Кириллов И.И. Автоматическое регулирование паровых турбин и газотурбинных установок
Подождите немного. Документ загружается.

где
л-
ш2
—
изменение регулируемого параметра
под
влиянием воз-
мущения
f,
передаваемого
к
объекту регулирования через регуля-
тор мощности.
Таким образом цепь регулятора мощности изменяет регули-
руемый параметр, стремясь
его
удержать
на
заданном уровне,
на величину
*
ш2
~=
WJ. (12.36)
Если, например, произошел внезапный наброс нагрузки
и
движение затормозилось,
то
регулятор мощности, сразу
же
реа-
гируя, увеличивает открытие регулировочных органов турбины,
повышает
ее
мощность
и
резко снижает падение частоты враще-
ния.
Это
значит,
что
сигнал
/ (t) при
прохождении
его
через
всю
цепь регулятора мощности оказывает
на
частоту прямо противо-
положное влияние
по
сравнению
с
непосредственным воздействием
этого возмущения
на
ротор турбины
(в
точке
А).
Другими словами,
изменения частот
х
ш1
и х
аг
имеют противоположные знаки,
и,
считая каждую
из
этих величин положительной,
в
суммирующем
звене получим
х
ш
= х
Ш
1 х
а
2- (12.37)
Здесь
х
ш2
введено
со
знаком минус
так же, как
ранее вводился
сигнал
от
параллельной отрицательной связи, например
в (8.23).
Таким образом,
в
результате внешнего воздействия
/ (t) и
поступающих сигналов
от
обоих регуляторов
в
замкнутую
си-
стему команда передается
к
турбине
с
передаточной функцией
Y
(s) = (X (s) - W
M
(s))/(l + W (s)). (12.38)
Передаточная функция должна отвечать назначению регуля-
тора мощности:
1)
если
от
регулятора мощности
не
требуется
бы-
стродействия,
как
например
при его
использовании
для
оптими-
зации распределения нагрузок между агрегатами,
то
можно вво-
дить сигнал через медленно действующий механизм
— МУТ;
2)
если
же от
регулятора мощности требуется высокое быстродей-
ствие,
как
например
для его
активного вмешательства
в
аварий-
ных ситуациях,
то
необходимо применять регуляторы
с
малоинер-
ционными элементами
и в
гидравлические системы вводить
его
через быстродействующий
ЭГП. С
целью повышения быстродей-
ствия системы регулирования
в
цепь звеньев регулятора мощности
могут вводиться различные устройства, ускоряющие движение
главного сервомотора.
В
частности, таким устройством может
служить изодром
и
дифференциатор.
§
12.4.
ВРЕМЕННОЕ ВВЕДЕНИЕ ИМПУЛЬСА
ПО НАГРУЗКЕ
В современных паровых
и
газовых турбинах имеются,
как правило, значительные внутренние емкости.
В
таких системах
регулирования
с
большими внутренними аккумуляторами энер-
гии целесообразно использовать дополнительный импульс
по
200
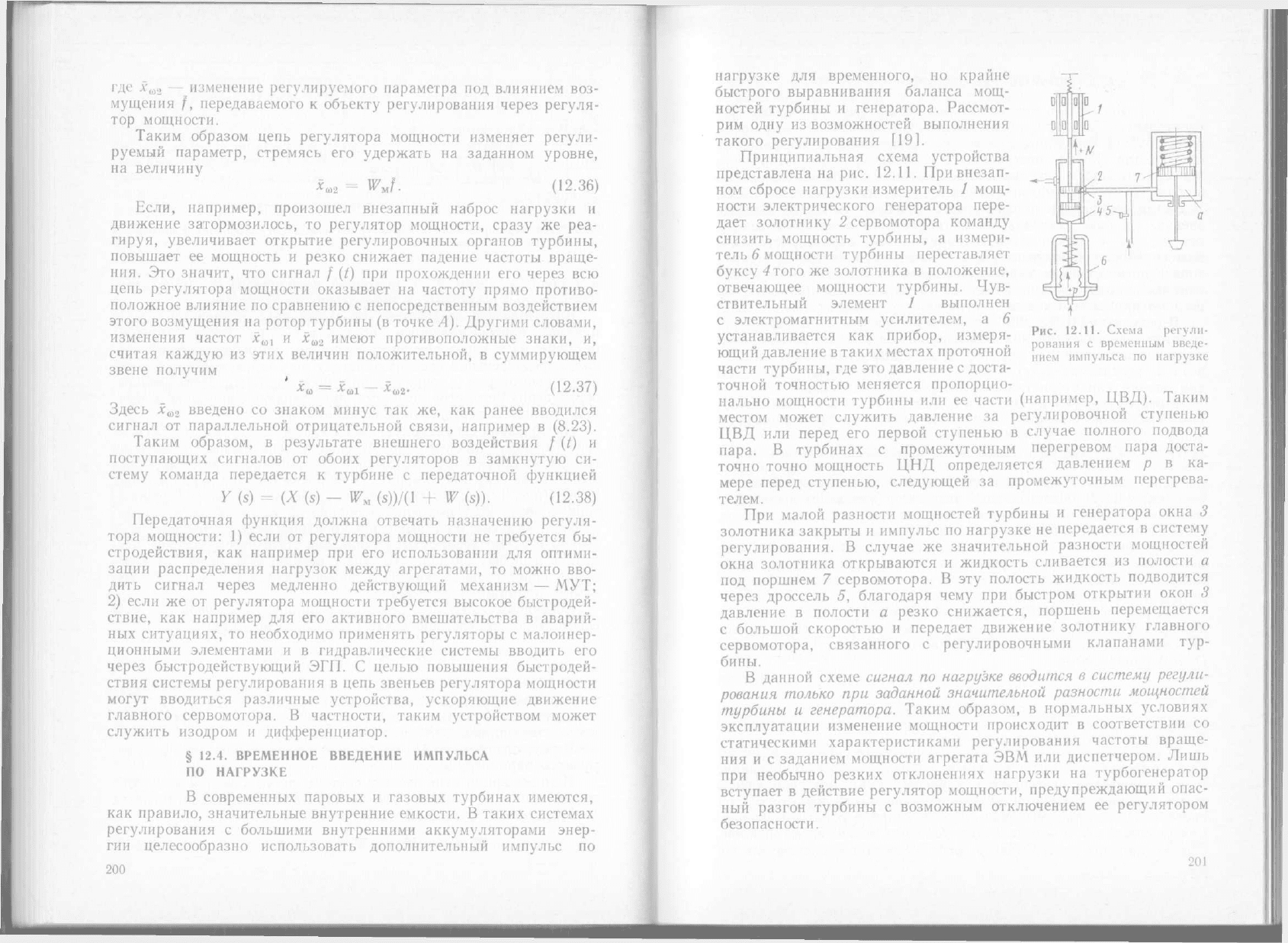
регули-
Рис.
12.11.
Схема
ронапия
с
временным введе-
нием импульса
по
нагрузке
нагрузке
для
временного,
но
крайне
быстрого выравнивания баланса мощ-
ностей турбины
и
генератора. Рассмот-
рим одну
из
возможностей выполнения
такого регулирования
[19].
Принципиальная схема устройства
представлена
на рис.
12.11.
При
внезап-
ном сбросе нагрузки измеритель
/
мощ-
ности электрического генератора пере-
дает золотнику
2
сервомотора команду
снизить мощность турбины,
а
измери-
тель
6
мощности турбины переставляет
буксу 4того
же
золотника
в
положение,
отвечающее мощности турбины. Чув-
ствительный элемент
/
выполнен
с электромагнитным усилителем,
а 6
устанавливается
как
прибор, измеря-
ющий давление
в
таких местах проточной
части турбины,
где это
давление
с
доста-
точной точностью меняется пропорцио-
нально мощности турбины
или ее
части (например,
ЦВД).
Таким
местом может служить давление
за
регулировочной ступенью
ЦВД
или
перед
его
первой ступенью
в
случае полного подвода
пара.
В
турбинах
с
промежуточным перегревом пара доста-
точно точно мощность
ЦНД
определяется давлением
р в ка-
мере перед ступенью, следующей
за
промежуточным перегрева-
телем.
При малой разности мощностей турбины
и
генератора окна
3
золотника закрыты
и
импульс
по
нагрузке
не
передается
в
систему
регулирования.
В
случае
же
значительной разности мощностей
окна золотника открываются
и
жидкость сливается
из
полости
а
под поршнем
7
сервомотора.
В эту
полость жидкость подводится
через дроссель
5,
благодаря чему
при
быстром открытии окон
3
давление
в
полости
а
резко снижается, поршень перемещается
с большой скоростью
и
передает движение золотнику главного
сервомотора, связанного
с
регулировочными клапанами тур-
бины.
В данной схеме сигнал
по
нагрузке вводится
в
систему регули-
рования только
при
заданной значительной разности мощностей
турбины
и
генератора. Таким образом,
в
нормальных условиях
эксплуатации изменение мощности происходит
в
соответствии
со
статическими характеристиками регулирования частоты враще-
ния
и с
заданием мощности агрегата
ЭВМ или
диспетчером. Лишь
при необычно резких отклонениях нагрузки
на
турбогенератор
вступает
в
действие регулятор мощности, предупреждающий опас-
ный разгон турбины
с
возможным отключением
ее
регулятором
безопасности.
201
§
12.5.
ТИПОВЫЕ РЕГУЛЯТОРЫ
Регулятор,
как
условились
(см. § 1.1),
состоит
из
чув-
ствительного элемента, воспринимающего сигналы
об
изменении
регулируемой величины,
и
системы
их
усиления
и
преобразования
в выходной сигнал, поступающий
к
главному сервомотору
или
непосредственно
к
регулировочным органам турбины. Регулятор
в целом следует рассматривать
как
эквивалентное звено
(см.
§ 8.4).
В состав регулятора входят предназначенные
для
него типовые
звенья.
На
базе различных комбинаций этих звеньев создаются
регуляторы
с
различными динамическими характеристиками.
Конструктор турбины решает задачи
по
выбору
и
настройке регуля-
тора
с
оптимальными характеристиками, обусловленными требо-
ваниями эксплуатации. Отметим основные типы регуляторов,
широко применяемых
в
энергетических установках.
П-регулятор
(ПР).
Это —
пропорциональный
ре-
гулятор, действующий
как
безынерционное звено.
Его
выходная
координата связана
с
входной уравнением
(10.50)
идеаль-
ного регулятора
х
2
(t) = kx
x
(t). Он
может служить эталоном
для оценки характеристик регуляторов других типов.
И-регулятор
(ИР).
Это
—
интегральный регулятор.
Его выходная величина определяется
по
(7.23)
уравнением
*
2
(0 = (k/T) j х
х
(t) dt.
Такое звено неустойчиво,
но оно
может
о
применяться
в
замкнутой системе
в
комбинации
с
другими звень-
ями
(см. §
11.2).
Интегральный регулятор замедляет
и
смягчает
передачу сигнала
и
делает систему астатической.
Обычно
в
состав регулятора входят помимо пропорционального
звена инерционные усилители
и
промежуточные сервомоторы,
а также корректирующие устройства, которые
следует размещать именно
в
регуляторе
— на
первой стадии уси-
ления, когда
их
энергия
еще
невелика.
ПИ-регулятор (ПИР).
Это
пропорционально-ин-
тегральный регулятор, состоящий
из
двух парал-
лельно включенных звеньев.
Его
частотная характеристика
(см.
(7.26))
равна сумме
Wrm
(/со)
= k 4- k'/Тш
(12.39)
или
Г пи
(ш) = Л'0 +
Т'ш)/ТШ, (12.40)
где
Т = Tk/k'.
В такой записи
в
результате суммирования сигналов
в
числи-
теле выделяется положительный эффект дифференцирования,
а
в
знаменателе сохраняется характеристика интегрирующего
звена
и,
значит, остается эффект неустойчивости
в
разомкнутой
системе.
При
этом замыкание системы главной обратной связью,
как указывалось,
в
определенных условиях делает
ее
устойчивой.
Однако наличие неустойчивого звена
в
замкнутой системе
все же
202
может существенно снижать
ее
качество
Г/П
и приводить
к
нежелательным колебаниям
(см.
§
11.2);
поэтому
в
системах,
где
само-
регулирование объекта регулирования
_^ ^ ^
проявляется слабо (например
в
уста-
~*~ *" *"
новках
с
турбогенераторами), П-звено
це-
лесообразно заменять А-звеном
или вво- [_^_ ^ ^_
дить дополнительную корректировку.
| 1\
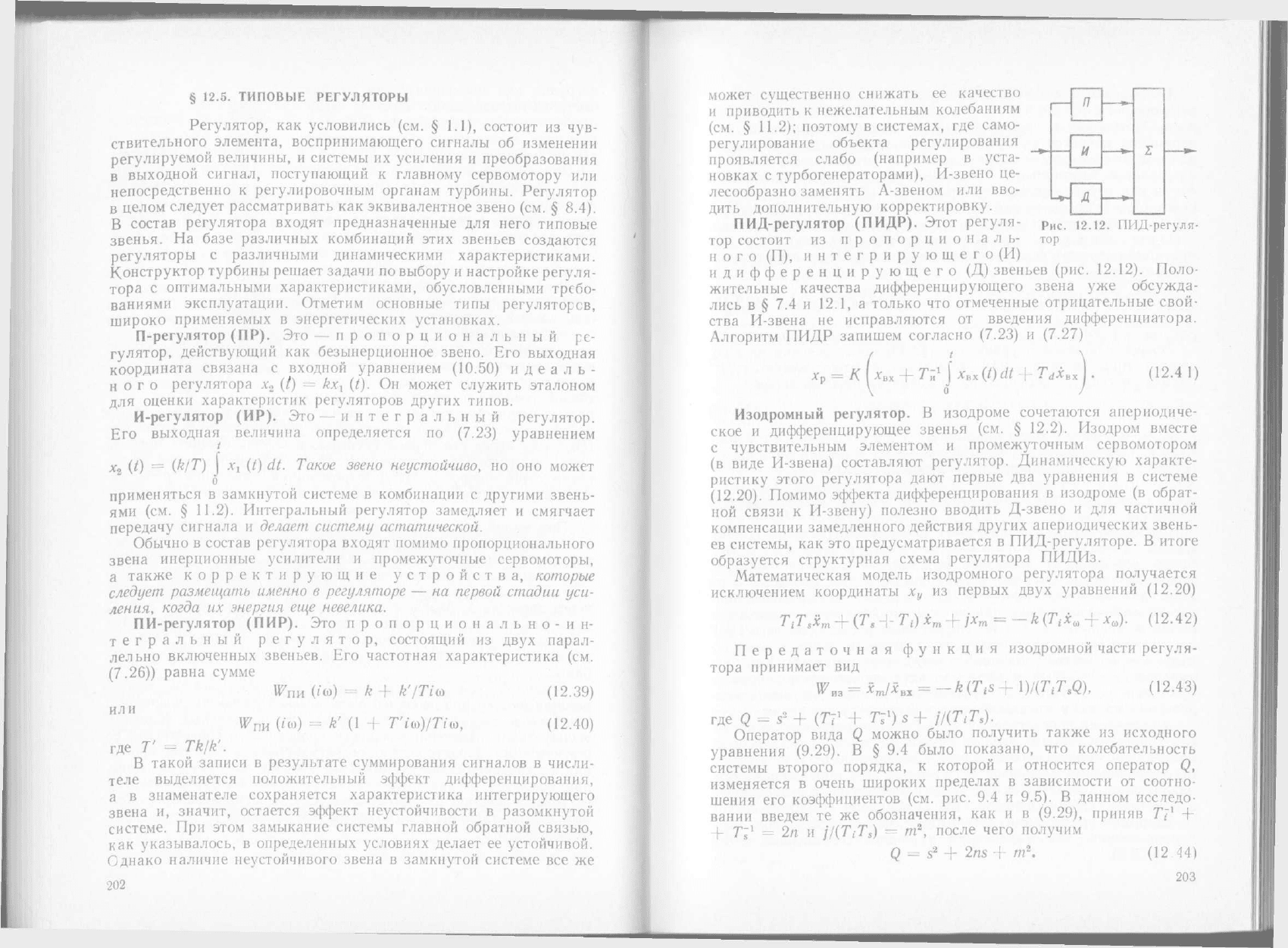
ПИД-регулятор (ПИДР). Этот регуля-
Рис
. 12.12.
ПИД-регуля-
тор состоит
из п р о п о р ц и о н а л ь- тор
н
о г о (П),
интегрирующего
(И)
идифференцирующего
(Д)
звеньев
(рис. 12.12).
Поло-
жительные качества дифференцирующего звена
уже
обсужда-
лись
в § 7.4 и 12.1, а
только
что
отмеченные отрицательные свой-
ства И-звена
не
исправляются
от
введения дифференциатора.
Алгоритм ПИДР запишем согласно
(7.23)
и
(7.27)
(12.4
1)
Изодромный регулятор.
В
изодроме сочетаются апериодиче-
ское
и
дифференцирующее звенья
(см. §
12.2).
Изодром вместе
с чувствительным элементом
и
промежуточным сервомотором
(в виде И-звена) составляют регулятор. Динамическую характе-
ристику этого регулятора дают первые
два
уравнения
в
системе
(12.20).
Помимо эффекта дифференцирования
в
изодроме
(в
обрат-
ной связи
к
И-звену) полезно вводить Д-звено
и для
частичной
компенсации замедленного действия других апериодических звень-
ев системы,
как
это
предусматривается
в
ПИД-регуляторе.
В
итоге
образуется структурная схема регулятора ПИДИз.
Математическая модель изодромного регулятора получается
исключением координаты
х
у
из
первых двух уравнений
(12.20)
TtTfm
+ (Т,
Н-
Ti) x
m
+ jx
m
= —k (T
t
x
a
-f x
u
).
(12.42)
Передаточная функция изодромной части регуля-
тора принимает
вид
W
m
=
xJ2„
= -k(T
t
s +
l)/(T
t
T.Q), (12.43)
где
Q = s
2
+ (7Г +
7V)
s +
f/(T
t
T
s
).
Оператор вида
Q
можно было получить также
из
исходного
уравнения
(9.29).
В § 9.4
было показано,
что
колебательность
системы второго порядка,
к
которой
и
относится оператор
Q,
изменяется
в
очень широких пределах
в
зависимости
от
соотно-
шения
его
коэффициентов
(см.
рис.
9.4 и 9.5). В
данном исследо-
вании введем
те же
обозначения,
как и в
(9.29),
приняв
TV +
+
Т;
1
= 2п и
j/(TiT
s
)
= m
2
,
после чего получим
Q
= s
2
+ 2ns + m
2
. (12
44)
203
Рассмотрим выходную величину
.v
p
= х
т
из
регулятора
как
реакцию
на
ступенчатое единичное воздейст-
вие.
Поскольку
в
уравнении
(12.43)
имеем
два
слагаемых,
со-
держащих оператор
Q,
предварительно решим задачу раздельно
для каждого
из
них,
не
переписывая константы. Воздействию
1
(t)
на процесс соответствует умножение
на s-
1
в
изображениях.
А
так
как
первое слагаемое
в
уравнении
(12.43)
содержит произ-
ведение
sQ-
1
, то в
нем
после деления
на s
остается лишь опера-
тор
Q-
1
,
для
которого
и
следует прежде всего отыскать оригинал.
Оригинал
к
изображению
Q-
1
находится эле-
ментарно посредством разложения
на
простейшие дроби
и
исполь-
зования табл.
5.1
Q'
1
= (2cot)
-1
((s
Si)"
1
- (s -
S2)"
1
)
-f*
co^e
0
"
sin
со/.
(12.45)
где
о) = у'm
2
— n
2
; s
t
—
a + i(o и s
2
a
—
ш при m > n-
Второе слагаемое
в
уравнении
(12.43)
после деления
па s со-
держит произведение
s^Q-
1
.
Оригинал
к
изображению
s^Q-
1
находится также
с
помощью разложения
на
простые дроби
(sQ)-
1
rrr
2
(I +
e«'sinco/).
(12.46)
Алгоритм выходного сигнала регуля-
тора представим суммой оригиналов
(12.45)
и
(12.46)
с
введением констант
из
уравнения
(12.43)
х
р
= х
т
=
kTT
]
T7
l
(7>-'e
a
'sincoH
m~
2
(l -j
e
a
'sinco/)). (12.47)
Мы рассмотрели случай комплексных корней уравнения
(12.44).
При
т < п
возможен апериодический процесс.
Вы-
бирая коэффициент усиления
k и
динамические постоянные,
можно получить высокие показатели качества процесса.
При
этом,
как
было доказано
в §
12.2,
изодром может обеспечить
устойчивый процесс даже
при
нулевом коэффициенте неравномер-
ности регулирования.
Тот
же
эффект
по
неравномерности
в
ПИР
достигается
за
счет применения неустойчивого звена.
В
этом
ас-
пекте преимущества изодромного регулятора очевидны.
Как
ука-
зывалось, изодромный регулятор может включать пропорциональ-
ную часть
и
сочетаться
с
дифференциатором
для
частичной ком-
пенсации влияния инерционности объекта регулирования.
Унификация регуляторов. Классификация регуляторов
по ха-
рактеристикам типовых звеньев служит научной базой
для
обос-
нования принципов проектирования независимо
от
конструктив-
ного оформления элементов регуляторов.
На
этой основе уста-
навливаются алгоритмы воздействия регуляторов
на
регулировоч-
ные органы турбины
и
проводится унификация регуляторов.
Широкая унификация регуляторов играет особую роль
при
использовании
для
управления турбиной современных
ЭВМ
(см.
§
20.3).
204
§
12.6.
ПРЯМОЕ ЦИФРОВОЕ РЕГУЛИРОВАНИЕ
ЭВМ способна непосредственно исполнять функции
одного
или
нескольких регуляторов.
К входу
в ЭВМ
через функциональные устройства
аналого-цифрового ввода поступают
от
датчиков непрерывные
сигналы. Аналоговые сигналы
х (t)
преобразуются
в
дискрет-
ные
х* (t),
приведенные
к
заданному масштабу.
В
процессе счи-
тывания аналоговых сигналов
с
периодом
Т
А
фиксируется каж-
дая входная координата
в
свои моменты времени
/ = jT
A
, j =
=
0, 1, 2, ... В
итоге
в
преобразователе
из
входной сту-
пенчатой функции
х (t)
—
х (jT
A
) при jT
A
< t <
<
(/+ 1) Т
А
формируются кодированные цифровые сигналы.
Процесс считывания приводит
к
запаздыванию
и к
изменению
амплитуды. Таким образом
во
входном аналого-цифровом пре-
образователе совершается модуляция импульсного
кода.
При выходе
из ЭВМ
протекает обратный процесс
в своем цифро-аналоговом преобразователе.
Если измеряемая величина неудобна
для
численного представ-
ления,
то
после датчика выполняется преобразование
и в
зависи-
мости
от
измерительного устройства устанавливается масштаб
входной величины.
С
учетом масштаба показания датчика должны
точно соответствовать физической величине после аналого-цифро-
вого преобразователя. Например, если термопара измеряет тем-
пературу
в
зоне
0—100 °С
и ее
аналоговое представление
—
сила
тока
5—30 мА,
то ее
цифровое выражение, исходя
из
двенадцати
байт двоичного числа, равно
0—4096,
а
цифровое отображение
после масштабирования имеет
вид х
ц
=
0-^-100.
Таким образом
цифровое отображение выбором масштаба приводится
к
значе-
нию измеряемой величины
и
согласуется
с
возможностями
ЭВМ.
Измеряемая величина
в
виде дискретной функции
х* (t)
срав-
нивается
в
устройстве считывания
с
заданной величиной x
uln
,
отражающей цель управления.
Математическая модель. Рассмотрим простейшую модель зам-
кнутой системы цифрового регулирования, состоящую
из
аперио-
дического звена, моделирующего турбину,
и
ЭВМ,
выполняющей
командные функции регулятора.
К
апериодическому звену
по-
ступают
и из
него передаются аналоговые сигналы.
В
ЭВМ
во
входном преобразователе аналоговые сигналы превращаются
в дискретные,
а в
выходном преобразователе происходит обратный
процесс перехода дискретных сигналов
в
аналоговые
с
необходи-
мым усилением. Протекающие
в
ЭВМ
преобразования оказывают
влияние
на
процесс регулирования.
Не
касаясь
уже
изученных
во-
просов усиления сигналов, здесь рассмотрим процесс своеобраз-
ного запаздывания, связанного
с
переходами
в
преобразователях
от одного типа сигналов
к
другому
с
периодом дискретного сиг-
нала
Т
А
.
205
Математические дискретные процессы описываются разност
ными уравнениями.
В
качестве примера запишем алгоритм
ПИД
регулятора
в
дискретной форме
для пго
интервала
К
Хвх
п \ Т
п
Т
А
х
вх
и -(- Т{Г
А
(хвх п —
х
еХ
п—i) (12.48)
где
п = О, 1,
2,...;
производная
х
вхп
=
[х
вхп
— xl
xn
\)IT
A
;
Т
2
—
время дифференциатора.
С уменьшением
Т
А
дискретный процесс приближается
к не
прерывному. Величина
Т
А
выбирается
в
зависимости
от
требуемой
точности; обычно
она не
превышает
10 % от
времени,
за
которое
скачкообразное возмущение проходит сквозь
всю
замкнутую
си
стему.
Дискретный процесс можно представить
в
виде ступенчатой
функции
и с ее
помощью оценить отставания сигнала
при
прохож
дении
его
сквозь преобразователи.
Ступенчатая функция. Рассмотрим последовательность комп
лексных чисел
h
n
(п = 0, 1, 2, ...).
Ступенчатой функцией, порож
денной последовательностью
\h
n
\,
назовем функцию
/ (г) на (0,
+
оо),
определяемую равенствами
/ (/) = h
n
при п — 0, 1, 2, ...
Для этой функции запишем интеграл, представляющий собой пре
образование Лапласа
160],
F(s)
=
]\f(t)\tr**dt
о
= 2
I
^fe
|
s—
1
<е—^
s
е<*+
1
>
!
)
л—1
ft
+
1
п—\
к=0
Из
(12.49)
получим
2 J
|/(0|e«d*
=
k=0 k
1—1
2
I
Л* |s'е*'(1
e~
s
). (12.49)
При
|V
F(s)
= s'(1 e~
s
) £
|Л
А
|е<«.
n и лк сю,
обозначив
z = e
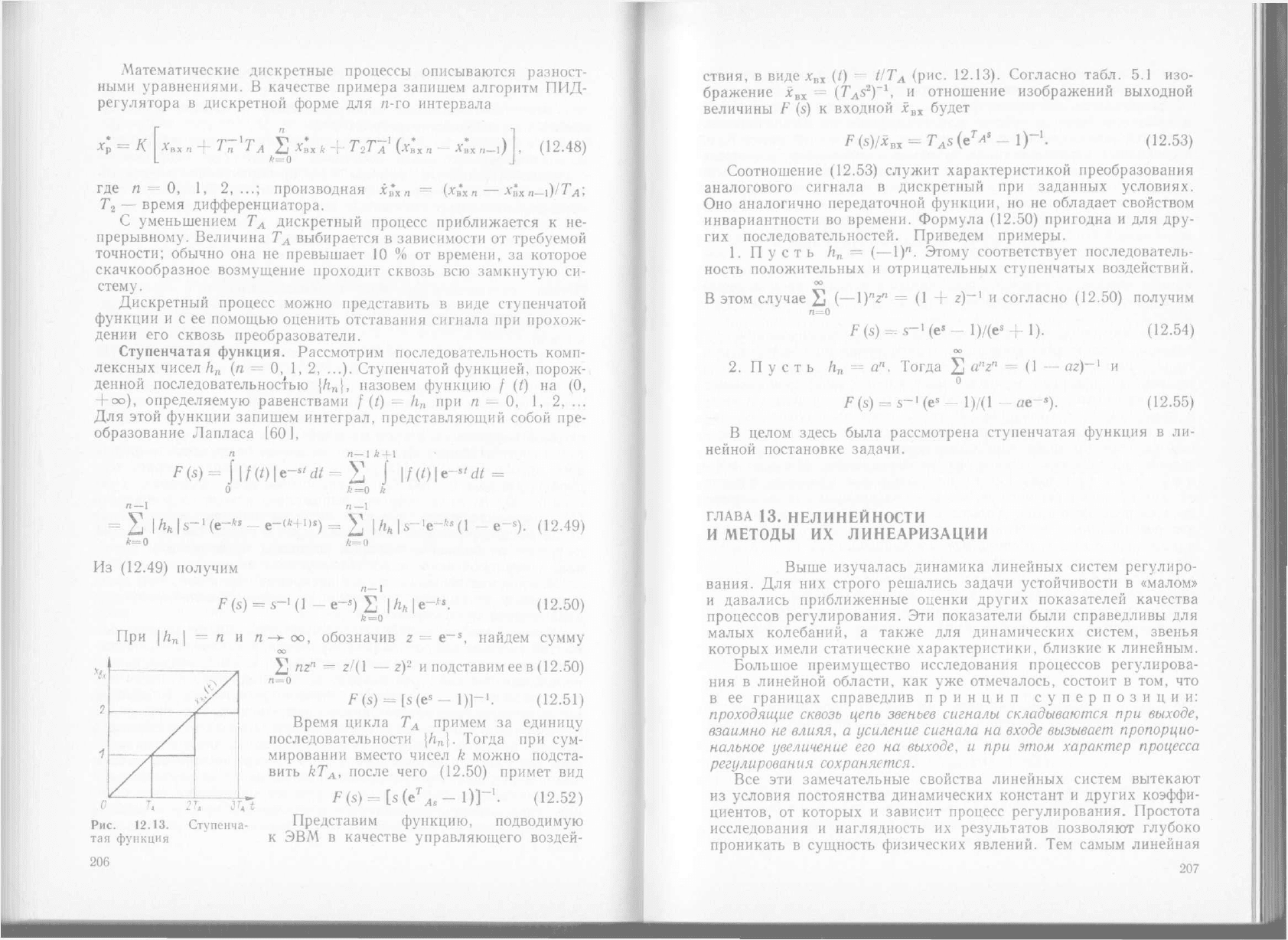
Рис.
12.13.
тая функция
206
Ступенча
(12.50)
найдем сумму
сю
2J
nz
n
= z/(l — z)
2
и
подставим
ее в
(12.50)
F(s)
= [s(e
s
1)]'.
(12.51)
Время цикла
Т
А
примем
за
единицу
последовательности
\h
n
}.
Тогда
при
сум
мировании вместо чисел
k
можно подста
вить
kT
A
,
после чего
(12.50)
примет
вид
F(s)
=
[s(e
T
As
l))
1
. (12.52)
Представим функцию, подводимую
к
ЭВМ в
качестве управляющего воздей
ствия,
в
виде
х
вх
(0 =
tlT
A
(рис. 12.13).
Согласно табл.
5.1
изо
бражение
х
вх
=
(T
A
s
2
)
1
,
и
отношение изображений выходной
величины
F (s) к
входной
х
вх
будет
F(s)/x
BX
=
T
A
s(t
T
*
s
~ I)"
1
.
(12.53)
Соотношение
(12.53)
служит характеристикой преобразования
аналогового сигнала
в
дискретный
при
заданных условиях.
Оно аналогично передаточной функции,
но не
обладает свойством
инвариантности
во
времени. Формула
(12.50)
пригодна
и для
дру
гих последовательностей. Приведем примеры.
1.
Пусть
h
n
=
(—1)".
Этому соответствует последователь
ность положительных
и
отрицательных ступенчатых воздействий.
00
В этом случае
(—l)"z"
= (1 + z)
_1
и
согласно
(12.50)
получим
F(s)s
1
(e
s
~ l)/(e
s
+ l).
(12.54)
оо
2.
П у с т ь h
n
а
п
,
Тогда
£
а
"
гП
= (1 — az)
1
и
о
F(s)
= s'(e
s
1)/(1
ae
s
). (12.55)
В целом здесь была рассмотрена ступенчатая функция
в ли
нейной постановке задачи.
ГЛАВА
13.
НЕЛИНЕЙНОСТИ
И МЕТОДЫ
ИХ
ЛИНЕАРИЗАЦИИ
Выше изучалась динамика линейных систем регулиро
вания.
Для них
строго решались задачи устойчивости
в
«малом»
и давались приближенные оценки других показателей качества
процессов регулирования.
Эти
показатели были справедливы
для
малых колебаний,
а
также
для
динамических систем, звенья
которых имели статические характеристики, близкие
к
линейным.
Большое преимущество исследования процессов регулирова
ния
в
линейной области,
как уже
отмечалось, состоит
в том, что
в
ее
границах справедлив принцип суперпозиции:
проходящие сквозь цепь звеньев сигналы складываются
при
выходе,
взаимно
не
влияя,
а
усиление сигнала
на
входе вызывает пропорцио
нальное увеличение
его на
выходе,
и при
этом характер процесса
регулирования сохраняется.
Все
эти
замечательные свойства линейных систем вытекают
из условия постоянства динамических констант
и
других коэффи
циентов,
от
которых
и
зависит процесс регулирования. Простота
исследования
и
наглядность
их
результатов позволяют глубоко
проникать
в
сущность физических явлений.
Тем
самым линейная
207
теория регулирования служит конструктору базой
для
проектиро-
вания совершенных систем регулирования.
Вместе
с тем, все
рассмотренные ранее системы регулирования
в принципе таили
в
себе
те или
иные свойства нелинейностей.
Значительные отклонения
от
линейных зависимостей могли быть
в расходных характеристиках клапанов
и
золотников,
в
силовых
характеристиках регуляторов
и
объектов регулирования.
Это
были нелинейности непрерывного типа, поэтому
они
не препятствовали линеаризации уравнений движений
и
процес-
сов
в
исследованиях устойчивости, когда рассматривались малые
колебания
и
когда задачи решались
по
первому приближению раз-
ложения
в ряд
функций, выражающих статические
ха-
рактеристики регулирования. Такая линеаризация,
при
которой
кривая заменяется прямой
с
постоянным наклоном,
не
зависящим
от входной величины, называется обычной линеариза-
цией.
Для изучения
же
переходных процессов регулирования
при
больших отклонениях координат
от
положения равновесия
и при
сильно выраженных нелишейностях
в
характеристиках звеньев
применение обычных методов линеаризации дифференциальных
уравнений может приводить
к
существенным неточностям
и
даже
к принципиальным ошибкам.
В
таких случаях необходимы осо-
бые методы исследования процессов регулирования.
В еще
боль-
шей степени
это
требование обосновано, если
в
характеристиках
звеньев нарушается условие
их
неразрывности. Нелиней-
ности разрывного типа возникают, например,
в
связи
с сухим трением
в
регуляторе, зазорами
в
шарнирах
и
применением
звеньев релейного типа. Характер нелинейных процессов,
в
отли-
чие
от
линейных, зависит
от
величины начального отклонения
параметра,
а
иногда
и от
частоты возмущения
при
входе
в
звено.
Для
них не
применим принцип суперпозиции.
Нелинейными будем называть
все
процессы регулиро-
вания, которые выходят
за
пределы линейной области.
Принципиальные свойства нелинейного звена определяются
его характеристикой, выраженной, например, уравнением
Tpx
VKX
= F(x) (13.1)
или
(Тр
Л 1)
х
вых
= F (х), (13.2)
где
F (х) —
характеристика реле
или
другого нелинейного звена.
При нелинейном введении производной характеристика звена
может быть выражена
и в
такой форме:
(Тр
+ 1)
х
яих
= F (х, рх). (13.3)
Уравнение нелинейного звена может иметь весьма разнообраз-
ный
вид, а
нелинейная функция может относиться
как к
выходной,
так
и к
входной величинам.
В
настоящее время развиты различные
методы исследования нелинейных автоматических систем. Среди
208
них
для
решения наших задач особый интерес представляют
ме-
тоды, основанные
на
идее гармонической линеари-
зации нелинейностей.
Это
направление значительно
расширяет область использования линейного анализа систем
регулирования,
и ему
будет уделено главное внимание.
В
конце
главы будут рассмотрены также решения некоторых важных
не-
линейных задач, поставленных
в
связи
с
проблемами регулирова-
ния энергетических установок.
§
13.1.
ПЕРЕМЕННЫЕ КОЭФФИЦИЕНТЫ
В ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЯХ
Во всем диапазоне регулирования частоты вращения
турбин
— от
холостого хода
до
максимальной мощности
—
ста-
тические характеристики звеньев динамической системы могут
существенно отклоняться
от
линейных.
При
этом
они
могут изме-
няться плавно
или
иметь точки разрыва непрерывности.
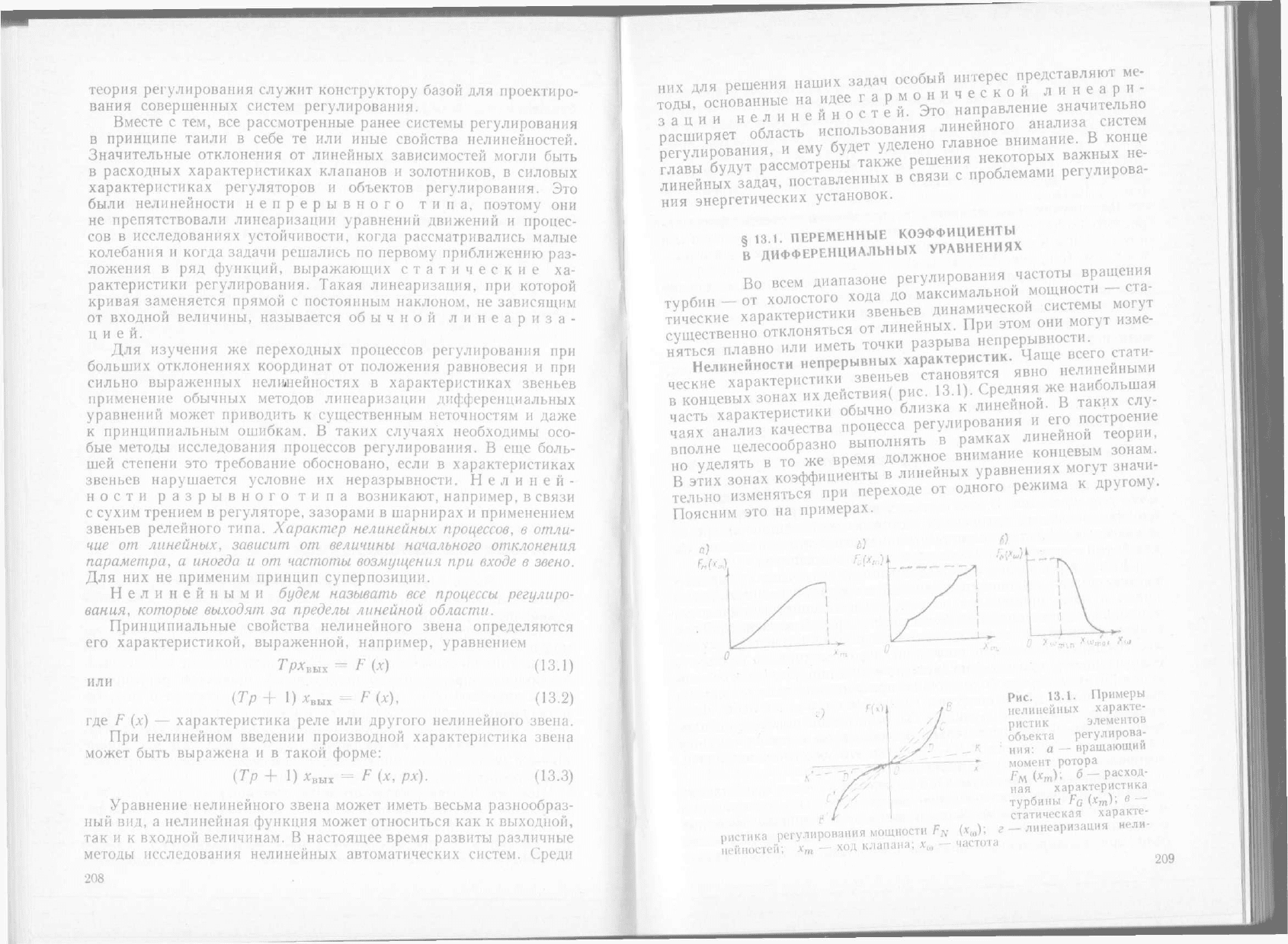
Нелинейности непрерывных характеристик. Чаще всего стати-
ческие характеристики звеньев становятся явно нелинейными
в концевых зонах ихдействия(
рис. 13.1).
Средняя
же
наибольшая
часть характеристики обычно близка
к
линейной.
В
таких слу-
чаях анализ качества процесса регулирования
и его
построение
вполне целесообразно выполнять
в
рамках линейной теории,
но уделять
в то же
время должное внимание концевым зонам.
В этих зонах коэффициенты
в
линейных уравнениях могут значи-
тельно изменяться
при
переходе
от
одного режима
к
другому.
Поясним
это на
примерах.
а)
*»
Й
ристик
ценное
а регулирования мощности
F
N
(х
ы
)\
гей;
х
т
— ход
клапана;
х
и1
—
частота
Рис.
13.1.
Примеры
нелинейных характе-
ристик элементов
объекта регулирова-
ния:
а —
вращающий
момент ротора
f
M
(*т); б —
расход-
ная характеристика
турбины
F
G
(х
т
)\ в —
статическая характе-
г —
линеаризация нели-
209
Коэффициенты усиления систем регулирования
турбин, работающих
на
общую электрическую сеть, значительно
изменяются
в
зависимости
от
режима работы.
Для
турбогенера-
торов особенно важна стабильность работы
на
холостом ходу,
когда производится синхронизация перед включением
их в
электрическую сеть.
А как раз в
этой зоне регулирования
наиболее трудно достигнуть апериодической устойчивости
(см.
§ 10.1).
Для улучшения динамических показателей системы вблизи
хо-
лостого хода приходится значительно повышать местный
коэффициент неравномерности регулиро-
вания
(см. рис. 3.22, 13.1, в).
Сопловое регулирование
в
паровых турбинах также вносит
нелинейности
в
статические характеристики: открытие каждого
клапана сопровождается искривлением расходной характеристики
турбины; перекрышей
в
последовательном открытии клапанов
хотя
и
удается сгладить резкие переходы
на
характеристике,
но
все
же
сохраняются существенные местные нелинейности
(см.
рис.
13.1, б).
Аналогичные нелинейности встречаются
в
системах регулиро-
вания
и
других регулируемых параметров: давления
в
местах
отбора пара
из
турбины, температуры газа
за
камерой сгорания
и
т. п.
Таким образом, локальные коэффициенты неравномерности вдоль
одной
и той же
статической характеристики регулирования
мо-
гут значительно изменяться, сильно влияя
на все
показатели про-
цесса регулирования.
В
этих случаях
в
состав структурной схемы
входят звенья,
в
уравнениях которых постепенно
или
резко
меняются коэффициенты усиления
в
зависимости
от
амплитуды
колебаний
—
верный признак нелинейности процессов.
Линеаризация криволинейных статических характе-
ристик обычно выполняется заменой
их
прямой линией. Такой
прием
и
нами применялся
во
всех исследованиях устойчивости
в рамках малых колебаний
(см. гл. 10 и др.). В
этой постановке
задачи нелинейная характеристика
на рис. 13.1, г
изображается
касательной
К'К в
начале координат. Такой метод мало подходит,
если изучается процесс регулирования
при
значительных ампли-
тудах.
В
этом случае более точное приближение дала
бы
замена
действительной характеристики средней секущей С
С. Еще
лучшее приближение получилось
бы,
если
в
зависимости
от
ампли-
туды колебаний последовательно вводились
бы в
расчет секущие
из
их
пучка
в
пределах
В'В — D'D, но это уже
сложная задача,
которая будет рассмотрена ниже.
Динамические константы.
Они во
многих случаях существенно
меняются
в
зависимости
от
координат системы регулирования
и амплитуды колебаний.
Так,
например,
в
паровых турбинах
с сопловым регулированием
в
зоне открытия каждого клапана
(или
при
одновременном подъеме сдвоенных клапанов) вместе
210
с изменением статической характеристики
(рис.
13.1,6)
меняется
и
динамическая посто-
янная ротора
Т
т
(см. § 10.1). Во
всех систе-
мах регулирования сервомотор
в
режиме
ма-
лых колебаний может действовать
как
аперио-
дическое звено,
а при
повышенных амплитудах
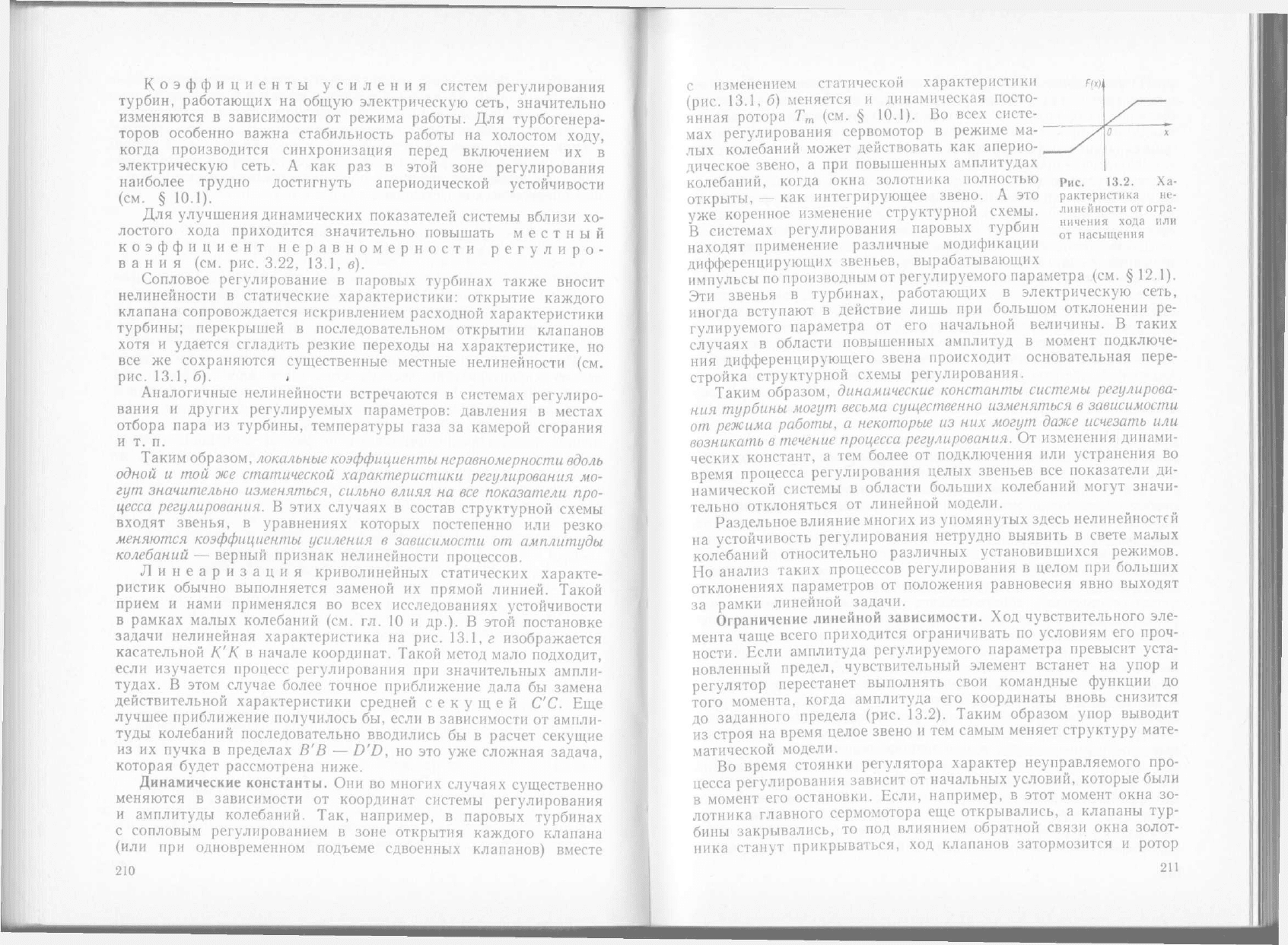
колебаний, когда окна золотника полностью
Рис
. 13.2. Ха-
открыты,
— как
интегрирующее звено.
А это
рактеристика
не-
уже коренное изменение структурной схемы. линейности
от
огра-
В системах регулирования паровых турбин
""^сыщё^ия
"™
находят применение различные модификации
дифференцирующих звеньев, вырабатывающих
импульсы
по
производным
от
регулируемого параметра
(см.
§12.1).
Эти звенья
в
турбинах, работающих
в
электрическую сеть,
иногда вступают
в
действие лишь
при
большом отклонении
ре-
гулируемого параметра
от его
начальной величины.
В
таких
случаях
в
области повышенных амплитуд
в
момент подключе-
ния дифференцирующего звена происходит основательная пере-
стройка структурной схемы регулирования.
Таким образом, динамические константы системы регулирова-
ния турбины могут весьма существенно изменяться
в
зависимости
от режима работы,
а
некоторые
из них
могут даже исчезать
или
возникать
в
течение процесса регулирования.
От
изменения динами-
ческих констант,
а тем
более
от
подключения
или
устранения
во
время процесса регулирования целых звеньев
все
показатели
ди-
намической системы
в
области больших колебаний могут значи-
тельно отклоняться
от
линейной модели.
Раздельное влияние многих
из
упомянутых здесь нелинейностей
на устойчивость регулирования нетрудно выявить
в
свете малых
колебаний относительно различных установившихся режимов.
Но анализ таких процессов регулирования
в
целом
при
больших
отклонениях параметров
от
положения равновесия явно выходят
за рамки линейной задачи.
Ограничение линейной зависимости.
Ход
чувствительного эле-
мента чаще всего приходится ограничивать
по
условиям
его
проч-
ности. Если амплитуда регулируемого параметра превысит уста-
новленный предел, чувствительный элемент встанет
на
упор
и
регулятор перестанет выполнять свои командные функции
до
того момента, когда амплитуда
его
координаты вновь снизится
до заданного предела
(рис. 13.2).
Таким образом упор выводит
из строя
на
время целое звено
и тем
самым меняет структуру мате-
матической модели.
Во время стоянки регулятора характер неуправляемого про-
цесса регулирования зависит
от
начальных условий, которые были
в момент
его
остановки. Если, например,
в
этот момент окна
зо-
лотника главного сермомотора
еще
открывались,
а
клапаны тур-
бины закрывались,
то под
влиянием обратной связи окна золот-
ника станут прикрываться,
ход
клапанов затормозится
и
ротор
211
разгонит сильнее,
чем при
действующем регуляторе. Если
же
еще
до
момента встречи регулятора
с
упором окна золотника
уже
были полностью открыты,
то
упор, возможно,
и
вовсе
не
оказал
бы
влияния
на
процесс регулирования. Аналогичные явления наблю-
даются, если встает
на
упор золотник.
И в
этом случае характер
последующего процесса регулирования может сильно меняться
в зависимости
от
начальных условий.
А это —
одни
из
характер-
ных признаков нелинейности процесса.
В
процессах регулирова-
ния
в
области больших амплитуд ограничители хода звеньев
мо-
гут существенно менять динамические свойства системы.
Такую
же
статическую характеристику,
как для
звена
с
огра-
ничением хода, имеет звено насыщения
(рис. 13.2).
Уточнение расчетов нелинейных процессов регулирования.
Отмеченные выше нелинейности статических характеристик
и
ограничения движения звеньев могут сильно проявляться
при
экстремальных внешних воздействиях
на
систему регулирования.
Для турбин
это
возмущение имеет особое значение,
так как их
надежность
в
большой мере зависит
от
величины первого размаха
колебаний частоты вращения после полного сброса нагрузки.
Сохранять
же
максимальное быстродействие регулирования чрез-
вычайно важно
при
всех режимах параллельной работы агрега-
тов
в
современных энергосистемах. Имея
в
виду
эти
особые усло-
вия эксплуатации, следует тщательно проверять влияние допус-
каемых нелинейностей
на
процесс регулирования
при
больших
амплитудах колебаний частоты вращения.
Для этой цели можно использовать линейные методы расчета,
разбив процесс
во
времени
на
части
по
точкам излома статических
характеристик
и
определить
в
начале каждого участка свои
на-
чальные условия.
При
этом необходимо
так же
выделить
в
про-
цессе
все
места ограничений ходов элементов звеньев (регулятора,
золотников, клапанов), установить моменты полного открытия
окон золотников
и
изменения направления движения сервомоторов,
учесть отключение действовавших
или
включение новых кор-
ректирующих звеньев.
Для той же
цели более точен
и
универсален
приближенный расчет методом численного интег-
рирования. Этот метод основан
на
построении процесса
по линейным
или
даже
по
нелинейным уравнениям
в
пределах
кратких отрезков времени, причем
в
конце каждого- промежутка
определяются начальные условия
для
последующего промежутка
времени,
что
особенно важно
при
резко выраженных нелинейно-
стях
(см. § 17.6).
Этими методами расчета решаются многие част-
ные инженерные задачи,
и ими
широко пользуются
на
практике
для получения надежных количественных результатов.
Но
такие
расчеты
не
заменяют теоретические исследования,
так как
част-
ные решения задач
не
приводят
к
широким обобщениям
в
виде
показателей качества нелинейных систем регулирования.
Научная основа
для
понимания нелинейных процессов
и ка-
чественной
их
оценки создавалась
на
базе особых методов исследо-
212
вания применительно
к
различным видам нелинейностей. Ниже
отмечены наиболее важные
из
этих методов
для
решения общих
проблем регулирования турбины.
§
13.2.
ТРЕНИЕ
И
ЛЮФТЫ
В
ЭЛЕМЕНТАХ РЕГУЛЯТОРА
Трение
в
элементах современного регулятора
(с
малыми
массами чувствительного элемента)
в
системах регулирования
энергетических установок,
как
правило, ухудшает качество про-
цесса.
Это —
вредная нелинейность, которую,
за
редкими исклю-
чениями, надо сводить
к
минимуму. Именно
лля
этого необходимо
ясно себе представлять,
к
каким последствиям
и при
каких обстоя-
тельствах приводит трение
в
различных элементах регуля-
тора.
Аналогичный
и, как
правило, также вредный эффект порож-
дают люфты
в
механических передачах системы регулирования.
Этот дефект всегда затрагивал интересы эксплуатации
в
связи
с износом шарнирных механизмов.
Нелинейности типа сухого трения.
В
области малых колебаний
сила трения
в
чувствительном элементе регулятора была учтена
в математической модели
как
пропорциональная производной
от
его координаты
по
времени
(см. § 10.3).
Применив линейную мате-
матическую модель
и
метод энергетического баланса, можно было
приближенно решить задачу устойчивости регулятора
с
массами
при сухом трении. Такое решение подчеркивало широкие возмож-
ности распространения глубоко изученного линейного анализа
в нелинейную область. Более корректно
и с
лучшими показате-
лями качества задача
о
влиянии сухого трения
на
процесс регули-
рования была решена
в ее
непосредственном нелинейном виде
Р.
Мизесом,
К-
Рерихом,
Е.
Николой:
с
расчетом свободного дви-
жения ротора
и
времени стоянки
при
каждом изменении направ-
ления движения
и с
определением новых начальных условий
в момент трогания
с
места.
Современная теория автоматического регулирования
и ее
практическое приложение
в
турбостроении достигли настолько
высокого уровня,
что
крупные недостатки ряда нелинейных эле-
ментов
в
системах регулирования были правильно оценены
и та-
кие элементы были заменены более совершенными.
В
частности,
сейчас
уже, как
правило,
не
применяются центробежные маят-
ники
с
большими массами грузов
и
муфты, требующие немалого
трения
для
устойчивости процесса.
Их
место занял упругий бес-
шарнирный элемент, который
по
праву вошел
в
математическую
модель
в
качестве безынерционного звена
(см. § 10.3).
Однако
вопрос
о
влиянии
на
процесс регулирования сухого трения,
вы-
зывающего нечувствительность безынерционного регулятора,
по-
прежнему остается актуальным.
Эта
задача решается методом
построения процесса
для
двух последовательных линейных
мо-
делей:
при
действующем
и при
выключенном чувствительном
эле-
213
менте.
В
обеих моделях сохраняется обычная линейная система
дифференциальных уравнений,
но
после каждой остановки регу-
лятора определяются новые начальные условия
для
следующего
размаха колебания регулируемого параметра.
При
этом выяс-
няются общие закономерности возникновения автоколеба-
ний,
их
частоты
и
возможные амплитуды.
Нелинейности такого
же
типа могут исходить
не
только
от
самого чувствительного элемента,
но и от
связанных
с ним
эле-
ментов усилителей
и
сервомоторов. Силы, действующие
на эти
элементы (золотники
и пр.),
надо, конечно, сводить
к
тому мини-
муму,
при
котором
ими
можно пренебрегать. Этого конструктор
может достигнуть, применяя многократное усиление
и
другие
технические средства
(см. гл. 2). Но
если
все же
силы трения
не
становятся «малыми»
по
сравнению
с
регулирующей силой чув-
ствительного элемента,
то их
влияние
на
процесс следует оценивать
хотя
бы
указанными выше приближенными методами. Решая
от-
меченные здесь задачи, надо обращать внимание
на тип
обратной
связи. Если выбран силовой выключатель золотника
(см. рис. 2.3),
то трение
в
золотнике оказывает
на
процесс регулирования точно
такое
же
влияние,
как и в
чувствительном элементе. Если
же об-
ратную связь золотник имеет непосредственно
с
поршнем серво-
мотора,
то
последний, опираясь через рычаг
на
золотник, оказы-
вает заметное давление
на
чувствительный элемент, мешая
ему
выполнять свои функции. Исследование такой модели
— это
дру-
гая нелинейная задача, также
уже
решенная.
Люфты
в
шарнирах.
В
момент изменения направления движе-
ния зазор
в
шарнирах
на
короткое время прерывает сигнал,
по-
даваемый звеном
или
подводимый
к
нему.
Тем
самым люфт всегда
повышает коэффициент нечувствительности регулирования,
что
само
по
себе
— уже
значительный дефект, если люфт
не
предназна-
чен
для
особой цели.
Если регулятор можно считать безынерционным,
то его
оста-
новки из-за люфта оказывают такое
же
влияние
на
процесс регу-
лирования,
как
сухое трение. Если
же
масса, приведенная
к ко-
ординате чувствительного элемента, играет
в
процессе существен-
ную роль,
то
влияние люфта
и
сухого трения принципиально раз-
личается,
так как
лишь трение оказывает демпфирующее воздей-
ствие
на
колебание масс, диссипируя
их
энергию
(см. § 11.4).
Не останавливаясь
на
воздействии люфта
в
других звеньях,
сделаем общее заключение:
люфты нарушают выбранную
без их
учета математическую модель системы регулирования
как
опти-
мальную,
и их
появление ухудшает чувствительность системы
и процесс регулирования.
При
проектировании передаточных меха-
низмов конструктор должен предусматривать силовое
за-
мыкание, исключающее образование
в
шарнирных
со-
единениях люфтов, если
они не
предусмотрены
с
особой
целью.
214
§
13.3.
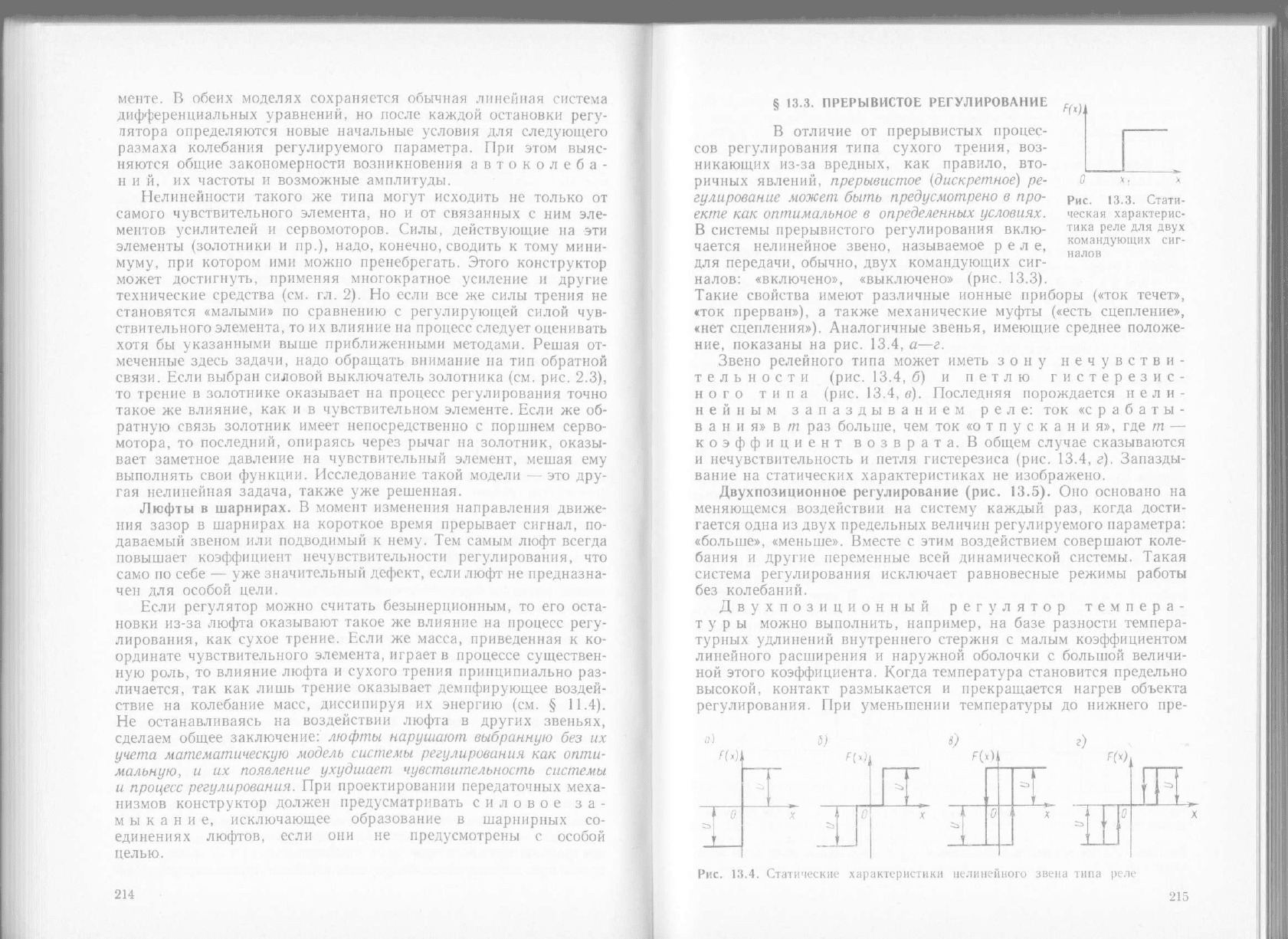
ПРЕРЫВИСТОЕ РЕГУЛИРОВАНИЕ
В отличие
от
прерывистых процес-
сов регулирования типа сухого трения, воз-
никающих из-за вредных,
как
правило, вто-
ричных явлений,
прерывистое (дискретное)
ре-
гулирование может быть предусмотрено
в
про-
екте
как
оптимальное
в
определенных условиях.
В системы прерывистого регулирования вклю-
чается нелинейное звено, называемое реле,
для передачи, обычно, двух командующих сиг-
налов: «включено», «выключено»
(рис. 13.3).
Такие свойства имеют различные ионные приборы («ток течет»,
«ток прерван»),
а
также механические муфты («есть сцепление»,
«нет сцепления»). Аналогичные звенья, имеющие среднее положе-
ние,
показаны
на рис. 13.4, а—г.
Звено релейного типа может иметь зону нечувстви-
тельности
(рис. 13.4, б) и
петлю гистерезис-
ного типа
(рис. 13.4, в).
Последняя порождается нели-
нейным запаздыванием реле:
ток «с р а б а т ы -
в
а н и я» в т раз
больше,
чем ток
«отпускания»,
где т —
коэффициент возврата.
В
общем случае сказываются
и нечувствительность
и
петля гистерезиса
(рис. 13.4, г).
Запазды-
вание
на
статических характеристиках
не
изображено.
Двухпозиционное регулирование
(рис.
13.5).
Оно
основано
на
меняющемся воздействии
на
систему каждый
раз,
когда дости-
гается одна
из
двух предельных величин регулируемого параметра:
«больше», «меньше». Вместе
с
этим воздействием совершают коле-
бания
и
другие переменные всей динамической системы. Такая
система регулирования исключает равновесные режимы работы
без колебаний.
Двухпозиционный регулятор темпера-
туры можно выполнить, например,
на
базе разности темпера-
турных удлинений внутреннего стержня
с
малым коэффициентом
линейного расширения
и
наружной оболочки
с
большой величи-
ной этого коэффициента. Когда температура становится предельно
высокой, контакт размыкается
и
прекращается нагрев объекта
регулирования.
При
уменьшении температуры
до
нижнего
пре-
о)
5.)
FT
1)
г)
F(»)
о)
5.)
FT
И,
•г
0 X li
С
1 •
H
X X
Рис. 13.4.
Статические характеристики нелинейного звена типа реле
215
О
х, х
Рис. 13.3.
Стати-
ческая характерис-
тика реле
для
двух
командующих сиг-
налов
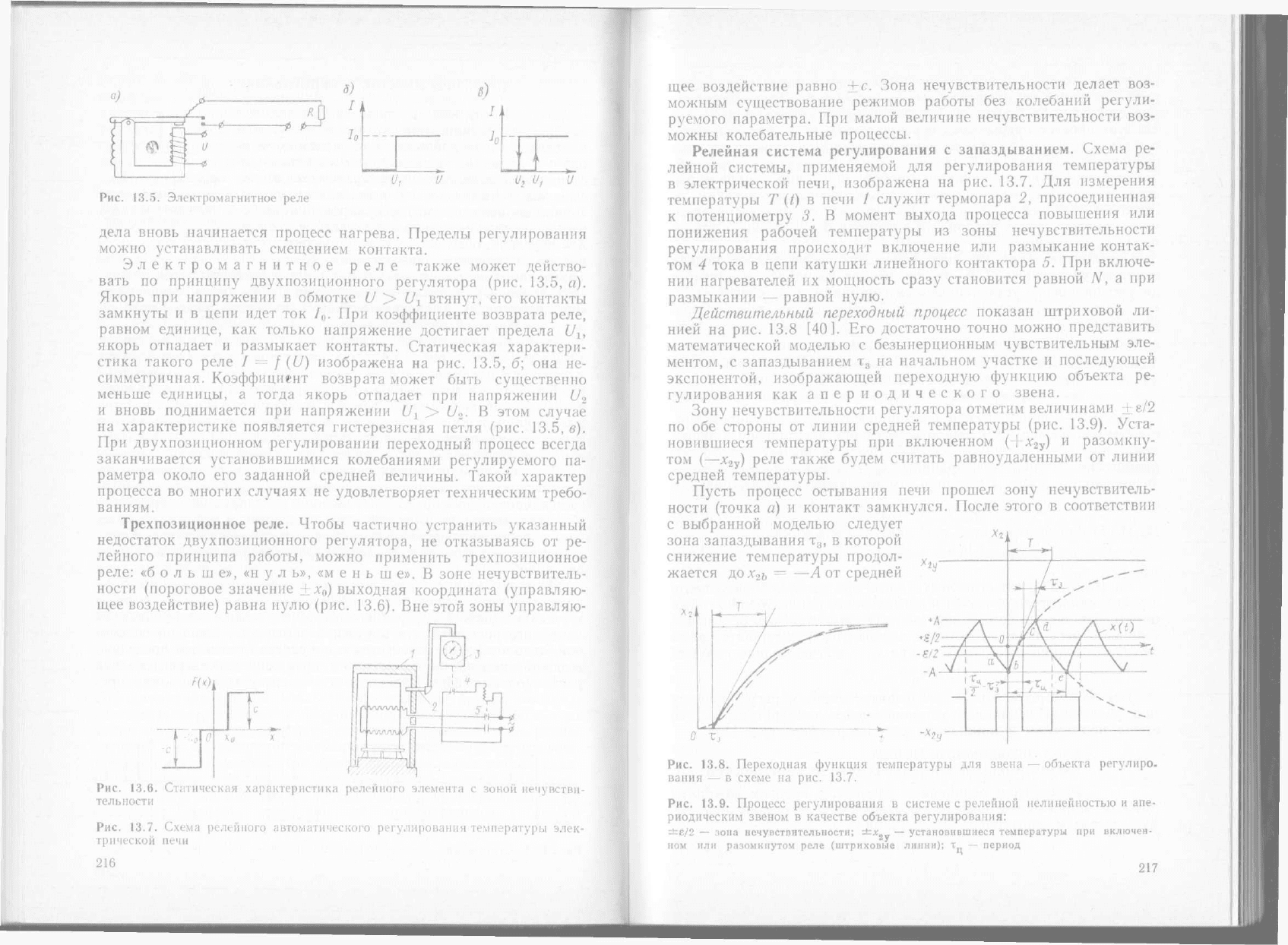
Рис.
13.5.
Электромагнитное реле
д)
I
и
2
и, и
дела вновь начинается процесс нагрева. Пределы регулирования
можно устанавливать смещением контакта.
Электромагнитное реле также может действо-
вать
по
принципу двухпозиционного регулятора
(рис. 13.5, а).
Якорь
при
напряжении
в
обмотке
U > /7j
втянут,
его
контакты
замкнуты
и в
цепи идет
ток /
()
. При
коэффициенте возврата реле,
равном единице,
как
только напряжение достигает предела
U
lt
якорь отпадает
и
размыкает контакты. Статическая характери-
стика такого реле
/ = / (U)
изображена
на рис. 13.5, б; она не-
симметричная. Коэффициент возврата может быть существенно
меньше единицы,
а
тогда якорь отпадает
при
напряжении
U~,
и вновь поднимается
при
напряжении
t7, > U
2
. В
этом случае
на характеристике появляется гистерезисная петля
(рис. 13.5, в).
При двухпозиционном регулировании переходный процесс всегда
заканчивается установившимися колебаниями регулируемого
па-
раметра около
его
заданной средней величины. Такой характер
процесса
во
многих случаях
не
удовлетворяет техническим требо-
ваниям.
Трехпозиционное реле. Чтобы частично устранить указанный
недостаток двухпозиционного регулятора,
не
отказываясь
от ре-
лейного принципа работы, можно применить трехпозиционное
реле:
«б о л ь ш е», «н у л ь», «м е н ь ш е». В
зоне нечувствитель-
ности (пороговое значение
±х
0
)
выходная координата (управляю-
щее воздействие) равна нулю
(рис. 13.6). Вне
этой зоны управляю-
F(x)
лл.
J
П,
,11,,/у
Рис.
13.6.
Статическая характеристика релейного элемента
с
зоной нечувстви-
тельности
Рис.
13.7.
Схема релейного автоматического регулирования температуры элек-
трической печи
216
щее воздействие равно
±с.
Зона нечувствительности делает воз-
можным существование режимов работы
без
колебаний регули-
руемого параметра.
При
малой величине нечувствительности воз-
можны колебательные процессы.
Релейная система регулирования
с
запаздыванием. Схема
ре-
лейной системы, применяемой
для
регулирования температуры
в электрической печи, изображена
на рис. 13.7. Для
измерения
температуры
Т (г) в
печи
/
служит термопара
2,
присоединенная
к потенциометру
3. В
момент выхода процесса повышения
или
понижения рабочей температуры
из
зоны нечувствительности
регулирования происходит включение
или
размыкание контак-
том
4
тока
в
цепи катушки линейного контактора
5. При
включе-
нии нагревателей
их
мощность сразу становится равной
N, а при
размыкании
—
равной нулю.
Действительный переходный процесс показан штриховой
ли-
нией
на рис. 13.8 [40]. Его
достаточно точно можно представить
математической моделью
с
безынерционным чувствительным эле-
ментом,
с
запаздыванием
т
3
на
начальном участке
и
последующей
экспонентой, изображающей переходную функцию объекта
ре-
гулирования
как
апериодического звена.
Зону нечувствительности регулятора отметим величинами
±е/2
по
обе
стороны
от
линии средней температуры
(рис. 13.9).
Уста-
новившиеся температуры
при
включенном (+х
2у
)
и
разомкну-
том
(—х
2у
)
реле также будем считать равноудаленными
от
линии
средней температуры.
Пусть процесс остывания печи прошел зону нечувствитель-
ности (точка
а) и
контакт замкнулся. После этого
в
соответствии
с выбранной моделью следует
зона запаздывания
т
3
, в
которой
снижение температуры продол-
жается
до х
2Ъ
— —А от
средней
Рис.
13.8.
Переходная функция температуры
для
звена
вания
— в
схеме
на рис. 13.7.
объекта регулиро.
Рис.
13.9.
Процесс регулирования
в
системе
с
релейной нелинейностью
и
апе-
риодическим звеном
в
качестве объекта регулирования:
±Е/2
—
зона нечувствительности;
—х^ —
установившиеся температуры
при
включен-
ном
или
разомкнутом реле (штриховые линии);
т
ц
—
период
217
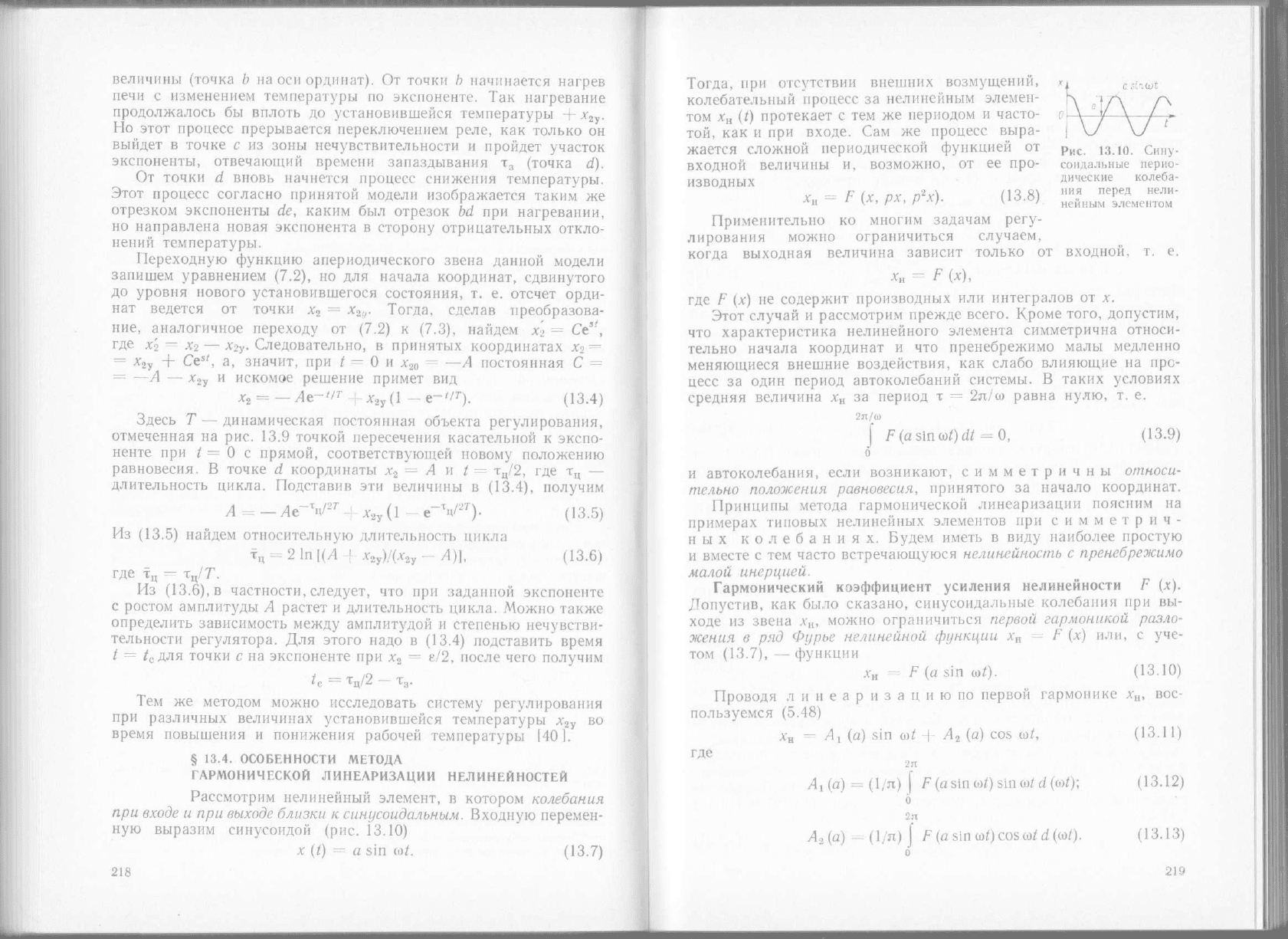
величины (точка
Ь на оси
ординат).
От
точки
Ь
начинается нагрев
печи
с
изменением температуры
по
экспоненте.
Так
нагревание
продолжалось
бы
вплоть
до
установившейся температуры
+ х
2у
.
Но этот процесс прерывается переключением реле,
как
только
он
выйдет
в
точке
с из
зоны нечувствительности
и
пройдет участок
экспоненты, отвечающий времени запаздывания
т
3
(точка
d).
От точки
d
вновь начнется процесс снижения температуры.
Этот процесс согласно принятой модели изображается таким
же
отрезком экспоненты
de,
каким
был
отрезок
bd при
нагревании,
но направлена новая экспонента
в
сторону отрицательных откло-
нений температуры.
Переходную функцию апериодического звена данной модели
запишем уравнением
(7.2), но для
начала координат, сдвинутого
до уровня нового установившегося состояния,
т. е.
отсчет орди-
нат ведется
от
точки
х
2
= х
2у
.
Тогда, сделав преобразова-
ние,
аналогичное переходу
от (7.2) к (7.3),
найдем
х
2
= Се
5
',
где
х'
2
= Х2 — х
2у
.
Следовательно,
в
принятых координатах
х
2
=
= х
2у
+ Ce
st
, а,
значит,
при t = 0 и х
20
= —А
постоянная
С =
= —А — х
2у
и
искомое решение примет
вид
*,
=
—Ле-'/
г
+дг,
у
(1-е-'/*).
(13.4)
Здесь
Т —
динамическая постоянная объекта регулирования,
отмеченная
на рис. 13.9
точкой пересечения касательной
к
экспо-
ненте
при t = 0 с
прямой, соответствующей новому положению
равновесия.
В
точке
d
координаты
х
г
= А и t = т
ц
/2, где т
ц
—
длительность цикла. Подставив
эти
величины
в (13.4),
получим
А
=
_
Afr
\pr
+
^
(l
_
e
-
V
^).
(13
.
5)
Из
(13.5)
найдем относительную длительность цикла
т
ц
=
21п[(Л
\
х
2у
)/(х
2у
--А)},
(13.6)
где
т
ц
=
Тц/Г.
Из
(13.6), в
частности, следует,
что при
заданной экспоненте
с ростом амплитуды
А
растет
и
длительность цикла. Можно также
определить зависимость между амплитудой
и
степенью нечувстви-
тельности регулятора.
Для
этого надо
в (13.4)
подставить время
t =
/
с
для точки
с на
экспоненте
при х
2
= е/2,
после чего получим
/
с
т^ц/2 т
3
.
Тем
же
методом можно исследовать систему регулирования
при различных величинах установившейся температуры
х
2у
во
время повышения
и
понижения рабочей температуры
[40].
§
13.4.
ОСОБЕННОСТИ МЕТОДА
ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ НЕЛ ИНЕЙНОСТЕЙ
Рассмотрим нелинейный элемент,
в
котором колебания
при входе
и при
выходе близки
к
синусоидальным. Входную перемен-
ную выразим синусоидой
(рис. 13.10)
х
(t) = a sin со/. (13.7)
218
Л
17
\
0
/
\
/ \ /
Тогда,
при
отсутствии внешних возмущений,
колебательный процесс
за
нелинейным элемен-
том
х
н
(/)
протекает
с тем же
периодом
и
часто-
той,
как и при
входе.
Сам же
процесс выра-
жается сложной периодической функцией
от
Рис 13л0
_
Сину-
входной величины и, возможно, от ее про-
соидальные перио-
ИЗВОДНЫХ дические колеба-
х
= F (х ох о
2
х) (13 8)
ния
перед нели
"
Х
н
г {X, рх, р X). о;
нейным
элементом
Применительно
ко
многим задачам регу-
лирования можно ограничиться случаем,
когда выходная величина зависит только
от
входной,
т. е.
*н
= F (х),
где
F (х) не
содержит производных
или
интегралов
от х.
Этот случай
и
рассмотрим прежде всего. Кроме того, допустим,
что характеристика нелинейного элемента симметрична относи-
тельно начала координат
и что
пренебрежимо малы медленно
меняющиеся внешние воздействия,
как
слабо влияющие
на
про-
цесс
за
один период автоколебаний системы.
В
таких условиях
средняя величина
х
н
за
период
т =
2я/со равна нулю,
т. е.
2л/ш
j F(asln<ot)dt = 0, (13.9)
о
и автоколебания, если возникают, симметричны относи-
тельно положения равновесия, принятого
за
начало координат.
Принципы метода гармонической линеаризации поясним
на
примерах типовых нелинейных элементов
при
симметрич-
ных колебаниях. Будем иметь
в
виду наиболее простую
и вместе
с тем
часто встречающуюся нелинейность
с
пренебрежимо
малой инерцией.
Гармонический коэффициент усиления нелинейности
F (х).
Допустив,
как
было сказано, синусоидальные колебания
при вы-
ходе
из
звена
х,„
можно ограничиться первой гармоникой разло-
жения
в ряд
Фурье нелинейной функции
х
п
— F (х) или, с
уче-
том
(13.7), —
функции
х
а
= F (a sin at). (13.10)
Проводя линеаризацию
по
первой гармонике
х
н
,
вос-
пользуемся
(5.48)
A;
H
= А
г
(a) sin со/ + А
%
(a) cos со/, (13.11)
где
2Я
А
1
(а)
=
(\/п)\
F (a sin
со/)
sin
со/
d
(со/);
(13.12)
о
2л
Л
а
(а)
= (1/я) f F (а sin
со/)
cos
со/
d (at). (13.13)
219