J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.

64 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Wie auch aus Bild 2.17 abzulesen ist, ergibt sich eine hohe Amplitude der
Schwingung, die nat
¨
urlich f
¨
ur ein Kraftfahrzeug indiskutabel ist. Beseitigt
werden kann der Grenzzyklus durch eine Erweiterung der Regelung [102].
2.2 Absolute Stabilit
¨
at
2.2.1 Der Begriff der absoluten Stabilit
¨
at
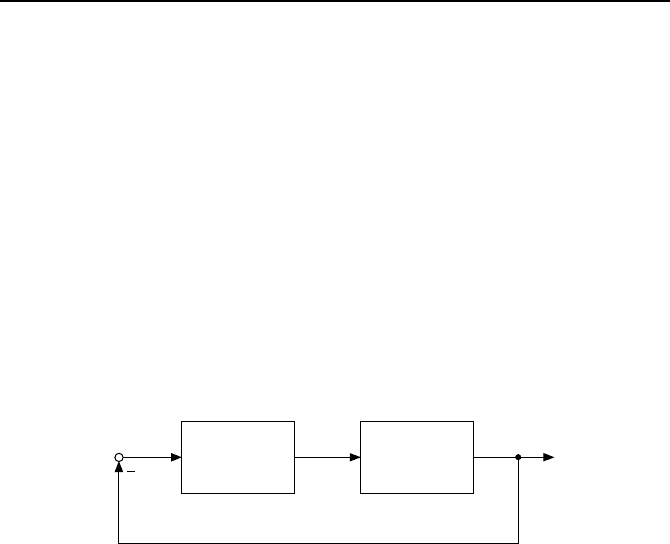
Im vorherigen Kapitel wurde der nichtlineare Standardregelkreis, den Bild
2.18 noch einmal zeigt, auf Grenzzyklen hin untersucht. Es ist nat
¨
urlich auch
von Interesse, wie das Stabilit
¨
atsverhalten geartet ist, wenn keine Grenzzyklen
vorliegen. Beispielsweise ist es von großer praktischer Bedeutung, feststellen
zu k
¨
onnen, f
¨
ur welche Kennlinien f der Regelkreis eine global asymptotisch
stabile Ruhelage besitzt.
eu
y
u = f (e)
G(s)
Kennlinie
Regelstrecke
Bild 2.18: Nichtlinearer Standardregelkreis.
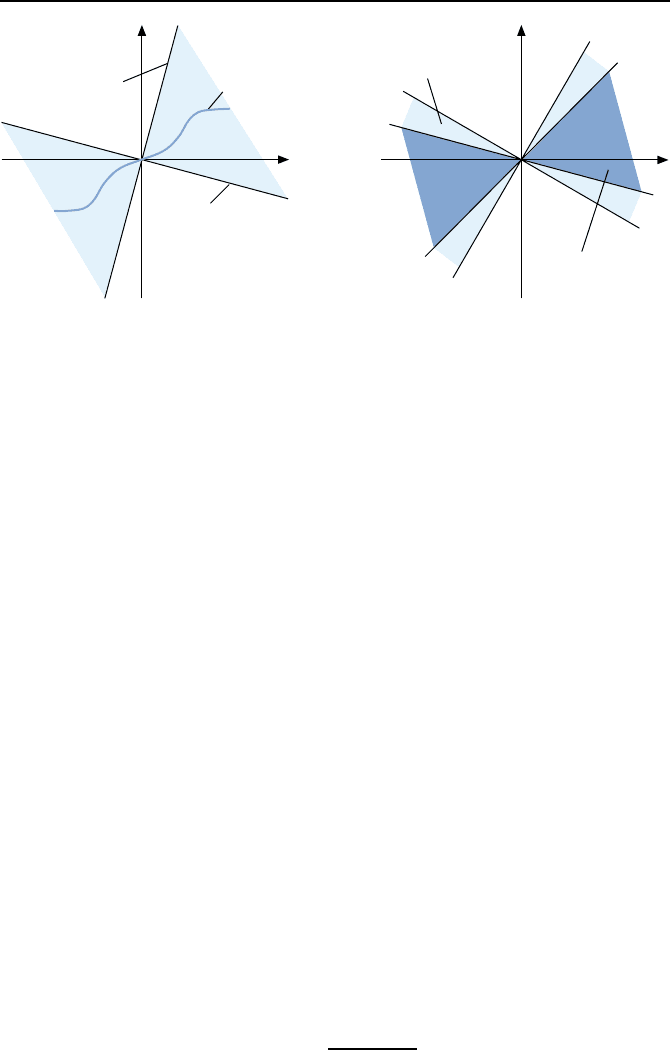
Dieser Frage soll im Weiteren nachgegangen werden, wobei wir uns auf
Kennlinien beschr
¨
anken, die in einem Sektor liegen, der durch zwei Gera-
den u = K
1
e und u = K
2
e begrenzt ist. In Bild 2.19 ist dieser Sektor dar-
gestellt und man bezeichnet ihn kurz, wie es bei Intervallen
¨
ublich ist, mit
[K
1
,K
2
]. Passend zu diesem Sektor [K
1
,K
2
]f
¨
uhrt man nun einen neuen Sta-
bilit
¨
atsbegriff ein.
Definition 7 (Absolute Stabilit
¨
at). Der nichtlineare Standardregelkreis
Y (s)=G(s)U(s),
e = −y,
u = f(e)
heißt absolut stabil im Sektor
[K
1
,K
2
],
wenn er f
¨
ur jede eindeutige, st
¨
uckweise stetige und f
¨
ur alle Werte e definierte
Kennlinie
u = f (e),
die in diesem Sektor liegt, eine global asymptotisch stabile Ruhelage besitzt.
2.2. Absolute Stabilit
¨
at 65
u
e
u = K
1
e
u = K
2
e
u = f (e)
Bild 2.19: Kennliniensektor, begrenzt
durch u = K
1
e und u = K
2
e.
u
e
Hurwitz-Sektor
Sektor absoluter
Stabilit
¨
at
Bild 2.20: Hurwitz-Sektor und Sektor
absoluter Stabilit
¨
at.
¨
Uber die Gr
¨
oße des Sektors der absoluten Stabilit
¨
at l
¨
asst sich bereits eine
erste Absch
¨
atzung treffen. Betrachtet man n
¨
amlich nur lineare Kennlinien
u = f (e)=
˜
K · e,
so kann z. B. mittels des Routh-Kriteriums oder des Wurzelortskurvenverfah-
rens der Parameterbereich
[
˜
K
1
,
˜
K
2
] (2.4)
ermittelt werden, f
¨
ur den sich ein stabiler linearer Regelkreis ergibt. Der Sektor
(2.4) heißt Hurwitz-Sektor und offensichtlich ist der Sektor absoluter Stabi-
lit
¨
at immer kleiner oder gleich dem Hurwitz-Sektor. Bild 2.20 illustriert die
Situation.
2.2.2 Das Popov-Kriterium und seine Anwendung
Ein Kriterium zum Nachweis absoluter Stabilit
¨
at wurde 1959 von V. M. Popov
entwickelt [116, 149, 150, 151, 152]. F
¨
ur seine Formulierung muss man zuerst
noch den Begriff der Grenzstabilit
¨
at definieren.
Definition 8 (Grenzstabilit
¨
at). Ein lineares System mit der
¨
Ubertragungs-
funktion G(s) heißt grenzstabil, wenn es nur Polstellen p
i
mit
Re {p
i
}≤0
besitzt, wobei mindestens f
¨
ur einen Pol Re {p
i
} =0gilt, und wenn der lineare
Regelkreis
G
ε
(s)=
G(s)
1+εG(s)
f
¨
ur jedes beliebig kleine ε>0 stabil ist.

66 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Im
Re
Wurzelortskurve
Bild 2.21: Beispiel f
¨
ur die Wurzelortskurven eines grenzstabilen Systems.
Anschaulich bedeutet die Grenzstabilit
¨
at eines Systems, dass die
¨
Aste der
Wurzelortskurve, die auf der imagin
¨
aren Achse starten, mit wachsendem ε
nach links laufen, wie es Bild 2.21 exemplarisch illustriert.
Popovs Kriterium lautet nun wie folgt.
Satz 1 (Popov-Kriterium). Gegeben sei der nichtlineare Standardregel-
kreis
Y (s)=G(s)U(s),
e = −y,
u = f(e)
mit der stabilen oder grenzstabilen Regelstrecke G(s).DerZ
¨
ahlergrad m von
G(s) sei kleiner als der Nennergrad n. Die Kennlinie u = f(e) sei st
¨
uckweise
stetig, eindeutig, f
¨
ur alle e definiert und gehe durch null. Dann ist der obige
Regelkreis absolut stabil
(1) im Sektor [0,K],wennG(s) stabil ist,
(2) im Sektor [ε, K] mit einem beliebig kleinen ε>0,wennG(s) grenzstabil
ist,
falls sich eine reelle Zahl q finden l
¨
asst, so dass die Popov-Ungleichung
Re {(1 +
q · jω) · G(jω)} > −
1
K
f
¨
ur alle ω ≥ 0 erf
¨
ullt ist.
Zwei Sachverhalte in diesem Kriterium bed
¨
urfen der Erl
¨
auterung. Zum
einen die Einschr
¨
ankung des Anwendungsbereiches auf Sektoren [0,K]bzw.
[ε, K] und zum anderen die Popov-Ungleichung.
Zuerst soll der Anwendungsbereich n
¨
aher betrachtet werden. Die Unter-
scheidung in die Sektoren [0,K]f
¨
ur stabile G(s) und [ε, K]f
¨
ur grenzstabile
G(s)erkl
¨
art sich daraus, dass eine grenzstabile Strecke G(s) und eine Kenn-
linie
2.2. Absolute Stabilit
¨
at 67
u =0· e
einen Regelkreis ergeben, der nicht global asymptotisch stabil ist. Es bedarf
mindestens einer Verst
¨
arkung ε,also
u = ε · e,
um den Kreis zu stabilisieren.
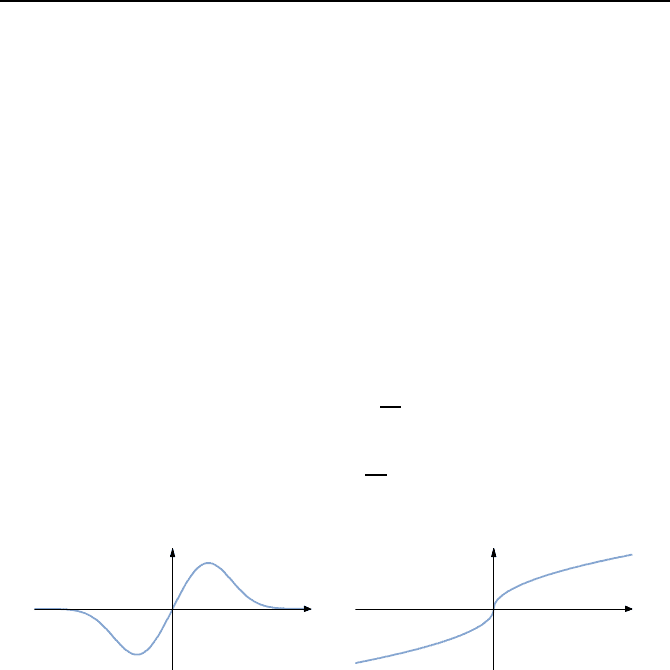
Die Unterscheidung zwischen den Sektoren [0,K] und [ε, K]hatdesWei-
teren Auswirkungen auf die behandelten Kennlinien u = f(e). So gibt es
Kennlinien, die zwar in [0,K] aber nicht in [ε, K] liegen. Dies ist auch der
Fall, wenn ε>0 beliebig klein sein darf. Zur Erl
¨
auterung betrachten wir zwei
Beispiele. Im ersten, dargestellt in Bild 2.22, strebt die Kennlinie u = f (e)
mit e →∞gegen null, erreicht den Wert null aber nicht. Offensichtlich gibt
es keinen Sektor [ε, K], dessen Gerade u = ε ·e die Kennlinie nicht schneidet.
Im zweiten Beispiel, illustriert in Bild 2.23, strebt
u =sgn(e)
|e|
mit e →∞gegen ∞,jedochschw
¨
acher als irgendeine Gerade u = ε · e.So
wird auch hier die Kennlinie u =sgn(e)
|e| in keinem Sektor [ε, K] liegen.
u
e
Bild 2.22: Kennlinie, die f
¨
ur e →∞
gegen null strebt.
u
e
Bild 2.23: Kennlinie, die f
¨
ur e →∞
gegen ∞ strebt.
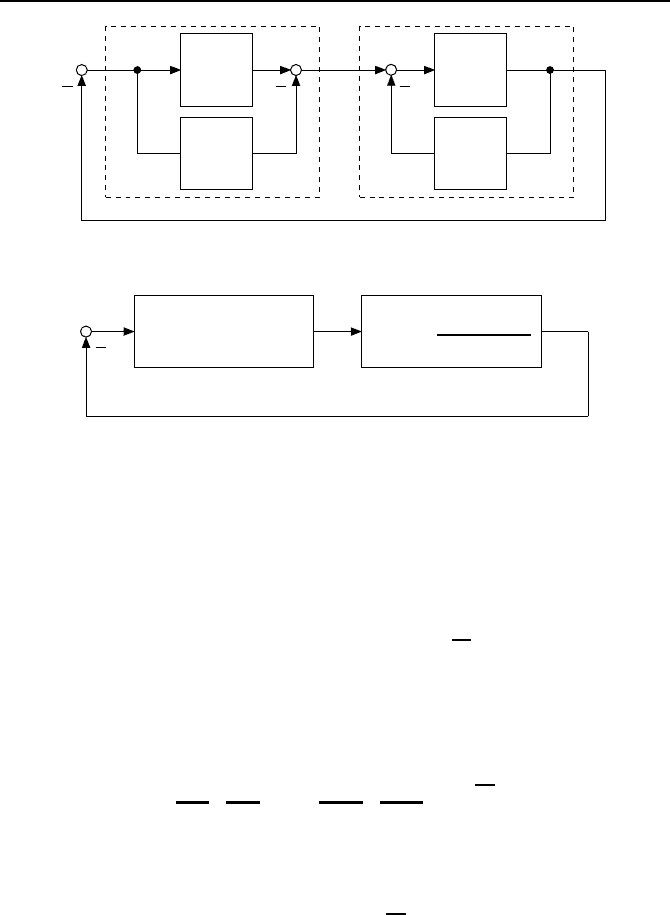
Die Einschr
¨
ankung auf Sektoren [0,K] anstelle [K
1
,K
2
] ist nur scheinbar.
Denn durch eine Umformung des betrachteten Regelkreises aus Bild 2.18, bei
dem wir den Sektor [K
1
,K
2
]betrachten,l
¨
asst sich erreichen, dass K
1
= 0 gilt.
Und zwar f
¨
ugt man zwei Faktorglieder mit der Verst
¨
arkung K
1
, wie in Bild
2.24 gezeigt, in den Regelkreis ein. Ersichtlich heben sich beide Faktorglieder
in ihrer Wirkung auf, so dass man den Regelkreis nicht ver
¨
andert hat. Man
fasst nun die Teilsysteme zusammen und erh
¨
alt den Regelkreis des Bildes 2.25.
Somit hat man f
¨
ur diesen umgeformten Regelkreis als Sektor
[K
1
− K
1
,K
2
− K
1
]=[0,K = K
2
− K
1
]
zu betrachten. Durch diese Transformation k
¨
onnen des Weiteren instabile Re-
gelstrecken stabilisiert werden, so dass das Kriterium von Popov auch auf
solche Regelstrecken anwendbar ist.
68 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
f(e)
G(s)
K
1
K
1
e
u
y
Bild 2.24: Einf
¨
ugen eines Faktors K
1
in den nichtlinearen Standardregelkreis.
e
u
y
ˆ
f(e)=f(e) −K
1
e
ˆ
G(s)=
G(s)
1+K
1
G(s)
Bild 2.25: In einen nichtlinearen Standardregelkreis umgeformter Regelkreis aus Bild
2.24.
Nachdem der Anwendungsbereich des Kriteriums von Popov gekl
¨
art ist,
wenden wir uns seiner Anwendung zu. Und zwar ist zu pr
¨
ufen,obsicheine
reelle Zahl q finden l
¨
asst, so dass die Popov-Ungleichung
Re {(1 + q · jω) ·G(jω)} > −
1
K
f
¨
ur alle ω ≥ 0erf
¨
ullt ist.
Die L
¨
osung der Popov-Ungleichung l
¨
asst sich grafisch darstellen. Um das
zu erkennen, formt man sie erst einmal um in
Re {G(jω)}
X(ω)
−q · ω Im {G(jω)}
Y (ω)
> −
1
K
.
Nun hat man eine in ω parametrierte Ungleichung
X(ω) − q · Y (ω)+
1
K
> 0. (2.5)
Sie ist f
¨
ur alle Wertepaare (X, Y ), die rechts der Geraden
X − q · Y +1/K =0
liegen, erf
¨
ullt. Diese Gerade besitzt die Steigung 1/q und den Schnittpunkt
−1/K mit der reellen Achse. Bild 2.26 illustriert dies. Die Gerade wird Popov-
Gerade genannt.

2.2. Absolute Stabilit
¨
at 69
X − qY > −
1
K
Steigung
1
q
X
Y
−
1
K
Bild 2.26: Sektor (blau), in dem X − qY > −1/K erf
¨
ullt ist.
Allerdings sind nicht alle Werte von X und Y in Gl. (2.5) erlaubt, da sie
ja
¨
uber
X(ω)=Re{G(jω)},
Y (ω)=ω Im {G(jω)}
(2.6)
parametriert sind. Die durch die Gl. (2.6) gegebene Kurve ist in einem Dia-
gramm darstellbar. Sie
¨
ahnelt einer Ortskurve, wenn man
˜
G(jω)=X(ω)+jY (ω)=Re{G(jω)} + jω Im {G(jω)}
setzt. Man bezeichnet diese Ortskurve als Popov-Ortskurve. Sie geht aus der
Ortskurve von G(jω) durch Multiplikation des Imagin
¨
arteils von G(jω)mitω
hervor. Grafisch betrachtet wird die Ortskurve G(jω) der Regelstrecke also in
Richtung der imagin
¨
aren Achse ver
¨
andert. Der Realteil dagegen erf
¨
ahrt keine
Ver
¨
anderung. Siehe hierzu Bild 2.27.
Die f
¨
ur X und Y m
¨
oglichen Werte sind also durch Gl. (2.6) gegeben bzw.
liegen auf der Popov-Ortskurve. Damit erh
¨
alt man folgendes grafisch darstell-
bares Ergebnis. Die Popov-Ungleichung ist erf
¨
ullt, wenn die Popov-Ortskurve
rechts einer Geraden mit der beliebigen Steigung 1/q und dem Schnittpunkt
−1/K mit der X-Achse, d. h. reellen Achse, liegt.
Mit dem obigen grafischen Verfahren ist die Popov-Ungleichung also
l
¨
osbar. Offensichtlich erf
¨
ullen alle links der Popov-Ortskurve liegenden Gera-
den die Ungleichung. Aus ihnen sind der Wert −1/K und damit die Sektoren
absoluter Stabilit
¨
at
[0,K]bzw. [ε, K]
direkt ablesbar. Selbstverst
¨
andlich ist man daran interessiert, den gr
¨
oßtm
¨
ogli-
chen Sektor zu bestimmen. Zu diesem Zweck schiebt man die Popov-Gerade so

70 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Popov-
Gerade
Popov-
Ortskurve
beliebige
Steigung
1
q
−
1
K
G(jω)
ω =1
Re
Im
Bild 2.27: Die Ortskurve, die Popov-
Ortskurve und eine m
¨
ogliche Popov-
Gerade.
kritische
Popov-Gerade
Popov-
Ortskurve
−
1
K
P
Re
Im
Bild 2.28: Die kritische Popov-Gerade
tangiert die Popov-Ortskurve und lie-
fert so den gr
¨
oßten Popov-Sektor.
an die Popov-Ortskurve heran, dass sie diese tangiert und sich das gr
¨
oßtm
¨
ogliche
K = K
P
ergibt, so wie es Bild 2.28 zeigt. Der zugeh
¨
orige Sektor
[0,K
P
]
heißt Popov-Sektor. Der Regelkreis ist dann f
¨
ur alle Sektoren
[0,K < K
P
]bzw. [ε, K < K
P
]
absolut stabil. F
¨
ur den Popov-Sektor [0,K
P
] selbst ist absolute Stabilit
¨
at
durch das Kriterium von Popov nicht nachgewiesen, denn in der Popov-
Ungleichung steht ein Gr
¨
oßer-Zeichen und kein Gr
¨
oßer-gleich-Zeichen. Diese
Unterscheidung ist allerdings in der Praxis nicht von Bedeutung, denn man
wird im Falle einer Realisierung immer einen Sicherheitsabstand zum kriti-
schen Wert K
P
einhalten.
Angemerkt sei, dass das Popov-Kriterium nat
¨
urlich auch anwendbar ist,
wenn der Regelkreis in der Form
˙x = Ax − bf (c
T
x)
vorliegt.
Schließlich seien noch zwei Erweiterungen des Popov-Kriteriums aufge-
f
¨
uhrt. Das Popov-Kriterium ist auch dann anwendbar, wenn G(s)dieForm
G(s)=
ˆ
G(s) · e
−Ts
hat und
ˆ
G(s) stabil ist. Allerdings sind dann nur noch positive Werte q in
der Popov-Ungleichung zul
¨
assig und die Nichtlinearit
¨
at muss stetig sein. F
¨
ur

2.2. Absolute Stabilit
¨
at 71
den Fall, dass die Nichtlinearit
¨
at zeitvariant ist, d. h., u = f(e, t) gilt, ist das
Popov-Kriterium ebenfalls anwendbar. Allerdings gelten dann zus
¨
atzlich fol-
gende Einschr
¨
ankungen:
(1) 0 <f(e, t) <Ke,
(2) G(s) besitzt h
¨
ochstens einen Pol s = 0 und ansonsten nur Pole s
i
mit
Re {s
i
} < 0 und
(3) q =0.
Die Forderung q = 0 impliziert, dass die Popov-Gerade senkrecht ist.
2.2.3 Aisermans Vermutung
Bei vielen Systemen ist die Anwendung des Popov-Kriteriums unn
¨
otig. Denn
f
¨
ur sie gilt Aisermans Vermutung, dass der gr
¨
oßte Sektor absoluter Stabilit
¨
at
dem Hurwitz-Sektor entspricht, der viel einfacher zu bestimmen ist. Wenn
die Vermutung auch im allgemeinen Fall nicht richtig ist, so stimmt sie doch
zumindest f
¨
ur folgende Regelstrecken:
(1) stabile und grenzstabile Systeme erster Ordnung,
(2) stabile und grenzstabile Systeme zweiter Ordnung mit
G(s)=
1+bs
1+a
1
s + a
2
s
2
bzw. G(s)=
1
s
·
1+bs
1+as
mit jeweils b ≥ 0,
(3) stabile Systeme dritter Ordnung mit
G(s)=
1+bs
1+a
1
s + a
2
s
2
+ a
3
s
3
,b≥ 0,
oder grenzstabile mit
G(s)=
1
s
·
1+bs
1+a
1
s + a
2
s
2
,b≥ 0,
(4) Systeme vierter Ordnung ohne Nullstellen mit h
¨
ochstens einem Pol s =0
und sonst nur reellen negativen Polen.
Zumindest f
¨
ur obige Regelstrecken kann man also den gr
¨
oßten Sektor absolu-
ter Stabilit
¨
at durch Bestimmung des Hurwitz-Sektors einfach ermitteln.
Wir betrachten als ein die obigen Betrachtungen erg
¨
anzendes Beispiel die
Regelstrecke
G(s)=
1
(s
2
+0.1s + 10)(s
2
+0.2s + 20)
.
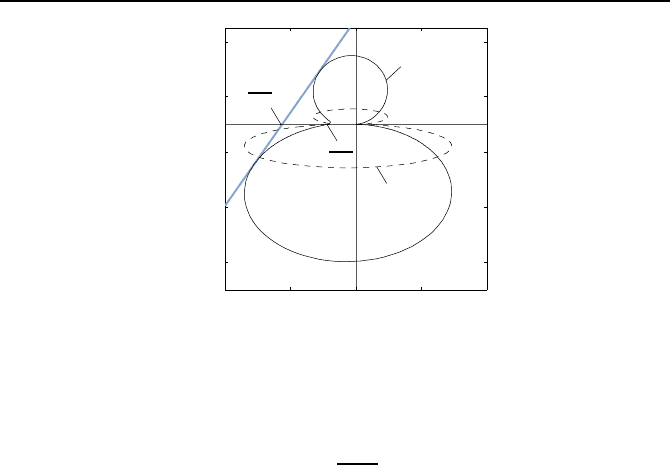
Im Bild 2.29 sind ihre Ortskurve und Popov-Ortskurve dargestellt, so dass
man den Popov-Sektor zu [0,K
P
≈ 8.7] ablesen kann. Aus der Ortskurven-
darstellung erkennt man auch, dass der Hurwitz-Sektor mit der maximalen
Steigung K
H
gr
¨
oßer ist als der Popov-Sektor, denn es gilt
72 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Re
Im
0.6
0.2
-0.2
-0.6
-1
-0.2
-0.10
0.1
0.2
Popov-
Ortskurve
−
1
K
P
G(jω)
−
1
K
H
Bild 2.29: Beispiel f
¨
ur ein System, bei dem der Hurwitz-Sektor [0,K
H
]gr
¨
oßer ist als
derPopov-Sektor[0,K
P
].
K
P
≈ 8.7 <
1012
45
= K
H
.
Aus der Tatsache, dass der Popov-Sektor kleiner ist als der Hurwitz-Sektor,
k
¨
onnen wir allerdings noch nicht schließen, dass der Sektor absoluter Stabi-
lit
¨
at kleiner ist als der Hurwitz-Sektor. Denn der Beweis [171] des Popov-
Kriteriums sichert nur seinen hinreichenden Charakter und wir wissen nicht,
ob es den gr
¨
oßten Sektor absoluter Stabilit
¨
at geliefert hat. Aisermans Vermu-
tung k
¨
onnte f
¨
ur das obige System also immer noch stimmen. Wie erw
¨
ahnt,
stimmt sie nicht f
¨
ur jedes System [35, 48, 103, 146]. Dies ist aber im Einzelfall
schwer nachzuweisen. Es bleibt folgende generelle Absch
¨
atzung festzuhalten:
Popov-Sektor ≤ gr
¨
oßter Sektor absoluter Stabilit
¨
at ≤ Hurwitz-Sektor.
Mit dem Popov-Kriterium ist Aisermans Vermutung (f
¨
ur bestimmte Re-
gelstrecken) daher nur beweisbar, wenn der Popov-Sektor dem Hurwitz-Sektor
entspricht. Bis heute weder bewiesen noch widerlegt ist, ob der Popov-Sektor
immer gleich dem gr
¨
oßten Sektor absoluter Stabilit
¨
at ist.
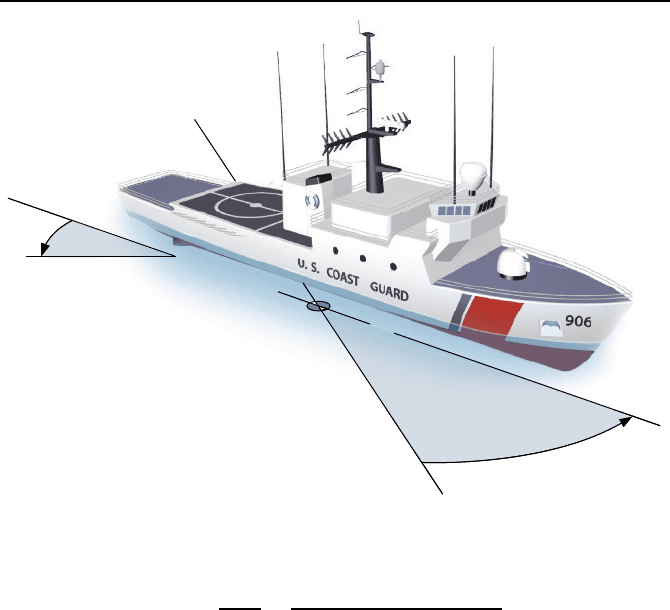
2.2.4 Beispiel Schiffsregelung
Als Anwendungsbeispiel wird eine Kursregelung des Schiffes Tampa der US-
K
¨
ustenwache betrachtet, das in Bild 2.30 dargestellt ist. Die Regelung soll
so ausgelegt sein, dass bei einer
¨
Anderung des Kurswinkels ϕ von 10
◦
eine
Ausregelzeit von maximal 50 s bei einer Stellgr
¨
oßenbeschr
¨
ankung von ±10
◦
des
Ruderwinkels ϑ erzielt wird. Die Gierrate ˙ϕ wird
¨
uber ein Gyroskop gemessen.
Bild 2.30 illustriert die Aufgabe.
Die
¨
Ubertragungsfunktion G(s) der Tampa zwischen Ruderwinkel ϑ und
Gierrate ˙ϕ wurde experimentell [55] zu
2.2. Absolute Stabilit
¨
at 73
ϑ
ϕ
Bild 2.30: Schiff Tampa.
G(s)=
Ω(s)
Θ(s)
=
−0.0184(s +0.0068)
(s +0.2647)(s +0.0063)
ermittelt, wobei Ω(s) und Θ(s) die Laplace-Transformierten von ω =˙ϕ und
ϑ sind. Geregelt werden soll ϕ. Daher wird die mittels des Gyroskops gemes-
sene Gierrate ˙ϕ zu ϕ aufintegriert. Es wird eine Kaskadenregelung mit zwei
P-Reglern f
¨
ur Gierrate und -winkel verwendet. Der I-Anteil der Strecke stellt
sicher, dass es keine bleibende Regelabweichung gibt. Damit der Ruderwinkel
auf ±10
◦
beschr
¨
ankt bleibt, wird ein S
¨
attigungsglied vor die Strecke geschal-
tet. Den Regelkreis zeigt Bild 2.31. Die Regelungen sind so ausgelegt, dass
bei 10
◦
Kurs
¨
anderung die maximal auftretende Stellgr
¨
oße gerade 10
◦
betr
¨
agt.
F
¨
ur diesen Fall ist der Regelkreis linear. Bei gr
¨
oßeren Kurs
¨
anderungen l
¨
auft
die Stellgr
¨
oße in die S
¨
attigung, d. h., der Kreis wird nichtlinear.
Es stellt sich nun die Frage, ob der Regelkreis auch im nichtlinearen Fall
stabil ist. Um dies mittels des Popov-Kriteriums zu untersuchen, wird der
Regelkreis zun
¨
achst in die Form des nichtlinearen Standardregelkreises um-
geformt. Bild 2.32 zeigt das Ergebnis dieser Umformung. Da die Regelstrecke
einen Integrierer beinhaltet und grenzstabil ist, k
¨
onnen nur Sektoren [ε, K] un-
tersucht werden. Der Sektor [ε, K > 1] schließt jedoch die S
¨
attigungskennlinie
nicht mit ein, da sich ihre Parallele zur Abszisse immer mit jeder beliebigen
Geraden der Steigung ε>0 schneidet. Allerdings geschieht dies f
¨
ur kleine
Werte ε erst bei sehr großen Werten e.DieS
¨
attigungskennlinie liegt also