Кириллов И.И. Автоматическое регулирование паровых турбин и газотурбинных установок
Подождите немного. Документ загружается.

Выполним разложение
на
простейшие дроби
l/[(s —
A*)
(s — i(o)] = Af(s — A
ft
) ~| B/(s — ш).
Приведя
к
общему знаменателю правую часть
и
приравняв
числители обеих частей уравнения, найдем
(при (А + В) s = 0):
А
=
—1/(г'ы
— А,,); В --- 1 (/о) —
A
ft
). Использовав
это
разложе-
ние,
получим
*вых
= Д Г
к
[(S
-
гю)"
1
- (S -
А^)"
1
]
(itO
-
Aft)"
1
-f r
0
(s
Сделаем перестановку членов
в
правой части
ко)"
2]
r
h
(ia>
—
A,
ft
)"
1
+ r
0
/г=1
(S
-
/со)"
1
-f
+ S
М^-'ЮГЧЗ-АЙ)"
1
.
(9.44)
Заметим,
что
частотная характеристика
W (too)
рассматрива-
емой системы получается
из (9.42) для
передаточной функции
W (s)
подстановкой
s = ш, т. »е.
п
С учетом
(9.45)
перепишем
(9.44)
*вых
= W (tCO) (S
Из табл.
5.1
имеем:
uo)-
1
/-
&
^ -
/со)"
1
(s -
Aft)"
1
.
(9.45)
(9.46)
(s-Aft)"
1
^
eV
;
(
s
_
l
-
(o)
-i
<:
_
e
'
w
.
Эти формулы позволяют перейти
от
изображений
(9.46) к
ори-
гиналам
на
основании свойств линейности
(см. §5.1)
п
*вых
= W («со) е"»< + Ц /-ft (А
й
- ioj)-
1
e
V.
Здесь
Aft—
корень характеристического уравнения системы.
Если система устойчива,
то А
й
< 0 и при t -+ оо
второй член
в правой части
—
остаточная функция
—
стремится
к
нулю.
Остаточный член
для
устойчивой системы, частотная характери-
стика которой выражена уравнением
(5.33),
порождается
под
влиянием начальных условий.
Он
быстро исчезает
при
обычно
больших запасах
по
устойчивости,
и
остается лишь гармоническая
часть выходной функции.
При
экспериментальном снятии частот-
ной характеристики
W (/со)
надо выждать некоторое время, пока
наступит такой режим.
Таким образом, гармоническая функция
в
качестве тестовой
удобна
тем, что в
указанных условиях гармонические колебания
сохраняются
на
выходе,
а
меняются лишь амплитуда
и
фаза.
140
ГЛАВА
10.
УРАВНЕНИЯ ДВИЖЕНИЯ
И ПРОЦЕССОВ
В
ЗВЕНЬЯХ
Эта глава посвящена составлению уравнений типовых
элементов систем регулирования турбин применительно, прежде
всего,
к
решению задач устойчивости.
Для
этой цели будем изу-
чать малые колебания динамических систем около
ее
положения
равновесия
(§ 5.2). Как
указывалось, этими уравнениями можно
будет пользоваться
и для
описания переходных процессов,
но
лишь
в
пределах, ограниченных приблизительно линейными
участками статических характеристик элементов динамических
систем.
Для составления уравнений движения
и
процессов требуются
детальные знания статических характеристик объектов регулиро-
вания
и
влияния
на них
различных параметров динамической
системы.
Это
задачи сугубо инженерные, требующие специальных
знаний. Прежде
чем
приступить
к
составлению уравнения какого-
либо элемента динамической системы, следует сформулировать
два основных положения: научную принципиальную базу реша-
емой задачи
и
допущения, связанные
с
принятыми упрощениями
математической модели.
Для
выбранной модели должны быть
указаны границы
ее
применимости.
Любое динамическое звено представляет собой аккуму-
лятор энергии, массы, электричества
и т. п.,
характеристика
которого дается
в
виде динамических констант.
Главный элемент изучаемых динамических систем
— это
объект
регулирования, включающий
и
распределительные органы рабо-
чего тела.
На
него ориентируется конструктор, выбирая другие
элементы динамической системы
и их
характеристики.
С
него
мы
и
начнем.
§ 10.1.
УРАВНЕНИЕ РОТОРА
Рассматривая турбину
как
объект регулирования,
бу-
дем иметь
в
виду
ее
вращающиеся массы
—
ротор,
на
который
действуют силы
от
потока рабочего тела,
и
распределительные
органы (клапаны, форсунки),
с
помощью которых можно изменять
эти силы
в
определенных пределах. Характеристики распредели-
тельных органов могут быть весьма разнообразны
в
зависимости
от типа турбинной установки (паро-
или
газотурбинная)
и
рабочей
машины,
для
которой
эта
установка служит
в
качестве привода
(электрический генератор, компрессор). Здесь
мы
рассмотрим
лишь характерные примеры,
на
базе которых могут решаться
многообразные задачи динамики регулирования современных
турбин.
Турбина—генератор.
На
ротор агрегата
со
стороны турбины
действует вращающий момент
УИ
Т
, а со
стороны генератора
—
момент
сил
сопротивления
М
Г
- При
установившемся движении
141
ротор вращается равномерно,
что
возможно лишь
при
равенстве
момента движущих
сил и
момента сопро-
тивления,
т. е. при
Мто—
М
г0
= О, (ЮЛ)
где нулевым индексом,
как и
всюду дальше, отмечены величины,
относящиеся
к
установившемуся движению.
В переходном процессе, вообще говоря,
М
Т
Ф М
г
, и
движение
ротора ускоряется
или
замедляется. Чтобы описать переходный
процесс, воспользуемся теоремой
о
главном
мо-
менте количества движения системы
ма-
териальных точек: производная
по
времени
от
главного
момента количества движения системы относительно
оси не-
изменного направления равна главному моменту внешних
сил
относительно этой
оси, т. е.
d
(J(л)Ш
=
УИ
Т
— М
Г
, (Ю.2)
где
/ —
момент инерции ротора (постоянная величина);
со —
угловая скорость.
Теорема
о
моменте количества движения, впервые выдвинутая
Эйлером
при
выводе
его
знаменитого турбинного урав-
нения,
и
является научной базой
при
составлении уравнения
ротора.
Если роторы турбины
и
генератора имеют различные угловые
скорости
и, и а
2
и их
моменты инерции
J
x
и /
2
, то в
общее урав-
нение ротора
(10.2)
следует подставить приведенный
момент инерции
/ = J
x
-f
/..coj/co?.
Вычтем почленно
(10.2) из (10.1) и
обозначим:
М
Т
— М
г0
=
= АМ
Т
; М
г
— М
г0
= АМ
Г
.
Тогда уравнение ротора примет
вид
Jda/dt = АМ
Т
— АМ
Г
. (ю.З)
Момент действующих
сил в
турбине можно выразить
так:
М
Т
= G#rj
e
/co, (Ю.4)
где
G —
расход рабочего тела турбиной;
Я —
удельная теорети-
ческая работа;
г\
е
—
эффективный
КПД
турбины.
Если распределительные органы турбины находятся
так
близко
от
нее, что при их
перемещении
т
практически мгновенно изме-
няются расход
G и
удельная теоретическая работа
Я, то с
доста-
точной точностью можно считать вращающий момент зависящим
только
от
переменных
/пи со, т. е.
М
г
= f (т, со). (Ю.5)
Момент
сил
сопротивления
в
генераторе можно представить
в виде функции
от
угловой скорости
со и от
изменения сопротивле-
ния сети
в
зависимости
от
времени
t, т. е.
МР
=
/(СО,
t). (Ю.6)
142
Исследуя малые колебания, разложим функции
(10.5) и (10.6) в
ряды
по
степеням
Am и Асо,
сохранив лишь вели-
чины первого порядка малости, после чего получим:
АМ
Т
= (dMJdm) Am + (dMJdat) Асо; (10.7)
АМ
Т
=
(дМ
т
/дв>)
Асо + АМ
Г
(t), (10.8)
где
АМ
Т
(t) —
изменение момента
сил
сопротивления
под
вли-
янием импульсов
в
электрической сети;
эта
функция представляет
собой внешнее воздействие, порождающее выну-
жденные колебания динамической системы.
Подставив
(10.7) и (10.8) в (10.2) и
обозначив Am/m
max
= x
m
,
Асо/со
0
= х
а
и АМ
Г
(t) =
Шпих,
получим
+
xjT
a
=
xJT
m
-
tyTx,
С
10
-
9
)
где
Т
а
= J/(dM
r
/du —
дМ
т
/дю);
T
m
= J(o
0
/(dM
r
/dm)
т
шах
;
Т
%
=
=
/сОо/Мтах-
Все динамические константы
Т
имеют размерность времени.
Они сохраняют свою величину
в
течение всего времени малых коле-
баний около положения равновесия, соответствующего тому
ре-
жиму работы,
для
которого проводится исследование.
Но для
другого режима работы
эти
константы могут отличаться.
Уравнение
(10.9)
можно записать
и так (без
внешнего воздей-
ствия):
7'.*. + X. = fcfm,
(
10Л
°)
где
k =
TJT
n
—
коэффициент усиления
(см. § 8.1);
поскольку
момент инерции ротора сокращается, коэффициент
k
характери-
зует лишь статические свойства звена.
Уравнение
(10.10)
соответствует апериодическому
звену
(см. § 7.2) с его
частотными характеристиками
и
пере-
ходной функцией.
Это
звено обладает свойством саморегу-
лирования:
его
переход
к
новому установившемуся движению
в принципе возможен
без
вмешательства регулятора.
В
этом легко
убедиться, если
в
правой части
(10.10)
заданная величина
х
т
во время перехода
к
новому равновесному режиму сохраняется
постоянной,
а
меняется только угловая скорость,
т. е.
величина
х
а
.
Уравнение
(10.10)
можно записать
в
операторной форме
(Т
0
р +
+ 1) х
а
= kx
m
или в
изображениях
Q(s)x
e>
= kx
m
, (Ю.П)
где оператор
Q (s) = T
a
s + 1.
Динамические константы. Частные производные, входящие
в состав динамических констант
в
уравнении ротора, находятся
по заданным статическим характеристикам турбины
и
генератора.
Некоторые
из
этих характеристик могут быть выражены аналити-
чески,
но
чаще всего
их
задают
в
виде графиков.
При
подготовке
графического материала
для
вычисления частных производных
143

ma-
ТГ1
Ш
0
СО
необходимо помнить,
что в
рассматриваемых функциях
все
вели-
чины остаются постоянными, кроме одной,
по
которой берется
производная.
В
обычных
же
тепловых
и
газодинамических расче-
тах графики моментов
или
мощностей относятся
к
разным уста-
новившимся режимам работы,
при
которых
все
параметры, опре-
деляющие режим,
в той или
иной мере различаются.
Для
исполь-
зования
в
расчетах процессов регулирования
эти
графики следует
перестроить.
На
рис. 10.1
показаны примеры графиков изменения враща-
ющего момента паровой турбины только
в
зависимости
от
поло-
жения клапана
т и
только
от
угловой скорости
ю, а на рис. 10.1, б
дан график момента сопротивления генератора
М
г
в
зависимости
от
со. Из
этих графиков ясно,
что
dW
T
/dco
< 0, а
дМ
г
/дш
> 0,
так
что
всегда
Т
ш
> 0. В
частном случае, если характеристики
турбины близки
к
линейным, можно принять: (дМ
т
/д/п) т
тах
=
=
M
rmax
;
{дМ
т
/ды)
со
0
= Мл,, где М
т0
= М
т тах
,
если рассма-
тривается режим работы паровой турбины
при
полном открытии
клапанов,
что
соответствует максимальной мощности.
Изменение момента сопротивления генератора
в
зависимости
от угловой скорости определяется
по
опытным характеристикам
с учетом особенностей электрической сети,
на
которую электри-
ческий генератор работает.
В
приближенных расчетах можно
пользоваться формулой изменения мощностей
(N/N
0
)
=
(со/соо)",
где
а « 2,
если
в
сети преобладает нагрузка
от
металлорежущих
станков,
и Й«3,
если основная нагрузка передается
в
сеть
от
электромоторов, вращающих турбомапшны (насосы, компрессоры
и
др.).
Динамические константы
в
уравнении ротора имеют довольно
ясный физический смысл.
Так,
например,
в (10.10)
динамическая
константа
7
Ш
, как уже
отмечалось, определяет свойства само-
регулирования турбины,
а в
более широком аспекте
—
свойства
любой машины
или
процесса, представляемых апериодическим
144
звеном. Покажем
это на
примере паровой турбины, вращающей
генератор, работающий
на
изолированную электрическую сеть.
Если
с
турбогенератора, несущего полную нагрузку, внезапно
сбросить
всю
мощность,
а
регулятор вообразить бездействующим,
то турбина пойдет
в
разгон.
При
этом клапан останется полностью
открытым,
и
расход пара турбиной
в
первом приближении можно
считать неизменным.
Но и в
этих условиях
в
силу внутренних
свойств турбины
при
некоторой частоте вращения установится
новый режим работы. Дело
в том, что по
мере увеличения окруж-
ной скорости рабочего колеса растут
при
входе
в
него отрица-
тельные углы атаки
и
угол поворота потока
в
рабочем колесе
уменьшается. Когда
же
окружная скорость рабочего колеса
превысит приблизительно
в два
раза расчетную, циркуляция
потока вокруг профилей лопаток приблизится
к
нулю
и
турбина
не будет производить полезной работы,
а
разгон
ее
ротора прекра-
тится.
Но
лишь
для
немногих типов турбин малой мощности
можно допустить такой разгон ротора, исходя
из
требований
к
его
прочности. Разгон
же
роторов крупных турбин должен быть
ограничен
по
частоте вращения примерно
до 10 %, а в
редких
случаях
до 20 % от ее
номинального значения.
Примеры вычисления динамических констант.
В
частном слу-
чае,
когда сброшена
вся
электрическая нагрузка, момент
сил,
действующих
в
генераторе,
уже
мало меняется
в
зависимости
от
со, и
можно принять дМ
г
/ды
= 0. При
этом условии кон-
станта
Т
а
в
составе
(10.9)
имеет
в
знаменателе только производ-
ную —дМ
т
/д(й. Воспользуемся функцией
М
т
= f (со) при m =
=
/и
гаах
= const,
представленной
на рис. 10.1, б в
виде прямой
линии.
Для нее
имеем
—dAf
T
/dcO
= М
г
max/Wo
где
со
0
= со
н
—
номинальная угловая скорость.
Аналогично
для
функции
М
т
= / (th) при со = со
0
= const,
представленной
на рис. 10.1, а
приближенно
в
виде прямой линии,
можем записать
дМ
т
/дт
=
7W
Tmax
//n
max
,
где m
max
—
подъем клапана
на
номинальном режиме
при со = со
0
.
В данном случае динамические постоянные
Т
а
и Т
т
в
составе
(10.9)
имеют одно
и то же
выражение через максимальный момент
Тц,
= Т
т
= J(o
0
/M
T
„,ах.
а
коэффициент усиления
k в (10.10)
равен единице.
Исходя
из
этих предпосылок выясним
на
примерах физический
смысл динамической константы
Т
ш
в
составе
(10.10).
Допустим,
что клапаны турбины полностью открыты
(т =
т
шах
),
работает
она
при
номинальной частоте вращения
(со = со
н
) и вся
электри-
ческая нагрузка
с
генератора мгновенно сброшена,
а
регулятор
с этого момента
не
действует.
При
отсчете координат
от
старого
положения равновесия клапан находится
от
него
в
начальный
145
момент после сброса нагрузки
на
расстоянии
х
т
= 1 ив
таком
состоянии остается
все
время процесса.
Для
принятых начальных
условий перепишем
(10.10) так:
Т(0^0)
"т"
Х
а
1
•
Процесс апериодического звена заканчивается
при
t-^-oo,
когда х
а
-+0.
Это
значит,
как
видно
из (10.10), что при k = 1
и
х
т
= 1
относительное отклонение угловой скорости
х
а
тоже
равно единице.
А так как х
а
=
Асо/со
0
,
то при х
а
= 1
отклонение
Дм
от
номинальной угловой скорости
со
н
= со
0
достигает
той же
величины
со„.
Иными словами,
в
новом равновесном состоянии
частота вращения
со
р
в
результате разгона становится
в два
раза
выше,
чем
номинальная,
т. е. со
р
=
2со
н
.
Это,
естественно, следует
и
из
графика
на рис. 10.1,6, по
которому вычислялась произ-
водная дМт/ды.
Как было показано
в § 7.1,
динамическая постоянная
Т
а
представляет собой время, которое отсекает
на
линии нового
равновесного режима касательная, проведенная
к
кривой про-
цесса
в
исходной его* точке
(см. рис. 7.1). В
данном примере
новый режим
— это
холостой
ход
неуправляемой турбины,
а время
Т
а
потребовалось
бы для
разгона ротора
до
приблизи-
тельно двойной частоты вращения
при
мгновенном сбросе полной
нагрузки
и при
условии,
что
разгон происходил
бы с
постоянным
ускорением, равным начальному
его
значению. Более точно было
бы
определить, скажем,
67"
И
как
время повышения частоты вращения
ротора
на
величину
бсо, где б —
коэффициент неравномерности,
а
со —
номинальная частота вращения. Другими словами,
за
время
8Т
а
при
указанных выше условиях ротор разгоняется
на
величину, равную максимальному изменению частоты вращения
по статической характеристике регулирования
(см. рис. 3.1).
Время
Т
а
хорошо характеризует требования
к
быстродействию
системы регулирования
и
защитных устройств.
Так,
например,
если
Т
ш
= 5 с и б = 0,04, так что 6Т
Ю
= 0,2 с, то при
полном
внезапном сбросе нагрузки
и
неподвижном клапане
(m = m
max
)
частота вращения возрастает
на
бсо
0
за
время, несколько большее
0,2 с, а на 10 % от со
0
за
время, немногим более
0,5 с.
Чтобы огра-
ничить разгон
до
безопасной величины, система регулирования
должна
с
первого мгновения после сброса нагрузки быстро
по-
давлять действующие
на
ротор силы путем закрытия клапанов.
Ротор
как
интегрирующее звено. Если регулируемая вели-
чина
х
а
меняется мало
в
пределах статической характеристики
регулирования,
т. е. мал
коэффициент неравномерности
б и
велик
коэффициент усиления
k, то
величина
х
а
в (10.10)
становится
пренебрежимо малой
по
сравнению
с
величиной
kx
m
. В
таких
случаях радиус
k/2
амплитудно-фазовой характеристики апериоди-
ческого звена становится настолько большим
(см. рис. 7.2), что
существенные частоты оказываются сосредоточенными
у
мнимой
оси плоскости
W (ш) и
апериодическое звено вырождается
в ин-
146
тегрирующее
(см. § 7.3),
математическая модель которого выра-
жается уравнением
T
a
x
0
= kx
m
. (10.12)
Последнее уравнение получено
с
пренебрежением второго
члена
в
левой части
(10.9), что
равносильно разложению
в ряд
функции
7И
Т
только
по
одной координате
т.
Обозначив
для
этого
случая
TJk = Т
а
,
запишем
(10.12) в
таком виде:
Т
а
х
а
= х
т
, (10.13)
где
Т
а
= Jio
0
/((dMJdm) m
max
). (10.14)
Поскольку
при
вычислении
Т
а
берется полная производная
от момента
по
координате
т, то и
график
для
вычисления этой
производной надо строить
с
учетом статического изменения
ча-
стоты вращения
в
зависимости
от
нагрузки.
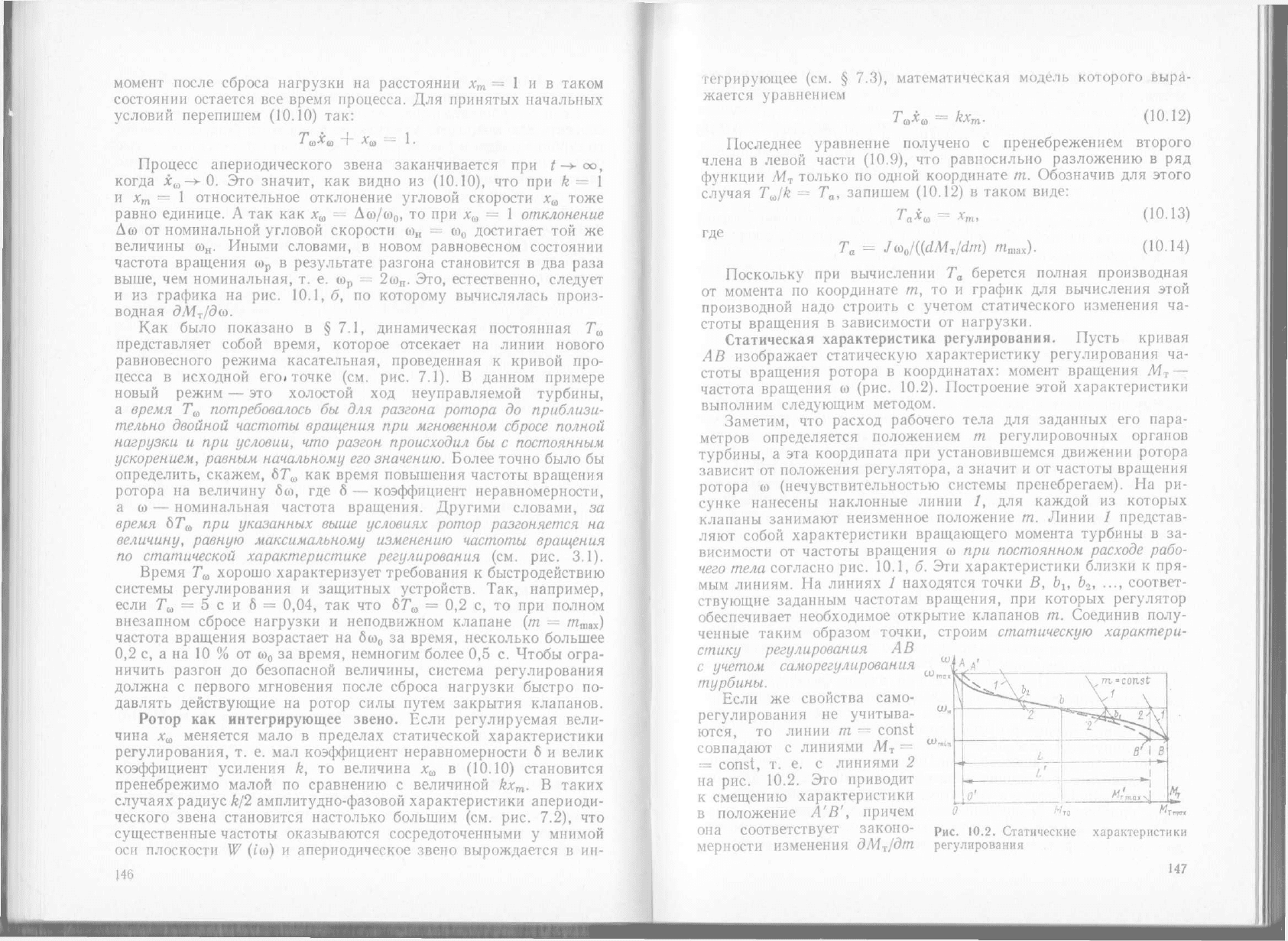
Статическая характеристика регулирования. Пусть кривая
А
В
изображает статическую характеристику регулирования
ча-
стоты вращения ротора
в
координатах: момент вращения
уИ
т
—
частота вращения
to (рис. 10.2).
Построение этой характеристики
выполним следующим методом.
Заметим,
что
расход рабочего тела
для
заданных
его
пара-
метров определяется положением
т
регулировочных органов
турбины,
а эта
координата
при
установившемся движении ротора
зависит
от
положения регулятора,
а
значит
и от
частоты вращения
ротора
со
(нечувствительностью системы пренебрегаем).
На ри-
сунке нанесены наклонные линии
/, для
каждой
из
которых
клапаны занимают неизменное положение
т.
Линии
/
представ-
ляют собой характеристики вращающего момента турбины
в за-
висимости
от
частоты вращения
со при
постоянном расходе рабо-
чего тела согласно
рис. 10.1, б. Эти
характеристики близки
к
пря-
мым линиям.
На
линиях
1
находятся точки
В, Ь
ъ
Ь
2
,
соответ-
ствующие заданным частотам вращения,
при
которых регулятор
обеспечивает необходимое открытие клапанов
т.
Соединив полу-
ченные таким образом точки, строим статическую характери-
стику регулирования
А В
с учетом саморегулирования
турбины.
Если
же
свойства само-
регулирования
не
учитыва-
ются,
то
линии
т = const
совпадают
с
линиями
М
Т
=
=
const, т. е. с
линиями
2
на
рис. 10.2. Это
приводит
к смещению характеристики
в положение
А'В',
причем
о м
п
м
Тш
,
она соответствует ЗЭКОНО-
р
ис
. ю.2.
Статические характеристики
мерности изменения дМ
т
/дт
регулирования
147
и максимальному ходу клапанов. Суммарное
же
изменение
мо-
мента, отвечающее рабочему ходу клапанов
/и
шах
и
отклонению
угловой скорости бсо
н
, представляет собой
(dM^dm)
m
max
= (dMjdm)
т
шах
+ (dMjdco)
бсо
н
.
(10.15)
А
так как при
строго линейных статических характеристиках
имеем:
(dMJdm)
т'
тах
= Л1,
max
и
(дМ/ды) 8со
н
«
—6Л4
Т
шах
, то
(dMJdm)
т
шах
» (1 - б) М
т тах
. (10.16)
В построении характеристики можно учесть
и
сопротивление
сети, вычтя
из
правой части
(10.15)
сопротивление генератора
(дМ
г
/до>) бсо
н
.
Из
(10.14) и (10.16)
следует,
что
время ротора
в
интег-
рирующем звене
(10.13)
Т
а
= Т
т
О -
б)"
1
, (Ю.17)
где
Т
т
—
время ротора
в
апериодическом звене
(10.9).
При малых коэффициентах неравномерности
б
поправка дина-
мической константы
T
fl
на
саморегулирование невелика.
Физический смысл динамической константы
Т
а
. Его
можно
сформулировать
так же, как для Т
ш
.
Примем, весьма прибли-
женно,
в (10.13)
одно
и то же
среднее значение
Т
а
при
всех поло-
жениях клапанов турбины
и
вообразим,
что
произошел мгновен-
ный сброс полной нагрузки
с
турбины
и что во
время последу-
ющего процесса клапаны остаются полностью открытыми
(х
т
=
=
1). В
таких условиях время
Т
ь
, в
течение которого частота
вращения ротора
х
а
изменится
от
нуля
до б и
достигнет
ее
значе-
ния
на
установившемся холостом ходу, найдем
из
уравнения
Т
а
j dx
a
= j dt или
о
о
Т
6
= 6Т
а
. (10.18)
Комплекс
бГ
а
имеет смысл времени разбега ротора турбины
(после мгновенного снятия максимальной нагрузки)
в
пределах
полного изменения частоты вращения
по
статической характери-
стике
при
максимальном расходе рабочего тела
и при
неизменных
его параметрах. Последние оговорки имеют физический смысл
для таких двигателей,
как
паровая турбина, гидротурбина, паро-
вая машина,
в
которых клапаны могут оставаться полностью
открытыми,
а
параметры рабочего тела могут сохраняться
за
счет
аккумулирующей способности котла
или
иного резервуара.
Но
это немыслимо, например,
для
многих типов газотурбинных
установок.
Все же
данная трактовка времени разбега
там, где
она применима, полезна
для
того, чтобы представить себе ско-
рость протекания процесса
в
экстремальных условиях.
Турбина—компрессор. Если
в
качестве рабочей машины слу-
жит компрессор
с
моментом сопротивления
М
к
, то
уравнение
148
ротора
(10.9) или (10.10) как
полученное
для
апериодического
звена остается
в
силе. Меняется лишь
вид
динамической кон-
станты
Г
ш
, в
которую войдет производная (дМ
к
/да)
в
соответствии
с характеристикой компрессора (вместо генератора).
При
этом
Т
а
=
J/(dM
T
/da
—
дМ
к
/ды).
(10.19)
Мощность компрессора изменяется приблизительно пропор-
ционально кубу частоты вращения, поэтому велик эффект само-
регулирования агрегата
в
целом.
К
тому
же и
рабочий диапазон
изменения частоты вращения компрессора обычно значительно
больше,
чем
генератора.
Более сложные связи имеются между газовой турбиной
и
цикловым компрессором.
Они
будут рассмотрены
в гл. 16.
§
10.2.
УРАВНЕНИЕ ЕМКОСТИ
Емкость
под
давлением
в
качестве аккумулятора жидко-
сти,
газа
или
пара часто встречается
как
объект,
в
котором регу-
лируется давление,
или как
одно
из
промежуточных звеньев
динамической системы. Рассмотрим
два
вида такой емкости:
с постоянным
и с
меняющимся
во
времени объемом. Параметры
в
нем
будем считать сосредоточенными.
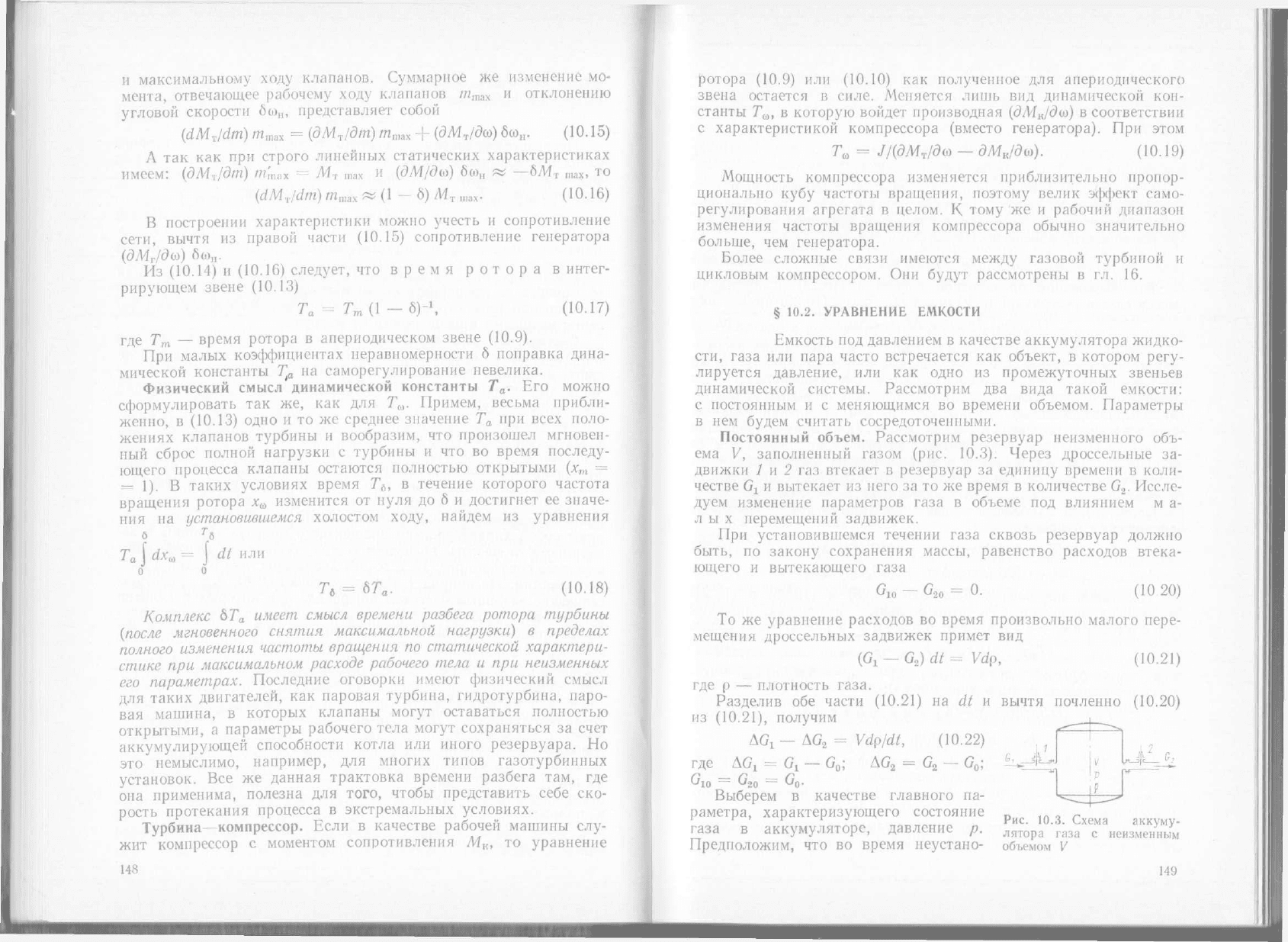
Постоянный объем. Рассмотрим резервуар неизменного объ-
ема
V,
заполненный газом
(рис. 10.3).
Через дроссельные
за-
движки
1 и 2 газ
втекает
в
резервуар
за
единицу времени
в
коли-
честве
Gj и
вытекает
из
него
за то же
время
в
количестве G
2
. Иссле-
дуем изменение параметров газа
в
объеме
под
влиянием
м а-
л
ы х
перемещений задвижек.
При установившемся течении газа сквозь резервуар должно
быть,
по
закону сохранения массы, равенство расходов втека-
ющего
и
вытекающего газа
Сю
G
9
„
= 0.
(10 20)
То
же
уравнение расходов
во
время произвольно малого пере-
мещения дроссельных задвижек примет
вид
(Gj
— G
2
) dt = Vdp, (10.21)
где
p —
плотность газа.
Разделив
обе
части
(10.21) на dt и
вычтя почленно
(10.20)
из
(10.21),
получим
AG
X
— AG
2
=
Vdp/dt,
(10.22)
где AG
X
= G
x
—
G
0
;
AG
2
= G
2
— G
0
;
G
10
= G
20
= G
0
.
Выберем
в
качестве главного
па-
раметра, характеризующего состояние
газа
в
аккумуляторе, давление
р.
Предположим,
что во
время неустано-
Рис.
10.3.
Схема аккуму-
лятора газа
с
неизменным
объемом
V
149

вившегося процесса состояние газа
в
резервуаре изменяется
по
литропно,
т. е.
рр
11
р
0
р^
п
,
где я —
показатель политроны.
Продифференцировав левую часть последнего уравнения
и
поделив
обе его
части
на dt,
найдем
pdp/dt
=
npdp/dt,
(10.23)
где
р =
Ро
+
Ар;
р = р
0
+ Ар.
Изучая малые колебания, надо считать производные
р и р
величинами малыми,
а
произведения
р
Ар
и р Ар —
величи
нами второго порядка малости. Отбросив величины второго
по
рядка малости, равенство (10.23) запишем
так:
dpjdt
= п
1
(р
0
/р
0
)
dp/dt.
(10.23')
Это выражение производной введем
в
(10.22)
и
обозначим
массу газа
в
резервуаре
(р
0
У)
через £>
0
. Тогда (10.22) примет
вид
(D
0
/np
0
)
dp/dt
=
AG,
—
AG,. (10.24)
Массовые расходы газа
G
x
и G
2
зависят
от
положения распре
делительных органов
т
х
и т
2
,
от
давления
в
резервуаре
р, а
также
от давления
р
х
в
подводящем
и р
2
в
отводящем патрубках. Учет
переменного
во
времени давления
в
патрубках
не
вызывает каких
либо принципиальных трудностей.
Но для
выделения главных
свойств изучаемого звена
в
рассмотренном ниже примере давление
в патрубках примем неизменным,
как это
будет встречаться
во
многих задачах устойчивости
в
дальнейшем изложении предмета.
В этой постановке задачи расходы газа
G
x
и
G
2
можно представить
в виде функций лишь двух переменных:
G
x
= f
x
(т
ъ
р); G
2
=
=
As
(
т
2,
Р)>
и в
области малых колебаний будут справедливы
разложения
в
ряды:
AG
X
=
(dGJdmJ
Ат
х
+
{dGJdp)
Ар;
(10.25)
AG
2
=
{dGJdm
2
)
Am
2
+
{dGJdp)
Ap.
(10.26)
Подставив выражения расходов (10.25)
и
(10.26)
в
(10.24)
и записав переменные
в
относительных величинах, получим
уравнение газового объема
в
операторной форме
(Т
р
р
+
1)
х
р
= k
x
x
mi
— k
2
x
mz
,
(10.27)
где
х
р
=
Ар/р
0
;
х
П1
=
Amjm
x max
;
x
m
, =
Am
2
/m
2
max
— от
носительные координаты;
T
p
=
{DJn)/{G
0
k
a
)
—
время объема; (10.28)
k
x
=
{dGJdm
x
)
m
l
m!iX
/(G
0
k
e
);
К
=
(dG
2
/dm
2
)
m
2
m
J{G
0
k
G
)
—
коэффициенты уси
ления;
k
G
=
(dG
2
/dp
—
dGJdp) p
0
/G
0
—
коэффициент само
регулирования.
Физический смысл коэффициента саморегулирования: апери
odmecKoe
звено находит после нарушения
в нем
материального
150
баланса новое равновесное состояние
без
помощи регулятора
и
только
за
счет изменения daвлeнuя
в
данном объеме. Заметим,
что
в составе коэффициента саморегулирования
dGJdp
< 0,
a
dGJdp t>
0.
Если один
из
распределительных органов остается неподвиж
ным,
то
соответствующий коэффициент усиления становится
равным нулю.
В
этом случае (10.27) описывает процесс
в
апери
одическом звене
(§ 7.1).
Если
же
расход меняется перед емкостью
и
за
нею,
то к
апериодическому звену добавляется параллельная
связь
с
координатой
х
т2
.
Коэффициенты усиления
k
x
и k
2
харак
теризуют эффект воздействия распределительных регулировочных
органов
т
х
и т
2
по
сравнению
с
эффектом саморегулирования,
который представлен выражениями
в
знаменателях этих коэф
фициентов.
Если рассматривать движение лишь одного распределитель
ного органа
с
координатой
т,
можно уточнить физический смысл
коэффициента усиления
k. Для
этого отнесем переменную вели
чину
х
р
не к
давлению
р
0
, а к
разности давлений
p
max
— p
m
^
по статической характеристике звена
при
изменении координаты
т
в пределах рабочего хода m
max
. Тогда коэффициент
k
покажет,
во сколько
раз
регулировочный орган
с
линейной характеристи
кой сильнее воздействует
на
расход
G, чем
изменение регулиру
емого давления
в
заданных пределах.
Динамическая константа
Т
р
—
время емкости.
Она
характеризует,
в
некоторой мере, время переходного процесса
при полностью открытом регулировочном органе
т и
линейном
изменении давления
р в
интервале
от
р
тХп
до
р
тах
[по
касательной
в исходной точке экспоненты, изображающей переходный
процесс
(см. рис. 7.2)
I.
Показатель политропы
п в
условиях слабого теплообмена
может рассматриваться
как для
изоэнтропы
(п = k), а в
некото
рых случаях, когда, например, велика масса нагретого
ме
талла,
—
как
для
изотермы
(п =
1).
В
большинстве решаемых
задач
не
требуется большой точности
в
определении показателя
п.
Переменная емкость. Аккумулятор, изменяющий свой объем
с ростом
или
падением давления, представлен
на рис. 2.7
в виде цилиндра
и
поршня
3,
нагруженного пружиной.
Для
координат, определяющих состояние данной динамической
си
стемы, сохраним обозначения предшествующего подпараграфа.
На основании закона сохранения массы можем записать
(AG,
—
AG
2
)
dt = d (pV)
или
при V = V
0
в
равновесном состоянии
V
0
dp/dt
+
pdV/dt
=
AG,
—
AG
2
, (10.29)
где
dV = Fdm; m —
перемещение поршня;
F —
активная пло
щадь поршня.
15J
Расходы
G, и G
2
представим
как
функции перемещения дрос
селей
т, и т
2
и
давления
в
резервуаре
/?.
Выполнив обычное разложение
в
ряд
функций
Gj и
G
2
,
урав
нение
(10.29)
применительно
к
малым колебаниям можно запи
сать
так:
V
0
dp/dt
+
p
0
Fdm/dt
=
(dGJdm^
Ат
х
—
(dG
2
/dm
2
)
Am
2
—
(dGJdp
—
— dGj/ф)
A/?. (10.30)
При сильной пружине роль массы поршня аккумулятора
в процессе регулирования,
как
правило, пренебрежимо мала.
А
в
таком случае можно установить алгебраическую связь между
ходом поршня
т и
давлением
р
или
между скоростями изменения
этих координат
при
жесткости пружины
с
Fdp/dt
=
cdm/dt.
(10.31)
Предполагая процесс политропным, согласно уравнениям
(10.23')
и
(10.31)
найдем связь между производными
по
времени
от плотности газа
р и от
хода поршня
т
dp/dt
=
(p
0
c/(np
0
F))
dm/dt.
(10.32)
Выразив
Ар
через
Am,
поделив
все
члены
(10.30)
на
комплекс
А
=
{dGJdp
—
dGjdp)
cm
max
/F,
(10.33)
заметив,
что
cm
max
/F
=
р
тах
—
p
mln
,
и
использовав
(10.32),
за
пишем уравнение емкости
(10.29)
в
относительных величинах
Т
р
х
т
+ х
т
= k'x
mi
—
k"x
mi
,
(10.34)
где
х,
п
=
Ат/т
тах
;
х
т
, =
Ат^т
х
max
; х
т
, =
Ат
2
/т
2
шах
;
Т
р
Fm
maxPo
(1 +
V
0
c/(F
2
np
0
))/A; (10.35)
k' =
(dGJdmj)
m
x
max
/A;
k" =
(dG
2
/dm
2
)
m
2
max
/A.
Произведение
Fm
max
p
0
представляет собой массу газа,
вы
тесняемую
или
забираемую поршнем
при его
максимальном
ходе
т.
Постоянная
А
характеризует изменение расхода газа
под влиянием изменения давления
р на
величину
р
тах
—
р
тп
,
соответствующую полному рабочему ходу распределительных
органов,
но
при
заданном
их
равновесном положении
т
10
и т.,
0
.
Выражение
Fm
max
pJA
представляет собой отношение максималь
ной массы газа, вытесняемой поршнем,
к
изменению
ее
расхода
при изменении только давления
р на
величину
р
тах
—
p
min
.
Вто
рой член
в
скобках
(10.35)
отражает влияние сжимаемости газа,
поскольку
в
него вошел показатель политропы.
Для
несжимаемой
жидкости этот член следует отбросить.
Если
т
х
и т
2
кинематически связаны между собой,
то в
целом
уравнение емкости представляет апериодическое звено,
и
динами
ческая константа
Т
р
имеет обычный физический смысл
как
харак
теристика времени переходного апериодического процесса
при
единичном возмущении
(см. рис.
7.1),
152
§ 10.1
УРАВНЕНИЕ РЕГУЛЯТОРА
В прямом регулировании командующий орган (регуля
тор) воздействует непосредственно
на
регулировочные органы
ма
шины. Таким регулятор
и
вошел
в
классическую теорию регули
рования, основоположником которой
был
И. А.
Вышнеградский.
Рассмотрим чувствительный элемент
как
звено
с
выходной вели
чиной
в
виде перемещения
его
указателя. Этот элемент,
для
конкретности, представим
в
виде классического регулятора ско
рости
с
вращающимися массами
и
муфтой.
На
него действуют силы,
типичные
для
любого механического регулятора
(рис. 10.4).
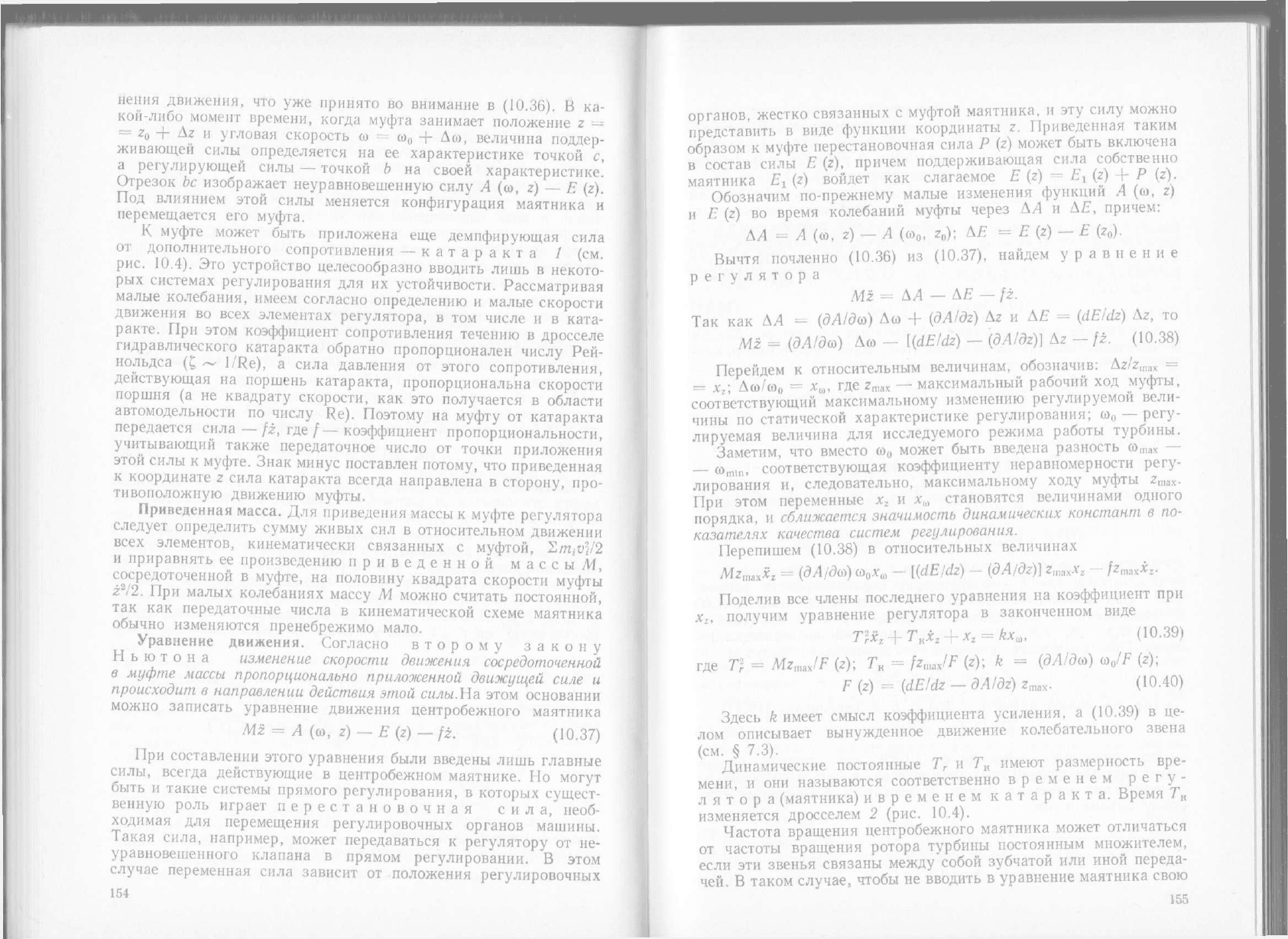
Центробежный маятник.
К
муфте, передающей движение вра
щающихся масс, приложены
две
силы, приведенные
к
координате
г,
определяющей положение муфты
(рис. 10.5):
поддержива
ющая
с и л а £
(г)
и
регулирующая сила (приве
денная центробежная сила)
А
(со,
г)
(см.
§ 1.1).
Силами постоян
ного трения, возникающими
в
сочленениях движущихся частей
маятника, будем пренебрегать.
При установившемся движении турбины
с
частотой вращения
со
0
положение муфты определяется координатой
z
0
(точка
а на
рис.
10.5),
в
которой маятник находится
в
равновесии,
т. е.
А
(со
0
,
г
0
) Е
(г
0
)
= 0.
(10.36)
Допустим малое возмущение
в
силовом поле.
Под его
влиянием
муфта отклоняется
от
положения равновесия
и
изменяются
обе
координаты, соответствующие
ее
мгновенному положению
в мо
мент времени
t: со =
со
0
+
Асо;
г = z
0
+ Az. В
этот момент
на
муфту действует сила
А
(со,
z) в
направлении
оси
z, а в
противо
положном направлении
—
сила
Е
(г). На
рисунке изображены
обе
эти статические характеристики, причем
для
каждой угловой
скорости
со
имеется своя характеристика регулирующей силы.
Сила
же
Е
(г) не
зависит
от
со,
и
она
направлена
в
сторону, проти
воположную
оси
z. Ее
знак учитывается
при
составлении урав
Рис.
10.4.
Центробежный маятник:
/
—
катаракт;
2
—
дроссель;
3
—
золотник
или
клапан
Рис.
10.5.
Силы, действующие
на
муфту регулятора
153
нения движения,
что уже
принято
во
внимание
в (10.36). В ка
койлибо момент времени, когда муфта занимает положение
z =
=
z
0
+ Az и
угловая скорость
со = со
0
+
Асо,
величина поддер
живающей силы определяется
на ее
характеристике точкой
с,
а регулирующей силы
—
точкой
Ь на
своей характеристике.
Отрезок
be
изображает неуравновешенную силу
Л (со, z) — Е (z).
Под влиянием этой силы меняется конфигурация маятника
и
перемещается
его
муфта.
К муфте может быть приложена
еще
демпфирующая сила
от дополнительного сопротивления
—
катаракта
/ (см.
рис.
10.4).
Это
устройство целесообразно вводить лишь
в
некото
рых системах регулирования
для их
устойчивости. Рассматривая
малые колебания, имеем согласно определению
и
малые скорости
движения
во
всех элементах регулятора,
в том
числе
и в
ката
ракте.
При
этом коэффициент сопротивления течению
в
дросселе
гидравлического катаракта обратно пропорционален числу
Рей
нольдса
(£ ~
1/Re),
а
сила давления
от
этого сопротивления,
действующая
на
поршень катаракта, пропорциональна скорости
поршня
(а не
квадрату скорости,
как это
получается
в
области
автомодельности
по
числу
Re).
Поэтому
на
муфту
от
катаракта
передается сила
— fz, где /—
коэффициент пропорциональности,
учитывающий также передаточное число
от
точки приложения
этой силы
к
муфте. Знак минус поставлен потому,
что
приведенная
к координате
z
сила катаракта всегда направлена
в
сторону, про
тивоположную движению муфты.
Приведенная масса.
Для
приведения массы
к
муфте регулятора
следует определить сумму живых
сил в
относительном движении
всех элементов, кинематически связанных
с
муфтой, Ът,ь\/2
и приравнять
ее
произведению приведенной массы
М,
сосредоточенной
в
муфте,
на
половину квадрата скорости муфты
£
2
/2.
При
малых колебаниях массу
М
можно считать постоянной,
так
как
передаточные числа
в
кинематической схеме маятника
обычно изменяются пренебрежимо мало.
Уравнение движения. Согласно второму закону
Ньютона изменение скорости движения сосредоточенной
в муфте массы пропорционально приложенной движущей силе
и
происходит
в
направлении действия этой силы.На этом основании
можно записать уравнение движения центробежного маятника
Mz
= Л (со, г) — Е (z) — fz. (10.37)
При составлении этого уравнения были введены лишь главные
силы, всегда действующие
в
центробежном маятнике.
Но
могут
быть
и
такие системы прямого регулирования,
в
которых сущест
венную роль играет перестановочная сила, необ
ходимая
для
перемещения регулировочных органов машины.
Такая сила, например, может передаваться
к
регулятору
от не
уравновешенного клапана
в
прямом регулировании.
В
этом
случае переменная сила зависит
от
положения регулировочных
154
органов, жестко связанных
с
муфтой маятника,
и эту
силу можно
представить
в
виде функции координаты
z.
Приведенная таким
образом
к
муфте перестановочная сила
Р (z)
может быть включена
в состав силы
Е (z),
причем поддерживающая сила собственно
маятника
Е
г
(г)
войдет
как
слагаемое
Е (z) — Е
х
(z) + Р (г).
Обозначим попрежнему малые изменения функций
А (со, г)
и
Е (г) во
время колебаний муфты через
АЛ и АЕ,
причем:
АЛ
= А (со, z) — А
(<в
0
,
г
0
); АЕ = Е (z) — Е (г
0
).
Вычтя почленно
(10.36) из (10.37),
найдем уравнение
регулятора
Mz
= АЛ — АЕ — fz.
Так
как АЛ =
(<5Л/дсо)
Асо +
(дА/dz)
Az и АЕ =
(dE/dz)
Az, то
Mz
=
(<ЭЛ/<5со)
Асо —
[(dE/dz)
—
(дА/dz)]
Az — fz. (10.38)
Перейдем
к
относительным величинам, обозначив:
Az/z
max
=
= x
z
;
ACO/COQ
= x
a
,
где
z
max
—
максимальный рабочий
ход
муфты,
соответствующий максимальному изменению регулируемой вели
чины
по
статической характеристике регулирования;
со
0
—
регу
лируемая величина
для
исследуемого режима работы турбины.
Заметим,
что
вместо
со
0
может быть введена разность со,
шх
—
—
со
т
щ,
соответствующая коэффициенту неравномерности регу
лирования
и,
следовательно, максимальному ходу муфты z
max
.
При этом переменные
x
z
и х
ш
становятся величинами одного
порядка,
и
сближается значимость динамических констант
в по
казателях качества систем регулирования.
Перепишем
(10.38) в
относительных величинах
Mz
max
x
z
=
(дЛ/dco) со
0
х
ш
— [(dE/dz)
—
(дА/dz)}
z
max
x
z
—
/z
max
i
z
.
Поделив
все
члены последнего уравнения
на
коэффициент
при
x
z
,
получим уравнение регулятора
в
законченном виде
T?x
z
+
T
K
x
z
+ x
z
= kx
a
, (10.39)
где
Tj =
Mz
m
jF
(z); Т
к
=
fz
imx
/F
(z); k =
(дА/да)
щ/F (z);
F
(z) =
(dE/dz
—
дА/dz) z
max
.
(10.40)
Здесь
k
имеет смысл коэффициента усиления,
а (10.39) в це
лом описывает вынужденное движение колебательного звена
(см.
§ 7.3).
Динамические постоянные
Т
г
и Т
к
имеют размерность вре
мени,
и они
называются соответственно временем регу
лятора (маятника) ивременем катаракта. Время
Т
к
изменяется дросселем
2 (рис.
10.4).
Частота вращения центробежного маятника может отличаться
от частоты вращения ротора турбины постоянным множителем,
если
эти
звенья связаны между собой зубчатой
или
иной переда
чей.
В
таком случае, чтобы
не
вводить
в
уравнение маятника свою

z
0
Z z
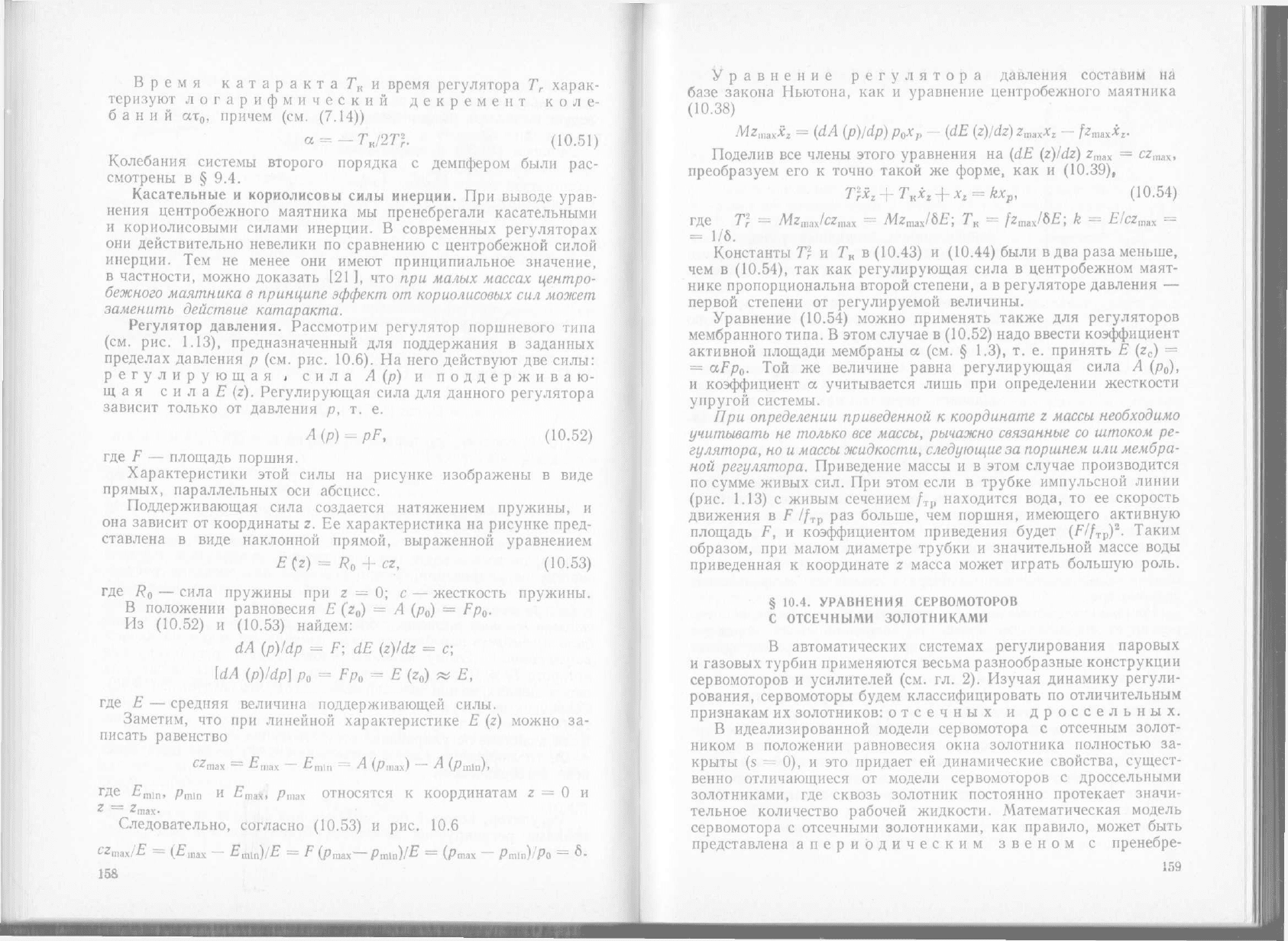
Рис. 10.6.
Силы, действующие
на
указатель регулятора давления
угловую скорость, достаточно
по
строить характеристику регули
рующей силы
Л (to, z) как
при
веденную
к
угловой скорости
ро
тора турбины.
Чтобы уточнить физический
смысл динамических постоянных,
воспользуемся выведенным
в
§
1.1
выражением регулирующей силы
Л
(со,
г) =
со
2
С (г). Из
этого
равенства
и
(10.36)
следует,
что:
COQC
(Z„)
= Е
(г
0
);
дА/да
=
= 2со
0
С
(г
0
);
(дА/да)
со
0
= 2Е (*
0
).
(Ю.41)
Статические характеристики современных регуляторов близки
к линейным. Заменив
их
прямыми
(рис. 10.5),
можно ввести сле
дующие геометрические представления:
BF
=
(dE/dz)
z
max
;
Ш =
(dA/dz)
г
шах
;
BD
=
(dE/dz
дА/дг)
г
шх
= F (г).
С другой стороны
BD = А
(С0
гаах
,
2
Ш
ах)
— Л
(co
nlin
,
Z
max
),
а
так
как
были введены тождества
Л
(со
шах
, г„,
ах
)
=
со
тах
С (г
тах
)
и
л
(<">mln.
2
ТАХ
)
= CO
MIN
C
(Z
max
),
TO
BD = С
(Z
max
)
(C0,na
x
—
C0
mln
) (cO
max
f
CO
mln
).
Заметам,
что по
определению со,
1ах
+
co
mln
=
2со
0
и
co
max
—
co„,in
—
осо
с
,
где б —
коэффициент неравномерности регуля
тора.
При
небольшом изменении регулирующей силы со
2
С
(z)
в зависимости
от
координаты
г
можно принять
со^С (z
max
)
«
«co
C
C(z
c
)=£,
где Е —
средняя величина поддерживающей
силы.
При
сделанных допущениях окончательно получим
F
(z) = BD « 2ЬЕ.
Так
же
можно принять
Е (z
0
) я* Е и
переписать
(10.41)
(дА/да)
со
0
= 2Е.
(10.42)
Все введенные упрощения
в
(10.39),
как
правило, вполне
допустимы
для
современных регуляторов,
и для
вычисления
их
динамических констант можно пользоваться следующими про
стыми выражениями:
Т1
=
Mz
max
/26£;
(Ю.43)
Т
к
=
fz
max
/28E; (10.44)
k
= 1/в.
(10.45)
156
Если
же по
какимлибо причинам статические характеристики
значительно отличаются
от
прямых линий,
то
функцию
F (z)
следует вычислять
по
формуле
(10.40)
для
каждого исследуемого
режима
(z = z
0
).
Запишем
(10.39)
в
операторной форме
(Г*р*
+
Г
к
р+
\)х
г
= кх
а
.
(10.46)
Динамические константы. Чтобы понять физический смысл
времени регулятора
—
константы
Т
г
,
рассмотрим
свободные колебания вращающегося маятника
без
катаракта
(Т
к
= 0).
При
этом
х
а
= 0, так как со =
const,
и
(10.46)
примет
вид
1)^
= 0.
(10.47)
Выведем муфту
из
положения равновесия
и
предоставим
ей
возможность совершать свободные колебания около положения
равновесия.
Эти
колебания определятся интегралом уравнения
(10.47),
имеющим
вид
(7.15)
при
отсутствии демпфирования
(а
= 0)
x
z
= d cos (t/T
r
) + d sin
(t/T
r
).
(10.48)
Из
(10.48)
следует,
что
период колебаний
т
0
=
2пТ
г
,
ацикли
ческая частота
щ
=
2л/х
0
= \/Т
г
.
(Ю.49)
Итак, динамическая постоянная
Т
г
характеризует частоту
свободных колебаний регулятора.
Чтобы точно выполнять свои командные функции, регулятор
должен,
по
возможности
без
промедления, приводить
в
действие
систему регулирования, быстро реагируя
на
изменения регули
руемой величины.
Как и
любой прибор
для
точных измерений
в быстро меняющихся процессах, регулятор должен иметь
на
столько высокую частоту собственных колебаний, чтобы можно
было пренебречь замедлением изза влияния
его
массы
на
процесс
регулирования. Этому условию удовлетворяет регулятор,
для
которого
Т'г
та
0, а
это
достигается
при
весьма малых массах
и их
перемещениях,
но при
большой величине
ЬЕ, что
следует
из
(10.43).
Современные регуляторы,
как
правило, удовлетворяют этим
требованиям
и к
тому
же
для них
характерно малое сухое трение.
Если
в
системе регулирования отсутствует также катаракт
(Г
к
=
=
0), то
дифференциальное уравнение
(10.46)
может быть заме
нено алгебраическим
х
г
= kx
a
.
(Ю.50)
Регулятор, который
без
запаздывания следует
за
всеми изме
нениями регулируемой величины, будем называть
и д е а л ь
н
ы м.
157
Время катаракта
Т
к
и
время регулятора
Т
г
харак
теризуют логарифмический декремент коле
баний сст
0
, причем
(см.
(7.14))
a
= —
T
K
/2Tj.
(10.51)
Колебания системы второго порядка
с
демпфером были рас
смотрены
в § 9.4.
Касательные
и
кориолисовы силы инерции.
При
выводе урав
нения центробежного маятника
мы
пренебрегали касательными
и кориолисовыми силами инерции.
В
современных регуляторах
они действительно невелики
по
сравнению
с
центробежной силой
инерции.
Тем не
менее
они
имеют принципиальное значение,
в частности, можно доказать
[21
],
что
при
малых массах центро
бежного маятника
в
принципе эффект
от
кориолисовых
сил
может
заменить действие катаракта.
Регулятор давления. Рассмотрим регулятор поршневого типа
(см.
рис.
1.13),
предназначенный
для
поддержания
в
заданных
пределах давления
р
(см. рис. 10.6).
На
него действуют
две
силы:
регулирующая
,
сила
А (р) и
поддерживаю
щая
с и л а £
(г).
Регулирующая сила
для
данного регулятора
зависит только
от
давления
р, т. е.
A(p)
= pF,
(10.52)
где
F —
площадь поршня.
Характеристики этой силы
на
рисунке изображены
в
виде
прямых, параллельных
оси
абсцисс.
Поддерживающая сила создается натяжением пружины,
и
она зависит
от
координаты
z. Ее
характеристика
на
рисунке пред
ставлена
в
виде наклонной прямой, выраженной уравнением
E(z)
= R
0
+ cz,
(10.53)
где
R
0
—
сила пружины
при z = 0; с —
жесткость пружины.
В положении равновесия
Е (z
0
) = А (р
0
) = Fp
0
.
Из
(10.52)
и
(10.53)
найдем:
dA
(p)/dp
= F; dE
(z)/dz
= с;
IdA (p)ldp\
p
0
= Fp
0
= E (z
0
) fa E,
где
E —
средняя величина поддерживающей силы.
Заметим,
что при
линейной характеристике
Е (z)
можно
за
писать равенство
C^max
=
•Е'шах
Е
т[п
= А
(/7щах)
A
(Pmin)>
ГДе
Е
т1п
, р
т1п
И
^тах,
Ртах ОТНОСЯТСЯ
К
КООрДИНЭТЭМ
Z = 0 И
2
z
max
.
Следовательно, согласно
(10.53)
и рис. 10.6
сг
шах
/£
=
(£
гаах
— E
mln
)/E
= F
(р
та
.х~
Pmm)/E
= Qw
—
р
т
ш)/Ра
= 6.
158
Уравнение регулятора давления составим
на
базе закона Ньютона,
как и
уравнение центробежного маятника
(10.38)
Mz
awx
x
z
= (dA
(p)/dp)
р
0
х
р
—
(dE
(z)/dz)
z
max
x
z
—
fz
max
x
t
.
Поделив
все
члены этого уравнения
на (dE
(z)ldz)
z
max
=
cz
max
,
преобразуем
его к
точно такой
же
форме,
как и
(10.39),
Т\х
г
+
T
K
x
z
+ x
t
= kx
p
,
(10.54)
где
Т\ =
Mz
m
Jcz
imK
=
Mz
m
JbE;
Т
к
=
fz
m
JbE;
k =
E/cz
max
=
=
1/6.
Константы
Tj и Т
к
в
(10.43)
и
(10.44)
были
в
два
раза меньше,
чем
в
(10.54),
так как
регулирующая сила
в
центробежном маят
нике пропорциональна второй степени,
а в
регуляторе давления
—
первой степени
от
регулируемой величины.
Уравнение
(10.54)
можно применять также
для
регуляторов
мембранного типа.
В
этом случае
в
(10.52)
надо ввести коэффициент
активной площади мембраны
а
(см.
§ 1.3), т. е.
принять
Е (z
c
) =
= aFp
0
.
Той же
величине равна регулирующая сила
А (р
0
),
и коэффициент
а
учитывается лишь
при
определении жесткости
упругой системы.
При определении приведенной
к
координате
z
массы необходимо
учитывать
не
только
все
массы, рычажно связанные
со
штоком
ре
гулятора,
но и
массы жидкости, следующие
за
поршнем
или
мембра
ной регулятора. Приведение массы
и в
этом случае производится
по сумме живых
сил. При
этом если
в
трубке импульсной линии
(рис.
1.13) с
живым сечением
/
тр
находится вода,
то ее
скорость
движения
в F //
тр
раз
больше,
чем
поршня, имеющего активную
площадь
F, и
коэффициентом приведения будет
(F/f
Tp
)
2
.
Таким
образом,
при
малом диаметре трубки
и
значительной массе воды
приведенная
к
координате
z
масса может играть большую роль.
§
10.4.
УРАВНЕНИЯ СЕРВОМОТОРОВ
С
ОТСЕЧНЫМИ ЗОЛОТНИКАМИ
В автоматических системах регулирования паровых
и газовых турбин применяются весьма разнообразные конструкции
сервомоторов
и
усилителей
(см.
гл. 2).
Изучая динамику регули
рования, сервомоторы будем классифицировать
по
отличительным
признакам
их
золотников: отсечных
и
дроссельных.
В идеализированной модели сервомотора
с
отсечным золот
ником
в
положении равновесия окна золотника полностью
за
крыты
(s = 0), и это
придает
ей
динамические свойства, сущест
венно отличающиеся
от
модели сервомоторов
с
дроссельными
золотниками,
где
сквозь золотник постоянно протекает значи
тельное количество рабочей жидкости. Математическая модель
сервомотора
с
отсечными золотниками,
как
правило, может быть
представлена апериодическим звеном
с
пренебре
159