J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.


1.1. Systembeschreibung und Systemverhalten 3
kann Gl. (1.1) auch als Vektordifferenzialgleichung
˙x = f(x, u)=
⎡
⎢
⎢
⎢
⎢
⎢
⎣
x
2
x
3
.
.
.
x
n
h(x
1
,...,x
n
,u
1
,...,u
m
)
⎤
⎥
⎥
⎥
⎥
⎥
⎦
dargestellt werden.
Systeme mit nur einer Eingangsgr
¨
oße u und einer Ausgangsgr
¨
oße y be-
zeichnet man als Eingr
¨
oßensysteme oder SISO-Systeme (engl. single-input,
single-output). Systeme mit mehreren Eingangsgr
¨
oßen und Ausgangsgr
¨
oßen
werden als Mehrgr
¨
oßensysteme oder MIMO-Systeme (engl. multiple-input,
multiple-output) bezeichnet.
In der Regelungstechnik sind vor allem drei Typen nichtlinearer Regelungs-
systeme von Bedeutung. Die erste Klasse bilden lineare Regler f
¨
ur nichtlineare
Regelstrecken, wie sie Bild 1.2 zeigt. Sie fallen oft in die Kategorie linearer Reg-
lerentwurfsmethoden, denn in diesem Fall ist die Regelstrecke linearisierbar
und das linearisierte Modell hinreichend genau. Dann kann die lineare Sys-
temtheorie zum Einsatz kommen. Wir bezeichnen dabei die F
¨
uhrungsgr
¨
oße
mit w und die Regelabweichung mit e. Im MIMO-Fall verwenden wir fett
gedruckte Buchstaben w und e.
w
e
u
y
linearer
Regler
nichtlineare
Regelstrecke
Bild 1.2: Nichtlineare Regelstrecke mit linearem Regler.
Die zweite Klasse stellen nichtlineare Regler f
¨
ur lineare Regelstrecken dar,
wie sie Bild 1.3 zeigt. Oft werden einfache nichtlineare Regler aus technischen
Gr
¨
unden oder der Kosten wegen f
¨
ur lineare Regelstrecken eingesetzt. Ein weit-
verbreitetes Beispiel ist etwa die Temperaturregelung in B
¨
ugeleisen mit einem
w
e
u
y
lineare
Regelstrecke
nichtlinearer
Regler
Bild 1.3: Lineare Regelstrecke mit nichtlinearem Regler.

4 Kapitel 1. Grundlagen nichtlinearer Systeme
w
e
u
y
nichtlineare
Regelstrecke
nichtlinearer
Regler
Bild 1.4: Nichtlineare Regelstrecke mit nichtlinearem Regler.
Bimetall. Das Bimetall hat die Charakteristik eines Schalters mit Hysterese,
d. h., es ist ein nichtlineares System. Nichtlineare Regler komplizierter Bauart
werden ebenfalls f
¨
ur lineare Regelstrecken eingesetzt, um bessere Regelergeb-
nisse zu erzielen, als es mit linearen Reglern m
¨
oglich w
¨
are.
Die dritte Klasse bilden nichtlineare Regler f
¨
ur nichtlineare Regelstrecken,
wie in Bild 1.4 dargestellt. Nichtlineare Regelstrecken sind oft sehr komplex in
ihrem Verhalten. Eine lineare Regelung kann dann vielfach die gew
¨
unschte Re-
gelqualit
¨
at nicht erzeugen. In diesem Fall muss eine geeignete nichtlineare Re-
gelung entworfen werden. Beispielsweise ist es in bestimmten F
¨
allen m
¨
oglich,
eine nichtlineare Regelstrecke mit einem nichtlinearen Regler so zu kombinie-
ren, dass ein linearer Regelkreis entsteht. Sein Verhalten ist dann aufgrund
der Linearit
¨
at einfach zu durchschauen.
1.1.3 Ruhelagen nichtlinearer Systeme
Eines der zentralen Ziele der Regelungstechnik ist es, den Zustand einer Re-
gelstrecke in eine Ruhelage zu bringen und ihn dort zu halten. Beispielsweise
will man ein Flugzeug mittels eines Autopiloten auf eine bestimmte H
¨
ohe,
das Wasser eines Boilers auf eine bestimmte Temperatur oder ein gewalztes
Blech auf eine vorgegebene Dicke bringen und dort halten. F
¨
ur den Entwurf
eines geeigneten Reglers muss man also zuerst eine Ruhelage ausfindig ma-
chen. Dabei stellt sich die Frage, wie man eine Ruhelage eines nichtlinearen
Systems ermittelt. Bevor diese Frage n
¨
aher untersucht wird, soll der Begriff
der Ruhelage genauer definiert werden.
Definition 1 (Ruhelage). Gegeben sei das System
˙x = f (x, u).
Dann heißt ein Punkt x
R
des Zustandsraumes Ruhelage, wenn
˙x = f(x
R
, 0)=0
gilt.
In dieser Definition wurde
u = 0

1.1. Systembeschreibung und Systemverhalten 5
vorausgesetzt. Selbstverst
¨
andlichkannesauchF
¨
alle geben, in denen
u = c = 0
ist, wobei c ∈ IR
m
ein konstanter Vektor ist und
˙x = f(x, u = c)=0
gilt. Dieser Fall ist durch obige Definition abgedeckt, wenn man die Transfor-
mation
u = ˜u + c
durchf
¨
uhrt. Dann hat man das System
˙x =
˜
f(x, ˜u)
zu untersuchen, und dieses hat f
¨
ur ˜u = 0 eine Ruhelage in x
R
. D. h., es gilt
˙x =
˜
f(x
R
, 0)=0.
Das Auffinden einer Ruhelage eines nichtlinearen Systems ist oftmals nicht
einfach. Man hat n
¨
amlich die implizite Gleichung
˙x = f(x
R
, 0)=0
nach x
R
aufzul
¨
osen. Es kann eine, keine oder mehrere L
¨
osungen geben. Auch
ein L
¨
osungskontinuum ist m
¨
oglich. Dies ist in Bild 1.5 f
¨
ur eine eindimensionale
Funktion f illustriert.
Bei der konkreten Berechnung von Ruhelagen x
R
k
¨
onnen dann die folgen-
den drei F
¨
alle auftreten. Im ersten Fall ist die implizite Gleichung
Kontinuum von L
¨
osungen
eine L
¨
osung mehrere L
¨
osungen
keine L
¨
osung
f
f
f
f
xx
xx
x
R
x
R1
x
R3
x
R2
Bild 1.5: M
¨
ogliche L
¨
osungsmengen der Ruhelagengleichung f(x
R
, 0) = 0.

6 Kapitel 1. Grundlagen nichtlinearer Systeme
f(x
R
, 0)=0
explizit nach x
R
aufl
¨
osbar, d. h., es gilt
x
R
= f
−1
(0).
Im zweiten Fall ist die implizite Gleichung transzendent. Dann muss
man auf numerische Verfahren, wie das mehrdimensionale Newton-Verfahren,
zur
¨
uckgreifen. Insbesondere steht man oft vor dem Problem, dass man nicht
weiß, wieviele Ruhelagen existieren oder ob es
¨
uberhaupt welche gibt.
Der dritte Fall betrifft viele technische Systeme. Bei ihnen k
¨
onnen wir
oft aus der Anschauung oder der Systemkenntnis heraus eine Ruhelage x
R
erahnen. Durch Einsetzen in die Systemgleichung l
¨
asst sich die Annahme
¨
uberpr
¨
ufen.
1.1.4 Beispiel Satellit
Wir betrachten die Rotation eines Satelliten bzw. einer Weltraumsonde. Die-
sen k
¨
onnen wir
¨
uber Steuerd
¨
usen um seine Achsen drehen. Bild 1.6 zeigt
einen entsprechenden Satelliten mit seinem k
¨
orperfesten Koordinatensystem
(x, y, z) und einem raumfesten Koordinatensystem (˜x, ˜y, ˜z).
F
¨
ur den Drehimpulsvektor L des Satelliten, der sich mit seinem k
¨
orperfes-
ten Koordinatensystem und dem Winkelgeschwindigkeitsvektor ω gegen
¨
uber
dem raumfesten Koordinatensystem dreht, gilt mit dem Tr
¨
agheitstensor J die
Beziehung
L = Jω.
Die Bewegungsgleichung leitet sich aus
dL
dt
= M (1.2)
ab, wobei der Drehmomentvektor M die durch die Steuerd
¨
usen verursachten
Drehmomente enth
¨
alt. F
¨
ur die Ableitung des Drehimpulses L nach der Zeit
gilt
dL
dt
= J ˙ω + ω × (Jω), (1.3)
wobei der Term ω×(Jω) aus der mit ω erfolgenden Drehung des k
¨
orperfesten
gegen
¨
uber dem raumfesten Koordinatensystem resultiert. Aus Gl. (1.2) und
Gl. (1.3) folgt
J ˙ω = −ω × (Jω)+M . (1.4)
Sind die Achsen des k
¨
orperfesten Koordinatensystems des Satelliten mit
seinen Haupttr
¨
agheitsachsen identisch, so gilt
J =
⎡
⎣
J
x
00
0 J
y
0
00J
z
⎤
⎦
.

1.1. Systembeschreibung und Systemverhalten 7
x
y
z
α
β
γ
ω
z
ω
x
ω
y
˜z
˜x
˜y
Bild 1.6: Satellit mit k
¨
orperfestem Koordinatensystem (x, y, z) und raumfestem Ko-
ordinatensystem (˜x, ˜y, ˜z). Mittels der Euler-Winkel α, β, γ kann die Orientierung
des Satelliten bez
¨
uglich des raumfesten Koordinatensystems angegeben werden.
In diesem Fall ergeben sich aus Gl. (1.4) die Euler’schen Kreiselgleichungen
J
x
˙ω
x
= −(J
z
− J
y
)ω
y
ω
z
+ M
x
,
J
y
˙ω
y
= −(J
x
− J
z
)ω
x
ω
z
+ M
y
,
J
z
˙ω
z
= −(J
y
− J
x
)ω
x
ω
y
+ M
z
als Bewegungsgleichungen des Systems.
Offensichtlich hat der Satellit nur dann eine Ruhelage, d. h., es gilt nur
dann
˙
ω = 0, wenn mindestens zwei der Winkelgeschwindigkeiten ω
x
, ω
y
und
ω
z
gleich null sind. Dabei setzen wir voraus, dass die Stellgr
¨
oßen M
x
, M
y
und
M
z
ebenfalls gleich null sind. Insgesamt ergeben sich so die drei Ruhelagen-
bereiche
ω
R1
=
⎡
⎣
ω
1
0
0
⎤
⎦
, ω
R2
=
⎡
⎣
0
ω
2
0
⎤
⎦
, ω
R3
=
⎡
⎣
0
0
ω
3
⎤
⎦
.

8 Kapitel 1. Grundlagen nichtlinearer Systeme
Dabei k
¨
onnen die Winkelgeschwindigkeiten ω
1
, ω
2
, ω
3
∈ IR beliebige Werte
annehmen. Insgesamt existieren also unendlich viele Ruhelagen. Man beachte,
dass auch der Fall ω
1
= ω
2
= ω
3
=0m
¨
oglich ist, d. h., auch ω = 0 ist eine
Ruhelage.
Das Beispiel illustriert auch, dass der Begriff Ruhelage nicht zwingend die
Abwesenheit von Bewegung, hier bei einem starren K
¨
orper, impliziert. Viel-
mehr bedeutet der Begriff Ruhelage, dass sich die Zust
¨
ande des betrachteten
Systems nicht mit der Zeit
¨
andern.
Wir wollen nun noch die Orientierung des Satelliten im raumfesten Koor-
dinatensystem beschreiben. Dies geschieht mittels der Euler-Winkel α, β und
γ [79, 88], die im Bild 1.6 dargestellt sind und die wir im Vektor ϕ =[αβγ]
T
zusammenfassen. Die Bewegungsgleichungen des Satelliten lauten dann
˙ϕ
˙ω
=
Λ(ϕ)ω
−J
−1
[ω × (Jω)]
+
0
J
−1
M, (1.5)
wobei die Matrix
Λ(ϕ)=
⎡
⎣
1sin(α)tan(β)cos(α)tan(β)
0cos(α) −sin(α)
0sin(α)/ cos(β)cos(α)/ cos(β)
⎤
⎦
den Winkelgeschwindigkeitsvektor ω in den Winkelgeschwindigkeitsvektor ˙ϕ
des raumfesten Koordinatensystems transformiert. Die Transformation ˙ϕ =
Λ(ϕ)ω ist dabei abh
¨
angig von den Euler-Winkeln, d. h. von ϕ.DasSystem
(1.5) besitzt offensichtlich wieder, wenn f
¨
ur den Stellgr
¨
oßenvektor M = 0 gilt,
unendlich viele Ruhelagen
ϕ
R
ω
R
= 0
mit ϕ
R
∈ IR
3
.
In diesem Fall f
¨
uhrt der Satellit allerdings keine Bewegung um eine seiner
Achsen aus.
1.1.5 Ruhelagen linearer Systeme
Lineare Systeme
˙x = Ax + Bu,
y = Cx + Du
bilden einen Sonderfall der allgemeinen Systembeschreibung
˙x = f (x, u),
y = g(x, u)
und sollen im Folgenden kurz betrachtet werden, um die Unterschiede zu
nichtlinearen Systemen aufzuzeigen.

1.1. Systembeschreibung und Systemverhalten 9
u =0
x
2
x
1
1
s
1
s
x
2
x
1
Kontinuum
von Ruhelagen
Bild 1.7: Das System 1/s
2
und seine Ruhelagen x
R
=[a 0]
T
mit a ∈ IR.
Die Ruhelagen linearer Systeme sind einfach aus der Gleichung
˙x = Ax
R
= 0
zu ermitteln, wenn u = 0 gilt. Folgende F
¨
alle k
¨
onnen auftreten: Gilt det(A) =
0, dann gibt es nur die Ruhelage
x
R
= 0.
Gilt det(A) = 0, dann besitzt A Eigenwerte mit dem Wert null, und es gibt
einen linearen Unterraum von Vektoren x
R
f
¨
ur die
Ax
R
= 0
gilt. Es gibt also ein Kontinuum von Ruhelagen. Ein einfaches Beispiel ist das
System
˙x =
01
00
x +
0
1
u,
das aus zwei Integratoren besteht, also die
¨
Ubertragungsfunktion 1/s
2
besitzt.
Offensichtlich bilden alle Zust
¨
ande
x
R
=
a
0
,a∈ IR,
Ruhelagen. D. h., die x
1
-Achse bildet ein Kontinuum von Ruhelagen, wie es
Bild 1.7 illustriert.
Angemerkt sei, dass f
¨
ur u = c und det(A) = 0 der Fall auftreten kann, dass
keine Ruhelage existiert. N
¨
amlich dann, wenn Ax = −Bc ein
¨
uberbestimmtes
Gleichungssystem ist. Ein lineares System hat also entweder eine, keine oder
ein Kontinuum von Ruhelagen. Der Fall mehrerer isolierter Ruhelagen, wie er
bei nichtlinearen Systemen m
¨
oglich ist, kommt nicht vor.
1.1.6 Stabilit
¨
at von Ruhelagen
Als stabil bezeichnet man eine Ruhelage, wenn alle Trajektorien x(t), die
in einer Umgebung der Ruhelage beginnen, mit zunehmender Zeit in diese

10 Kapitel 1. Grundlagen nichtlinearer Systeme
Ruhelage hineinlaufen. In einer abgeschw
¨
achten Version benutzt man den Be-
griff stabil auch dann noch, wenn die Trajektorien zwar nicht in die Ruhelage
laufen, aber in einer n
¨
aheren Umgebung der Ruhelage verbleiben.
Wir betrachten im Weiteren zuerst einige Beispiele stabiler und instabiler
Ruhelagen, um einen Eindruck zu bekommen und ein erstes Verst
¨
andnis zu
entwickeln. Am einfachsten gelingt dies anhand linearer Systeme ˙x = Ax mit
der Ruhelage x
R
= 0.DaindenL
¨
osungen x(t) linearer Differenzialgleichun-
gen ˙x = Ax nur Terme
e
λ
i
t
und t
k
e
λ
j
t
mit k ∈{1, 2, 3,...}
enthalten sind, laufen alle Trajektorien x(t) des Systems f
¨
ur t →∞offen-
sichtlich in die Ruhelage x
R
= 0,wennf
¨
ur jeden Eigenwert λ
i
des Systems
Re {λ
i
} < 0
gilt. Man bezeichnet dann nicht nur die Ruhelage, sondern auch das System
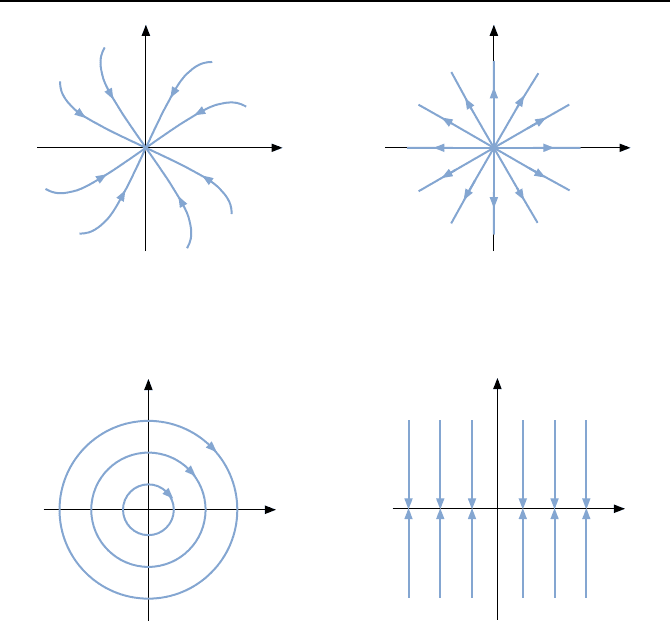
als stabil. Bild 1.8 zeigt die Trajektorien eines solchen linearen Systems.
Gilt dagegen f
¨
ur mindestens einen Eigenwert
Re {λ
i
} > 0,
so ist die Ruhelage instabil, denn dann streben Trajektorien von ihr weg.
Daher wird ein solches lineares System auch als instabil bezeichnet. Bild 1.9
zeigt ein Beispiel.
F
¨
ur den Fall eines Systems mit einem Paar konjugiert komplexer Eigen-
werte λ
1/2
= ±j liegt ein harmonischer Oszillator vor, dessen Trajektorien
Bild 1.10 zeigt. Offensichtlich laufen die Trajektorien weder in die Ruhelage
x
R
= 0 noch ins Unendliche. Auch hier besitzt die Ruhelage x
R
= 0 also
noch eine gewisse Stabilit
¨
at.
¨
Ahnlich gelagert ist der Fall eines Systems zwei-
ter Ordnung mit einem Eigenwert λ
1
= 0 und einem Eigenwert λ
2
< 0, wie
ihn Bild 1.11 veranschaulicht. Zwar laufen alle Trajektorien in eine Ruhelage
auf der x
1
-Achse, aber keine Ruhelage zieht alle Trajektorien an. Es laufen al-
lerdings auch keine Trajektorien ins Unendliche, weshalb man solche Systeme
oft auch noch als stabil bezeichnet.
Um einen ersten Eindruck der Stabilit
¨
atsverh
¨
altnisse bei nichtlinearen Sys-
temen zu bekommen, wird das System
˙x
1
= x
1
(x
2
− 1),
˙x
2
= x
2
(x
1
− 1)
(1.6)
als Beispiel betrachtet. Es besitzt zwei Ruhelagen bei
x
R1
=
0
0
und x
R2
=
1
1
.
Hier zeigt sich der schon erw
¨
ahnte Unterschied zu linearen Systemen. Es gibt
zwei isolierte Ruhelagen. Das ist bei linearen Systemen nicht m
¨
oglich. Sie be-
sitzen entweder eine Ruhelage in x
R
= 0 oder ein Kontinuum von Ruhelagen.
1.1. Systembeschreibung und Systemverhalten 11
x
2
x
1
Bild 1.8: Trajektorien eines stabilen li-
nearen Systems, d. h. mit Re {λ
1
} < 0,
Re {λ
2
} < 0.
x
2
x
1
Bild 1.9: Trajektorien eines instabilen li-
nearen Systems mit Eigenwerten λ
1
, λ
2
,
wobei Re {λ
1
} > 0, Re {λ
2
} > 0.
x
2
x
1
Bild 1.10: Trajektorien eines harmoni-
schen Oszillators, d. h. mit λ
1/2
= ±j.
x
2
x
1
Bild 1.11: Trajektorien eines Systems
mit λ
1
= 0 und λ
2
< 0.
Bild 1.12 gibt den Verlauf der Trajektorien des Systems (1.6) im Umfeld
der Ruhelagen wieder. Die Trajektorien streben in die Ruhelage x
R1
= 0
hinein. Man kann diese Ruhelage als stabil bezeichnen. Von der Ruhelage
x
R2
=[11]
T
streben Trajektorien weg ins Unendliche, d. h., die Ruhelage
muss als instabil angesehen werden.
Das Beispiel zeigt, dass man nichtlineare Systeme im allgemeinen Fall nicht
als stabil oder instabil bezeichnen kann, wie es bei linearen Systemen m
¨
oglich
ist. Man muss vielmehr das Stabilit
¨
atsverhalten des Systems in der Umge-
bung einer Ruhelage betrachten, d. h. das Stabilit
¨
atsverhalten der Ruhelage.
In diesem Zusammenhang besteht Kl
¨
arungsbedarf zu
(1) dem Verhalten der Trajektorien in der Umgebung einer Ruhelage,
(2) der Gr
¨
oße des Gebiets um eine Ruhelage herum, in dem alle in diesem
Gebiet startenden Trajektorien in die Ruhelage streben, und
(3) der mathematischen Definition der Stabilit
¨
at einer Ruhelage.

12 Kapitel 1. Grundlagen nichtlinearer Systeme
-2
-1
0
1
2
-2 - 1
0
12
Zustand x
1
Zustand x
2
Bild 1.12: Verlauf der Trajektorien des
Systems (1.6).
x
2
x
1
˜x
1
˜x
2
x
R
Bild 1.13: Transformation einer Ruhe-
lage x
R
in den Ursprung.
Bevor die obigen drei Probleme gekl
¨
art werden, soll noch eine Vereinfa-
chung der Betrachtungen durchgef
¨
uhrt werden. Hat man eine Ruhelage x
R
f
¨
ur ein System ermittelt, so kann man sie durch die Transformation
x = x
R
+ ˜x
in den Ursprung, also nach ˜x = 0, verschieben. Die Systemgleichungen sind
dann durch
˙
˜x = f (x
R
+ ˜x, u)=
˜
f(˜x, u),
y = g(x
R
+ ˜x, u)=˜g(˜x, u)
gegeben. Da diese Transformation immer m
¨
oglich ist, wird im Weiteren ange-
nommen, dass die interessierende Ruhelage nach null verschoben wurde. Das
Bild 1.13 illustriert die Transformation.
Um das Verhalten der Trajektorien eines Systems in der N
¨
ahe der Ruhelage
x
R
= 0 zu kennzeichnen, wird zuerst einmal der Begriff der Attraktivit
¨
at
eingef
¨
uhrt.
Definition 2 (Attraktivit
¨
at). Ein System
˙x = f(x, u)
besitze die Ruhelage x
R
= 0. Dann heißt die Ruhelage x
R
= 0 lokal attraktiv,
wenn es eine Umgebung U (0) der Ruhelage gibt, so dass jeder Anfangswert
x
0
∈ U(0)
zu einer Trajektorie x(t) des freien Systems, d. h. u = 0,f
¨
uhrt, die mit t→∞
in die Ruhelage x
R
= 0 strebt.