J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.

1.1. Systembeschreibung und Systemverhalten 13
Ist U(0)=IR
n
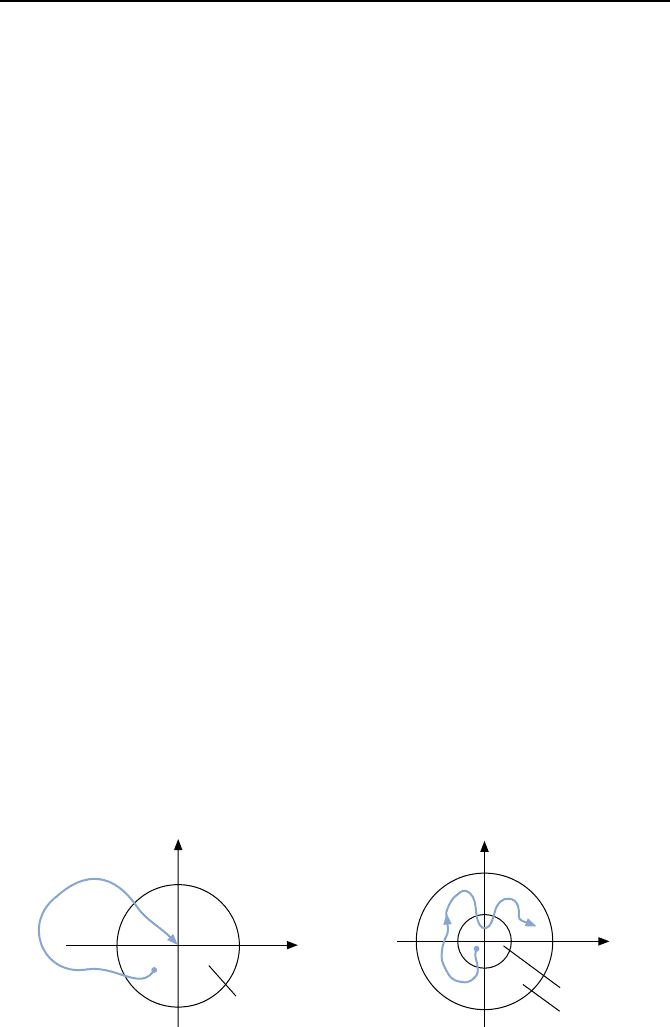
, so bezeichnet man die Ruhelage als global attraktiv . Bild
1.14 illustriert den Begriff der Attraktivit
¨
at. Die Attraktivit
¨
at einer Ruhelage
stellt sicher, dass jede in U(0) startende Trajektorie in die Ruhelage strebt.
Allerdings macht der Begriff der Attraktivit
¨
at keine Aussage dar
¨
uber, wie
weit sich die Trajektorie von der Ruhelage x
R
= 0 entfernt. Aus praktischer
Sicht heraus betrachtet kann dies problematisch sein. Schließlich m
¨
ochte man
bei realen Systemen auch meistens wissen, welche unter Umst
¨
anden gef
¨
ahrlich
großen Werte der Systemzustand x annehmen kann, bevor er in die Ruhelage
l
¨
auft. Der nachfolgende Stabilit
¨
atsbegriff ist diesbez
¨
uglich genauer.
Definition 3 (Stabilit
¨
at im Sinne von Ljapunov). Ein System
˙x = f(x, u)
besitze die Ruhelage x
R
= 0. Dann heißt die Ruhelage stabil im Sinne von
Ljapunov, wenn es zu jeder ε-Umgebung
U
ε
(0)={x ∈ IR
n
||x| <ε}
eine δ-Umgebung
U
δ
(0)={x ∈ IR
n
||x| <δ}
gibt, so dass alle Trajektorien des freien Systems, die in der δ-Umgebung
beginnen, d. h.
x(0) ∈ U
δ
(0),
in ihrem weiteren Verlauf in der ε-Umgebung bleiben, d. h.
x(t) ∈ U
ε
(0) f
¨
ur t>0.
Bild 1.15 veranschaulicht die obige Stabilit
¨
atsdefinition von Ljapunov.
Man beachte, dass die Trajektorien x(t) nicht zwingend in die Ruhelage x
R
=0
laufen m
¨
ussen, damit die Ruhelage stabil im Sinne von Ljapunov ist. Ein kon-
kretes Beispiel hierf
¨
ur ist der harmonische Oszillator
x
2
x
1
x
0
x(t)
U(0)
Bild 1.14: Lokal attraktive Ruhe-
lage.
x
2
x
1
U
δ
U
ε
Bild 1.15: Illustration zur Stabi-
lit
¨
atsdefinition von Ljapunov.
14 Kapitel 1. Grundlagen nichtlinearer Systeme
˙x =
01
−10
x,
dessen Trajektorien x(t) wir schon in Bild 1.10 sahen.
Ist die Ruhelage x
R
= 0 attraktiv und stabil im Sinne von Ljapunov, so
streben die Trajektorien aus ihrer Umgebung asymptotisch in die Ruhelage.
Entsprechend definiert man den Begriff der asymptotischen Stabilit
¨
at.
Definition 4 (Asymptotische Stabilit
¨
at). Ist die Ruhelage x
R
= 0 lo-
kal (global) attraktiv und stabil im Sinne von Ljapunov, so heißt sie (global)
asymptotisch stabil.
Bei einer asymptotisch stabilen Ruhelage x
R
sind des Weiteren Umgebun-
gen U(x
R
) von Interesse, in denen alle Trajektorien in die Ruhelage streben.
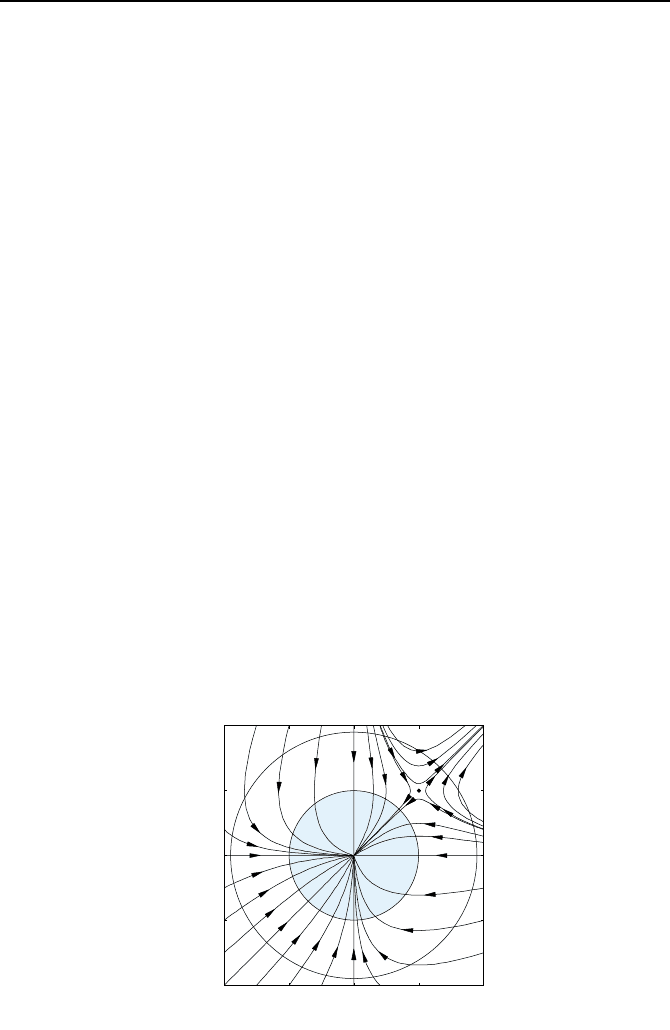
Nicht jede Umgebung besitzt diese Eigenschaft, wie das Beispiel aus Gl. (1.6)
und das zugeh
¨
orige Bild 1.16 veranschaulichen. In der Umgebung U
1
der Ru-
helage x
R
= 0 streben alle Trajektorien nach null. In der Umgebung U
2
ist
dies ersichtlich nicht der Fall.
Man definiert passend zu solchen Situationen den Begriff des Einzugsge-
bietes.
Definition 5 (Einzugsgebiet). Eine Umgebung einer asymptotisch stabi-
len Ruhelage heißt Einzugsgebiet der Ruhelage, wenn alle in diesem Gebiet
startenden Trajektorien in ihm verbleiben und im weiteren Verlauf in die Ru-
helage streben.
Gibt es nur eine Ruhelage und ist diese global asymptotisch stabil, so ist der
gesamte Zustandsraum Einzugsgebiet. Da das Stabilit
¨
atsverhalten des gesam-
ten Systems in diesem Fall durch diese Ruhelage gekennzeichnet ist, kann dann
auch wie im linearen Fall das System als global asymptotisch stabil bezeichnet
werden.
-2
-1
0
1
2
-2 -1
0
12
U
1
U
2
Zustand x
1
Zustand x
2
Bild 1.16: Asymptotisch stabile Ruhelage x
R
= 0 und ein Einzugsgebiet U
1
(blau).
Die Umgebung U
2
ist kein Einzugsgebiet.
1.1. Systembeschreibung und Systemverhalten 15
1.1.7 Grenzzyklen
In nichtlinearen Systemen k
¨
onnen, wie in linearen Systemen, Dauerschwingun-
gen auftreten. Bei diesen Schwingungen wiederholen sich die Systemzust
¨
ande
periodisch und die Trajektorie einer Dauerschwingung ist eine geschlossene
Kurve. Man bezeichnet diese Schwingungen als Grenzzyklen.
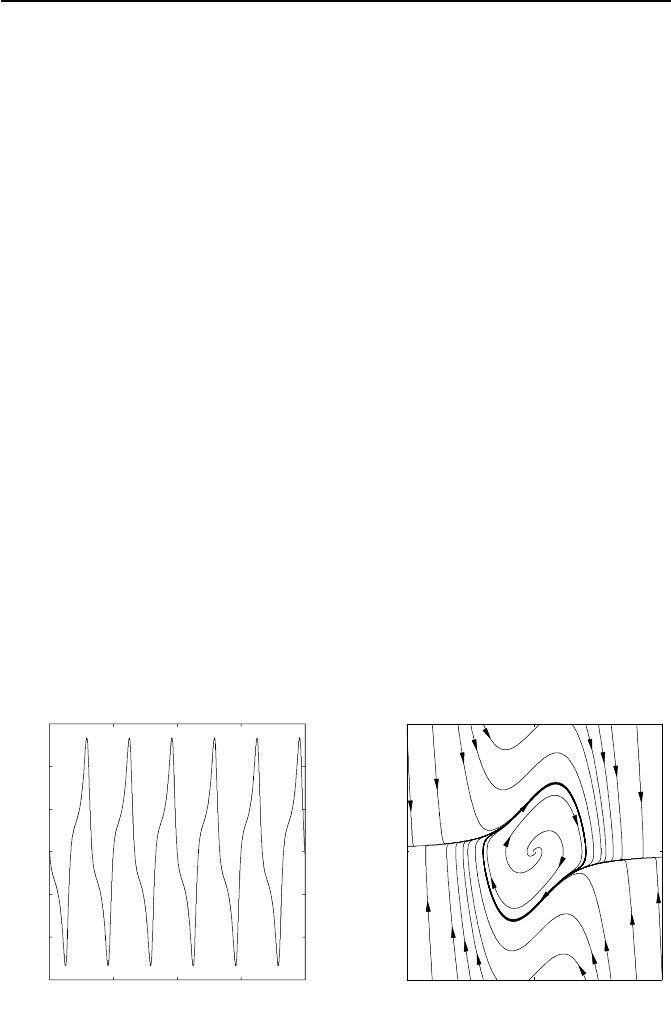
Als Beispiel zeigt Bild 1.17 die Dauerschwingung der Van-der-Pol-Differen-
zialgleichung
˙x
1
= x
2
,
˙x
2
= −x
1
+(1− x
2
1
)x
2
.
¨
Aquivalent zu obigem Zustandsraummodell ist die Differenzialgleichung
¨x
1
− (1 − x
2
1
)˙x
1
+ x
1
=0.
Die Van-der-Pol-Differenzialgleichung beschreibt z. B. das Verhalten eines
elektrischen Schwingkreises f
¨
ur Radiosender, der aus einer Triode, einem Kon-
densator, einer Spule und einem Widerstand besteht. Der Term (1 −x
2
1
)wirkt
dabei als nichtlineares D
¨
ampfungsglied. Man kann einen solchen Van-der-Pol-
Oszillator auch als Regelkreis mit e = −x
1
als Regelabweichung und mit der
nichtlinearen Kennlinie
u = f (e, ˙e)=−(1 − e
2
)˙e
als Regelgesetz darstellen. Die lineare Differenzialgleichung
¨x
1
+ x
1
= u
3
2
1
00
-1
-2
-3
5
-5
00
10 20 30 40 -5 5
Zustand x
1
Zeit t in s
Zustand x
1
Zustand x
2
Bild 1.17: Links ist der Zeitverlauf x
1
(t) und rechts sind die Trajektorien x(t) und
der Grenzzyklus der Van-der-Pol-Differenzialgleichung dargestellt.
16 Kapitel 1. Grundlagen nichtlinearer Systeme
eu
x
1
u = −(1 − e
2
)˙e
¨x
1
+ x
1
= u
Bild 1.18: Van-der-Pol-Oszillator, dargestellt als Regelkreis.
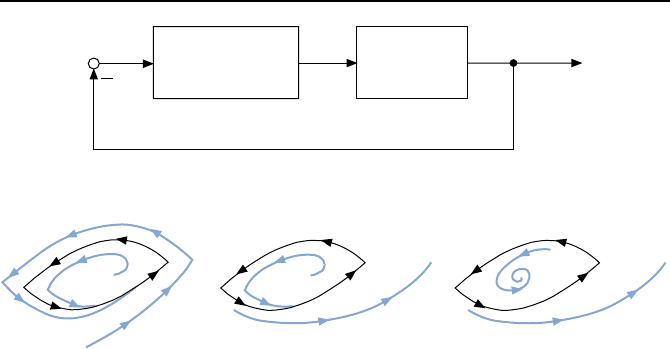
stabiler Grenzzyklus semistabiler Grenzzyklus instabiler Grenzzyklus
Bild 1.19: Grenzzyklen (schwarz) und ihr Stabilit
¨
atsverhalten.
bildet dann die Regelstrecke, wie in Bild 1.18 dargestellt. Die Aufgabe des
Regelkreises ist in diesem Fall nicht die Ausregelung der Trajektorie in eine
Ruhelage, sondern die Aufrechterhaltung einer Schwingung. Der Grenzzyklus
wird in diesem Beispiel also bewusst erzeugt.
Normalerweise sind Grenzzyklen in Regelkreisen allerdings unerw
¨
unscht.
Denn die Aufgabe eines Regelkreises ist im Allgemeinen das Konstanthalten
der Regelgr
¨
oße und nicht die Erzeugung von Schwingungen.
¨
Ahnlich wie bei Ruhelagen streben Trajektorien entweder in einen Grenz-
zyklus oder von ihm weg. Man kann also den Begriff der Stabilit
¨
at auf Grenz-
zyklen
¨
ubertragen. Drei F
¨
alle sind dabei zu unterscheiden: Im ersten Fall sind
es asymptotisch stabile Grenzzyklen, auf die alle Trajektorien der n
¨
aheren
Umgebung zulaufen. Beim zweiten Fall, dem semistabilen, laufen die Tra-
jektorien von einer Seite auf den Grenzzyklus zu und auf der anderen Seite
von ihm weg. Im dritten Fall entfernen sich alle Trajektorien aus der Um-
gebung des Grenzzyklus, so dass er als instabil bezeichnet wird. Bild 1.19
illustriert diese F
¨
alle. Bei linearen Systemen k
¨
onnen weder stabile, instabile
noch semistabile Grenzzyklen auftreten. Hier sind nur harmonische Oszilla-
toren m
¨
oglich, bei denen es unendlich viele geschlossene Trajektorien gibt.
Keine anderen Trajektorien n
¨
ahern oder entfernen sich von diesen.
Instabile und semistabile Grenzzyklen sind ohne praktische Bedeutung, da
aufgrund kleinster St
¨
orungen – die in einem realen System immer vorhanden
sind – der Grenzzyklus von der Trajektorie verlassen wird. Von regelungstech-
nischer Bedeutung ist also vor allem der stabile Grenzzyklus. Im Allgemeinen
ist er, wie erw
¨
ahnt, unerw
¨
unscht. Um Grenzzyklen in Regelkreisen aufzu-
sp
¨
uren, verwendet man das Verfahren der harmonischen Balance, das wir in
Kapitel 2.1 ausf
¨
uhrlich behandeln.
1.1. Systembeschreibung und Systemverhalten 17
1.1.8 Gleitzust
¨
ande
Außer Grenzzyklen k
¨
onneninnichtlinearenSystemenweitereVerhaltens-
weisen vorkommen, die in linearen Systemen nicht auftreten. Gleitzust
¨
ande
geh
¨
oren zu diesen Ph
¨
anomenen. Sie treten in Systemen mit unstetigem Ver-
halten auf, d. h. in Systemen ˙x = f (x, u) mit unstetigen Funktionen f .
Wir betrachten zur Erkl
¨
arung des Ph
¨
anomens Gleitzustand die Regel-
strecke
˙x =
01
−2 −3
x +
0
1
u,
y =
0.51
x,
die die
¨
Ubertragungsfunktion
G(s)=
s +0.5
(s +1)(s +2)
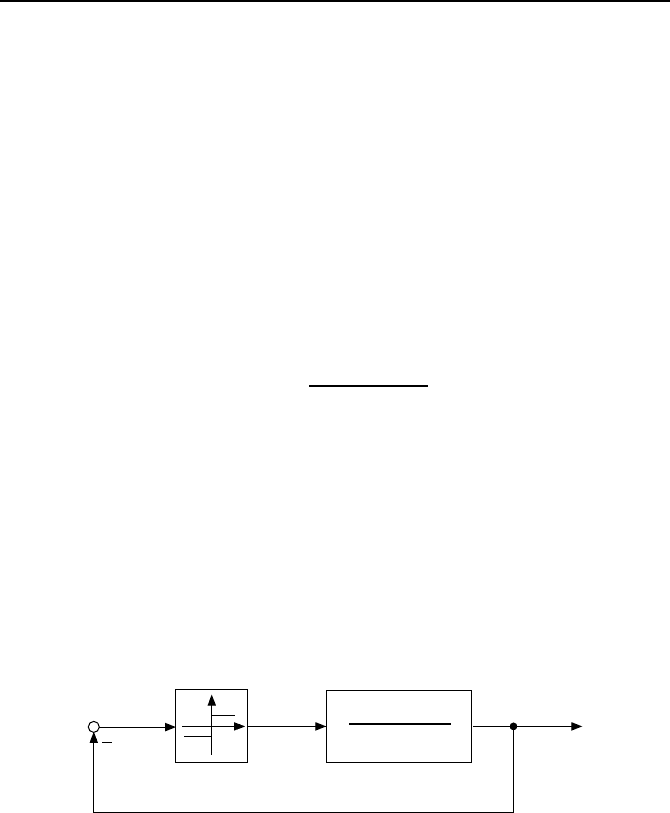
besitzt. Als Regler verwenden wir einen Zweipunktregler
u =sgn(−y).
Bild 1.20 zeigt den zugeh
¨
origen Regelkreis. Wir simulieren das System f
¨
ur
die Anfangswerte x
1
(0) = 1 und x
2
(0) = 1 und erhalten die in Bild 1.21
dargestellten Verl
¨
aufe von Stellgr
¨
oße u und Ausgangsgr
¨
oße y. Offensichtlich
strebt der Ausgangswert y gegen null. Die Stellgr
¨
oße u weist dabei allerdings
ab einem gewissen Punkt keinen konstanten Wert mehr auf, sondern schaltet
hochfrequent zwischen u = 1 und u = −1 hin und her.
1
-1
u
y
s+0.5
(s+1)(s+2)
Bild 1.20: Regelkreis mit Zweipunktregler.
Dieses Verhalten erkl
¨
art sich, wenn man die Trajektorien x(t) des Systems
in der Zustandsebene des Bildes 1.22 betrachtet und das Regelgesetz
u =sgn(−y)=−sgn(0.5x
1
+ x
2
)
analysiert. Dieses kann auch in der Form
u =
1f
¨
ur x
2
< −0.5x
1
,
−1f
¨
ur x
2
> −0.5x
1

18 Kapitel 1. Grundlagen nichtlinearer Systeme
Stellgr
¨
oße u(t)
Ausgangsgr
¨
oße y(t)
1.5
1
1
0.5
0.5
0
0
-0.5
-0.5
-1
00
0.20.20.40.40.60.60.80.8
11
y
u
Zeit t in s
Zeit t in s
Bild 1.21: Ausgangsgr
¨
oßenverlauf y(t) und Stellgr
¨
oßenverlauf u(t).
Trajektorien x(t)
Zustandsgr
¨
oßen x
1
(t) und x
2
(t)
Zustand x
2
Zustand x
1
x
1
und x
2
Zeit t in s
x
1
x
2
1
1
0.5
0.5
0
0
-0.5
-0.5
-1
1.5
00
24
6810-1 -0.50.51
Bild 1.22: Trajektorien x(t) und Gleitzustand auf der (blauen) Schaltgeraden sowie
Zustandsgr
¨
oßenverl
¨
aufe x
1
(t) und x
2
(t).
dargestellt werden. Offensichtlich ist unterhalb der Geraden
x
2
= −0.5x
1
(1.7)
der Stellgr
¨
oßenwert u = 1 aktiviert und oberhalb u = −1.
Die Trajektorien x(t) laufen von beiden Seiten auf die Gerade (1.7) zu.
Trifft eine Trajektorie auf die Gerade, wechselt sie kurz die Seite, die Stellgr
¨
oße
springt von u =1aufu = −1 oder umgekehrt und die Trajektorie l
¨
auft
wieder auf die Gerade zu. Sie wechselt erneut die Seite und das Spiel beginnt
von vorn. Dadurch tritt das bereits beobachtete hochfrequente Schalten der
Stellgr
¨
oße auf. Die Trajektorie selbst gleitet auf der Schaltgeraden, begleitet

1.1. Systembeschreibung und Systemverhalten 19
vom hochfrequenten Schalten der Stellgr
¨
oße, in die Ruhelage x
R
= 0.Aus
diesem Gleiten leitet sich auch der Begriff Gleitzustand ab.
Obiges Verhalten hat den Nachteil, dass das Stellglied, z. B. wenn es ein
Ventil oder ein anderer mechanischer Aktor ist, stark belastet wird und schnell
verschleißt. Meistens sind Gleitzust
¨
ande daher unerw
¨
unscht.
Der Gleitzustand hat aber auch einen Vorteil. Das Gleiten der Trajektorie
x(t) in die Ruhelage erfolgt, wie sich zeigen l
¨
asst, robust gegen
¨
uber Parame-
ter
¨
anderungen der Regelstrecke. D. h., der Regelkreis besitzt im Gleitzustand
immer dieselbe Dynamik, auch wenn sich die Regelstrecke ver
¨
andert. Dieses
Verhalten kann daher f
¨
ur den Entwurf einer bestimmten Klasse von robusten
Regelungen, den Gleitzustandsregelungen, ausgenutzt werden. Wir widmen
uns dieser Thematik in Kapitel 5.2.
1.1.9 Chaos
Chaos tritt in biologischen, meteorologischen,
¨
okonomischen und technischen
Systemen auf [21, 95, 180]. Konkrete Beispiele sind Wirtschaftszyklen, Single-
Mode-Laser, mikromechanische Oszillatoren und die Entwicklung von Popu-
lationen in
¨
okologischen Systemen. Die wichtigste Charakteristik chaotischer
Systeme besteht darin, dass man nicht genau sagen kann, wie sich ihre Zu-
standsgr
¨
oßen entwickeln werden. Dies ist insofern erstaunlich, da chaotische
Systeme durch gew
¨
ohnliche Differenzialgleichungen mit deterministischem
Verhalten beschrieben werden k
¨
onnen. Der Begriff deterministisch schließt da-
bei jegliche Art von stochastischen Einfl
¨
ussen auf das System aus. Anschaulich
betrachtet bedeutet chaotisches Verhalten Folgendes:
(1) Die Trajektorien verlaufen aperiodisch, d. h., sie laufen nicht in Grenzzy-
klen hinein.
(2) Die Trajektorien streben weder in eine Ruhelage noch ins Unendliche.
(3) Beliebig nah beieinander liegende Anfangswerte bzw. -vektoren f
¨
uhren zu
sehr unterschiedlichen Trajektorienverl
¨
aufen.
Wir betrachten als Beispiel f
¨
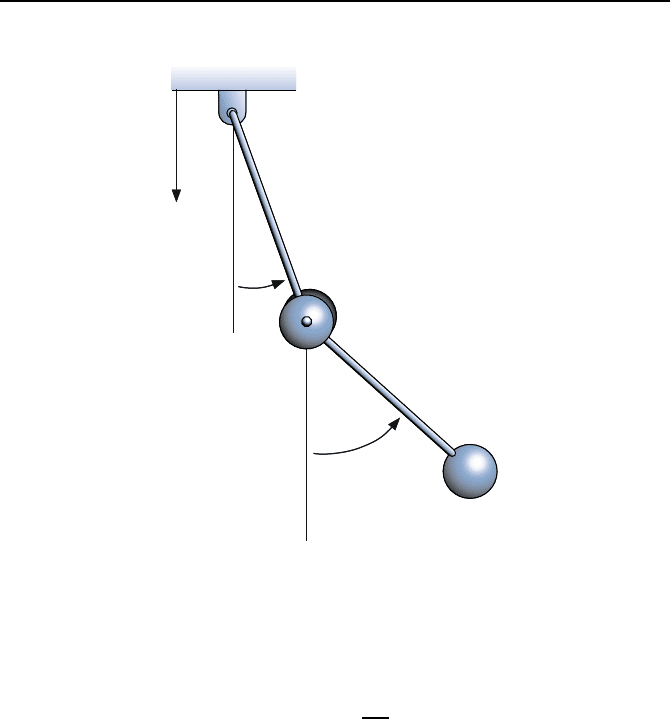
ur ein chaotisches System das Doppelpen-
del, wie es Bild 1.23 zeigt. Die Massen m
1
und m
2
h
¨
angen jeweils an zwei
Pendelst
¨
aben der L
¨
angen l
1
und l
2
. Die Gelenke erlauben eine freie Rotation
der Pendel, d. h., die Drehwinkel Θ
1
und Θ
2
sind nicht durch Anschl
¨
age be-
schr
¨
ankt. Auf die Pendelmassen wirkt die Erdbeschleunigung g =9.81 m s
−2
,
so dass das Doppelpendel f
¨
ur die Winkel Θ
1
= Θ
2
= 0 eine stabile Ruhelage
besitzt.
Beschrieben wird das System durch die Differenzialgleichungen
¨
Θ
1
=
g(sin Θ
2
cos ΔΘ − μ sin Θ
1
) − sin ΔΘ(l
2
˙
Θ
2
2
+ l
1
˙
Θ
2
1
cos ΔΘ)
l
1
(μ − cos
2
ΔΘ)
,
¨
Θ
2
=
μg(sin Θ
1
cos ΔΘ − sin Θ
2
)+sinΔΘ(μl
1
˙
Θ
2
1
+ l
2
˙
Θ
2
2
cos ΔΘ)
l
2
(μ − cos
2
ΔΘ)
20 Kapitel 1. Grundlagen nichtlinearer Systeme
Θ
1
Θ
2
l
1
l
2
g
m
1
m
2
Bild 1.23: Doppelpendel mit chaotischem Verhalten.
mit
ΔΘ = Θ
1
− Θ
2
,
μ =1+
m
1
m
2
.
Wir simulieren das System f
¨
ur die Parameterwerte m
1
= m
2
= 1 kg und
l
1
= l
2
= 1 m. Das chaotische Verhalten des Doppelpendels wird deutlich,
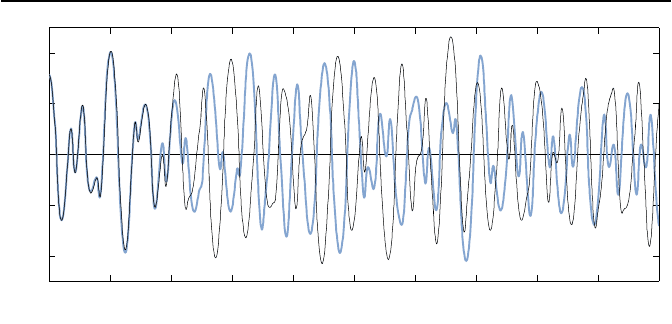
wenn man zwei nah beieinander liegende Anfangsvektoren
⎡
⎢
⎢
⎣
Θ
1
(0)
˙
Θ
1
(0)
Θ
2
(0)
˙
Θ
2
(0)
⎤
⎥
⎥
⎦
=
⎡
⎢
⎢
⎣
π/2
0
−π/2
0.01
⎤
⎥
⎥
⎦
und
⎡
⎢
⎢
⎢
⎣
˜
Θ
1
(0)
˙
˜
Θ
1
(0)
˜
Θ
2
(0)
˙
˜
Θ
2
(0)
⎤
⎥
⎥
⎥
⎦
=
⎡
⎢
⎢
⎣
π/2
0
−π/2
0.0101
⎤
⎥
⎥
⎦
betrachtet und die sich aus ihnen ergebenden Winkelverl
¨
aufe Θ
1
(t) und
˜
Θ
1
(t)
miteinander vergleicht. Wie aus Bild 1.24 erkennbar, verlaufen die Winkel
trotz nahezu identischer Anfangsbedingungen nach einiger Zeit v
¨
ollig unter-
schiedlich und regellos.
Technische Systeme weisen nur sehr selten chaotisches Verhalten auf. Denn
die Entwickler und die Nutzer technischer Systeme sind im Allgemeinen daran
1.1. Systembeschreibung und Systemverhalten 21
Θ
1
,
˜
Θ
1
in rad
Zeit t in s
2
1
0
-1
-2
0
5
10 15 20 25 30 35 40
45
50
Bild 1.24: Verl
¨
aufe der Winkel Θ
1
(schwarze Kurve) und
˜
Θ
1
(blaue Kurve) des
Doppelpendels mit chaotischem Verhalten.
interessiert, dass ihre Anlage, ihr Prozess oder ihr Fahrzeug ein vorhersagba-
res Verhalten besitzt. Im Kapitel 4.4 betrachten wir ein weiteres technisches
chaotisches System, ein Fluidsystem, und regeln es so, dass es eine global
asymptotisch stabile Ruhelage besitzt und folglich kein chaotisches Verhalten
mehr aufweist. Eine detaillierte Darstellung chaotischer Systeme findet sich
in [6, 7, 34, 174].
1.1.10 Nichtlineare Zustandstransformationen
In der linearen Systemtheorie hat es sich oftmals als sehr n
¨
utzlich erwiesen,
in bestimmten F
¨
allen die Beschreibung
˙x = Ax + Bu (1.8)
eines Systems in eine andere Darstellung zu transformieren. Dies geschieht
mittels einer Koordinatentransformation
x = Tz, (1.9)
wobei der Vektor z die neuen Koordinaten repr
¨
asentiert. Die Matrix T ist
eine regul
¨
are n × n - Matrix. Die neue Systemdarstellung ist dann
˙z = T
−1
AT z + T
−1
Bu. (1.10)
Oftmals w
¨
ahlt man die Transformationsmatrix T so, dass die neue System-
matrix T
−1
AT Diagonalgestalt oder die Gestalt einer Begleitmatrix
T
−1
AT =
⎡
⎢
⎢
⎢
⎣
010··· 0
001··· 0
.
.
.
.
.
.
.
.
.
.
.
.
−a
0
−a
1
−a
2
···−a
n−1
⎤
⎥
⎥
⎥
⎦

22 Kapitel 1. Grundlagen nichtlinearer Systeme
besitzt. Diese Darstellungen sind n
¨
utzlich f
¨
ur den Reglerentwurf oder um Sys-
temeigenschaften aus ihnen direkt ablesen zu k
¨
onnen.
Auch bei nichtlinearen Systemen
˙x = f(x, u) (1.11)
k
¨
onnen Transformationen
z = q(x)bzw.x = q
−1
(z) (1.12)
sinnvoll sein, wenn es mit ihnen gelingt, das System in eine z. B. f
¨
ur den
Reglerentwurf geeignete Form zu bringen. In der Regel fordert man, dass die
Transformationen (1.12) stetig differenzierbar und eineindeutig sind. Letzte-
res bedeutet, dass jedem x genau ein z und umgekehrt zugeordnet werden
kann. Eine solche Transformation bezeichnet man als Diffeomorphismus.Die
transformierte Beschreibung ergibt sich durch Einsetzen der Transformations-
gleichung (1.12) in die Systembeschreibung (1.11). Wir erhalten so
dq
−1
(z)
dt
= f(q
−1
(z), u),
woraus
∂q
−1
(z)
∂z
· ˙z = f(q
−1
(z), u)
und schließlich die transformierte Systemdarstellung
˙z =
∂q
−1
(z)
∂z
−1
f(q
−1
(z), u)=
ˆ
f(z, u) (1.13)
folgt. Auf
¨
ahnliche Weise erh
¨
alt man f
¨
ur die R
¨
ucktransformation von z-
Koordinaten in x-Koordinaten die Gleichung
˙x =
∂q(x)
∂x
−1
ˆ
f(q(x), u)=f(x, u). (1.14)
F
¨
ur die in Gl. (1.13) verwendete Inverse der Jacobi-Matrix von q
−1
gilt
aufgrund der Ableitungsregel f
¨
ur Umkehrfunktionen
∂q
−1
(z)
∂z
−1
=
∂q(x)
∂x
x=q
−1
(z)
.
In vielen F
¨
allen kann die Anwendung obiger Identit
¨
at die Berechnung des
transformierten Systems in Gl. (1.13) erleichtern.
An dieser Stelle wird nun die Forderung nach stetiger Differenzierbarkeit
von q und q
−1
plausibel. Ist sie erf
¨
ullt, so sind die Matrizen (∂q
−1
(z)/∂z)
−1
und ∂q(x)/∂x stetig. W
¨
are dies nicht der Fall, so w
¨
are es m
¨
oglich, dass die