J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.

54 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
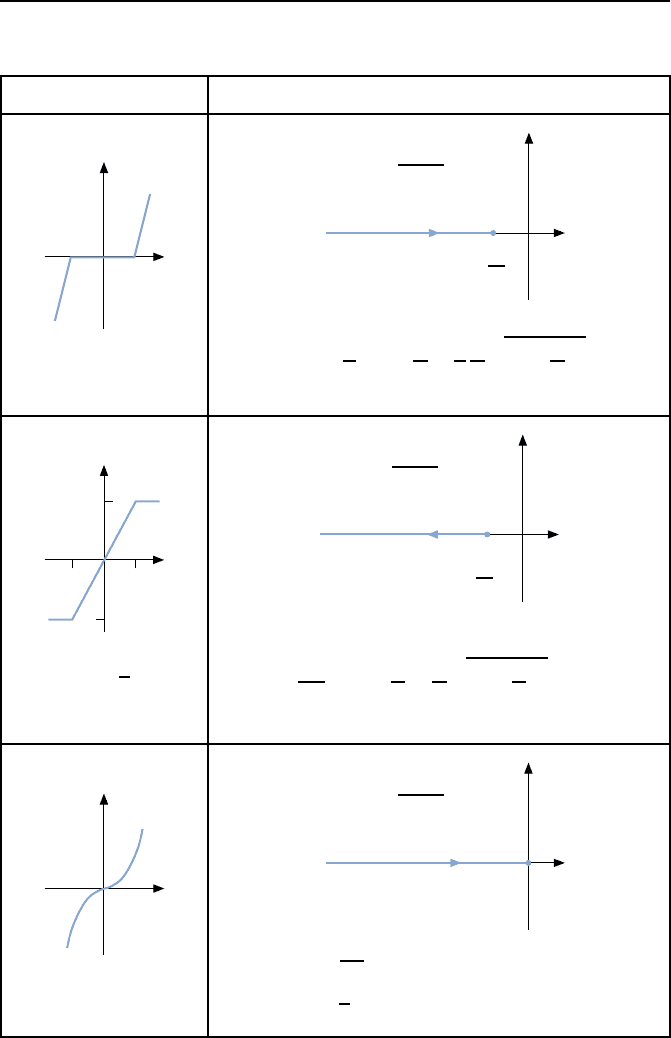
Tabelle 2.1: Kennlinien und ihre Beschreibungsfunktionen - Fortsetzung.
Nichtlinearit
¨
at Beschreibungsfunktion N(A) und Ortskurve −1/N (A)
Totzone
u
ea
−a
m
m
Steigung: m
Im
Re
A → a
A →∞
−
1
m
−
1
N(A)
N(A)=m
1−
2
π
arcsin
a
A
−
2
π
a
A
r
1 −
“
a
A
”
2
!
,A≥ a
Begrenzungsglied
u
e
b
−b
a−a
m =
b
a
Im
Re
A →∞
−
1
m
A ≤ a
−
1
N(A)
N(A)=
8
>
<
>
:
m,0 ≤ A ≤ a
2m
π
arcsin
a
A
+
a
A
r
1 −
“
a
A
”
2
!
,A>a
Potenzen
u
e
u = e |e|,
u = e
3
Im
Re
A → 0
A →∞
−
1
N(A)
N(A)=
8A
3π
, f
¨
ur u = e |e| und A ≥ 0
N(A)=
3
4
A
2
, f
¨
ur u = e
3
und A ≥ 0
2.1. Verfahren der harmonischen Balance 55
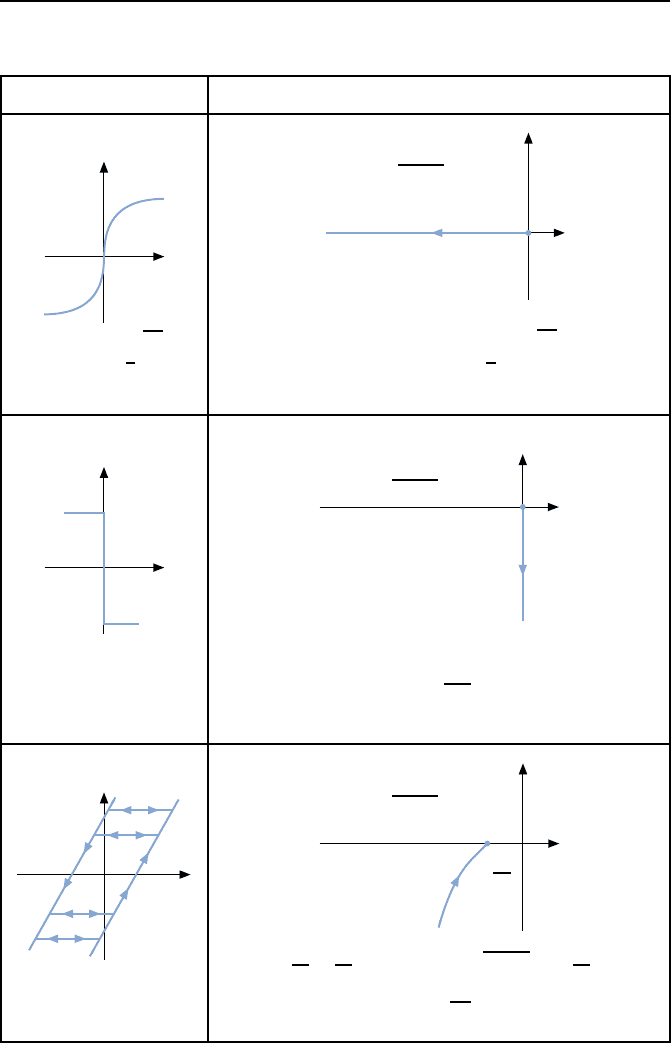
Tabelle 2.1: Kennlinien und ihre Beschreibungsfunktionen - Fortsetzung.
Nichtlinearit
¨
at Beschreibungsfunktion N(A) und Ortskurve −1/N (A)
Wurzel n
u
e
u =sgn(e)
p
|e|,
u =
3
√
e
Im
Re
A →∞
A =0
−
1
N(A)
N(A)=1.11A
−1/2
, f
¨
ur u =sgn(e)
p
|e| und A ≥ 0
N(A)=1.16A
−2/3
, f
¨
ur u =
3
√
e und A ≥ 0
Trockene Reibung
u
b
−b
˙e
Reibkraft: b
u = −b sgn ( ˙e)
Im
Re
A →∞
A =0
−
1
N(A)
N(A)=−j
4 b
πA
, A ≥ 0
Lose
u
ea
−a
Steigung: m
Im
Re
A →∞
A → a
−
1
m
−
1
N(A)
N(A)=
m
2
+
m
π
“
arcsin α + α
p
1−α
2
”
− j
m
π
`
1−α
2
´
mit α =1−
2a
A
, A>a
56 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
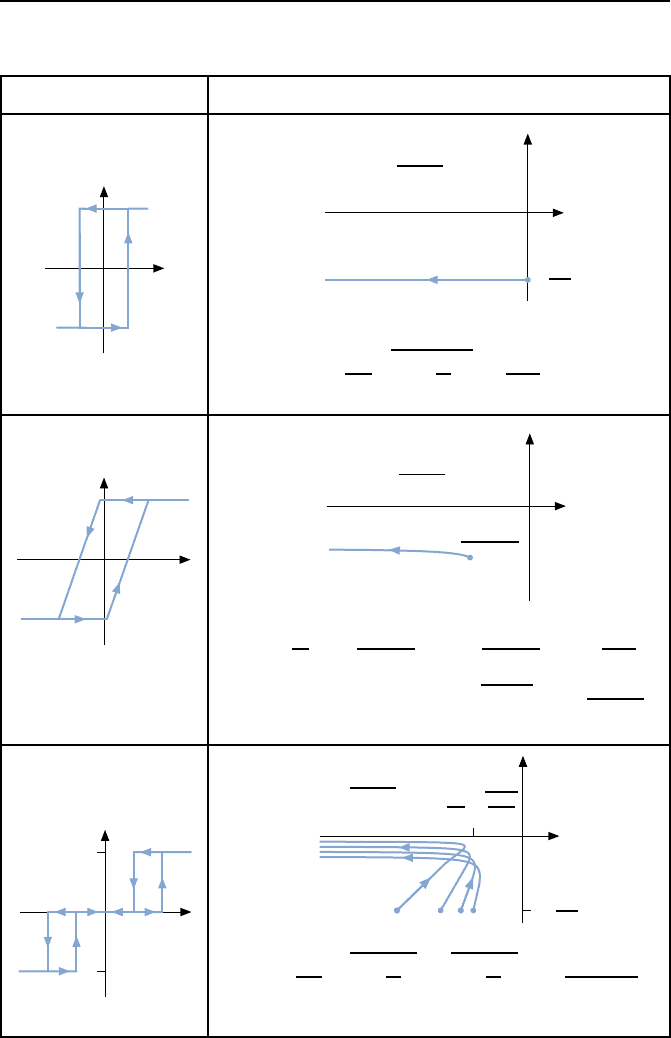
Tabelle 2.1: Kennlinien und ihre Beschreibungsfunktionen - Fortsetzung.
Nichtlinearit
¨
at Beschreibungsfunktion N(A) und Ortskurve −1/N (A)
Harte Hysterese
u
e
b
−b
a−a
Im
Re
A →∞
A = a
−
πa
4b
−
1
N(A)
N(A)=
4b
πA
r
1 −
“
a
A
”
2
− j
4ab
πA
2
,A≥ a
Weiche Hysterese
u
−a
a
b
−b
e
m
Steigung: m
Im
Re
A =
b + ma
a
A →∞
−
1
N(A)
N(A)=
m
π
„
μ
„
b + ma
mA
«
+ μ
„
b − ma
mA
««
− j
4ba
πA
2
,
μ(x)=arcsin(x)+x
p
1 − x
2
,A≥
b + ma
m
Dreipunktglied mit
Hysterese
u
e
a
−a
b
−b
c
−c
Im
Re
−
πa
4b
q
a+c
a−c
−
πa
4b
A →∞
A = a
−
1
N(A)
N(A)=
2b
πA
r
1−
“
c
A
”
2
+
r
1−
“
a
A
”
2
!
− j
2b(a − c)
πA
2
,
A ≥ a
2.1. Verfahren der harmonischen Balance 57
Ein wichtiges Beispiel f
¨
ur eine zusammengesetzte Kennlinie ist eine st
¨
uck-
weise lineare, stetige Kennlinie, d. h. ein Polygonzug. Man kann diesen Poly-
gonzug aus einer Summe von Totzonen oder Begrenzungsgliedern konstruie-
ren. In den 2k Intervallen [±a
i
, ±a
i+1
),i=0,...,k, eines Polygonzuges liegt
jeweils eine Gerade mit der Steigung m
i
und der Polygonzug ist punktsym-
metrisch und geht durch null, d. h.
u =
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
m
1
e, e ∈ [0, ±a
1
),
m
2
e ± (m
1
− m
2
)a
1
,e∈ [±a
1
, ±a
2
),
m
3
e ± (m
1
− m
2
)a
1
± (m
2
− m
3
)a
2
,e∈ [±a
2
, ±a
3
),
.
.
.
m
k
e ±
k−1
i=1
(m
i
− m
i+1
)a
i
,e∈ [±a
k−1
, ±∞).
Dann setzt sich die zugeh
¨
orige Beschreibungsfunktion aus Beschreibungsfunk-
tionen von Totzonen zusammen. Die entsprechende Beschreibungsfunktion der
Totzone findet sich in Tabelle 2.1. Es gilt f
¨
ur den Polygonzug
N
ges
(A)=m
1
+
k−1
i=1
(m
i+1
− m
i
)
1 −
2
π
μ
a
i
A
!
mit
μ(x)=arcsin(x)+x
1 − x
2
.
Hierbei muss A ≥ a
k−1
sein.
2.1.4 Stabilit
¨
atsanalyse von Grenzzyklen
Aus den Verl
¨
aufen der Ortskurve G(jω) und der nichtlinearen Ortskurve
−1/N (A) kann man nicht nur erkennen, ob ein Grenzzyklus existieren k
¨
onnte,
sondern auch auf sein Stabilit
¨
atsverhalten schließen. Man kann also untersu-
chen, ob der Grenzzyklus stabil, semistabil oder instabil ist.
F
¨
ur diese Untersuchung geht man davon aus, dass man einen Grenzzyklus
mit der Amplitude A
G
bestimmt hat. Dann wird das Regelkreisverhalten in
einer Umgebung des Grenzzyklus n
¨
aherungsweise durch den linearen Ersatz-
kreis aus Bild 2.3 beschrieben. Hierbei gilt f
¨
ur den Verst
¨
arkungsfaktor des
linearen Ersatzreglers
K = N(A).
¨
Andert man nun die Amplitude geringf
¨
ugig um ΔA zu
A = A
G
+ ΔA,
so
¨
andert sich auch K geringf
¨
ugig. Durch diese
¨
Anderung der Amplitude A
haben wir den Grenzzyklus verlassen und m
¨
ussen uns nun die Frage stellen,
58 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
ob die Trajektorie auf den Grenzzyklus zur
¨
uckl
¨
auft oder von ihm weg. Diese
Frage l
¨
asst sich durch die Untersuchung des Stabilit
¨
atsverhaltens des linearen
Ersatzregelkreises, siehe Bild 2.5, bei
¨
Anderungen von K = N(A
G
+ ΔA)
kl
¨
aren. Vier F
¨
alle sind m
¨
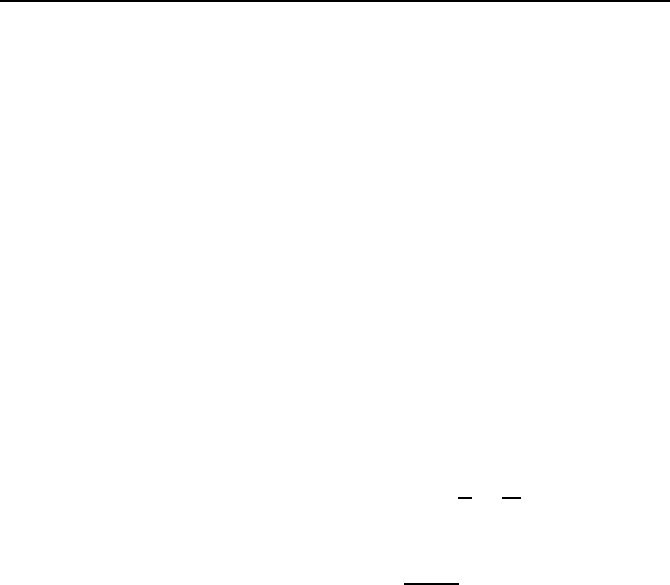
oglich, siehe hierzu auch Bild 2.11.
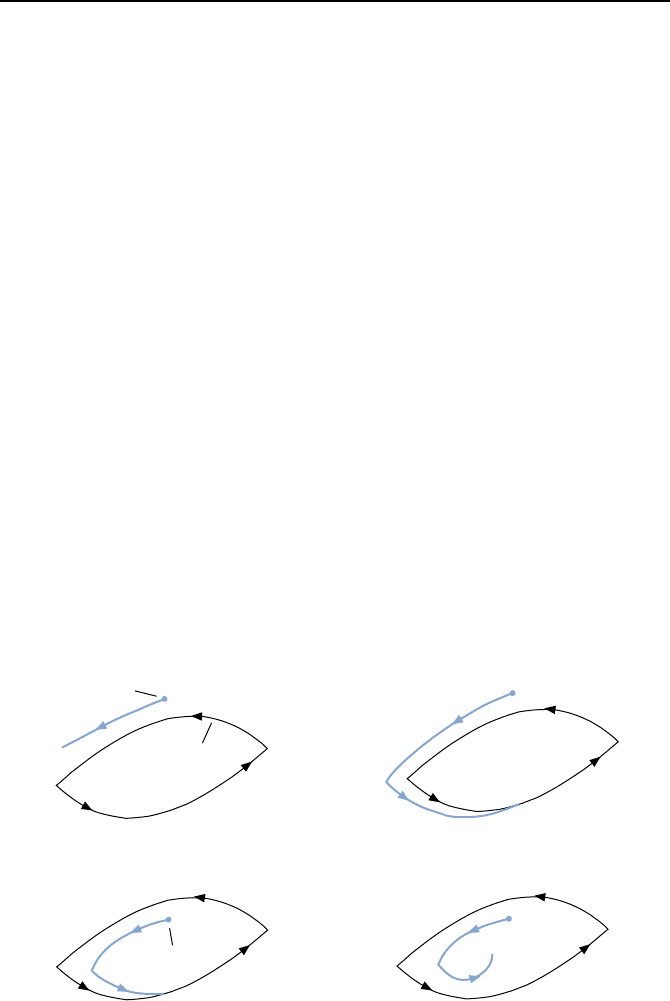
Im Fall (a) gilt ΔA > 0 und der lineare Ersatzregelkreis wird instabil. Da
der lineare Ersatzregelkreis eine gute N
¨
aherung des nichtlinearen Regelkrei-
ses ist, k
¨
onnen wir schlussfolgern, dass sich die Trajektorie vom Grenzzyklus
entfernt. Im Fall (b) gilt ΔA > 0 und der lineare Ersatzregelkreis wird stabil,
deshalb verringert sich die Amplitude A und als Folge strebt die Trajektorie
zum Grenzzyklus. Im Fall (c) gilt ΔA < 0 und der lineare Ersatzregelkreis
wird instabil, deshalb wird die Amplitude A gr
¨
oßer und die Trajektorie strebt
zum Grenzzyklus. Im Fall (d) gilt ΔA < 0 und der lineare Ersatzregelkreis
wird stabil. Als Folge verl
¨
asst die Trajektorie den Grenzzyklus.
Da sowohl der Fall ΔA > 0alsauchderFallΔA < 0 im Regelkreis auftre-
ten, l
¨
asst sich aus den folgenden Situationen auf die Stabilit
¨
at des Grenzzyklus
schließen:
Situation 1: Fall (a) und (c) : semistabiler Grenzzyklus,
Situation 2: Fall (a) und (d) : instabiler Grenzzyklus,
Situation 3: Fall (b) und (c) : stabiler Grenzzyklus,
Situation 4: Fall (b) und (d) : semistabiler Grenzzyklus.
Ob der lineare Ersatzregelkreis durch eine
¨
Anderung ΔA und damit von
K = N(A
G
+ ΔA)
stabil oder instabil wird und welche der obigen Situationen daraus resultiert,
entscheiden wir im Folgenden anhand des vereinfachten Nyquist-Kriteriums
ΔA > 0
ΔA =0
Fall (a): ΔA > 0 und linearer
Ersatzregelkreis instabil.
Fall (b): ΔA > 0 und linearer
Ersatzregelkreis stabil.
ΔA < 0
Fall (c): ΔA < 0 und linearer
Ersatzregelkreis instabil.
Fall (d): ΔA < 0 und linearer
Ersatzregelkreis stabil.
Bild 2.11: Stabilit
¨
atsverhalten bei Amplituden
¨
anderung ΔA des Grenzzyklus.
2.1. Verfahren der harmonischen Balance 59
[53]. Aus der linearen Systemtheorie wissen wir, dass das vereinfachte Nyquist-
Kriterium auf einen offenen Regelkreis mit der
¨
Ubertragungsfunktion K ·G(s),
die ausschließlich stabile Pole und h
¨
ochstens zwei Pole bei s = 0 besitzt,
angewendet wird. L
¨
asst dann die Ortskurve G(jω) den kritischen Punkt
−
1
K
= −
1
N(A
G
+ ΔA)
links liegen, so ist der geschlossene Regelkreis stabil. Andernfalls ist er insta-
bil. Somit k
¨
onnen die obigen vier Situationen anhand der linearen und der
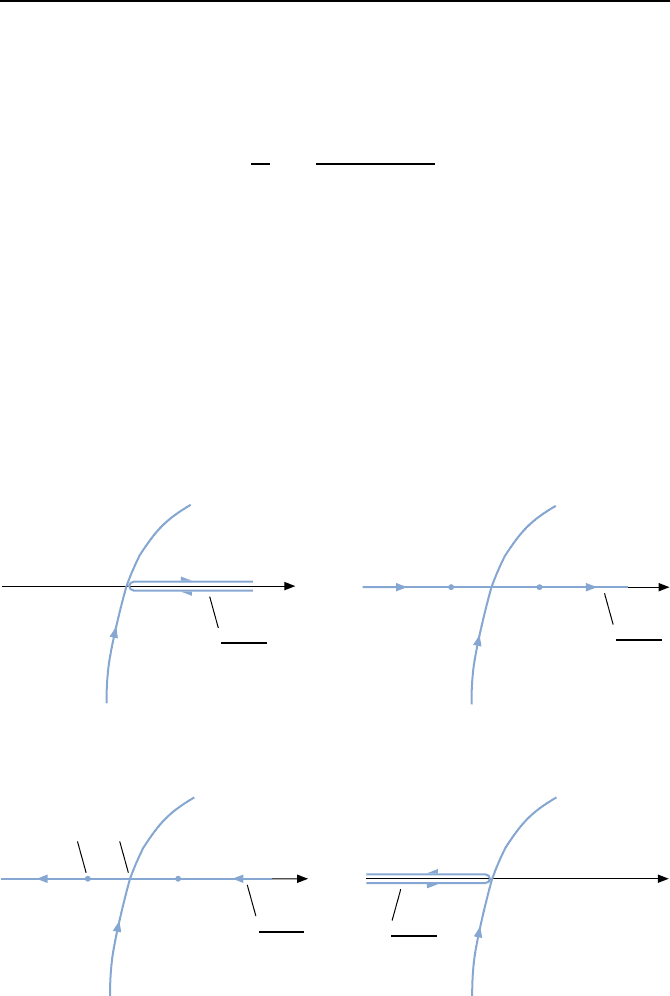
nichtlinearen Ortskurve unterschieden werden, wie es das Bild 2.12 zeigt.
Betrachten wir beispielsweise Situation 3 in Bild 2.12, so l
¨
asst die Orts-
kurve G(jω)f
¨
ur ΔA > 0 den Punkt −1/N (A
G
+ΔA) links liegen. Also ist der
lineare Ersatzregelkreis stabil und der Fall (b) aus Bild 2.11 liegt vor, d. h.,
die Trajektorie l
¨
auft von außen auf den Grenzzyklus zu. F
¨
ur ΔA < 0 dagegen
ist der lineare Ersatzregelkreis instabil, da die Ortskurve G(jω) den Punkt
−1/N (A
G
+ ΔA) rechts liegen l
¨
asst. Der Fall (c) aus Bild 2.11 liegt vor und
die Trajektorie l
¨
auft von innen auf den Grenzzyklus zu. Der Grenzzyklus ist
also stabil.
G(jω)
−
1
N(A)
ΔA <0
ΔA >0
−
1
N(A)
Situation 1: F
¨
alle (a) und (c) liegen
vor. Der Grenzzyklus ist semistabil.
Situation 2: F
¨
alle (a) und (d) liegen
vor. Der Grenzzyklus ist instabil.
ΔA >0
A
G
ΔA <0
−
1
N(A)
G(jω)
G(jω)
−
1
N(A)
Situation 3: F
¨
alle (b) und (c) liegen
vor. Der Grenzzyklus ist stabil.
Situation 4: F
¨
alle (b) und (d) liegen
vor. Der Grenzzyklus ist semistabil.
Bild 2.12: M
¨
ogliche Situationen f
¨
ur die Stabilit
¨
at von Grenzzyklen.

60 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Obige Untersuchungen motivieren folgendes Kriterium
¨
uber die Stabilit
¨
at
von Grenzzyklen. Wie das Verfahren der harmonischen Balance selbst, liefert
es jedoch keine sichere Aussage, sondern gibt nur Hinweise auf die m
¨
oglichen
Verh
¨
altnisse.
Heuristik 2 (Stabilit
¨
at von Grenzzyklen). Ein Grenzzyklus ist im Falle
einer Regelstrecke G(s) mit ausschließlich stabilen Polen und h
¨
ochstens zwei
Polen bei s =0vermutlich
(1) stabil, wenn die nichtlineare Ortskurve die lineare von rechts nach links im
zugeh
¨
origen Schnittpunkt kreuzt,
(2) semistabil, wenn die nichtlineare Ortskurve die lineare im zugeh
¨
origen
Schnittpunkt tangiert,
(3) instabil, wenn die nichtlineare Ortskurve die lineare von links nach rechts
im zugeh
¨
origen Schnittpunkt kreuzt.
Die Richtungen links und rechts sind dabei als diejenigen anzusehen, die sich
beim Entlanglaufen auf der linearen Ortskurve, beginnend bei ω = 0, ergeben.
Ein instabiler oder semistabiler Grenzzyklus ist f
¨
ur einen Regelkreis re-
lativ unkritisch, da die Trajektorie ihn bei kleinsten St
¨
orungen verl
¨
asst und
dann z. B. stabil nach x = 0 strebt. Kennlinien mit Funktionen −1/N (A), die
wie in Situation 2 des Bildes 2.12 in Richtung Ursprung laufen, sind also un-
gef
¨
ahrlicher als die, bei denen das andersherum ist. Denn −1/N (A) schneidet
dann die Ortskurve G(jω) von links nach rechts, da die meisten Ortskurven
im Uhrzeigersinn drehend in den Ursprung laufen.
F
¨
ur das Verfahren der harmonischen Balance gibt es eine Reihe von Erwei-
terungen f
¨
ur Regelkreise mit mehreren Kennlinien, unsymmetrischen Kennli-
nien und Abtastregelungen [50, 60].
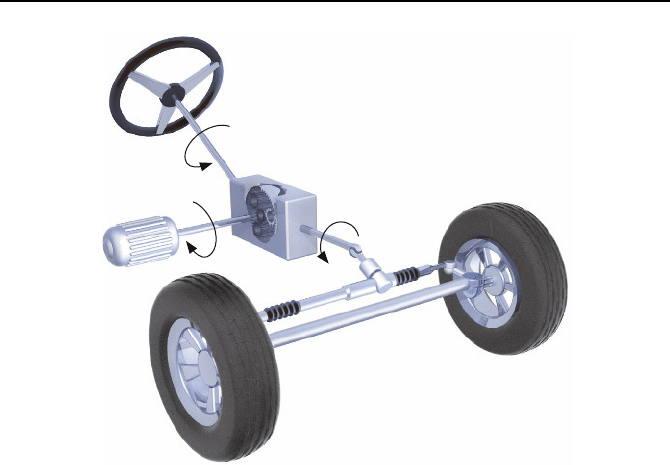
2.1.5 Beispiel Servolenksystem
Wir betrachten ein Servolenksystem f
¨
ur Kraftfahrzeuge, das nach dem Win-
kel
¨
uberlagerungsprinzip arbeitet [92, 101, 102]. Bei diesem Prinzip wird ei-
ne hohe Lenk
¨
ubersetzung verwendet, um das Lenkmoment f
¨
ur den Fahrer
zu reduzieren. Nachteilig sind die großen Lenkwinkel. Ein motorgetriebenes
¨
Uberlagerungsgetriebe verringert daher den Lenkwinkel, den der Fahrer auf-
zubringen hat. Das
¨
Uberlagerungsgetriebe erzeugt hierf
¨
ur einen Zusatzwinkel
δ
2
, der dem Lenkradwinkel δ
1
additiv
¨
uberlagert wird. Beide zusammen er-
zeugen den Ausgangswinkel δ
y
. Bild 2.13 zeigt den prinzipiellen Aufbau.
Servolenksysteme mit Winkel
¨
uberlagerungsprinzip werden auch bei Ak-
tivlenkungen eingesetzt. Die Aktivlenkung reduziert den Lenkwinkelbedarf
bei niedrigen Geschwindigkeiten durch Mitlenken des Stellmotors. Der Fah-
rer kann so mit kleineren Lenkradbewegungen enge Kurven durchfahren. Bei
hohen Geschwindigkeiten lenkt der
¨
Uberlagerungsmotor gegen, so dass große
Lenkradbewegungen nur zu kleinen Lenkeinschl
¨
agen f
¨
uhren. Das erh
¨
oht die
Fahrsicherheit in diesem Geschwindigkeitsbereich.
2.1. Verfahren der harmonischen Balance 61
δ
1
δ
2
,M
δ
y
Bild 2.13: Servolenksystem mit Winkel
¨
uberlagerungsprinzip.
Im Normalfall h
¨
alt der Fahrer das Lenkrad fest und gibt einen Lenkwin-
kel δ
1
vor. Bei losgelassenem Lenkrad f
¨
allt diese Lenkwinkelvorgabe weg und
es k
¨
onnen Grenzzyklen im Lenksystem auftreten. Diese sind nat
¨
urlich un-
erw
¨
unscht.
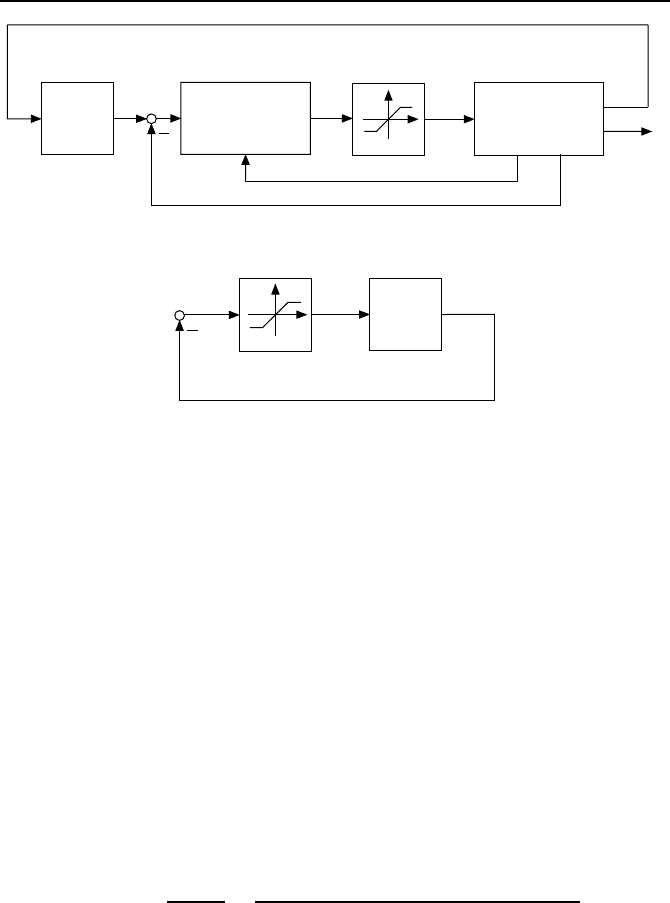
Zum Zwecke ihrer Analyse betrachten wir den in Bild 2.14 dargestellten
Aufbau der Regelung des Lenksystems bei losgelassenem Lenkrad. Stellmotor
mit Stromregelung und
¨
Uberlagerungsgetriebe bilden die Regelstrecke, deren
Eingangsgr
¨
oße der Drehmomentsollwert M des Stellmotors ist. Ausgangsgr
¨
oße
dieser Regelstrecke ist zum einen der Ausgangswinkel δ
y
= δ
1
+ δ
2
.Zum
anderen ist aber auch der Lenkradwinkel δ
1
Ausgangsgr
¨
oße, da ja das Lenkrad
nicht durch den Fahrer festgehalten wird. Der PD-Regler f
¨
ur den Zusatzwinkel
δ
2
besitzt die Parameter K
R
= 3000 N m rad
−1
und T
V
=0.02 s.
Beschrieben wird der Stellmotor samt Stromregelung und
¨
Uberlagerungs-
getriebe durch das lineare Zustandsraummodell
˙
δ =
⎡
⎢
⎢
⎣
0010
0001
−67.3568 −67.3568 −11.3988 −11.3988
−24.1480 −24.1480 −4.0866 −4.0866
⎤
⎥
⎥
⎦
δ +
⎡
⎢
⎢
⎣
0
0
−4.0123 ·10
−2
1.8977
⎤
⎥
⎥
⎦
M.
Dabei ist der Zustandsvektor durch δ =
δ
1
δ
2
˙
δ
1
˙
δ
2
T
gegeben.
Das Drehmoment M ist auf M
max
= ±21 N m begrenzt. Vom PD-Regler
M
R
=K
R
(δ
2,soll
−δ
2
−T
V
˙
δ
2
) vorgegebene Drehmomente M
R
, die diese Grenzen
62 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
K
P
PD-Regler
Motor mit Getriebe
M
R
M
δ
2
˙
δ
2
δ
y
δ
1
K
R
(δ
2,soll
− δ
2
−T
V
˙
δ
2
)
˙
δ = Aδ + bM
δ
y
= δ
1
+ δ
2
δ
2,soll
Bild 2.14: Regelkreis des Lenksystems bei losgelassenem Lenkrad.
M
R
M
−M
R
G(s)
Bild 2.15: Nichtlinearer Standardregelkreis des Lenksystems, der sich durch Umfor-
mung des Regelkreises aus Bild 2.14 herleitet.
¨
uberschreiten, werden durch eine S
¨
attigungskennlinie
M =
⎧
⎪
⎨
⎪
⎩
M
max
,M
R
>M
max
,
M
R
, |M
R
|≤u
max
,
−M
max
,M
R
< −M
max
,
begrenzt.
Der Lenkradwinkel δ
1
gibt bei der betrachteten Fahrzeuggeschwindigkeit
¨
uber den Faktor K
P
=1.5 den Sollwert δ
2,soll
des Zusatzwinkels δ
2
vor. Da das
Lenkrad nicht vom Fahrer festgehalten wird, wirkt das
¨
Uberlagerungsgetriebe
direkt auf den Lenkradwinkel δ
1
ein, wie in Bild 2.14 gezeigt.
Der Regelkreis aus Bild 2.14 l
¨
asst sich in einen nichtlinearen Standard-
regelkreis, wie ihn Bild 2.15 zeigt, umformen. F
¨
ur die
¨
Ubertragungsfunktion
G(s)erh
¨
alt man dabei unter Ber
¨
ucksichtigung der Dynamik des stromgere-
gelten Stellmotors mit
¨
Uberlagerungsgetriebe
G(s)=−
M
R
(s)
M(s)
=
113.9s
3
+ 7181s
2
+ 171200s + 965900
s
2
(s
2
+15.49s +91.50)
.
Die Anwendung der harmonischen Balance ergibt zwei Schnittpunkte der
Ortskurve G(jω) mit der Ortskurve −1/N (A) der Beschreibungsfunktion des
S
¨
attigungskennliniengliedes, wie in Bild 2.16 dargestellt. Wir erwarten also
zwei Grenzzyklen mit den Frequenzen in der N
¨
ahe von ω
1
und ω
2
.Beidemin
Bild 2.16 links liegenden Schnittpunkt wird die Ortskurve G(jω)vonrechts
nach links von der nichtlinearen Ortskurve durchstoßen. Dieser Grenzzyklus
mit der Frequenz ω
1
ist stabil.
2.1. Verfahren der harmonischen Balance 63
30
25
20
15
10
5
0
-5
-50
-1500
-1000
-500
0
Realteil
Imagin
¨
arteil
G(jω)
−
1
N(A)
A
ω
ω
1
ω
2
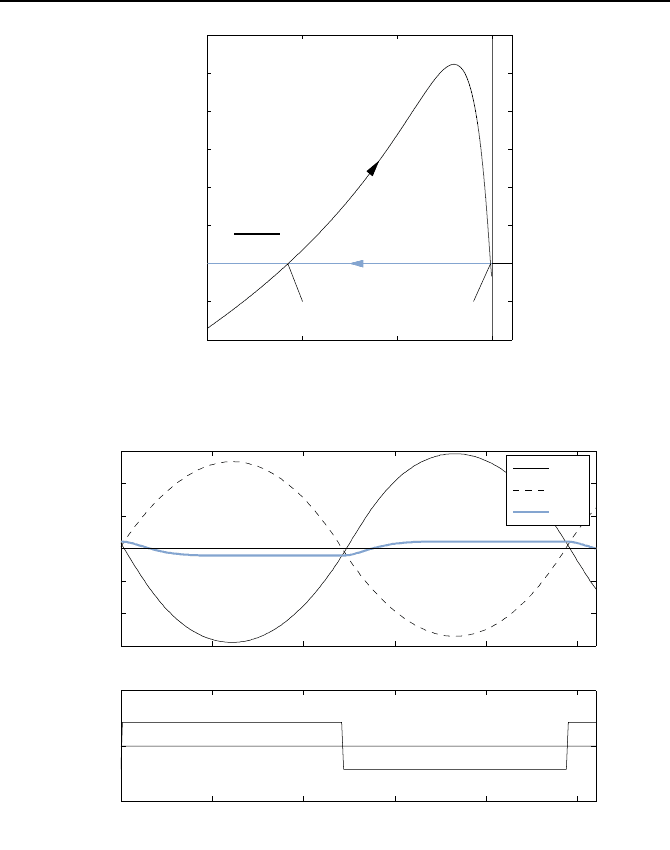
Bild 2.16: Ortskurven G(jω) und −1/N (A).
δ
1
δ
2
δ
y
6
4
2
0
0
-2
-4
-6
50
-50
0
0
0.5
0.5
1
1
1.5
1.5
2
2
2.5
2.5
Zeit t in s
uinNm
δ
1
,δ
2
,δ
y
in rad
Bild 2.17: Winkel- und Stellgr
¨
oßenverl
¨
aufe des Grenzzyklus.
Der zweite Grenzzyklus dagegen ist instabil. Er hat also keine prakti-
sche Bedeutung. Der stabile Grenzzyklus dagegen schon. Seine Perioden-
dauer ermittelt man durch Auswertung der Gleichung der harmonischen
Balance, G(jω)=−1/N (A), zu T
harm
=2π/ω
1
=1.97 s. Aufgrund des
N
¨
aherungscharakters der harmonischen Balance ist dieser Wert ungenau. Aus
der Simulation des Systems, dargestellt in Bild 2.17, l
¨
asst sich die Perioden-
dauer zu T
sim
=2.42 s ermitteln.