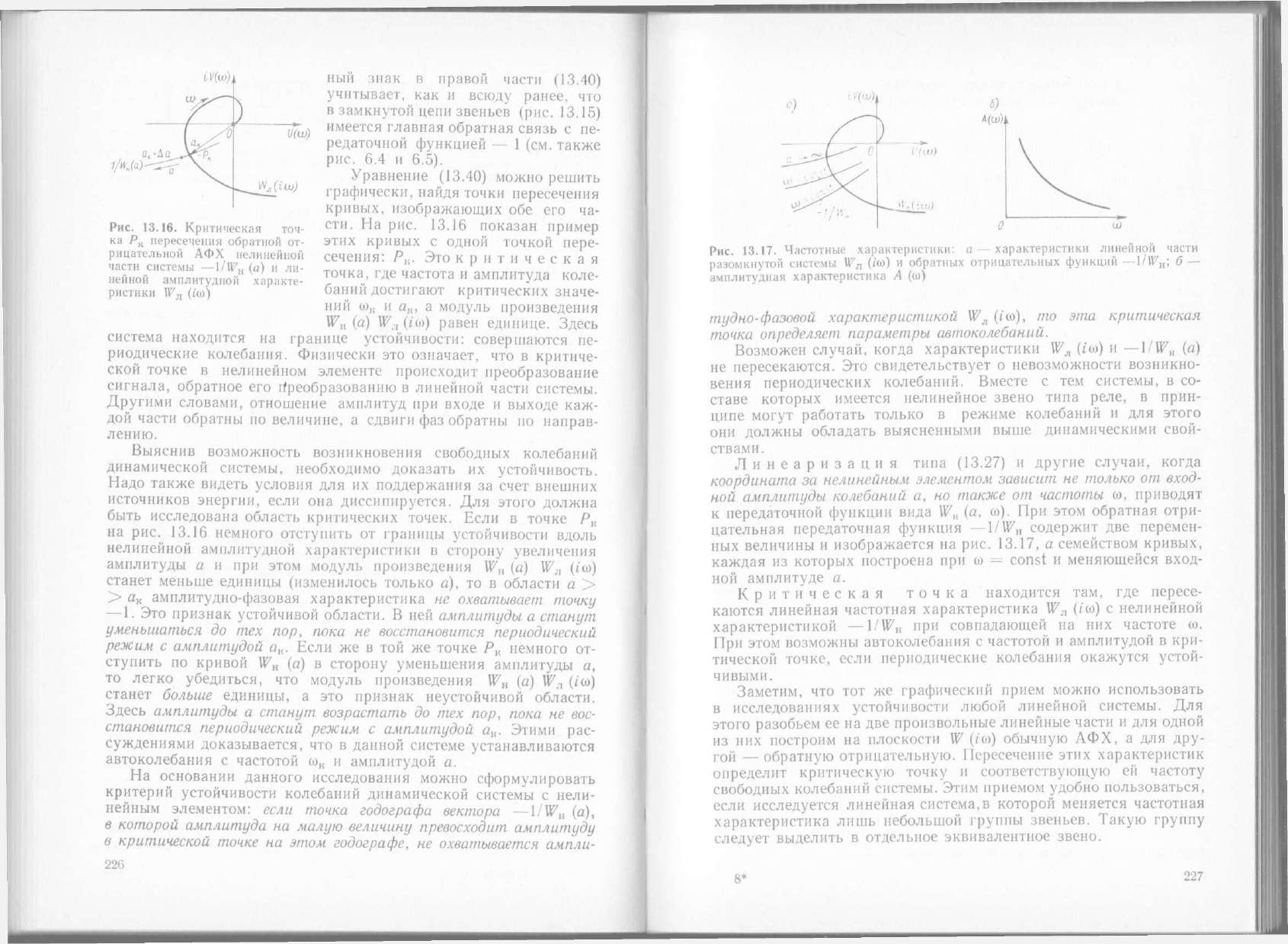
Рис.
13.16.
Критическая
точ-
ка
Р
к
пересечения обратной
от-
рицательной
АФХ
нелинейной
части
системы
—\IW
K
(a)
и ли-
нейной
амплитудной характе-
ристики
№
л
(г'ш)
iV(u>)k
ный
знак
в
правой части
(13.40)
учитывает,
как и
всюду ранее,
что
в замкнутой цепи звеньев
(рис. 13.15)
имеется главная обратная связь
с пе-
редаточной функцией
— 1
(см.
также
рис.
6.4 и 6.5).
Уравнение
(13.40)
можно решить
графически, найдя точки пересечения
кривых, изображающих
обе его ча-
сти.
На рис. 13.16
показан пример
этих кривых
с
одной точкой пере-
сечения:
Р
к
.
Это
критическая
точка,
где
частота
и
амплитуда коле-
баний достигают критических значе-
ний
со
к
и а
к
, а
модуль произведения
W„
(a) W
n
(/со)
равен единице. Здесь
система находится
на
границе устойчивости: совершаются
пе-
риодические колебания. Физически
это
означает,
что в
критиче-
ской точке
в
нелинейном элементе происходит преобразование
сигнала, обратное
его
преобразованию
в
линейной части системы.
Другими словами, отношение амплитуд
при
входе
и
выходе каж-
дой части обратны
по
величине,
а
сдвиги
фаз
обратны
по
направ-
лению.
Выяснив возможность возникновения свободных колебаний
динамической системы, необходимо доказать
их
устойчивость.
Надо также видеть условия
для их
поддержания
за
счет внешних
источников энергии, если
она
диссипируется.
Для
этого должна
быть исследована область критических точек. Если
в
точке
Р
к
на
риа 13.16
немного отступить
от
границы устойчивости вдоль
нелинейной амплитудной характеристики
в
сторону увеличения
амплитуды
а и при
этом модуль произведения
W
u
(a) W
n
(/со)
станет меньше единицы (изменилось только
а), то в
области
а >
>
а
к
амплитудно-фазовая характеристика
не
охватывает точку
—1.
Это
признак устойчивой области.
В
ней
амплитуды
а
станут
уменьшаться
до тех пор,
пока
не
восстановится периодический
режим
с
амплитудой
а
к
.
Если
же в той же
точке
Р
к
немного
от-
ступить
по
кривой
W
H
(а) в
сторону уменьшения амплитуды
а,
то легко убедиться,
что
модуль произведения
W
H
(а) №
л
(/со)
станет больше единицы,
а это
признак неустойчивой области.
Здесь амплитуды
а
станут возрастать
до тех пор,
пока
не
вос-
становится периодический режим
с
амплитудой
а
к
.
Этими рас-
суждениями доказывается,
что в
данной системе устанавливаются
автоколебания
с
частотой
со
к
и
амплитудой
а.
На основании данного исследования можно сформулировать
критерий устойчивости колебаний динамической системы
с
нели-
нейным элементом: если точка годографа вектора
—\/W
u
(а),
в которой амплитуда
на
малую величину превосходит амплитуду
в критической точке
на
этом годографе,
не
охватывается ампли-
226
Рис.
13.17.
Частотные характеристики:
а —
характеристики линейной части
разомкнутой
системы
W
n
(ico) и
обратных отрицательных функций
— l/W
H
; б —
амплитудная
характеристика
А (со)
тудно-фазовой характеристикой
W
n
(/со),
то эта
критическая
точка определяет параметры автоколебаний.
Возможен случай, когда характеристики
W
n
(/со)
и —1/W„ (а)
не пересекаются.
Это
свидетельствует
о
невозможности возникно-
вения периодических колебаний. Вместе
с тем
системы,
в со-
ставе которых имеется нелинейное звено типа реле,
в
прин-
ципе могут работать только
в
режиме колебаний
и для
этого
они должны обладать выясненными выше динамическими свой-
ствами.
Линеаризация типа
(13.27)
и
другие случаи, когда
координата
за
нелинейным элементом зависит
не
только
от
вход-
ной амплитуды колебаний
а, но
также
от
частоты
со,
приводят
к передаточной функции вида
W
H
(а, со). При
этом обратная отри-
цательная передаточная функция
—1/№„
содержит
две
перемен-
ных величины
и
изображается
на
рис. 13.17,
а
семейством кривых,
каждая
из
которых построена
при со =
const
и
меняющейся вход-
ной амплитуде
а.
Критическая точка находится
там, где
пересе-
каются линейная частотная характеристика
W
n
(/со)
с
нелинейной
характеристикой
—l/W
u
при
совпадающей
на них
частоте
со.
При этом возможны автоколебания
с
частотой
и
амплитудой
в
кри-
тической точке, если периодические колебания окажутся устой-
чивыми.
Заметим,
что тот же
графический прием можно использовать
в исследованиях устойчивости любой линейной системы.
Для
этого разобьем
ее на
две
произвольные линейные части
и для
одной
из
них
построим
на
плоскости
W
(/со)
обычную
АФХ,
а для
дру-
гой
—
обратную отрицательную. Пересечение этих характеристик
определит критическую точку
и
соответствующую
ей
частоту
свободных колебаний системы. Этим приемом удобно пользоваться,
если исследуется линейная система,
в
которой меняется частотная
характеристика лишь небольшой группы звеньев. Такую группу
следует выделить
в
отдельное эквивалентное звено.
8*
227
§
13.5.
ФИЛЬТРУЮЩИЕ СВОЙСТВА
ЛИНЕЙНЫХ
СИСТЕМ РЕГУЛИРОВАНИЯ
Когда
за
звеном
с
сильной нелинейностью действитель
ные колебаний заменяются лишь первой
их
гармоникой, возни
кает вопрос
о
погрешности такого метода решения задачи. Ошибка
от указанной замены происходит изза пренебрежения более
высокими гармониками.
Их же
влияние
на
процесс зависит
от
способности всей линейной части системы пропускать
или
гасить
колебания различной частоты.
Это
свойство фильтра низко
частотных колебаний
в
линейных системах
и
будет ниже рассмо
трено.
Роль
АФХ
линейной части.
Для
конкретности будем иметь
в виду свободные колебания системы, состоящей
из
линейной
части
и
нелинейного элемента, исследованного
в § 13.4.
Периоди
ческие колебания такой системы находятся
из
уравнения
(13.40),
которому
с
учетом
(13.39)
и с
выделенной нелинейностью можно
придать
вид
W
:i
(tco) F (х)1х +1 = 0,
(13.41)
где
W„ (fсо) — АФХ
всей линейной части системы, разомкнутой
перед нелинейным элементом;
F
(х)—нелинейность вида
(13.20),
(13.27)
или
более сложной функции
от
входной величины
л; и её
производных
по
времени, причем
F (x)lx — F' (х) = W
u
.
Уравнение
(13.41)
имеет смысл характеристического уравнения
рассматриваемой динамической системы
при s = ш (см. § 6.5).
Этим уравнением
и
воспользуемся
для
того, чтобы составить диф
ференциальное уравнение колебаний
и
выделить
в нем
нелиней
ность
F (х)
методом Dразбиения
(см. § 6.4). В
результате этих
операций получим дифференциальное уравнение
(в
изображениях
аналогичное
(6.11)),
опуская штрих
при F,
[Р
(р) + Q(p) F (х)]х 0.
(13.42)
В этом уравнении после линеаризации действительная нели
нейность была заменена приближенным линейным выражением
(13.27)
с
оператором
F
(х) = (<7i + (flM) Р
1
х,
(13.43)
где
coj —
частота первой гармоники.
Для того чтобы линеаризованное уравнение
(13.42)
мало
от
личалось
от
исходного нелинейного, требуются определенные
ка
чественные показатели, устанавливающие соотношения между
функциями
(в
изображениях)
Р (s), Q (s) и F (х). Для
этого надо
оценить относительно первой гармоники влияние
на
процесс
каждой гармоники
и
суммы
их в
целом.
оо
оо
£
Р
п
- U а
п
sin (o)J f
0„), (13.44)
где
со„ =
ncoj
—
частота
пй
гармоники.
228
Во всех наших задачах высшие гармоники будут быстро стре
миться
к
нулю,
и
законность
их
устранения
не
вызывает сомнений.
Но некоторые низкочастотные гармоники могут иметь немалые
амплитуды
по
сравнению
с
первой,
и
пренебрегать
ими
имеется
основание только
в том
случае, если малы коэффициенты,
с
кото
рыми
они
вошли
в
решение уравнения
(13.42).
Это
обоснование
можно дать чисто аналитическим методом
с
помощью разложения
функции
F (х) в
ряды Тейлора
и
Фурье
с
учетом членов, содержа
щих высшие гармоники
в
качестве малых величин
[54]. Но го
раздо проще вопрос этот можно разъяснить, применив частотные
методы, особенно эффективные
в
таких исследованиях.
Линеаризованное дифференциальное уравнение
(13.42),
после
замены
р на s
станет характеристическим уравнением вида
(5.27).
Располагая
им,
легко применить метод Dразбиения
(см. § 6.4),
взяв
за
параметр функцию
F (х).
Таким способом уравнению
(13.42)
можно придать
вид,
аналогичный
(6.11)
Р
(s) + F (х) Q (s) = 0,
(13.45)
а
при s =
t
со
записать
1 ! W
n
(ш) F (х) = 0,
(13.46)
где
W
n
(tio) = Q
(tco)AP
(ico) —
частотная характеристика всей
ли
нейной части данной системы.
Нелинейность
F (х),
разложенная
в ряд
Фурье, содержит
как
первую гармонику, выраженную уравнением
(13.43),
так и
сумму
более высоких гармоник
(13.44).
Заметив,
что для
симметричных
колебаний, которые здесь имеются
в
виду, свободный член
в
ряду
Фурье
F
0
= 0,
нелинейную функцию можно представить
в
форме
оо
F(x)
= A sin ((V +
9iH
Hi Fn,
(13.47)
n=2
где
co
x
и 0j —
частота первой гармоники
и ее
фаза.
Если
в
(13.46)
гармоники вводить раздельно,
как это
было
сделано
с
первой гармоникой,
то
получим решения, отвечающие
свободным колебаниям системы
при
частотах
ka
Y
. Для
каждой
из
них
по
известной частотной характеристике найдем свою вели
чину модуля
W
n
(mcOi)
и
введем
ее в
качестве коэффициента
при
нелинейности
F (х) в
уравнение вида
(13.46).
Найденный коэффи
циент надо сравнить
с
аналогичным коэффициентом
при F (х)
первой гармоники
W„
(tco).
Отношение этих коэффициентов
W
n
{тщ)№
п
(fo>0
=
[Q (тщ)/Р (шсо
х
)]/[д ({щ)/[Р
(13.48)
и определяет фильтрующую способность линей
ной части системы
в
зависимости
от
частоты колебаний.
Из
(13.46)
и
(13.48)
следует,
что
критерием малого влияния гармоник
по
сравнению
с
первой служит неравенство
Q
(1пщ)/Р
(mcOi)
< Q
{1щ)1Р
(icoj)
или W„(nia)
« W
a
(ia).
(1349)
229

В
простейшем случае, когда безынерционная нелинейность
имеет
вид F (х) = qx, и q
представляет собой передаточное число
нелинейного звена, меняющееся
в
зависимости
от
амплитуды
а,
замена перед
F(x) в
(13.46)
коэффициента
W
n
(iw) на №
л
(ш'со)
означает пропорциональное изменение этого передаточного числа.
Значительное
же
уменьшение передаточного числа
с
увеличением
частоты
—
свидетельство большого сопротивления
со
стороны
линейной части системы проникновению высокочастотных гар-
моник.
При
этом высокочастотные колебания гасятся несмотря
на, возможно, большую
их
амплитуду
за
нелинейным звеном.
Если частоту устремить
к
бесконечности,
то в
силу своей инер-
ционности линейная часть становится непроницаемой.
На
рис.
13.17,
б
изображена типичная
для
разомкнутой схемы
величина
А (со)
модуля
W„ (/со) в
зависимости
от
частоты
со. По
мере роста частоты модуль быстро уменьшается. Низкочастотные
гармоники сравнительно свободно проходят сквозь линейную
часть системы,
и
перед нелинейным звеном устанавливаются коле-
бания большой амплитудц.
Рассмотрим
в
качестве примеров фильтрующую способность
типовых звеньев.
Нелинейность будем считать однозначной
и
нечетной,
так что
гармоники будут только нечетными.
При
этом
в
ряде Фурье будут
отсутствовать свободный член
и
члены
с
косинусами,
и ряд при-
оо
мет
вид F (х) = XI An sin naj, где
л=1
я
А
п
= 2/я | F (a sin
шо^)
sin tiaj d
(со^);
п = 1,
3,5,...
б
Гармоники этого ряда будем раздельно подводить
к
входу
в исследуемое звено.
Интегрирующее звено.
Его
передаточная функция
(7.25)
W(s) = k/(Ts),
где
k —
коэффициент усиления.
Для периодических колебаний
s =
mcoj.
Частотные характе-
ристики устанавливают отношение выходной амплитуды
к
вход-
ной
и
сдвиг
по
фазе
(см.
(7.26)).
При прохождении сигнала сквозь интегрирующее звено ампли-
туда изменяется пропорционально модулю
\W
{ina>A,
причем
|
W (1пщ) \ =
ЫТпщ.
Следовательно, амплитуда
Л,
первой гармоники нелинейности
после прохождения сигнала сквозь интегрирующее звено изме-
нится
до
величины А^ЫТщ,
а
амплитуда
n-й
гармоники
А
п
— до
величины
AJnTa*,
т. е. в
интегрирующем звене амплитуда
изменяется обратно пропорционально номеру гармоники. Кроме
того,
только единичные низкочастотные гармоники могут иметь
230
амплитуды,
в
какой-то мере сравнимые
с
амплитудой первой гар-
моники.
Эти общие соображения приводят
к
выводу
о
высоком фильтру-
ющем эффекте интегрирующего звена.
Апериодическое звено.
Для
него имеем передаточную функ-
цию
(7.6)
W
(s) = k/(\ + Ts)
и
при s — ico —
частотную характеристику
W (ico) = k/(l +
Ti'co).
Следовательно,
при
прохождении гармоники сквозь апериодиче-
ское звено амплитуда изменяется
в
зависимости
от
частоты
п^
согласно закономерности
(7.10)
А
(пщ) = klV 1 +
(Тпщ)
2
.
Как видно, уменьшение амплитуды
в
зависимости
от
номера
гармоники происходит, хотя
и в
меньшем темпе,
чем в
интегриру-
ющем звене,
но все же
весьма существенно. Отмеченное некоторое
снижение фильтрующей способности апериодического звена
по-
рождается
его
элементом типа обратной связи. Выключающее
действие этого элемента вызывает подтормаживающий эффект,
уменьшая влияние
сил
инерции
по
сравнению
с их
воздействием
на процесс
в
интегрирующем звене.
Эти
соображения подтверж-
даются
и
сдвигом
фаз,
большим
у
интегрирующего звена.
Колебательное звено. Аналогично предыдущим примерам,
здесь коэффициент изменения амплитуды звена определяется
ам-
плитудной характеристикой звена
(7.19)
А
(пщ) = kl(l- {Tnutf)
2
+
(Т.пщ)
2
)-
0
'
5
.
Здесь увеличение
п
приводит
к
уменьшению первого
и
увели-
чению второго члена
под
корнем
в
знаменателе. Значит,
в
области
больших величин
Т
(например,
при
большой колеблющейся массе
и малой жесткости пружины)
и
малых
Т
1
амплитуды становятся
значительными.
При
больших
же 7\
(скажем,
при
значительном
трении типа катаракта)
и при
малых
Т,
возникает обратный
эффект. Наибольшее увеличение амплитуды достигается
при
опре-
деленном соотношении
(7.21)
между динамическими констан-
тами
Т и 7V Та
гармоника,
для
которой
п^
близко
к со
р
,
про-
ходит сквозь колебательное звено
с
наибольшим усилением.
§
13.6.
ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
ПРОЦЕССОВ РЕГУЛИРОВАНИЯ
Стремление придать анализу нелинейных систем гео-
метрическое толкование
и тем
самым достичь наглядности
и
повы-
сить точность решения давно наблюдалось
в
теории регулирова-
ния.
В
частности,
в
этом направлении развивалась французская
231

школа регулирования, основоположником которой
был О.
Леоте.
К этому разделу теории регулирования относится
и
понятие
фазовой плоскости.
Математическая модель динамической системы
с п
степенями
свободы представляет собой
в
общем виде систему
п
дифферен-
циальных уравнений второго порядка.
При
общем порядке системы
2п
ее
состояние (фаза)
в
любой момент времени определяется
2п
числами.
Ими
можно задать точку
в
некотором пространстве,
имеющем
2п
измерений. Каждой точке такого пространства,
называемого фазовым, соответствует одно определенное
со-
стояние динамической системы, меняющееся
в
течение процесса.
Основная идея геометрического направления
и
заключается
в
том,
чтобы сделать обозримым
в
фазовом пространстве
все
возможные
состояния заданной динамической системы.
Для системы второго порядка фазовое пространство становится
двухмерным
и
представляется
как
фазовая плоскость.
Этот метод находил применение
и в
теории регулирования машин
при решении некоторых нелинейных задач. Имея
в
виду ценность
его приложения
для
решения ряда практических задач
и для
развития инженерного мышления, кратко изложим здесь основ-
ные идеи изображения процессов регулирования
на
фазовой пло-
скости.
Мы
ограничимся случаем, когда отсутствуют внешние
возмущения
по
отношению
к
данной динамической системе.
Фазовая плоскость. Основной вопрос
—
это
выбор осей
координат
на
фазовой плоскости.
От
его
решения зависят простота
исследования
и,
главное, ясность представления физических
процессов.
С
этих позиций
и
оценим геометрические методы изуче-
ния процессов регулирования
на
примере простейшего колеба-
тельного звена.
Уравнение движения колебательного
звена было
уже
записано
в § 7.2 в
виде
(без
правой части)
ТЧ
+ Т
х
х + х = 0.
(13.50)
Это уравнение представляет свободные колебания таких
ди-
намических систем,
как
масса
на
упругом основании, центро-
бежный маятник
при
постоянной частоте вращения
(§
10.3),
электрическая цепь, включающая конденсатор, индуктивное
и
реактивное сопротивления. Перепишем
(13.50),
выполнив эле-
ментарное преобразование подстановкой
d
2
xldt
2
=
(dxldx)
х,
Т
2
{dxldx)
х + Т
г
х + х = 0.
(13.51)
Из последнего уравнения очевидно,
что
состояние динамиче-
ской системы второго порядка полностью определяется координа-
тами
X И X.
Обозначив
х = у,
движение данной системы можно изучать
в плоскости
х, у. В
этой плоскости каждому состоянию системы
соответствует единственная точка
и,
наоборот, каждая точка
определяет состояние системы. Таким образом,
на
плоскости
х,
232
у отражены
все
возможные состояния
ди-
намической системы.
Это и
есть фазо-
вая плоскость.
Пусть какая-либо точка
на
фазовой пло-
скости определяет состояние системы.
Эту
точку назовем изображающей. Будем
непрерывно изменять состояние системы.
Тогда
на
фазовой плоскости изображающая
станет перемещаться
по
определен-
фазовым траекториям
13.18).
Но
это,
конечно,
не
обычные траектории
х
подчеркивает
их
название.
Рис.
13.18.
траектории
Фазовые
точка
ным
(рис.
13.18).
Но
это,
конечно,
не
обычные траектории
х = f (t),
что
и
Целой фазовой траекторией называется кривая, полученная
за
все время движения изображающей точки. Каждой точке
на фа-
зовой траектории соответствует определенный момент времени.
Непосредственно
на
фазовой диаграмме время
не
наносится,
но
его можно найти
по
уравнению
dt =
dxlx.
Промежуток времени
между двумя любыми точками фазовой траектории
ab
(рис.
13.19,
а)
можно вычислить
как
интеграл
ь
аЬ
J
(\/x)dx.
(13.52)
На
рис.
13.19,
б
этот отрезок времени
t
ab
изображен
в
виде
площади.
Траектория
на
фазовой плоскости начинается
от
заданного
начального состояния системы
с
координатами
х
0
и х
0
.
Про-
цесс устойчив, если
он
заканчивается
в
новом положении
равновесия, когда
х и х
стремятся
к
нулю.
На
фазовой плоско-
сти
—
это
начало координат
(рис. 13.18).
Система неустой-
чива, если фазовая траектория устремляется
в
бесконечность
(рис.
13.20).
Система совершает автоколеба-
ч
и и я,
если фазовые траектории становятся
замкнутыми кривыми
(рис.
13.21).
У
'
Рис.
13.19.
Промежуток времени, соответствующий участку фазовой траекто-
рии
t
a
b
Рис.
13.20.
Фазовая траектория неустойчивой системы
Рис.
13.21.
Фазовая диаграмма консервативного звена
233

Фазовые траектории
для
колебательного звена, разумеется,
легко построить,
так как нам
известно точное решение
его
диффе
ренциального уравнения.
Но
можно
и
непосредственно
из
диф
ференциального уравнения,
не
зная аналитического выражения
интеграла, дать довольно полную характеристику движения
изображающей точки
на
фазовой плоскости.
И в
этом заключается
особая ценность метода:
его
можно применять
в
сложных задачах,
например нелинейных, когда аналитические решения трудно найти
или
они
вообще
не
могут быть найдены. Покажем
эту
особенность
геометрического метода
на
простейшем примере.
Гармонический осциллятор. Если затухание очень мало
(Г, «
х
0), то
остаются только консервативные силы,
и из
(13.50)
получается дифференциальное уравнение гармонического движе
ния
ТЧ
+ х = 0.
(13.53)
Это уравнение совпадает
с
уравнением
(10.47),
для
которого
уже была установлена независимость
1/7 =
со„,
где
со
0
— цикли
ческая частота.
С заменой
Т на со
0
запишем
(13.53)
в
каноническом виде
х
fcoox==0. (13.54)
Это уравнение второго порядка заменим двумя эквивалент
ными уравнениями первого порядка:
х = у; у = —щх.
Исключив
время почленным делением этих уравнений, получим дифферен
циальное уравнение интегральных кривых
на
фазовой плоскости
dy/dx =
—щх/у.
(13.55)
Это уравнение представляет собой касательную
к
интеграль
ной кривой
в
любой точке фазовой плоскости, кроме точки
х = 0,
для которой правая часть
(13.55)
становится неопределенностью.
Это особая точка,
в
данном случае
—
центр.
Его
окружают фазовые траектории
(рис.
13.21).
Кстати напомним,
что такие системы,
в
которых может существовать бесчисленное
множество периодических движений
при
непрерывном переходе
от одного движения
к
другому, называются консерватив
ными. Таким образом,
мы
получили вместо дифференциального
уравнения второго порядка функции
х (t)
дифференциальное
уравнение первого порядка, связывающее
у и х. Это
существенное
преимущество данного метода.
В данном случае
(13.55)
элементарно интегрируется,
так как
переменные разделяются,
У
х
J
ydy +
со
а
J
х dx = 0.
После интегрирования найдем
у
2
у\ +
too
(х
2
х
2
) = 0.
(13.56)
234
Это уравнение семейства эллипсов,
вы
ражающее фазовый портрет кон
сервативного звена
(см. рис.
13.21).
При
одной
и той же
частоте
со
0
все
эллипсы
по
добны,
т. е.
имеют одинаковое соотношение
осей. Амплитуда
же а =
х
тах
(при у = 0)
зависит
не
только
от (о
0
, но и от
начальных
условий,
а
=
у/Хо+г/о/соо
(13.57)
В области положительных
у
координата
х
возрастает,
а при
отрицательных
у она
убывает.
Это
значит,
что
изображающая
точка движется вдоль любой фазовой траектории
по
часовой
стрелке.
За
период колебаний
т =
2я/со изображающая точка
на
диаграмме возвращается
в
исходное положение,
а
затем процесс
в точности повторяется. Наглядность геометрического метода
очевидна: одним взглядом можно охватить
все
возможные перио
дические колебания системы
в
зависимости
от
начальных условий.
Из
(13.57)
ясно,
что по
мере снижения начальной величины
координаты
х
амплитуда колебаний монотонно уменьшается.
Этот признак дает возможность судить
и об
устойчивости получен
ных периодических колебаний
при
любых начальных условиях,
кроме точки
х = у = 0, в
которой система находится
в
состоянии
устойчивого равновесия.
Затухающий колебательный процесс
(Т, > 0). Для
едино
образия запишем
(13.50),
сделав
две
подстановки:
1/Г
2
со
0
и
Ту/Т, = 2h,
х
+ 2hx +
со
2
,*
= 0.
(13.58)
Следуя только
что
изложенному методу, заменим
(13.58)
двумя
уравнениями первого порядка:
х
= у; у = — 2hy
—
<£>tx.
(13.59)
Исключив время, получим
dy/dx = — (2% +
щх)1у.
(13.60)
Решение уравнения
(13.60)
имеет
вид [3]
(у
+ hxf +
со?*
2
= С
ехр {2
(Л/со,)
arctg [(у
+
пх)/(щх)]\.
(13.61)
Это уравнение семейства фазовых траекторий, представляющих
собой семейство спиралей
с
асимптотической точкой
в начале координат
(рис.
13.22).
При
малых логарифмических
декрементах
h/щ
(см.
§ 9.3)
логарифмическая спираль
при
каждом
обороте близка
к
эллипсу
[3],
выраженному уравнением
с
кон
стантой
С,
у
2
+
2пху
4
со
2
,*
= С.
(13.62)
Рис.
13.22.
Семей
ство
спиралей
фазо
вых
траекторий
235
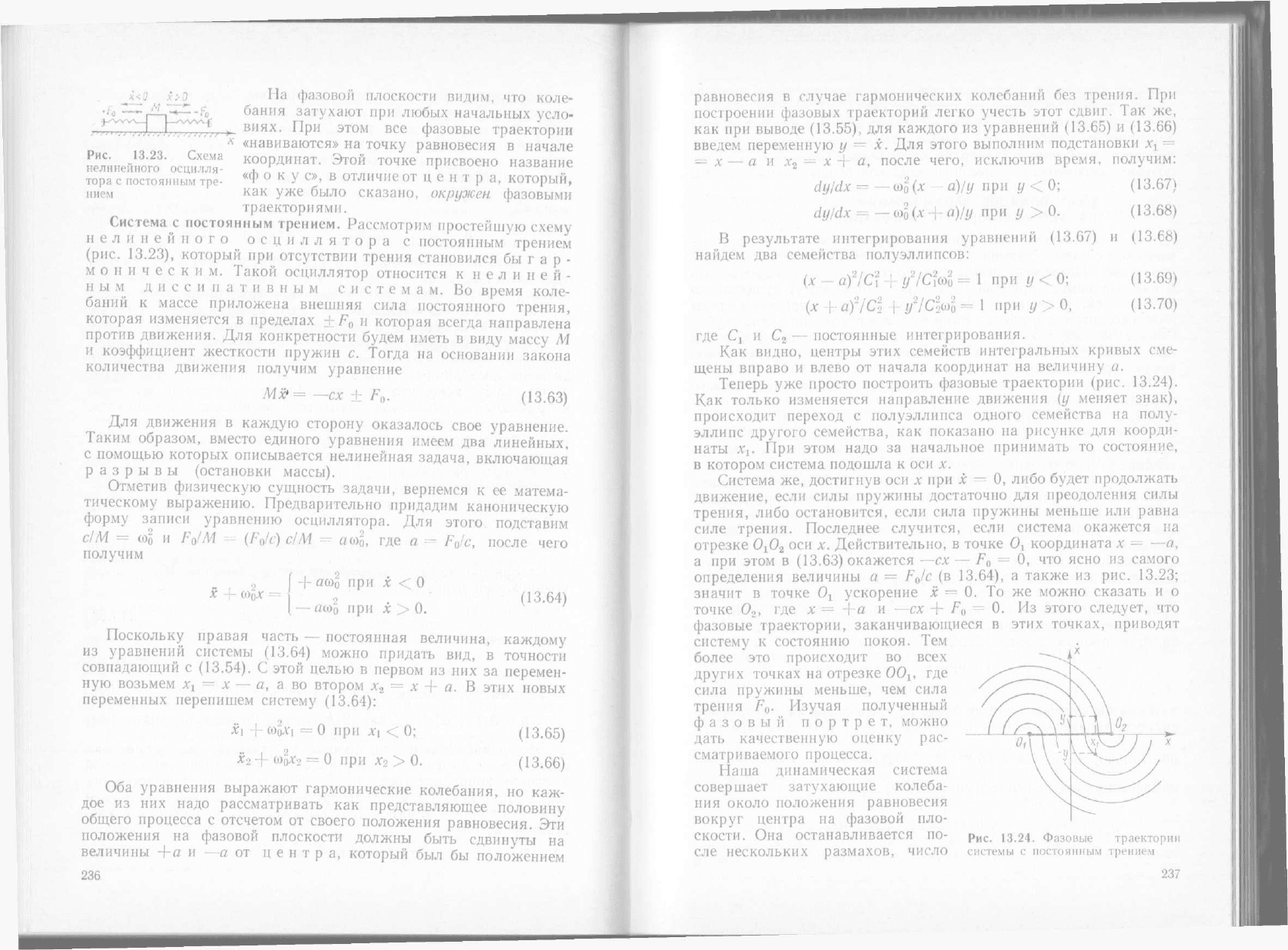
На фазовой плоскости видим,
что
коле-
бания затухают
при
любых начальных усло-
виях.
При
этом
все
фазовые траектории
* «навиваются»
на
точку равновесия
в
начале
Рис.
13.23.
Схема координат. Этой точке присвоено название
нелинейного осцилля-
„А,
„ „ ,,
F
""^
тора
с
постоянным тре-
«Ф
о к у с», в
отличие отцентра, который,
нием
как
уже
было сказано, окружен фазовыми
траекториями.
Система
с
постоянным трением. Рассмотрим простейшую схему
нелинейного осциллятора
с
постоянным трением
(рис.
13.23),
который
при
отсутствии трения становился
бы г а р -
ионическим. Такой осциллятор относится
к
нелиней-
ным
д и с с и п а т и в и ы м
системам.
Во
время коле-
баний
к
массе приложена внешняя сила постоянного трения,
которая изменяется
в
пределах
±F
0
и
которая всегда направлена
против движения.
Для
конкретности будем иметь
в
виду массу
М
и коэффициент жесткости пружин
с.
Тогда
на
основании закона
количества движения получим уравнение
Мх>
= —сх ±
F
0
.
(13.63)
Для движения
в
каждую сторону оказалось свое уравнение.
Таким образом, вместо единого уравнения имеем
два
"линейных,
с помощью которых описывается нелинейная задача, включающая
разрывы (остановки массы).
Отметив физическую сущность задачи, вернемся
к ее
матема-
тическому выражению. Предварительно придадим каноническую
форму записи уравнению осциллятора.
Для
этого подставим
с/М
= too и FQ/M
(FQ/C)
CIM
=
a cog,
где а = F
0
/c,
после чего
получим
.2.
+
аа»5
при х <
О
х
,
о>
0
х=
(13.64)
1
ст"
0
при х > 0.
Поскольку правая часть
—
постоянная величина, каждому
из уравнений системы
(13.64)
можно придать
вид, в
точности
совпадающий
с
(13.54).
С
этой целью
в
первом
из них за
перемен-
ную возьмем
х
х
= х — а, а во
втором
х
г
= х + а. В
этих новых
переменных перепишем систему
(13.64):
х\
A-
ova = 0 при х\ < 0;
(13.65)
Хч
А-
сооХг
= 0 при х
2
> 0.
(13.66)
Оба уравнения выражают гармонические колебания,
но
каж-
дое
из них
надо рассматривать
как
представляющее половину
общего процесса
с
отсчетом
от
своего положения равновесия.
Эти
положения
на
фазовой плоскости должны быть сдвинуты
на
величины
А-а и
— а
от
центра, который
был бы
положением
236
равновесия
в
случае гармонических колебаний
без
трения.
При
построении фазовых траекторий легко учесть этот сдвиг.
Так же,
как
при
выводе
(13.55),
для
каждого
из
уравнений
(13.65)
и
(13.66)
введем переменную
у = х. Для
этого выполним подстановки
х
х
=
=
х — а и х
2
= х
Аг
а,
после чего, исключив время, получим:
-
соо
(х
— а)1у
при у < 0;
dy/cix
=
dy/dx
= —
coo
(х
Аг
а)1У
при у > 0.
В результате интегрирования уравнений
(13.67)
найдем
два
семейства полуэллипсов:
(х
-
af/C'i -!
if/CWa
= 1 при у < 0;
(х
т
afId
f
iflCluii
=
1
при у > 0,
(13.67)
(13.68)
(13.68)
(13.69)
(13.70)
где
Cj и С
2
—
постоянные интегрирования.
Как видно, центры этих семейств интегральных кривых сме-
щены вправо
и
влево
от
начала координат
на
величину
а.
Теперь
уже
просто построить фазовые траектории
(рис. 13.24).
Как только изменяется направление движения
(у
меняет знак),
происходит переход
с
полуэллипса одного семейства
на
полу-
эллипс другого семейства,
как
показано
на
рисунке
для
коорди-
наты
х
х
. При
этом надо
за
начальное принимать
то
состояние,
в котором система подошла
к
оси
х.
Система
же,
достигнув
оси
х
при
х = 0,
либо будет продолжать
движение, если силы пружины достаточно
для
преодоления силы
трения, либо остановится, если сила пружины меньше
или
равна
силе трения. Последнее случится, если система окажется
на
отрезке
0
Х
0
2
оси
х.
Действительно,
в
точке
О]
координата
х = —а,
а
при
этом
в
(13.63)
окажется
—сх
— F
0
;
определения величины
а = FJc (в
13.64)
значит
в
точке
О
х
ускорение
х = 0. То же
можно сказать
и о
точке
0
2
, где х = +а и
— сх
+ F
0
= 0. Из
этого следует,
что
фазовые траектории, заканчивающиеся
в
систему
к
состоянию покоя.
Тем
более
это
происходит
во
всех
других точках
на
отрезке
00
lt
где
сила пружины меньше,
чем
сила
трения
F
0
.
Изучая полученный
фазовый портрет, можно
дать качественную оценку рас-
сматриваемого процесса.
Наша динамическая система
совершает затухающие колеба-
ния около положения равновесия
вокруг центра
на
фазовой пло-
скости.
Она
останавливается
ПО- р
ис
.
13
.
2
4.
Фазовые траектории
СЛе несКОЛЬКИХ раЗМЭХОВ,
ЧИСЛО
системы
с
постоянным трением
237
0,
что
ясно
из
самого
а также
из рис.
13.23;
этих точках, приводят

которых зависит
от
начальных условий. Состоянию покоя системы
соответствуют
все
точки
на
отрезке
О
х
0
2
.
Затухание колебаний
с
трением вполне закономерно, поскольку
диссипируется работа силы трения,
и
аккумулированная
к
началу
процесса механическая энергия постепенно снижается. Именно
поэтому невозможны гармонические колебания такой системы.
§
13.7.
ВЛИЯНИЕ ЗАПАЗДЫВАНИЯ
НА
УСТОЙЧИВОСТЬ РЕГУЛИРОВАНИЯ
Некоторые величины, определяющие состояние дина-
мической системы, изменяются
не
только
во
времени,
но и в
про-
странстве. Например, вдоль длинного газо-
или
паропровода
в каждый момент времени параметры потока могут существенно
различаться.
В
таких случаях, строго говоря, параметры среды
надо рассматривать
как
распределенные
по
длине трубы.
Считая
же их
сосредоточенными,
мы
создаем лишь
приближенную математическую модель,
не
всегда достаточно
точно отражающую действительность.
Многие задачи можно значительно упростить, если вместо
введения
в
уравнения дви'жения распределенных параметров огра-
ничиться учетом эффекта запаздывания.
Так,
например,
в случае камеры сгорания, связанной
с
турбиной длинным трубо-
проводом, после воздействия системы регулирования
на
расход
топлива
х
х
it)
проходит время
т
3
,
прежде
чем
начинает изменяться
температура газа перед турбиной
х
2
(t)-
Такого
же
вида процесс
наблюдается
и
при
других нелинейностях, например
при
включе-
нии тока
в
электрической цепи
(рис.
13.8).
Для
приближенной
оценки влияния запаздывания
на
процесс регулирования можно
начальный участок статической характеристики заменять отрез-
ком прямой,
как под
влиянием нечувствительности,
и
вводить
в уравнения движения время запаздывания
как
заданную постоян-
ную величину
т
3
=
const
(см. рис.
13.8).
Такая постановка задачи
приводит
к
линеаризации дифференциальных уравнений движения.
Теорема запаздывания. Рассмотрим функцию
/
х
(t),
описы-
вающую процесс
с
запаздыванием
на
время
т
3
(0
при
t < т
3
,
'•Н/»,-х,,
П
р„,>,,.
<
13
'
71
>
Если
бы
запаздывания
не
было,
то
процесс
той
же
в
остальном
системы характеризовался
бы
функцией
/ (t) и ее
изображением
оо
по Лапласу было
бы F
(s)
= \^~
si
f (t) dt. В
условиях
же за-
о
паздывания изображение функции
/ (/)
станет
оо
Т
3 оо
F
x
(s)
=
J
е-"/
т
(0 dt
=
Je-"/,
(/) dt
-f
j
ег-</,
(t) dt.
0
0 T
238
Здесь первый интеграл
в
правой части равен нулю согласно
(13.71),
а
второй можно записать
в
виде
сю
FAs)
=
\*-«f(t-
Xa)dL
Введем
под
интегралом новую переменную
t' = t —
т пре-
делы интегрирования
по
которой станут
0 и оо.
Для
этой пере-
менной
F
x
(s)=
J
е-'<''
+т
»>/(*')<»'
или
О
оо
Ms)
=
e-"
8
{e-'7(,')
d
,'.
о
А
так как
ничто
не
изменится, если
в
определенном интеграле
заменить
f на t,
то он
представляет собой преобразование Лапласа
F
(s)
оригинала
/ (t), т. е.
F
T
(
S
)=e~
s
V(
s)
.
(13
.72)
Таким образом доказано
что
эфф
ект
запаздывания
для
функ-
ции
f (t) в
изображении
по
Лапласу выражается дополнительным
множителем
е
3
.
Динамическая система
с
запаздыванием. Рассмотрим звено,
на выходе
из
которого
х
2
отличается
от
входной величины
х,
лишь постоянным запаздыванием,
т
.
е
. х
2
(t) = x
x
(t — х)
На основании теоремы запаздывания "можно
переписать
(13.72)
в
изображениях
х
2
=
е
-«
3
^.
Следовательно,
передаточная функция
для
особо выделенного звена
за-
паздывания
\SMs)
= e-
s
\
(13
.
73)
Передаточную функцию всей разомкнутой системы
без
запаз-
дывания обозначим
W (s).
Передаточная функция
Wis)
той
же
динамической системы,
но с
последовательно включенным звеном
запаздывания, независимо
от
места
его
включения равна произ-
ведению
W
x
(s) W (s) или V
W
(s)
=
е-"аГ
(s)
.
(13 74)
Амплитудно-фазовая характеристика
без
запаздывания имеет
вид
W (г'ш)
= А
(и)
e
I
'6(w)
)
(13.75)
а
с
запаздыванием после подстановки
s = ш в
(13.74)
W№
=
Л((о)
е
Чв(«)-т
зШ]
_
На основании формулы
(13.76)
заключаем,
что
при
гармониче-
ском воздействии перед входом
в
разомкнутую систему
с
запазды-
ванием устанавливаются
при
выходе
из
нее
также гармонические
239