Кириллов И.И. Автоматическое регулирование паровых турбин и газотурбинных установок
Подождите немного. Документ загружается.

системы становятся равными
по
величине
и
обратными По знаку
их значениям
в
исходном положении
при
/ = 0.
Эт<? "Утверж-
дает
и
первое
из
уравнений
(14.26),
представляющее
с
°бо
и
мас-
штаб выходной величины
из
цепи звеньев
по
сравнение
с
Годной.
В замкнутой системе
эти
величины отличаются лй
шь
Знаком.
Передаточная функция
для
рассматриваемой Р
азо
Мкнутой
системы регулирования
без
запаздывания находится
из
уравне-
ний
(14.22)—(14.24) при
е = 0
W (s)
=
(1/6)
(T
s
s +
I)"
1
(T„s)-\
(14.27)
а частотная характеристика имеет
вид
W (ко)
= -
(67»-'
(7>
+
i)/(TW
+
1). (14.28)
Из этого уравнения определяется амплитудная хар#
кте
Рцстика
А (со)
=
(6Т
а
(о)~
1
(TW +
I)"
0,5
.
(14.29)
Критическая частота вычисляется
из (14.28)
после ^
ОДс
Тановки
А
(со)
= 1
с4
=
Р,577
2
{-
1
+ V1 +
4 (Ts/(bT
a
))
2
}. (14.30)
Фазовая характеристика находится
из
уравнения
('4.27)
8 (со)
=
arctg
[V
(w)/U (со) ]
-
arctg
(7»"*-
(14.31)
Подставив
в
(14.31)
найденную
из (14.30)
критическУ
ю
Частоту,
получим значение фазовой характеристики
0
(со
к
). ^°Следняя
в сочетании
с
(14.26)
послужит
для
определения кр
ит
И({
еского
времени запаздывания
т
к
.
Звено запаздывания согл#
сн
о
(13.73)
поворачивает вектор
W (ш)
на
угол т
3
со
в
сторону 1*Р
Иг
Ической
точки,
что
снижает запас устойчивости. Вредно вли#
ют
и
оста-
новки муфты,
не
учтенные запаздыванием. Интегрирующее звено,
смещающее
W(tco)
влево, повышает восприимчивости
С11
Стемы
к
автоколебаниям.
Все это
приводит
к
выводу: регуля
Т0
Р должен
быть высокочувствительным.
Из (14.30)
следует,
что
с
Уменьше-
нием времени сервомотора
Т
я
, а
также
с
увеличением:
К0
Мплекса
Tj(8T
a
)
критическая частота
со
к
растет.
Критерии автоколебаний. Выполненный анализ
0
"которой
мере проясняет процесс регулирования, частоту авто^
ол
бб
ании
и
влияние
на них
параметров системы, особенно комплеК
са
^
8
/(бТ
а
).
Но надо иметь
в
виду,
что
моделируется процесс регУ
л
ир
ования
с остановками муфты
при
изменении направления Д
ви
^ния
и
что
это
вызывает
уже
указанные выше особенности
прСЦ
е
Сс
а
после
пересечения клапаном нового положения равновесия.
[Лта^
вьшол
.
ненная линеаризация приводит лишь
к
грубому прибЛ
и
>Не
нию
В
§
11.1
было доказано,
что для
системы регулиров
ани
я, вклю-
чающей апериодическое звено
(в
нашей системе
—
се
Р
й
омотор)
и интегрирующее звено
(у
нас
—
ротор турбины), пер
вы
й размах
под влиянием сброса нагрузки заканчивается
при
гпоМ
ж
е
откло-
нении регулируемой величины
х
а
от
положения рав№
ве
сц
я
^
как
260
моянии
при
нулевых начальных
II
в
UCXOOHOM
СОС'
\ /
,
„„х—
—X<aJ
При
иСЛОвии
(СМ.
параметрах
(х
а
|1IJX 1
"
v
рис.
11.4)
'
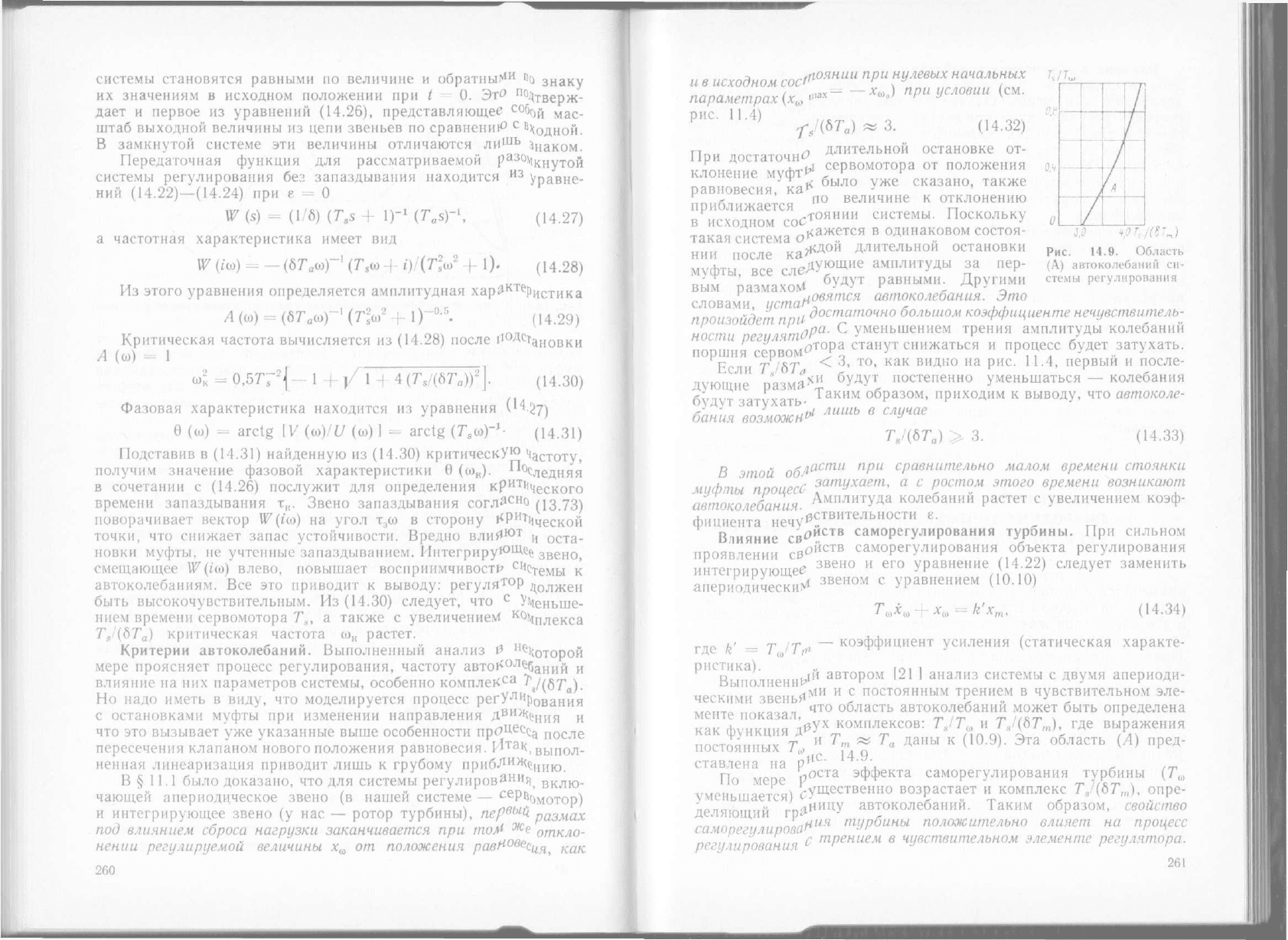
fJ{&T
a
)
« 3.
(14.32)
При достаточна Дательной остановке
от-
j^hi
сервомотора
от
положения
клонение муфтр
л
р F
J
^
ti
было
уже
сказано, также
равновесия, ка*
4
J
v
* по
величине
к
отклонению
приближается
,-,
^тоянии системы. Поскольку
в исходном
соС
}
,„ „кажется
в
одинаковом состоя-
такая система
„
нии после ка*
дои
Д
л
«
тель
нои остановки
муфты,
все
слеДУ
ющие
амплитуды
за пер-
J
\
,
будут равными. Другими
вым размахом
F
к
^
J
„
„
г
иовятся автоколебания.
Это
словами, цстаг-^
, , ,
"д
п ,i
достаточно большом коэффициенте нечувствитель-
ности регулятОР
а
-
С
уменьшением трения амплитуды колебаний
о
'
А
3,0
*,0Г,/(8Т
П
)
Рис.
14.9.
Область
(А)
автоколебаний
си-
стемы
регулирования
поршня сервоМ^Р
3 стан
У
т
снижаться
и
процесс будет затухать.
Если
TlbT
^ ^'
то
'
как
видко
на
Р
ис
- 11-4,
первый
и
после-
дующие размз*
и будут постепенно
уменьшаться
—
колебания
будут затухать-
Таким
образом, приходим
к
выводу,
что
автоколе-
JL
, ' ,и
лишь
в
сличав
бания возможна
У
Т
а
'(ЬТ
а
)
(14.33)
В этой
обЛ
асти
п
Р
и
с
Р
авнительн0
малом времени стоянки
миФты
п
оиесС
зат
У
хает
>
а с
ростом этого времени возникают
автоколебания Амплитуда колебаний растет
с
увеличением коэф-
.
,,,,
'
«ствительности
е.
фициента нечу
р
„
, „
В
я и
св^
иств
само
Р
ег
У
ли
Р
ования
турбины.
При
сильном
r-аОЙств
саморегулирования объекта регулирования
интегрирующее
звено
и его
уравнение
(14 22)
следует заменить
ф
звеном
с
уравнением
(10.10)
апериодически
k'x„
(14.34)
h'
— т /г , —
коэффициент усиления (статическая характе-
где
к — 1
а/1
ft
1
ристика).
„
го
, ,
R
t
,r,XT,„
Q
„4t,iH
автором
121
1 анализ системы
с
двумя апериоди-
о
ы п
О Л
НСНН
"
ческими звень^
1
^
и с
постоянньм
трением
в
чувствительном
эле-
.„„.„'
„,,аоа
П
что
область автоколебаний может быть определена
Meiiie показал,
^
!т
//СФ
\
как функция
д^ух
комплексов:
ТДи
T
s
/(&T
m
)
где
выражения
постоянных
Т
а
и
\<"
Т
«
даны
к
(
10
-
9
)'
Эта
область
^
п
Р
ед
"
ставлена
на
р^
с
'
9
,
л
,„
По мере
р
оСта
э
ФФ
екта
саморегулирования турбины
(Т
ю
уменьшается) сУ
щественно
возрастает
и
комплекс
Tj(bT
m
),
опре-
деляющий гр2
ниц
У
автоколе
баний. Таким образом, свойство
само е^илиповй^
ия т
Урбины положительно влияет
на
процесс
n0
o,H.,}!
na
JL,,
a
С
трением
в
чувствительном элементе регулятора.
fjcolf
ЛЫ
pOBQHllH
261
Влияние выключающего действия сервомотора. Выше прове-
дено исследование с обычным сервомотором, представленным
апериодическим звеном. Однако с целью упрощения в некоторых
системах регулирования применялись сервомоторы без обратной
связи. В таких случаях сервомотор действует как интегрирующее
звено. При этом сервомотор после пересечения положения равно-
весия (оси О/ на рис. 14.8) продолжает двигаться с максималь-
ной скоростью в течение всего времени стоянки муфты. В резуль-
тате сильно возрастает перерегулирование и расширяется область
автоколебаний.
Работоспособность такой системы всецело зависит от степени
саморегулирования объекта регулирования. Если она пренебре-
жимо мала, то система превращается в неустойчивую цепь из двух
интегрирующих звеньев. Если эти свойства слабые, то и небольшой
коэффициент нечувствительности е может вызвать автоколе-
бания.
Из этих соображений следует, что даже в тех случаях, когда
в линейной системе по условиям устойчивости в принципе можно
применить сервомотор без выключателя, необходимо тщательно
проверить поведение систе'мы с учетом важнейших элементов не-
линейности. И прежде всего следует убедиться в том, что си-
стема не попадает в область автоколебаний из-за трения в ее
элементах.
ГЛАВА
15. ОСОБЕННОСТИ СИСТЕМ
ГИДРОДИНАМИЧЕСКОГО И ЭЛЕКТРИЧЕСКОГО
РЕГУЛИРОВАНИЯ
Для регулирования хода турбин длительное время
применялся в основном тихоходный центробежный маятник. Раз-
мещался он обычно на особом валу вместе с насосами для смазки
и для нагнетания жидкости при высоком давлении в силовую си-
стему сервомоторов. Этому вспомогательному механизму пере-
давалось вращение от вала турбины через червячную или зубчатую
передачу. Ее быстрый износ доставлял много забот и побуждал
искать принципиально новые решения. С одной стороны, постав-
ленная задача решалась созданием совершенного быстроходного
центробежного маятника, с приводом непосредственно от глав-
ного вала турбины. Этим путем неуклонно шел ЛМЗ и, безусловно,
достиг больших успехов (см. § 1.4). С другой стороны, альтерна-
тивное решение было найдено в результате замены традиционного
маятника центробежным насосом в сочетании с чувствительным
элементом, измеряющим давление нагнетаемой жидкости. Рабо-
чее колесо насоса непосредственно присоединялось к главному
валу, не требуя передачи.
262
Гидродинамическое регулирование было
предложено двух типов: с общим центробежным насосом как для
формирования регулируемого параметра по частоте вращения, так
и для маслоснабжения всей установки; с выделенным импульсным
насосом, передающим только сигналы по частоте вращения.
Первое направление 120 ] было принято на ЛКЗ. Второе направле-
ние широко развивалось, особенно благодаря трудам ВТИ при
руководящем участии проф. В. Н. Веллера [6]. Сейчас гидроди-
намические системы регулирования входят в состав многих
паровых и газовых турбин ХТГЗ, УТМЗ, НЗЛ и КТЗ.
Электрические системы регулирова-
ния — это принципиально новое направление в турбостроении,
как отмечалось в § 2.7 и 14.2. При современных технических
средствах такое решение проблемы представляется вполне реаль-
ным и наиболее совершенным.
§ 15.1. ХАРАКТЕРИСТИКИ НАСОСОВ
Для регулирования хода турбин можно использовать
как центробежный насос, так и зубчатый. Последний применялся
редко.
Центробежный насос можно применять с рабо-
чими колесами различных типов: с радиальными отверстиями
в дисках, с радиальными лопастями, а также с загнутыми назад
или вперед лопастями у периферии. Если бы рабочее колесо на-
соса вращалось в закрытой камере при отсутствии расхода жидкос-
ти,
то изменение разности давления Ар в камерах нагнетания
и всасывания происходило бы пропорционально квадрату угло-
вой скорости, т. е.
где а — постоянная величина. Это изменение давления можно
использовать в качестве сигнала, передаваемого регулятору
давления и далее с помощью передаточного механизма и
сервомотора — к распределительным органам турбины. В этом
сяучае действие регулятора давления совместно с насосом вполне
аналогично действию центробежного маятника. Если же после
насоса жидкость отводится, то в зависимости от ее расхода Q ме-
няется и давление в камере нагнетания. Для каждой частоты вра-
щения это давление нагнетания устанавливается в соответствии
с характеристикой насоса и характеристикой сети, точка пере-
сечения которых и определяет рабочий режим. При проектирова-
нии системы регулирования конструктор имеет возможность
влиять как на характеристику насоса, так и на характери-
стику сети.
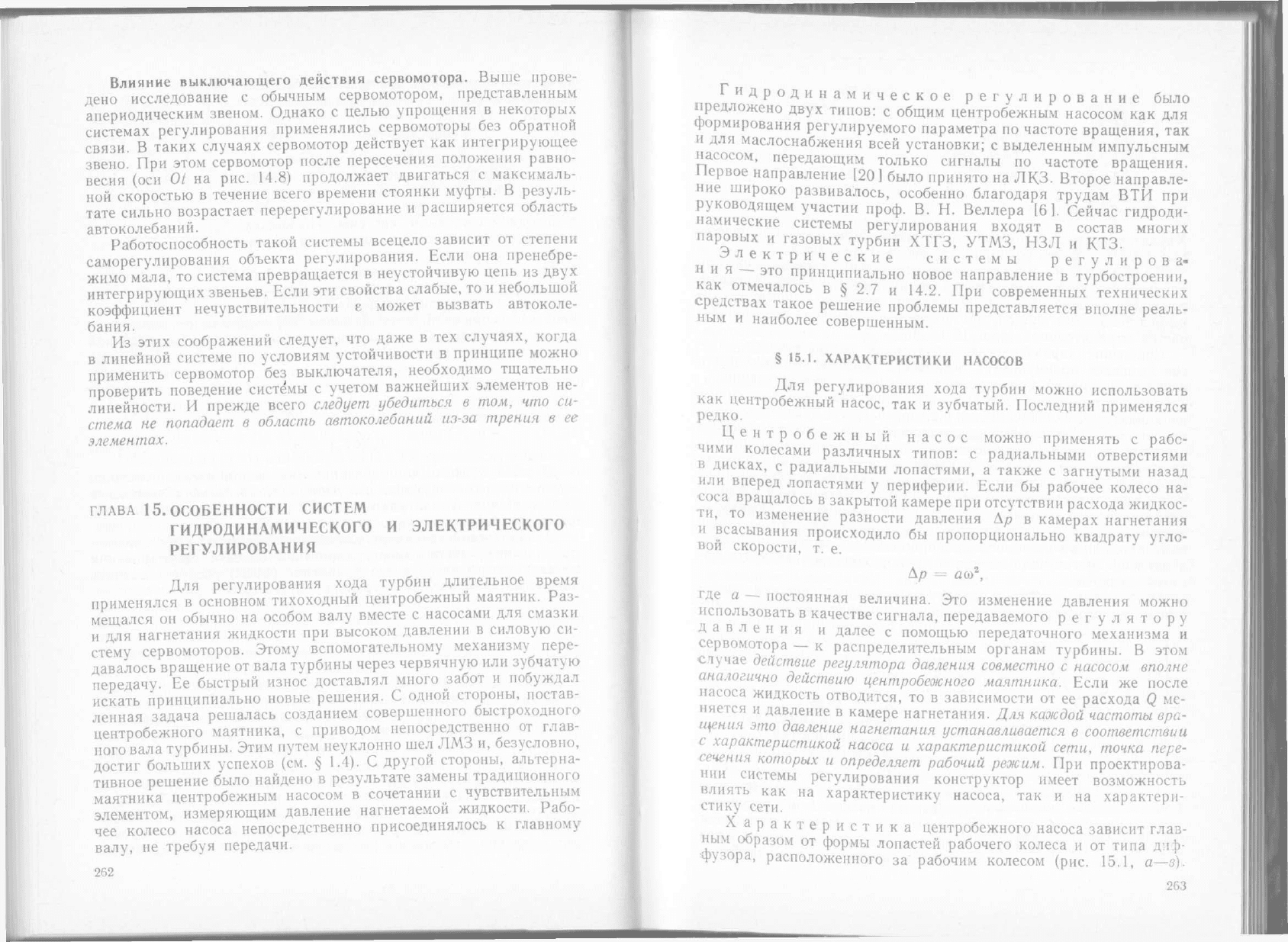
Характеристика центробежного насоса зависит глав-
ным образом от формы лопастей рабочего колеса и от типа диф-
фузора, расположенного за рабочим колесом (рис. 15.1, а—з).
263
о)
s)
а
и a a
Рис.
15.1. Характеристики насосов
Характеристика в основной своей части обычно имеет производ-
ные
dQIdH
< О, но возможны dQidH > 0 (рис. 15.1, в).
Зубчатый насос при отсутствии утечек давал бы
характеристику в виде вертикальной линии. Утечки, увеличи-
вающиеся по мере возрастания давления, придают характеристике
насоса некоторый наклон, при котором производная dQldH полу-
чается отрицательной (рис. 15.1, г).
Сравнение характеристик зубчатого и центробежного насо-
сов выясняет преимущества последнего там, где выгодно иметь
возрастание расхода жиДкости в случае падения давления.
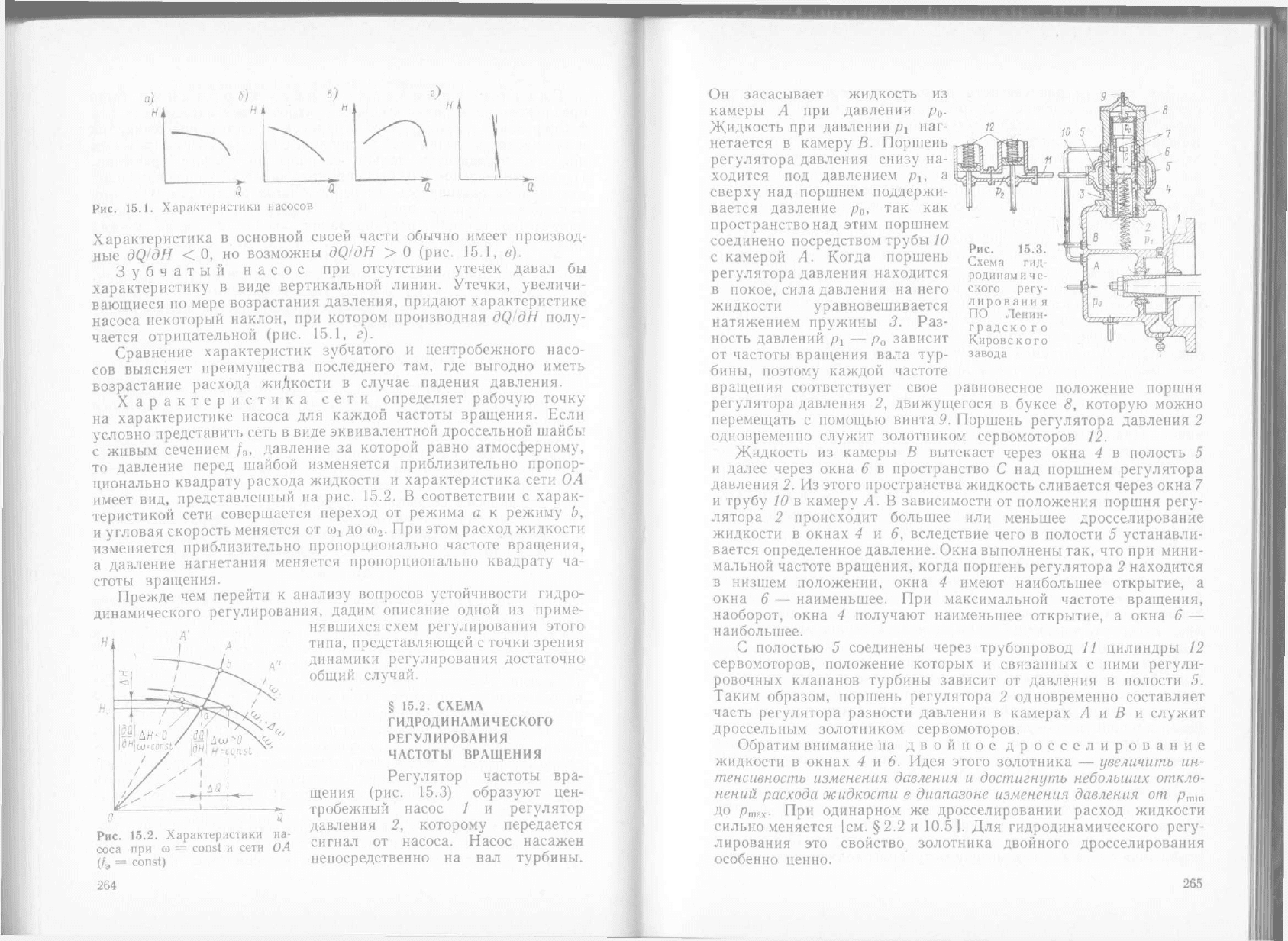
Характеристика сети определяет рабочую точку
на характеристике насоса для каждой частоты вращения. Если
условно представить сеть в виде эквивалентной дроссельной шайбы
с живым сечением /
э
, давление за которой равно атмосферному,
то давление перед шайбой изменяется приблизительно пропор-
ционально квадрату расхода жидкости и характеристика сети OA
имеет вид, представленный на рис. 15.2. В соответствии с харак-
теристикой сети совершается переход от режима а к режиму Ь,
и угловая скорость меняется от со, до со
2
. При этом расход жидкости
изменяется приблизительно пропорционально частоте вращения,
а давление нагнетания меняется пропорционально квадрату ча-
стоты вращения.
Прежде чем перейти к анализу вопросов устойчивости гидро-
динамического регулирования, дадим описание одной из приме-
нявшихся схем регулирования этого
типа, представляющей с точки зрения
динамики регулирования достаточно
общий случай.
§
15.2. СХЕМА
ГИДРОДИНАМИЧЕСКОГО
РЕГУЛИРОВАНИЯ
ЧАСТОТЫ
ВРАЩЕНИЯ
Регулятор частоты вра-
щения (рис. 15.3) образуют цен-
тробежный насос 1 и регулятор
давления 2, которому передается
с
Р
ос
С
а „%
2
-
ш
Х
1
Р
ЗГсГи OA сигнал от насоса. Насос насажен
(/ =
const)
непосредственно на вал турбины.
264
Он засасывает жидкость из
камеры А при давлении р
0
.
Жидкость при давлении р
х
наг-
нетается в камеру В. Поршень
регулятора давления снизу на-
ходится под давлением р
и
а
сверху над поршнем поддержи-
вается давление р
0
, так как
пространство над этим поршнем
соединено посредством трубы 10
с камерой А. Когда поршень
регулятора давления находится
в покое, сила давления на него
жидкости уравновешивается
натяжением пружины 3. Раз-
ность давлений р
х
— р
0
зависит
от частоты вращения вала тур-
бины, поэтому каждой частоте
вращения соответствует свое равновесное положение поршня
регулятора давления 2, движущегося в буксе 8, которую можно
перемещать с помощью винта 9. Поршень регулятора давления 2
одновременно служит золотником сервомоторов 12.
Жидкость из камеры В вытекает через окна 4 в полость 5
и далее через окна 6 в пространство С над поршнем регулятора
давления 2. Из этого пространства жидкость сливается через окна 7
и трубу 10 в камеру А. В зависимости от положения поршня регу-
лятора 2 происходит большее или меньшее дросселирование
жидкости в окнах 4 и 6, вследствие чего в полости 5 устанавли-
вается определенное давление. Окна выполнены так, что при мини-
мальной частоте вращения, когда поршень регулятора 2 находится
в низшем положении, окна 4 имеют наибольшее открытие, а
окна 6 — наименьшее. При максимальной частоте вращения,
наоборот, окна 4 получают наименьшее открытие, а окна 6 —
наибольшее.
С полостью 5 соединены через трубопровод 11 цилиндры 12
сервомоторов, положение которых и связанных с ними регули-
ровочных клапанов турбины зависит от давления в полости 5.
Таким образом, поршень регулятора 2 одновременно составляет
часть регулятора разности давления в камерах А и В я служит
дроссельным золотником сервомоторов.
Обратим внимание на двойное дросселирование
жидкости в окнах 4 и 6. Идея этого золотника — увеличить ин-
тенсивность изменения давления и достигнуть небольших откло-
нений расхода жидкости в диапазоне изменения давления от р
т{п
До
Ртах-
При одинарном же дросселировании расход жидкости
сильно меняется [см. §2.2 и
10.5].
Для гидродинамического регу-
лирования это свойство золотника двойного дросселирования
особенно ценно.
Рис.
15.3.
Схема
гид-
родинамиче-
ского
регу-
лирован
и я
ПО
Ленин-
градско
г о
Кировского
завода
265
Для каждого равновесного положения золотника, соответ-
ствующего определенной частоте вращения, можно построить
характеристику сети, аналогичную представленной
на рис. 15.2.
Каждая такая характеристика сети пересечет соответствующую
характеристику насоса
в
одной точке, которую назовем рабо-
чей точкой. Совокупность рабочих точек образует рабо-
чую линию, охватывающую
все
равновесные положения
си-
стемы регулирования.
В
процессе регулирования характеристика
сети постоянно изменяется.
Если
бы
вместо окон дроссельного золотника
2
была преду-
смотрена дроссельная шайба
с
неизменным живым сечением
и по-
стоянным противодавлением,
а к
сервомоторам жидкость подво-
дилась
бы от
особого насоса,
то
характеристика сети
при
всех
режимах оставалась
бы
одной
и той же и
рабочая линия изобра-
жалась
бы
отрезком этой характеристики сети
(ab на рис. 15.2).
Если
бы
золотник
2
имел только один
ряд
окон, сквозь кото-
рые жидкость притекала
бы в
полость
5, а
вместо второго ряда
окон была
бы
предусмотрена дроссельная шайба
с
неизменным
живым сечением, сквозь которую жидкость вытекала
бы из по-
лости
5, то
наибольшей частоте вращения соответствовало
бы
меньшее открытие окон,
чем в
золотнике двойного дросселиро-
вания.
При
этом характеристика сети
OA' за
счет возрастания
сопротивления
в
тракте переместилась
бы в
область малых расхо-
дов.
Меньшей
же
частоте вращения, наоборот, отвечало
бы
боль-
шее открытие окон золотника
2, и
характеристика сети
А" для
этих режимов переместилась
бы в
область больших расходов
жидкости.
При
этом рабочая линия была
бы
расположена между
двумя крайними характеристиками сети
А' и А".
Вместе
с тем для
того, чтобы время сервомотора было доста-
точно мало,
в
схеме
с
одинарным золотником расход жидкости
сильно менялся
бы
между крайними режимами работы,
как это-
было показано
на
примере
в § 10.5. А это
значит,
что
крайние
характеристики сети оказались
бы на
значительном расстоянии
друг
от
друга,
а
рабочие точки пришлись
бы на
различные
по
форме участки характеристики насоса
(см. рис. 15.2).
Если
же
выполнен золотник двойного дросселирования
(см.
рис.
15.3), то
конструктор имеет возможность осуществить серво-
мотор
с
достаточно малым временем
при
малом изменении расхо-
дов жидкости
на
двух крайних равновесных режимах работы тур-
бины,
а в
принципе
—
даже
при
отсутствии такого изменения
(см.
§
10.5).
Другими словами,
в
такой схеме регулирования крайние
характеристики сети могут быть сближены,
а
рабочую линию
можно получить самой разнообразной формы.
Из
сказанного
следует, что
золотник двойного дросселирования
играет важную роль
как в
формировании оптимальной рабочей
линии,
так и в
снижении расхода жидкости.
Для изменения частоты вращения
в
схеме
на рис. 15.3
служит
подвижная букса
8.
Если мощность турбины должна быть сохра-
266
нена неизменной,
а
следовательно,
и
регулировочные клапаны
должны остаться приблизительно
в
одном
и том же
положении,
но
частоту вращения требуется несколько уменьшить,
то
буксу
следует сместить вниз. Тогда прежнее открытие окон золотника,
необходимое
для
удержания регулировочных клапанов прибли-
зительно
в
прежнем положении, будет достигнуто
при
меньшей
частоте вращения. Смещение буксы золотника вверх, наоборот,
вызовет повышение частоты вращения. Таким образом,
с по-
мощью буксы
8
рабочая точка перемещается
с
одной характери-
стики насоса
на
другую, тогда
как
характеристика сети остается
неизменной.
Для того чтобы изменять коэффициент неравномерности
в ши-
роком масштабе, могут быть установлены особые переставляемые
золотники, меняющие количество подводимой
в
трубопровод
11
и отводимой
из
него жидкости.
С
помощью таких золотников
можно произвольно менять живые сечения нагнетательных
и
сливных окон,
что
приводит
к
изменению характеристики сети,
а следовательно,
и к
изменению коэффициента неравномерности
(см.
§ 3.6).
Коэффициент неравномерности можно было
бы
также
менять путем изменения жесткости пружины
3, а для
этого
до-
статочно увеличивать
или
уменьшать число рабочих
ее
витков
с помощью специального приспособления.
Выбор рациональной схемы гидродинамического регулирова-
ния связан
с
решением ряда принципиальных задач динамики
регулирования,
в
частности,
— с
выбором благоприятных
для
процесса регулирования характеристики насоса
и
характеристик
сети. Ниже даны некоторые сведения
о
решении этих задач
по
источнику
1
[21 ].
§
15.3.
ГИДРОДИНАМИЧЕСКОЕ РЕГУЛИРОВАНИЕ
Поставим задачу выявить особенности системы гидро-
динамического регулирования
по
сравнению
с
адекватной
по на-
значению системой,
но с
механическим регулятором.
Для
этого
прежде всего необходимо построить математическую модель гидро-
динамического регулятора.
В
состав регулятора частоты враще-
ния,
как уже
было сказано, входят насос
и
регулятор давления,
поршень
2
которого является
и
золотником сервомоторов
(см.
рис.
15.3).
Уравнение регулятора. Допустим,
что
массы золотника, пру-
жины
и
жидкости, увлекаемой поршнем
2,
малы
по
сравнению
с поддерживающей силой регулятора (силой пружины
3) и что
влиянием
их на
движение золотника можно пренебречь.
В
этом
предположении задача сводится
к
рассмотрению аккумулятора
переменной емкости
(см. § 10.2 и 10.5).
В нашем случае жидкость несжимаемая,
и
уравнение движе-
ния поршня
2
получим
из (10.29),
положив
р = const и
заменив
массовый расход
на
объемный
=
AQi - AQ«, (15.1)
267
где
F
s
—
активная площадь поршня
2; x
s
—
ход
золотника,
совмещенного
с
поршнем;
Q
x
—
объемная производительность
насоса;
Q
2
—
объемный расход жидкости
из
камеры
В
под
золот-
ником.
Давление жидкости перед входом
в
насос, вообще говоря,
мо-
жет меняться
во
время процесса регулирования
и это
просто
учесть,
но
для
упрощения записи примем давление
р
0
в
камере
А
неизменным.
При
этом условии расходы жидкости можно пред-
ставить функциями:
Qi
=
/1
(<•>.
Pi); Qi =
/2
(s,
Pi, Pi),
где
со
—
частота вращения ротора;
р
х
—
давление
под
поршнем
золотника
2; р
2
—
давление
за
окнами золотника
в
камере
и под
поршнем сервомоторов
12.
Эти функции,
как
обычно, разложим
в
ряды:
AQ
1
=
(dQ,/dto)
Аш
+
(dQJdpd
Ар,;
(15.2)
AQ.
2
(dQJds)
As
+
(dQJd
Pl
)
A
Pl
+
(dQ
2
/dp,,)
Ap
2
.
(15.3)
Изменения давлений
/?, и p.,
выразим через характерные
для
данной системы координаты: перемещения поршней золотника
(s)
и сервомотора
(т),
которые обязательно войдут
и в
уравнения
других звеньев:
Ар
1
=
(cjF
s
)
As;
Ар
2
=
(c
m
/F
m
)
Am,
(15.4)
где
c
s
и с
т
—
жесткости пружин золотника
(2) и
сервомотора
(12)
(см.
рис. 15.3);
F
a
и F
m
—
активные площади поршней золотника
и сервомотора.
Последние выражения перепадов давления подставим
в
(15.2),
(15.3)
и
перейдем
к
относительным переменным
х
ш
для
частоты
вращения,
x
s
для
золотника
и х
т
для
сервомотора, взяв
за
мас-
штабные взаимосвязанные величины угловую скорость
со
0
и
максимальные рабочие ходы
s
max
и
m
raax
.
В
результате подстано-
вок уравнение
(15.1)
примет
вид:
F
s
s
m
axX
s
=
(dQx/dco)
щх
а
—
(dQz/др!
—
dQjdpi) (c
s
/F
a
)s
ma
.
x
x
s
-
—
(dQi/ds)
s
mas
x
s
—
(dQ
2
/dp
2
) (c
m
/F
m
)
m
mm
x
m
.
(15.5)
Введем
в
(15.5)
динамическую константу
7
S]
—
время золотника
как промежуточного сервомотора
в
механизме передачи сигнала
из камеры
В к
главным сервомоторам
12
T
sl
x
s
+ x
s
= kx
a
-+
k
m
x
m
,
(15.6)
где
T
sl
=
F
s
s
m
JQ
s
;
k =
(dQJda) v>
0
/Q
s
;
k
m
= —
(dQJdp*)
x
X
(c
m
/F
m
) m
m
JQ
s
;
Q
s
=
(dQ
2
/ds)
s
max
+
(dQ
2
/dpi
—
dQJdpi)
x
X
(c
s
/F
s
)
s
max
.
С математической точки зрения
T
sl
равносильно времени ката-
ракта
в
составе регулятора
с
пренебрежимо малой массой
[см.
(10.39)
при
Т
т
= 0].
По
физическому
же
смыслу
эта
динамическая
константа лучше отвечает времени промежуточного сервомотора,
268
получающего сигнал
от
насоса через камеру
В на
пути
его
сле-
дования
к
главным сервомоторам
12.
В знаменатель постоянной
Т
а1
и
коэффициентов
k и k
m
входит
величина
Q
s
—
это
определенное изменение объемного расхода
жидкости, протекающего сквозь золотник, вычисленное
для ра-
бочего хода золотника
s„
mx
по
параметрам исследуемого режима
работы.
Так что
сохраняет силу определение времени сервомо-
тора
Т
а
,
данное
к
формулам
(10.58)
и
(10.61).
Коэффициент уси-
ления
k
характеризует интенсивность изменения притока жидкос-
ти
в
камеру
А иод
влиянием отклонения частоты вращения.
Член
k,
n
x
m
имеет смысл дополнительного возмущения
под
влия-
нием хода главного сервомотора.
Характеристика насоса.
Она
играет ведущую роль
в
уравне-
нии
(15.6).
От нее
зависит производная
dQJdui.
Если
бы
сквозь дроссельный золотник
2
жидкость подавалась
не
из
камеры
В, а от
постороннего источника,
так что
Q
t
--
Q
2
=
const,
то k
m
0. В
такой схеме
не
передавались
бы
обратные
возмущения сервомотора
в
камеру
В к
золотнику,
и
коэффициент
усиления
k
имел
бы
смысл величины, обратной коэффициенту
неравномерности регулирования
б.
Важно заметить,
что к та-
кому
же
выводу
мы
приходим, если расход жидкости
из
камеры
не меняется
и Q
2
-
:
const.
А
как раз
к
решению этой задачи можно
приблизиться, применив золотник двойного дрос-
селировании
(см.
в §
10.5
разъяснения
к
(10.87)).
Золотник
двойного дросселирования
и
был
с
успехом использован
в
системе
регулирования, представленной
на
рис.
15.3.
Исследование всей системы
в
целом проводится
как
при
обыч-
ном регуляторе.
При
этом выявляется существенное влияние
как динамической константы
Т
я1
,
так
и
коэффициента усиления
k
m
.
§
15.4.
ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА
РЕГУЛИРОВАНИЯ
МЭИ
Схема регулирования
МЭИ
дана
на рис. 15.4 [50].
В качестве чувствительного элемента
на
валу турбины установлен
датчик частоты
(ДЧ).
Сигнал
от
него передается через преобразо-
ватель
(ПЧ)
к
суммирующему усилителю
(СУ).
К
тому
же
усили-
телю поступают сигналы
от
датчика положения
(ДП)
клапанов
и
задатчика
(ЗД)
их
открытия. Сигнал рассогласования
U
A
поступает
к
входу
в
релейный усилитель
(РУ)
мощности.
К
релей-
ному усилителю подводится также дополнительное пилообраз-
ное напряжение
от
генератора (ГПН). Модуляция сигнала рас-
согласования этим напряжением создает переменную скорость
перемещения клапанов
в
зависимости
от
величины рассогласова-
ния. Выходной сигнал
U
y
из РУ
передается реверсивному тири-
сторному преобразователю
(ТП),
формирующему команду элек-
тродвигателю
(ЭД) и
далее
—
регулировочным клапанам через
самотормозящуюся передачу
МП-1.
Самотормо-
269
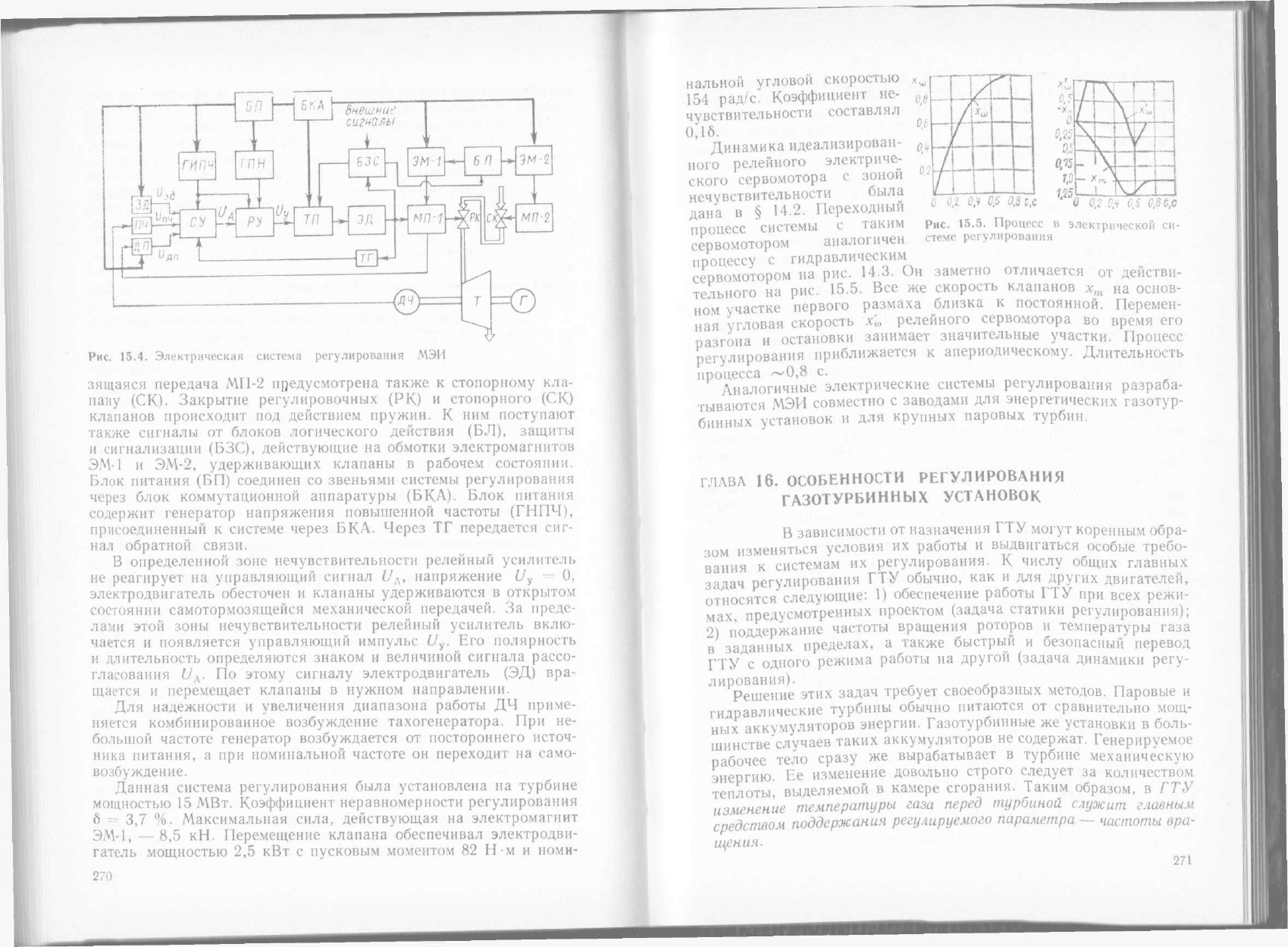
Рис.
15.4.
Электрическая система
регулирования
МЭИ
зящаяся передача
МП2
предусмотрена также
к
стопорному кла
пану
(СК).
Закрытие регулировочных
(РК) и
стопорного
(СК)
клапанов происходит
под
действием пружин.
К ним
поступают
также сигналы
от
блоков логического действия
(БЛ),
защиты
и сигнализации (БЗС), действующие
на
обмотки электромагнитов
Э.М1
и ЭМ2,
удерживающих клапаны
в
рабочем состоянии.
Блок питания
(БП)
соединен
со
звеньями системы регулирования
через блок коммутационной аппаратуры (БКА). Блок питания
содержит генератор напряжения повышенной частоты (ГНПЧ),
присоединенный
к
системе через
БКА.
Через
ТГ
передается сиг
нал обратной связи.
В определенной зоне нечувствительности релейный усилитель
не реагирует
на
управляющий сигнал
(У
л
,
напряжение
U
y
О,
электродвигатель обесточен
и
клапаны удерживаются
в
открытом
состоянии самотормозящейся механической передачей.
За
преде
лами этой зоны нечувствительности релейный усилитель вклю
чается
и
появляется управляющий импульс
U
y
. Его
полярность
и длительность определяются знаком
и
величиной сигнала рассо
гласования
(У
л
. По
этому сигналу электродвигатель
(ЭД)
вра
щается
и
перемещает клапаны
в
нужном направлении.
Для надежности
и
увеличения диапазона работы
ДЧ
приме
няется комбинированное возбуждение тахогенератора.
При не
большой частоте генератор возбуждается
от
постороннего источ
ника питания,
а при
номинальной частоте
он
переходит
на
само
возбуждение.
Данная система регулирования была установлена
на
турбине
мощностью
15
МВт. Коэффициент неравномерности регулирования
б
= 3,7 %.
Максимальная сила, действующая
на
электромагнит
Э.М1,
—8,5 кН.
Перемещение клапана обеспечивал электродви
гатель мощностью
2,5 кВт с
пусковым моментом
82 Им и
номи
270
нальной угловой скоростью
154 рад/с. Коэффициент
не
чувствительности составлял
0,16.
Динамика идеализирован
ного релейного электриче
ского сервомотора
с
зоной
нечувствительности была
дана
в § 14.2.
Переходный
процесс системы
с
таким
сервомотором аналогичен
процессу
с
гидравлическим
О
0,2
%Ч 0,S 0£t,e ''"0 i\2 C.S 0,86.0
Рис.
15.5.
Процесс
в
электрической
си
стеме регулирования
процессу
с
шдраш.,.
,^
сервомотором
на рис. 14.3. Он
заметно отличается
от
действи
тельного
на рис. 15.5. Все же
скорость клапанов
х
т
на
основ
ном участке первого размаха близка
к
постоянной. Перемен
ная угловая скорость
х'
ю
релейного сервомотора
во
время
его
разгона
и
остановки занимает значительные участки. Процесс
регулирования приближается
к
апериодическому. Длительность
процесса
~0,8 с.
Аналогичные электрические системы регулирования разраба
тываются
МЭИ
совместно
с
заводами
для
энергетических газотур
бинных установок
и для
крупных паровых турбин.
ГЛАВА
16.
ОСОБЕННОСТИ РЕГУЛИРОВАНИЯ
ГАЗОТУРБИННЫХ УСТАНОВОК
В зависимости
от
назначения ГТУ могут коренным обра
зом изменяться условия
их
работы
и
выдвигаться особые требо
вания
к
системам
их
регулирования.
К
числу общих главных
задач регулирования
ГТУ
обычно,
как и для
других двигателей,
относятся следующие:
1)
обеспечение работы
ГТУ при
всех режи
мах, предусмотренных проектом (задача статики регулирования);
2) поддержание частоты вращения роторов
и
температуры газа
в заданных пределах,
а
также быстрый
и
безопасный перевод
ГТУ
с
одного режима работы
на
другой (задача динамики регу
лирования).
Решение этих задач требует своеобразных методов. Паровые
и
гидравлические турбины обычно питаются
от
сравнительно мощ
ных аккумуляторов энергии. Газотурбинные
же
установки
в
боль
шинстве случаев таких аккумуляторов
не
содержат. Генерируемое
рабочее тело сразу
же
вырабатывает
в
турбине механическую
энергию.
Ее
изменение довольно строго следует
за
количеством
теплоты, выделяемой
в
камере сгорания. Таким образом,
в ГТУ
изменение температуры газа перед турбиной служит главным
средством поддержания регулируемого параметра
—
частоты вра
щения.
271
Указанные особенности
ГТУ
определяют
их
высокие
ма-
невренные качества.
Но это же
свойство
ГТУ
порождает опасность
чрезмерно резкого повышения параметров рабочего тела
во
время
переходных процессов.
В
связи
с
этим
в ГТУ
принимаются специ-
фические меры, предупреждающие динамические забросы темпе-
ратуры газа перед турбиной
и
давления газа
в
компрессоре.
§
16.1.
СПОСОБЫ РЕГУЛИРОВАНИЯ
ЧАСТОТЫ ВРАЩЕНИЯ
ГТУ
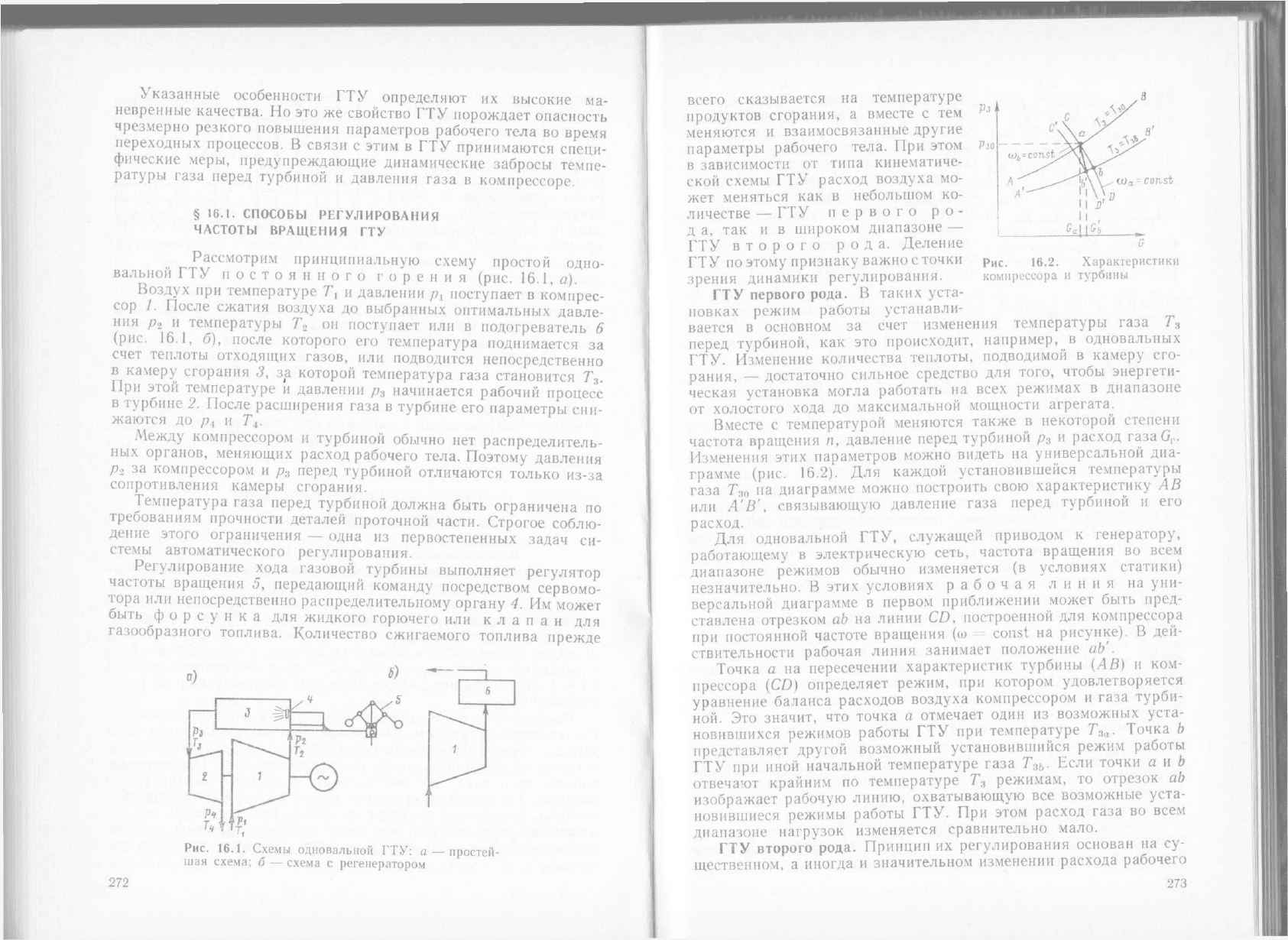
Рассмотрим принципиальную схему простой одно-
вальной
ГТУ
постоянного горения
(рис. 16.1, а).
Воздух
при
температуре
7\ и
давлении поступает
в
компрес-
сор
1.
После сжатия воздуха
до
выбранных оптимальных давле-
ния
р
2
и
температуры
Т
2
он
поступает
или в
подогреватель
6
(рис.
16.1, б),
после которого
его
температура поднимается
за
счет теплоты отходящих газов,
или
подводится непосредственно
в камеру сгорания
3, за
которой температура газа становится
Т
э
.
При этой температуре
и
давлении
р
3
начинается рабочий процесс
в турбине
2.
После расширения газа
в
турбине
его
параметры сни-
жаются
до р
х
и Г
4
.
Между компрессором
и
турбиной обычно
нет
распределитель-
ных органов, меняющих расход рабочего тела. Поэтому давления
р.,
за
компрессором
и р
я
перед турбиной отличаются только из-за
сопротивления камеры сгорания.
Температура газа перед турбиной должна быть ограничена
по
требованиям прочности деталей проточной части. Строгое соблю-
дение этого ограничения
—
одна
из
первостепенных задач
си-
стемы автоматического регулирования.
Регулирование хода газовой турбины выполняет регулятор
частоты вращения
5,
передающий команду посредством сервомо-
тора
или
непосредственно распределительному органу
4. Им
может
быть форсунка
для
жидкого горючего
или
клапан
для
газообразного топлива. Количество сжигаемого топлива прежде
Рис.
16.1.
Схемы одновальной
ГТУ:
«—простей-
шая схема;
б —
схема
с
регенератором
272
всего сказывается
на
температуре
продуктов сгорания,
а
вместе
с тем
Pj
"
с
меняются
и
взаимосвязанные другие
с
'\\о *s в'
параметры рабочего тела.
При
этом
PJO ^5<К
в зависимости
от
типа кинематиче-
Wi=const/\JJ\^
/
ской схемы
ГТУ
расход воздуха
мо- A"^2^^yCv^a)
e
=censt
жет меняться
как в
небольшом
ко- л'—
личестве
— ГТУ
первого
ро- J
в
'
д
а, так и в
широком диапазоне
— [
g
a
j|g^
ГТУ второго рода. Деление
*о
ГТУ поэтому признаку важно
С
ТОЧКИ
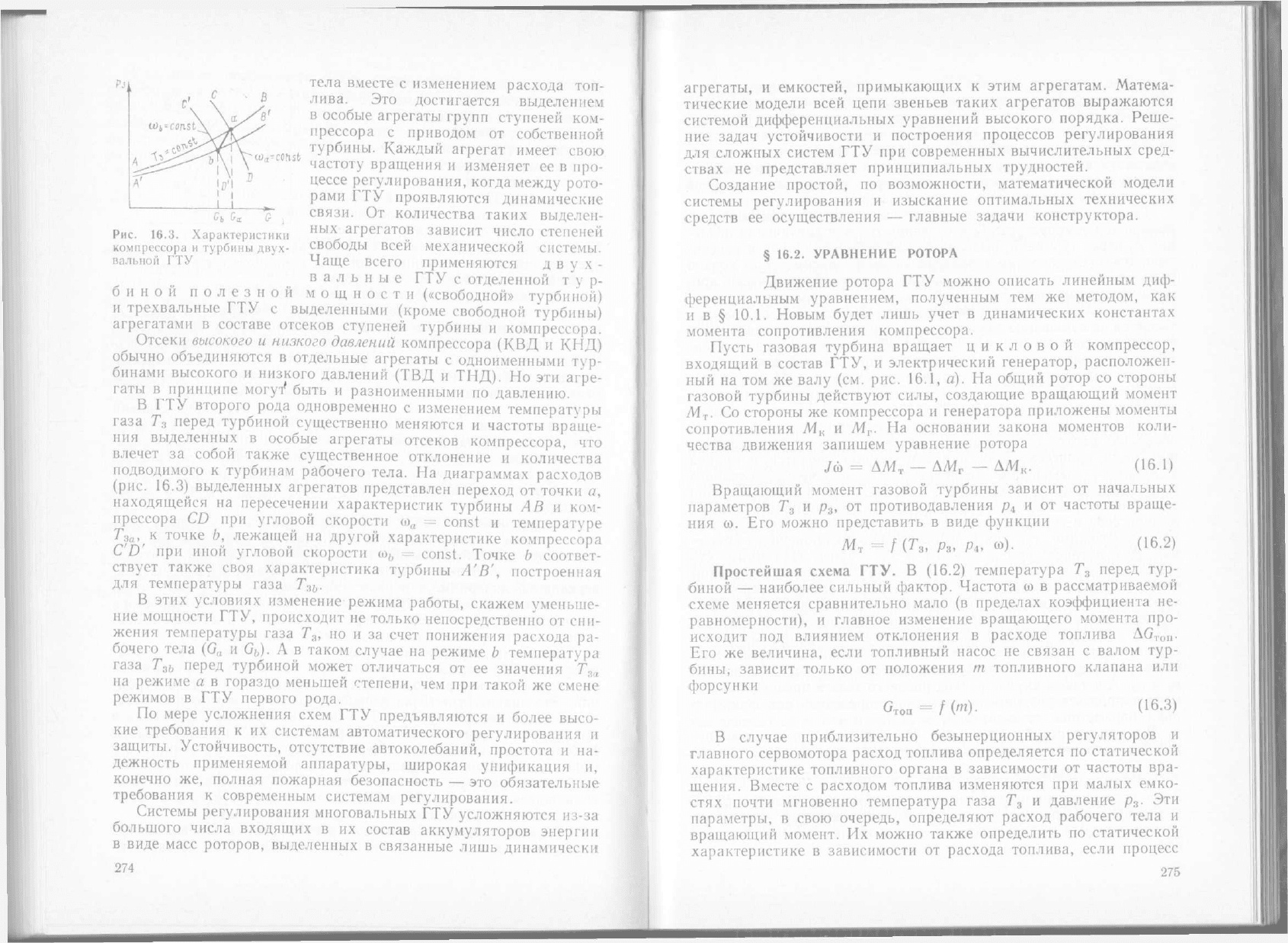
Рис
.
162
.
Характеристики
зрения динамики регулирования. компрессора
и
турбины
ГТУ первого рода.
В
таких уста-
новках режим работы устанавли-
вается
в
основном
за
счет изменения температуры газа
Т
3
перед турбиной,
как это
происходит, например,
в
одновальных
ГТУ. Изменение количества теплоты, подводимой
в
камеру сго-
рания,
—
достаточно сильное средство
для
того, чтобы энергети-
ческая установка могла работать
на
всех режимах
в
диапазоне
от холостого хода
до
максимальной мощности агрегата.
Вместе
с
температурой меняются также
в
некоторой степени
частота вращения
п,
давление перед турбиной
р
3
и
расход газаб,..
Изменения этих параметров можно видеть
на
универсальной диа-
грамме
(рис. 16.2). Для
каждой установившейся температуры
газа
Гзо на
диаграмме можно построить свою характеристику
АВ
или
А'В',
связывающую давление газа перед турбиной
и его
расход.
Для одновальной
ГТУ,
служащей приводом
к
генератору,
работающему
в
электрическую сеть, частота вращения
во
всем
диапазоне режимов обычно изменяется
(в
условиях статики)
незначительно.
В
этих условиях рабочая линия
на
уни-
версальной диаграмме
в
первом приближении может быть пред-
ставлена отрезком
ab на
линии
CD,
построенной
для
компрессора
при постоянной частоте вращения
(со const на
рисунке).
В
дей-
ствительности рабочая линия занимает положение
ab'.
Точка
а на
пересечении характеристик турбины
(АВ) и
ком-
прессора
(CD)
определяет режим,
при
котором удовлетворяется
уравнение баланса расходов воздуха компрессором
и
газа турби-
ной.
Это
значит,
что
точка
а
отмечает один
из
возможных уста-
новившихся режимов работы
ГТУ при
температуре
Т
3а
.
Точка
b
представляет другой возможный установившийся режим работы
ГТУ
при
иной начальной температуре газа
Т
зъ
.
Если точки
а и Ь
отвечают крайним
по
температуре
Т
3
режимам,
то
отрезок
ab
изображает рабочую линию, охватывающую
все
возможные уста-
новившиеся режимы работы
ГТУ. При
этом расход газа
во
всем
диапазоне нагрузок изменяется сравнительно мало.
ГТУ второго рода. Принцип
их
регулирования основан
на су-
щественном,
а
иногда
и
значительном изменении расхода рабочего
273
,
С .ft
\
\ /of
Л
\
11
/
8
const
\ V/ /
A ^ A ^
A'
!'!
PJ
тела вместе
с
изменением расхода топ-
лива.
Это
достигается выделением
в особые агрегаты групп ступеней ком-
прессора
с
приводом
от
собственной
турбины. Каждый агрегат имеет свою
частоту вращения
и
изменяет
ее в
про-
цессе регулирования, когда между рото-
рами
ГТУ
проявляются динамические
связи.
От
количества таких выделен-
Рис.
16.3.
Характеристики
ны
*
аг
Р
егатов
зависит число степеней
компрессора
и
турбины
двух-
свободы всей механической системы,
вальной
ГТУ
Чаще всего применяются двух-
в
а л ь н ы е ГТУ с
отделенной
т у р-
биной полезной мощности («свободной» турбиной)
и трехвальные
ГТУ с
выделенными (кроме свободной турбины)
агрегатами
в
составе отсеков ступеней турбины
и
компрессора.
Отсеки высокого
и
низкого давлений компрессора
(КВД и КНД)
обычно объединяются
в
отдельные агрегаты
с
одноименными тур-
бинами высокого
и
низкого давлений
(ТВД и ТНД). Но эти
агре-
гаты
в
принципе могут* быть
и
разноименными
по
давлению.
В
ГТУ
второго рода одновременно
с
изменением температуры
газа
Т
3
перед турбиной существенно меняются
и
частоты враще-
ния выделенных
в
особые агрегаты отсеков компрессора,
что
влечет
за
собой также существенное отклонение
и
количества
подводимого
к
турбинам рабочего тела.
На
диаграммах расходов
(рис.
16.3)
выделенных агрегатов представлен переход
от
точки
а,
находящейся
на
пересечении характеристик турбины
А В и
ком-
прессора
CD при
угловой скорости
со
а
= const и
температуре
Тз
а
,
к
точке
Ь,
лежащей
на
другой характеристике компрессора
CD'
при
иной угловой скорости
co
b
= const.
Точке
Ъ
соответ-
ствует также своя характеристика турбины
А'В',
построенная
для температуры газа
Т
зь
.
В этих условиях изменение режима работы, скажем уменьше-
ние мощности
ГТУ,
происходит
не
только непосредственно
от
сни-
жения температуры газа
Т
3
, но и за
счет понижения расхода
ра-
бочего тела
(G„ и G
b
). А в
таком случае
на
режиме
b
температура
газа
Т
зЬ
перед турбиной может отличаться
от ее
значения
T
Sa
на режиме
а в
гораздо меньшей степени,
чем при
такой
же
смене
режимов
в ГТУ
первого рода.
По мере усложнения схем
ГТУ
предъявляются
и
более высо-
кие требования
к их
системам автоматического регулирования
и
защиты. Устойчивость, отсутствие автоколебаний, простота
и на-
дежность применяемой аппаратуры, широкая унификация
и,
конечно
же,
полная пожарная безопасность
— это
обязательные
требования
к
современным системам регулирования.
Системы регулирования многовальных
ГТУ
усложняются из-за
большого числа входящих
в их
состав аккумуляторов энергии
в виде масс роторов, выделенных
в
связанные лишь динамически
274
агрегаты,
и
емкостей, примыкающих
к
этим агрегатам. Матема-
тические модели всей цепи звеньев таких агрегатов выражаются
системой дифференциальных уравнений высокого порядка. Реше-
ние задач устойчивости
и
построения процессов регулирования
для сложных систем
ГТУ при
современных вычислительных сред-
ствах
не
представляет принципиальных трудностей.
Создание простой,
по
возможности, математической модели
системы регулирования
и
изыскание оптимальных технических
средств
ее
осуществления
—
главные задачи конструктора.
§
16.2.
УРАВНЕНИЕ РОТОРА
Движение ротора
ГТУ
можно описать линейным диф-
ференциальным уравнением, полученным
тем же
методом,
как
и
в § 10.1.
Новым будет лишь учет
в
динамических константах
момента сопротивления компрессора.
Пусть газовая турбина вращает цикловой компрессор,
входящий
в
состав
ГТУ, и
электрический генератор, расположен-
ный
на том же
валу
(см. рис. 16.1, а). На
общий ротор
со
стороны
газовой турбины действуют силы, создающие вращающий момент
М
т
. Со
стороны
же
компрессора
и
генератора приложены моменты
сопротивления
М
к
и М
Г
. На
основании закона моментов коли-
чества движения запишем уравнение ротора
/со
= АМ
Т
— АМ
Г
— ДМ
К
. (16.1)
Вращающий момент газовой турбины зависит
от
начальных
параметров
Т
3
и р
3
, от
противодавления
р
4
и от
частоты враще-
ния
со. Его
можно представить
в
виде функции
М
т
= / (Т
3
,
Рз
, р
4
, со). (16.2)
Простейшая схема
ГТУ. В (16.2)
температура
Т
3
перед тур-
биной
—
наиболее сильный фактор. Частота
со в
рассматриваемой
схеме меняется сравнительно мало
(в
пределах коэффициента
не-
равномерности),
и
главное изменение вращающего момента про-
исходит
под
влиянием отклонения
в
расходе топлива
AG
Toa
.
Его
же
величина, если топливный насос
не
связан
с
валом тур-
бины, зависит только
от
положения
m
топливного клапана
или
форсунки
G
I0
„
= /(m). (16.3)
В случае приблизительно безынерционных регуляторов
и
главного сервомотора расход топлива определяется
по
статической
характеристике топливного органа
в
зависимости
от
частоты вра-
щения. Вместе
с
расходом топлива изменяются
при
малых емко-
стях почти мгновенно температура газа
Т
3
и
давление
р
3
. Эти
параметры,
в
свою очередь, определяют расход рабочего тела
и
вращающий момент.
Их
можно также определить
по
статической
характеристике
в
зависимости
от
расхода топлива, если процесс
275
в камере сгорания считать безынерционным.
В
таком случае,
имея
в
виду большую инерцию ротора, переход
на
универсальной
характеристике
(см. рис.
16.2)
надо совершать
от
точки
а к
точке
b
по кривой
CD при со
а
const.
Влияние
же
изменения частоты
вращения
на
расход воздуха
и на
момент вращения можно рас
считывать
по
частным производным
от
этих величин
по
кривой
А В,
т.
е. без
учета изменения температуры
от
сгорания топлива
(Т
3
=
const).
Таким образом,
та
часть процесса, которая происходит
от
повышения температуры
Т
3
и
связанного
с ней
увеличения
дав те
ния
р
3
перед турбиной, выделяется
как
безынерционная
и
рассчи
тывается
по
статическим характеристикам
в
зависимости
от
хода
m
регулировочного клапана,
но при со =
const.
В
этой части про
цесса изменения мощностей турбины
и
компрессора определяются
членами (дМ
т
/дт)
Am и
(дМ
к
/дт)
Am.
Последний член рассчи
тывается
по
изменению давления
р
2
за
компрессором
в
зависимости
от расхода топлива
и при со
const.
Другая
же
часть процесса,
которая происходит
от
изменения
со при
сильно выраженном
влиянии инерции роторгов, отражается членами (дМ
к
/дш)
Асо и
(дМ
Т
/д(о)
Асо.
Здесь условно выделяется небольшой дополнитель
ный расход «холодного» воздуха
AG„,
который проходит сквозь
компрессор
и
турбину, совершая
в
итоге отрицательную работу,
поскольку расход теплоты
на его
нагрев
уже
учтен
в
безынерцион
ной части процесса. Этим приемом расчета вводится поправка
к влиянию завышенной температуры
Т
я
в
течение условного
безынерционного процесса
при со =
const,
т. е. при
искусственно
заниженном расходе воздуха.
В
этом условном процессе
КПД
компрессора
и
турбины следует считать такими
же, как при
рав
новесном режиме,
так как в
действительности происходит смеше
ние двух потоков:
при со
const
и Т
3
const.
Напомним,
что
рассматривается схема
ГТУ с
небольшим диапазоном изменения
частоты вращения,
при
котором свойствами саморегулирования
турбины можно пренебречь
при
вычислении производной дМ
т
/да>.
Относительная величина сопротивления
в
переходных патруб
ках
и в
камере сгорания
в
процессе регулирования меняются
сравнительно мало,
и это
дает основание установить
по
статиче
ским характеристикам алгебраическую связь между давлениями
р
2
и р
3
. А в
таком случае расход рабочего тела
и
вращающий
мо
мент
в
процессе регулирования можно определить
как
функцию
двух параметров:
m и со.
Вращающий момент
М
т
= / (т, со), и его
отклоне
ния
от
исходного значения определяются суммой двух членов:
ДЛГ
Т
=
(dMJdm) Am
+
(дМ
Т
/да) Асо.
(16.4)
Здесь первый член
в
правой части уравнения играет главную роль,
а второй член рассчитывается
по
дополнительному изменению
расхода воздуха
в
зависимости
от
со,
как
только
что
было разъяс
нено.
276
где
Т =
JayJkM
АЛ
„электрического
Момент сопротивления
=»
„„„„„„,.
л.
„мню
от
угловой скорости
генератора выразим
как
функи
И1и
и J
(см.
§
10.1),
и его
отклонения
АМ
Г
=
(дМ
Г
/де>)
А«
(165)
w „компрессора
при
Момент
с о п р о т и в л е н и я * £
0
/
ой
неизменном состоянии засасываемого в«зд^
л
•»
„ /считается
р, « р.), а зна
скорости
со и
давления нагнетания
р
2
[у
ЧП1а
г
чит,
— и от
координаты
т.
Следовательно,
АМ
К
=
(dMjd*)
Асо
+
{dMJdm)
Am.
(16.6)
Последний член
в
(16.6)
описывает изменение момента
М
к
пол
влиянием давления
р
2
,
меняющегося вместе
с ^
х
в£ли
_
Уравнение ротора запишем
чинах
на
основании
(16.1), (16.4)—(16.6)
ь
х
(
16
7
)
(16.8)
,
:
(<Ш
К
сдо
дМ
г
/д(0+
сШ
г
/дсо)со„;
(16.9)
k
m
=
(дМ
Т
/дт
dMJdm)
m
m
Jk
M
.
(16.10)
D
„ „„
R
cero
ротора представлено
В результате упрощении уравнение
^е
£
Mec
k
с
алгебраиче
в виде апериодического звена.
Это
VP*
6
"
6
"
„стик представляет
скими выражениями статических харакv
v
ре
гулиро
собои замкнутую математическую модель динамические
вания.
Эта
простейшая модель отраЖ^
С1
свойства
ГТУ
рассматриваемого типа „
тлм
,
пм|
„„
пп
т
,
а „
качества системы регулиро
Как видно, высокие динамические
киксы
mPY
вания одновальной
ГТУ
могут быть достигнуты прост,шитех
а малоинерционного регуля
ническими средствами: применением
MUJ
I„„,„«
UM
„
„»,,,
т
опрменем
и
топливного регу
тора, главного сервомотора
с
малым вр^
м
°'
лировочного органа надлежащего профм*
наличии
зна
Емкость между турбиной
и
компрессер,
v
чительнои емкости перед турбиной
из *
Pi
=
const,
получим изменение момента
тур
АМ
Т
=
(дМ
Т
/дТ
3
)
АТ
3
+
(дМ
т
/д
Р
з)
АР»
+ (
дМ
^
Аш
(16Л1)
„
,
а
компрессора
в
данном
слу
Изменение момента сопротивления кит
v v
чае зависит
от р
2
и со и при р
2
« р
3
находим
АМ
К
=
(дМ
к!
д
Рз
)
Ар
3
+
QMJdm)
Асо.
(16.12)
^
„„м по
прежнему уравнением
Сопротивление генератора выразим
п« г J
;Г
^
16,
п
' » д, „ П6 1),
запишем
у р а в и е
Подставив наиденные функции
в U
u
<"
ние ротора
1р,,
(16.13)
277
где
хт, и х
Ра
—
относительные изменения температуры
и
давле-
ния газа
в
емкости между турбиной
и
компрессором;
k
Ti
и к
Рз
—
коэффициенты усиления, определяемые
по
формулам:
кт,
=
(0М
т
/дТ
3
)
T
30
/k
M
; k
Pi
=
(дМ
т
/др
3
-
дМ
К
)/др
3
/к
м
;
k
M
—
по
(16.9).
Динамическая постоянная
Т
вычисляется согласно
(16.8).
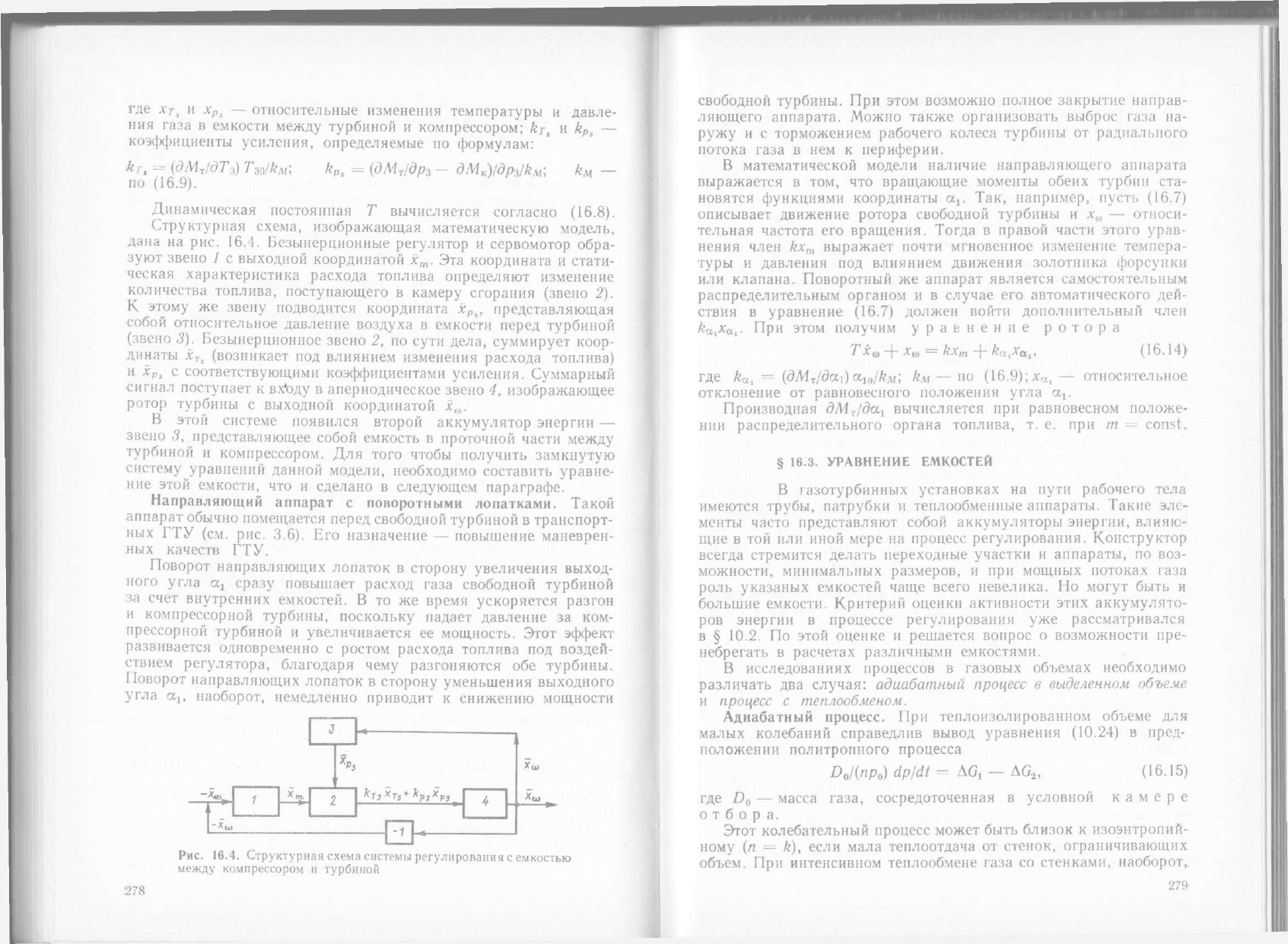
Структурная схема, изображающая математическую модель,
дана
на
рис.
16.4. Безынерционные регулятор
и
сервомотор обра-
зуют звено
J с
выходной координатой
х
т
.
Эта
координата
и
стати-
ческая характеристика расхода топлива определяют изменение
количества топлива, поступающего
в
камеру сгорания (звено
2).
К этому
же
звену подводится координата
х
Рг
,
представляющая
собой относительное давление воздуха
в
емкости перед турбиной
(звено
3).
Безынерционное звено
2,
по
сути дела, суммирует коор-
динаты
x
Ti
(возникает
под
влиянием изменения расхода топлива)
и
х
Ра
с
соответствующими коэффициентами усиления. Суммарный
сигнал поступает
к
вхЪду
в
апериодическое звено
4,
изображающее
ротор турбины
с
выходной координатой
х
а
.
В этой системе появился второй аккумулятор энергии
—
звено
3,
представляющее собой емкость
в
проточной части между
турбиной
и
компрессором.
Для
того чтобы получить замкнутую
систему уравнений данной модели, необходимо составить уравне-
ние этой емкости,
что и
сделано
в
следующем параграфе.
Направляющий аппарат
с
поворотными лопатками. Такой
аппарат обычно помещается перед свободной турбиной
в
транспорт-
ных
ГТУ (см. рис.
3.6).
Его
назначение
—
повышение маневрен-
ных качеств
ГТУ.
Поворот направляющих лопаток
в
сторону увеличения выход-
ного угла
а
г
сразу повышает расход газа свободной турбиной
за счет внутренних емкостей.
В то же
время ускоряется разгон
и компрессорной турбины, поскольку падает давление
за
ком-
прессорной турбиной
и
увеличивается
ее
мощность. Этот эффект
развивается одновременно
с
ростом расхода топлива
под
воздей-
ствием регулятора, благодаря чему разгоняются
обе
турбины.
Поворот направляющих лопаток
в
сторону уменьшения выходного
угла
а
1(
наоборот, немедленно приводит
к
снижению мощности
J
278
Рис.
16.4.
Структурная схема системы регулирования
с
емкостью
между компрессором
и
турбиной
свободной турбины.
При
этом возможно полное закрытие направ-
ляющего аппарата. Можно также организовать выброс газа
на-
ружу
и с
торможением рабочего колеса турбины
от
радиального
потока газа
в нем к
периферии.
В математической модели наличие направляющего аппарата
выражается
в
том,
что
вращающие моменты обеих турбин ста-
новятся функциями координаты
а
х
.
Так,
например, пусть
(16.7)
описывает движение ротора свободной турбины
и х
а
—
относи-
тельная частота
его
вращения. Тогда
в
правой части этого урав-
нения член
kx
m
выражает почти мгновенное изменение темпера-
туры
и
давления
под
влиянием движения золотника форсунки
или клапана. Поворотный
же
аппарат является самостоятельным
распределительным органом
и в
случае
его
автоматического дей-
ствия
в
уравнение
(16.7)
должен войти дополнительный член
k
ai
x
ai
- При
этом получим уравнение ротора
Tx
a
-\-x
a
=
kx
m
~\-kr,
1
x
ai
,
(16.14)
где
k
a
, =
(dM
r
/dai)
a
ln
/kM\
км — по
(16.9);
x
ai
—
относительное
отклонение
от
равновесного положения угла
а
х
.
Производная дМт/дщ вычисляется
при
равновесном положе-
нии распределительного органа топлива,
т. е. при m =
const.
§
16.3.
УРАВНЕНИЕ ЕМКОСТЕЙ
В газотурбинных установках
на
пути рабочего тела
имеются трубы, патрубки
и
теплообменные аппараты. Такие эле-
менты часто представляют собой аккумуляторы энергии, влияю-
щие
в
той или
иной мере
на
процесс регулирования. Конструктор
всегда стремится делать переходные участки
и
аппараты,
по
воз-
можности, минимальных размеров,
и при
мощных потоках газа
роль указаных емкостей чаще всего невелика.
Но
могут быть
и
большие емкости. Критерий оценки активности этих аккумулято-
ров энергии
в
процессе регулирования
уже
рассматривался
в
§
10.2.
По
этой оценке
и
решается вопрос
о
возможности пре-
небрегать
в
расчетах различными емкостями.
В исследованиях процессов
в
газовых объемах необходимо
различать
два
случая: адиабатный процесс
в
выделенном объеме
и процесс
с
теплообменом.
Адиабатный процесс.
При
теплоизолированном объеме
для
малых колебаний справедлив вывод уравнения
(10.24)
в
пред-
положении политропного процесса
D
0
/(np
0
)
dp/dt
=
AGi
—
AG
2
,
(16.15)
где
D
0
—
масса газа, сосредоточенная
в
условной камере
отбора.
Этот колебательный процесс может быть близок
к
изоэнтропий-
ному
(п = k),
если мала теплоотдача
от
стенок, ограничивающих
объем.
При
интенсивном теплообмене газа
со
стенками, наоборот,
279