J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.


84 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Es sei angemerkt, dass diese Definition auch f
¨
ur nichtlineare Systeme
˙x = f(x, u),
y = g(x, u)
gilt.
In obiger Stabilit
¨
atsdefinition geht x(t) nicht zwingend f
¨
ur t →∞gegen
null. Vielmehr verbleibt die Trajektorie x(t) in einem bestimmten Gebiet. Das
erinnert an die Stabilit
¨
at im Sinne von Ljapunov. Und in der Tat gilt
Satz 5 (Ruhelage eines hyperstabilen Systems). Ist ein lineares System
hyperstabil, so besitzt es eine einzige Ruhelage in
x = 0.
Diese Ruhelage ist stabil im Sinne von Ljapunov.
Man beachte, dass der Begriff der Hyperstabilit
¨
at als Systemeigenschaft
betrachtet wird und nicht als Eigenschaft einer Ruhelage. Das ist m
¨
oglich, da
nur eine Ruhelage existiert und ihre Stabilit
¨
at global ist. In der Praxis wird
man allerdings auch oft
x(t) → 0 f
¨
ur t →∞
fordern. Entsprechend definiert man die asymptotische Hyperstabilit
¨
at wie
folgt.
Definition 10 (Asymptotische Hyperstabilit
¨
at). Ein hyperstabiles Sys-
tem heißt asymptotisch hyperstabil, wenn f
¨
ur jede Eingangsfunktion u(t),die
die Ungleichung
t
0
u
T
(τ) · y(τ ) dτ ≤ ε
2
0
f
¨
ur alle t ≥ 0
erf
¨
ullt, f
¨
ur den Zustandsvektor x(t) mit einem beliebigen Anfangsvektor x(0) ∈
IR
n
lim
t→∞
x(t) → 0
gilt.
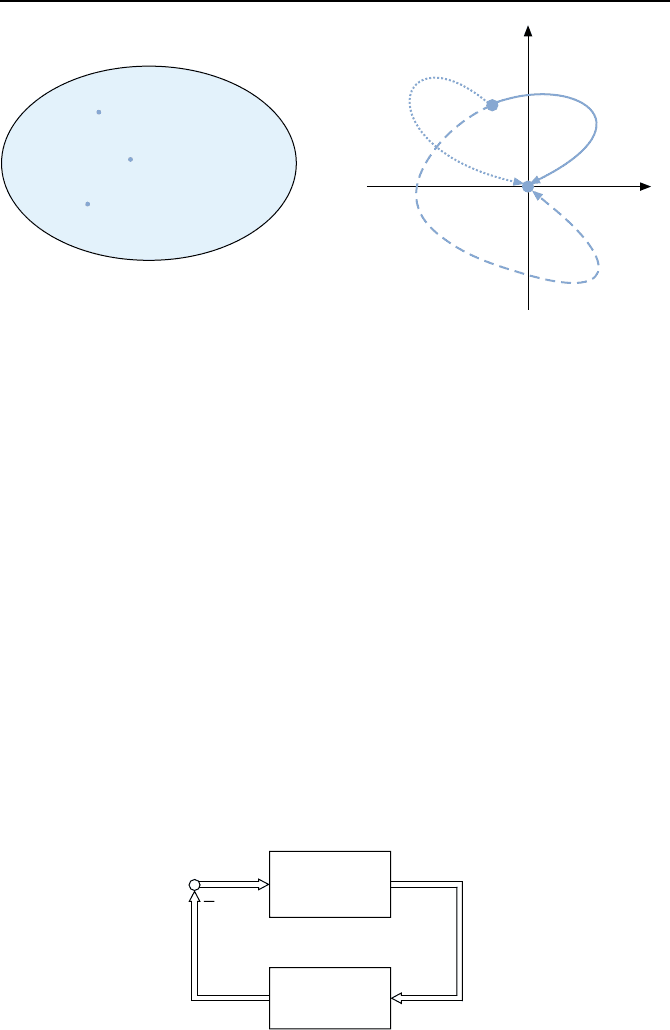
Bild 2.48 illustriert die Definition anhand dreier Funktionen u
1
, u
2
und
u
3
aus der Menge der Funktionen, die die Integralungleichung erf
¨
ullen. Die
zugeh
¨
origen Trajektorien x
1
(t), x
2
(t) und x
3
(t) streben asymptotisch in den
Ursprung. Bez
¨
uglich der Stabilit
¨
at der Ruhelage x
R
= 0 gilt im Fall asymp-
totischer Hyperstabilit
¨
at folgender Satz.
2.3. Hyperstabilit
¨
at 85
u
1
(t)
u
2
(t)
u
3
(t)
x(0)
x
1
x
2
x
1
(t)
x
2
(t)
x
3
(t)
Bild 2.48: Illustrationen zur Definition 10: Links ist die Menge der erlaubten Funk-
tionen u(t) gezeigt, rechts sind drei Trajektorien x
1
(t), x
2
(t) und x
3
(t) dargestellt,
die aus den Eingangsverl
¨
aufen u
1
(t), u
2
(t) und u
3
(t) resultieren.
Satz 6 (Globale Stabilit
¨
at). Ist ein lineares System asymptotisch hyper-
stabil, so besitzt es die global asymptotisch stabile Ruhelage x
R
= 0.
Es scheint zun
¨
achst wenig sinnvoll zu sein, obige Definitionen und S
¨
atze
f
¨
ur lineare Systeme anzugeben. F
¨
ur sie l
¨
asst sich Stabilit
¨
at nat
¨
urlich einfacher
feststellen. Betrachtet man aber Eingangsfunktionen
u(t)=−F {y(t),t},
die vom Ausgangsvektor y(t)abh
¨
angen, wobei F ein beliebiger Operator sein
kann, so erscheint die Situation in einem neuen Licht: Ein nichtlinearer Re-
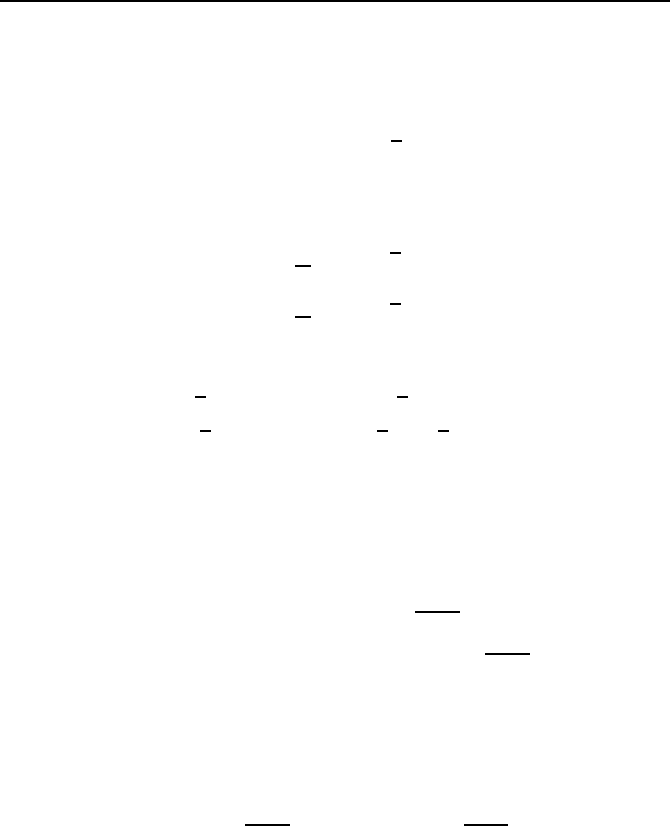
gelkreis wie in Bild 2.49 liegt vor.
Der Operator F kann z. B. eine nichtlineare zeitvariante Funktion
u(t)=−f(y,t)
oder eine Faltungsoperation
G(s)
F {y,t}
u
v
y
Bild 2.49: Nichtlinearer MIMO-Regelkreis mit linearer Regelstrecke und nichtlinea-
rer R
¨
uckf
¨
uhrung.
86 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
u(t)=−
t
0
g(t − τ)y(τ) dτ
sein. Die Einhaltung der Integralungleichung
t
0
u
T
(τ) · y(τ ) dτ ≤ ε
2
0
f
¨
ur alle t ≥ 0
kann dann direkt anhand der Nichtlinearit
¨
at
u(t)=−v(t)=−F {y,t}
des Regelkreises
¨
uberpr
¨
uft werden. Im Regelkreis des Bildes 2.49 ist also fest-
zustellen, ob
t
0
v
T
(τ) · y(τ) dτ ≥−ε
2
0
f
¨
ur alle t ≥ 0 (2.10)
gilt. Gl. (2.10) wird als Popov’sche Integralungleichung bezeichnet.
2.3.2 Hyperstabilit
¨
at nichtlinearer SISO-Regelkreise
Bez
¨
uglich der nichtlinearen R
¨
uckf
¨
uhrung betrachtet man als wichtiges Beispiel
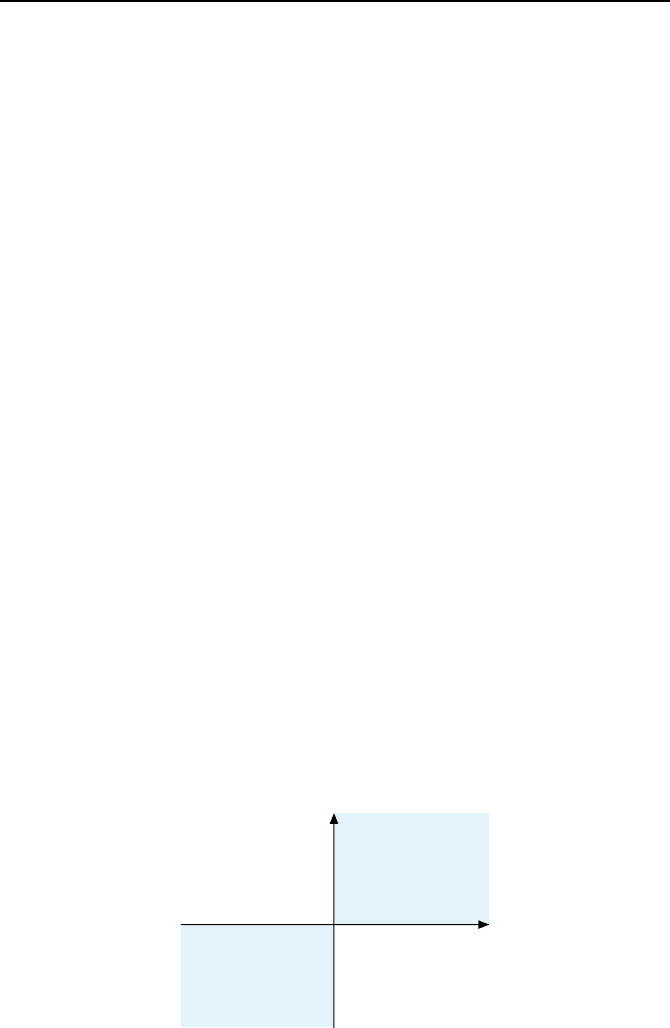
ein SISO-System und alle Kennlinien im Sektor [0, ∞), welcher in Bild 2.50
dargestellt ist. Offensichtlich gilt f
¨
ur alle Kennlinien in [0, ∞) die Ungleichung
v · y ≥ 0
bzw.
u · y ≤ 0.
−u, v
y
Bild 2.50: Kennliniensektor [0, ∞), in dem alle Kennlinien die Popov’sche Integral-
ungleichung erf
¨
ullen.
2.3. Hyperstabilit
¨
at 87
Im
Re
Pole
(a)
Im
Re
Ortskurve
ω = ∞
ω =0
(b)
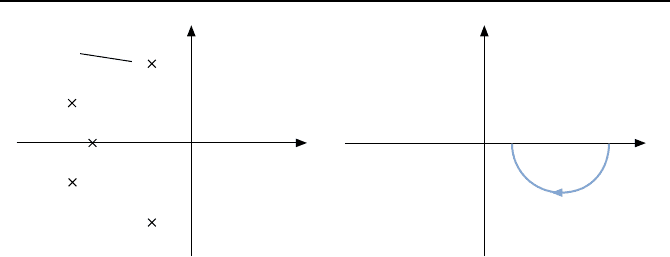
Bild 2.51: Die beiden Bedingungen f
¨
ur die asymptotische Hyperstabilit
¨
at linearer
SISO-Systeme: (a) f
¨
ur alle Eigenwerte gilt Re {λ
i
} < 0, (b) f
¨
ur die Frequenzen
ω ≥ 0 gilt Re {G(jω)} > 0.
Also ist die Popov’sche Integralungleichung
t
0
vy dτ ≥−ε
2
0
f
¨
ur alle t ≥ 0
erf
¨
ullt. An diesem Beispiel erkennt man auch die Verwandtschaft zum Begriff
der absoluten Stabilit
¨
at.
Der Nachweis, dass die nichtlineare R
¨
uckf
¨
uhrung die Popov’sche Integral-
ungleichung erf
¨
ullt, reicht allerdings noch nicht aus, um sicherzustellen, dass
der betrachtete nichtlineare Regelkreis stabil ist. Man hat n
¨
amlich noch zu
¨
uberpr
¨
ufen, ob die lineare Regelstrecke hyperstabil ist. Da man in der Praxis
meistens an einer asymptotischen Ruhelage x
R
= 0 interessiert ist, wird im
Weiteren nur der Fall der asymptotischen Hyperstabilit
¨
at betrachtet.
Es l
¨
asst sich nun zeigen, dass steuer- und beobachtbare, zeitinvariante
SISO-Systeme
G(s)=d + c
T
(sI − A)
−1
b
genau dann asymptotisch hyperstabil sind, wenn die
¨
Ubertragungsfunktion
G(s) stabil ist und Re {G(jω)} > 0f
¨
ur alle ω ≥ 0 gilt. Diese Bedingung
illustriert Bild 2.51. Eine
¨
Ubertragungsfunktion G(s), die beide Forderungen
erf
¨
ullt, nennt man streng positiv reell.
Es gilt f
¨
ur den Regelkreis des Bildes 2.49 im SISO-Fall folgender wichtiger
Stabilit
¨
atssatz.
Satz 7 (Hyperstabilit
¨
at von SISO-Regelkreisen). Gegeben sei der nicht-
lineare Regelkreis
Y (s)=G(s) · U (s),
u = −v,
v = F {y,t}
88 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
mit der steuer- und beobachtbaren, zeitinvarianten Regelstrecke G(s).Erf
¨
ullt
die lineare Regelstrecke die Bedingungen
(1) G(s) ist stabil und
(2) Re {G(jω)} > 0 f
¨
ur alle ω ≥ 0
und erf
¨
ullt die nichtlineare R
¨
uckf
¨
uhrung die Popov’sche Integralungleichung
(3)
t
0
v(τ)y(τ) dτ ≥−ε
2
0
f
¨
ur alle t ≥ 0,
dann und nur dann ist der Regelkreis asymptotisch hyperstabil.
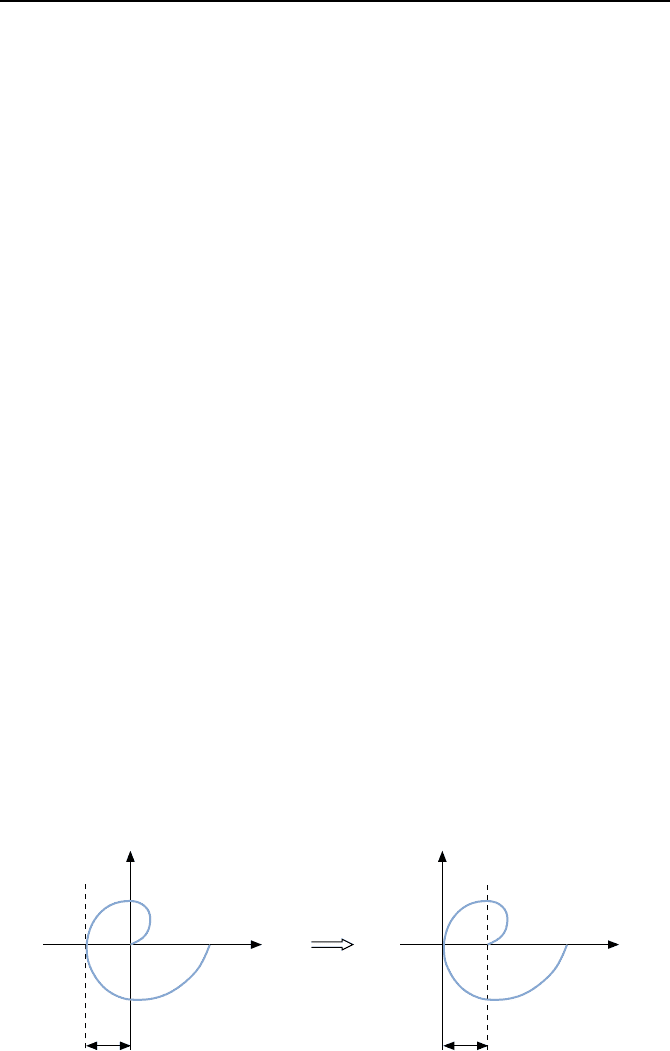
In den meisten praktischen F
¨
allen wird die Bedingung (2) des obigen Satzes
nicht erf
¨
ullt sein. Man kann aber auch diesen Fall behandeln, indem man die
Ortskurve soweit nach rechts verschiebt, bis G(s) vollst
¨
andig in der rechten
Halbebene liegt. Bild 2.52 illustriert dies. Dies ist m
¨
oglich, indem man
˜
d als
k
¨
unstlichen Durchgriff zur Streckenbeschreibung gem
¨
aß
˜
G(s)=
˜
d + G(s)
addiert. Damit dabei der Regelkreis in seinem Verhalten unver
¨
andert bleibt,
muss man den k
¨
unstlichen Durchgriff der Strecke durch eine R
¨
uckkopplung
bei der Nichtlinearit
¨
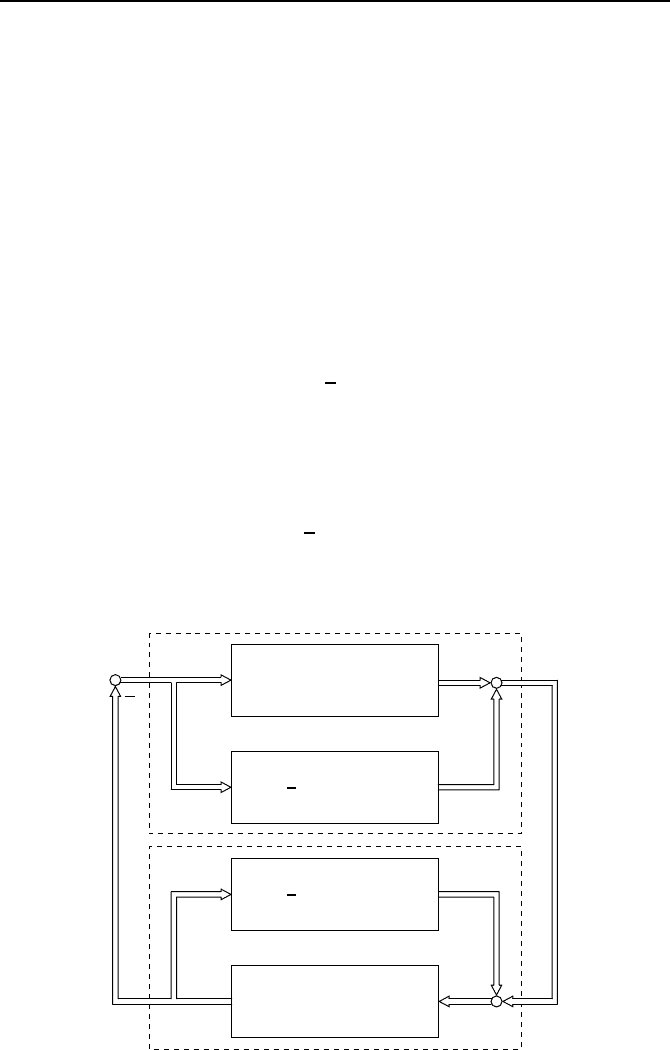
at wieder aufheben. Bild 2.53 zeigt im Teilbild (a) den
entsprechenden Regelkreis und die neue Nichtlinearit
¨
at im Teilbild (b), die
durch den k
¨
unstlichen Durchgriff entstanden ist.
Man hat nun die nichtlineare R
¨
uckf
¨
uhrung
v = F {ˆy + v
˜
d, t} (2.11)
zu untersuchen. Es entsteht also eine neue Nichtlinearit
¨
at, die in die Po-
pov’sche Integralungleichung einzusetzen ist. Leider ist die nichtlineare Funk-
tion (2.11) implizit in v.F
¨
ur die Auswertung der Popov’schen Integralglei-
chung ben
¨
otigen wir den Zusammenhang zwischen v und ˜y aber im Allgemei-
nen in expliziter Form. Leider l
¨
asst sich Gl. (2.11) nicht in jedem Fall in eine
explizite Form bringen. Die Auswertung der Popov’schen Integralgleichung
kompliziert sich dann.
ImIm
ReRe
˜
d
˜
d
Bild 2.52: Verschiebung der Ortskurve G(jω)um
˜
d.
2.3. Hyperstabilit
¨
at 89
G(s)
˜
d
˜
d
F {˜y, t}
u
ˆy
y
˜y
v
(a)
v
ˆy
˜y
˜
F {ˆy, t}
˜
d
F {˜y, t}
(b)
Bild 2.53: (a) Regelkreis mit k
¨
unstlichem Durchgriff
˜
d. (b) Nichtlinearit
¨
at
˜
F {ˆy, t} =
F {ˆy + v
˜
d, t}.
2.3.3 Hyperstabilit
¨
at nichtlinearer MIMO-Systeme
Auch f
¨
ur MIMO-Systeme gibt es ein Stabilit
¨
atskriterium im Frequenzbereich
[138, 154]. Es ist aber nicht ganz einfach anzuwenden. Deshalb betrachten
wir im Weiteren ein leichter handhabbares Kriterium auf Basis der Zustands-
raumdarstellung.
Es l
¨
asst sich zeigen, dass steuer- und beobachtbare, zeitinvariante MIMO-
Systeme
˙x = Ax + Bu,
y = Cx + Du
mit der R
¨
uckf
¨
uhrung
u = −F {y,t},
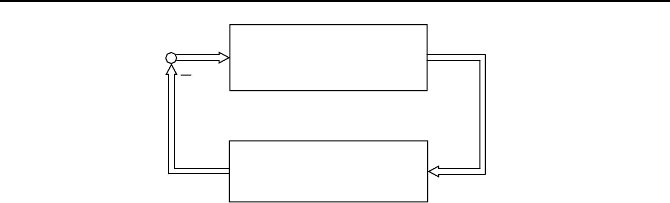
dargestellt in Bild 2.54, genau dann asymptotisch hyperstabil sind, wenn fol-
gender Satz erf
¨
ullt ist.
Satz 8 (Hyperstabilit
¨
at von MIMO-Regelkreisen). Gegeben sei ein
nichtlinearer Regelkreis mit der steuer- und beobachtbaren Regelstrecke
˙x = Ax + Bu,
y = Cx + Du
und der R
¨
uckf
¨
uhrung
u = −v = −F {y,t} .
Erf
¨
ullt
90 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
u
v
y
˙x = Ax+ Bu
y = Cx+ Du
v = F {y,t}
Bild 2.54: Nichtlinearer MIMO-Regelkreis.
(1) die Regelstrecke die Kalman-Jakubovich-Gleichungen
A
T
R + RA = −LL
T
,
LV = C
T
− RB,
D
T
+ D = V
T
V
mit positiv definitem R, beliebig regul
¨
arem L und beliebigem V und
(2) die R
¨
uckf
¨
uhrungsnichtlinearit
¨
at F die Popov’sche Integralgleichung
t
0
v
T
(τ)y(τ) dτ ≥−ε
2
0
f
¨
ur alle t ≥ 0,
dann und nur dann ist der Regelkreis asymptotisch hyperstabil.
Die Popov’sche Integralungleichung
¨
uberpr
¨
uft man im MIMO-Fall
¨
ahnlich
wie im SISO-Fall. Aber wie l
¨
ost man die Kalman-Jakubovich-Gleichungen?
Wir betrachten im Folgenden verschiedene L
¨
osungsans
¨
atze.
F
¨
ur ein System ohne Durchgriff, d. h. D = 0, vereinfachen sich die Kalman-
Jakubovich-Gleichungen zu
A
T
R + RA = −LL
T
,
C
T
= RB.
Bei Systemen mit Durchgriff D = 0 ist die Situation komplizierter. Oft
kann man dann in den folgenden drei Schritten vorgehen:
Schritt 1: Man w
¨
ahlt eine beliebige regul
¨
are Matrix L,z.B.
L = I
und bestimmt aus dem linearen Gleichungssystem
A
T
R + RA = −LL
T
2.3. Hyperstabilit
¨
at 91
die positiv definite Matrix R.
Schritt 2: Da L regul
¨
ar ist, bestimmt man aus
LV = C
T
− RB
die Matrix
V = L
−1
(C
T
− RB).
Schritt 3: Und schließlich setzt man D = D
T
voraus und erh
¨
alt aus
D + D
T
= V
T
V
die Matrix
D =
1
2
V
T
V . (2.12)
Es f
¨
allt nun sofort auf, dass die Matrix (2.12) im Allgemeinen nicht mit der
Durchgangsmatrix D der Systembeschreibung
¨
ubereinstimmt. Man verwendet
daher folgenden Trick. Man bildet die k
¨
unstliche Durchgriffmatrix
˜
D =
1
2
V
T
V −D.
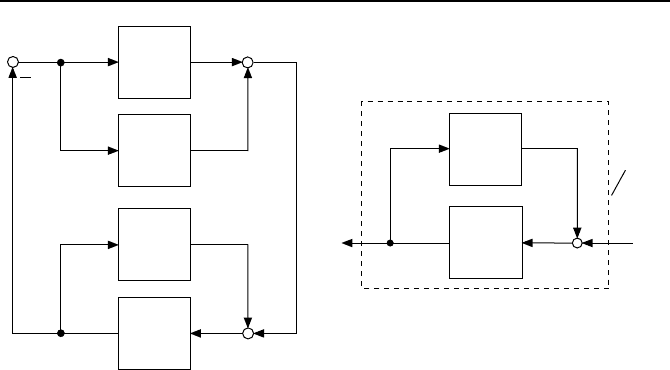
Dann formt man den Regelkreis aus Bild 2.54, wie in Bild 2.55 dargestellt, um.
u
ˆy
y
y
v
˙x = Ax + Bu
y = Cx + Du
1
2
V
T
V − D
1
2
V
T
V − D
F {y,t}
Bild 2.55: Regelkreis mit zus
¨
atzlichem k
¨
unstlichen Durchgriff.

92 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Ersichtlich heben sich die zus
¨
atzlichen Zweige mit
1
2
V
T
V −D gegenseitig auf.
Die Regelstrecke hat dann, wie in Gl. (2.12) gefordert, die Durchgangsmatrix
1
2
V
T
V .
Bez
¨
uglich der Popov’schen Integralungleichung ist jetzt die Nichtlinearit
¨
at
v = F {ˆy +
˜
Dv,t}
zu betrachten. Auch hier tritt,
¨
ahnlich wie im SISO-Fall, eine implizite Glei-
chung f
¨
ur v auf. Dies kann bei der Auswertung der Popov’schen Integralun-
gleichung zu Schwierigkeiten f
¨
uhren.
Manchmal k
¨
onnen die Kalman-Jakubovich-Gleichungen auch auf andere
Weise als durch obige drei Schritte gel
¨
ost werden. So kann auch zuerst die
Matrix V mittels einer Cholesky-Zerlegung aus
V
T
V = D
T
+ D
ermittelt werden. Die verbleibenden zwei Kalman-Jakubovich-Gleichungen
A
T
R + RA = −LL
T
und LV = C
T
− RB
bilden dann ein nichtlineares Gleichungssystem in R und L.Diesesl
¨
ost man
und
¨
uberpr
¨
uft, ob eine L
¨
osung mit positiv definitem R und regul
¨
arem L
existiert.
2.3.4 Illustrationsbeispiele
Wir betrachten als ein einfaches Beispiel [86] das System
˙x =
−10
0 −3
x +
10
01
u,
y =
10
01
x +
10
01
u.
(2.13)
Von den Kalman-Jakubovich-Gleichungen l
¨
osen wir zuerst die Gleichung
V
T
V = D + D
T
. Es gilt in diesem Fall mit D = I die Gleichung
V =
√
2I.
Aus den beiden verbleibenden Kalman-Jakubovich-Gleichungen
A
T
R + RA = −LL
T
und RB = C
T
− LV
folgt hier, wenn wir der Einfachheit halber R und L als Diagonalmatrizen
ansetzen,
2.3. Hyperstabilit
¨
at 93
−2
r
1
0
03r
2
= −
l
2
1
0
0 l
2
2
(2.14)
und
r
1
0
0 r
2
=
10
01
−
√
2
l
1
0
0 l
2
. (2.15)
Die Gleichungen (2.14) und (2.15) bilden das nichtlineare Gleichungssystem
r
1
=
l
2
1
2
=1−
√
2l
1
,
r
2
=
l
2
2
6
=1−
√
2l
2
.
Es besitzt die L
¨
osungen
r
1
=3∓ 2
√
2 > 0,r
2
=7∓ 4
√
3 > 0,
l
1
= ±2 −
√
2 =0,l
2
= ±2
√
6 − 3
√
2 =0,
so dass die Matrix R positiv definit und die Matrix L regul
¨
ar ist. Die Kalman-
Jakubovich-Gleichungen sind also erf
¨
ullt.
Aus der Zustandsraumdarstellung (2.13) und auch aus der zugeh
¨
origen
¨
Ubertragungsmatrix
G(s)=C(sI − A)
−1
B + D =
⎡
⎢
⎣
s +2
s +1
0
0
s +4
s +3
⎤
⎥
⎦
ist ersichtlich, dass die beiden Differenzialgleichungen bzw. Teilsysteme nicht
verkoppelt sind. Wir k
¨
onnen in diesem Fall auch beide Teilsysteme mittels
Satz 7 getrennt voneinander daraufhin untersuchen, ob sie positiv reell sind.
Da die Ortskurven von
G
11
(s)=
s +2
s +1
und G
22
(s)=
s +4
s +3
in Bild 2.56 rechts der imagin
¨
aren Achse liegen und beide Teilsysteme stabil
sind, ist das Gesamtsystem, wie erwartet, streng positiv reell.
Als Regler verwenden wir zwei P-Regler, die einer Stellgr
¨
oßenbeschr
¨
ankung
unterliegen. Das Regelgesetz hat dann die Form
u = −v =
−sat(K
R1
y
1
)
−sat(K
R2
y
2
)
mit sat(x)=
⎧
⎪
⎨
⎪
⎩
−x
max
,x<−x
max
,
x, |x|≤x
max
,
x
max
,x>x
max
,
(2.16)
wobei K
R1
> 0 und K
R2
> 0 die Parameter der P-Regler sind.