J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.


3
Nichtlineare Regelungen f
¨
ur lineare
Regelstrecken
3.1 Regler mit Antiwindup
3.1.1 Der Windup-Effekt
Jedes reale Stellglied eines Regelkreises besitzt eine Beschr
¨
ankung der Stell-
gr
¨
oße u, da seine maximale Stellleistung endlich ist. Bild 3.1 illustriert einen
entsprechenden Regelkreis mit Regelstrecke G(s), Regler K(s) und Begren-
zungsglied, wobei die beiden Letzten das Stellglied enthalten. Die Begrenzung
der Stellgr
¨
oße beschreibt man durch eine S
¨
attigungskennlinie
u =sat(u
c
)=
⎧
⎪
⎨
⎪
⎩
u
max
,u
c
>u
max
,
u
c
,u
min
≤ u
c
≤ u
max
,
u
min
,u
c
<u
min
.
Beispiele f
¨
ur solche Begrenzungen der Stellgr
¨
oße sind das maximale Dreh-
moment eines Stellmotors, der maximale Ruderwinkel eines Schiffes und der
maximale
¨
Offnungsgrad eines Ventils. Dabei hat die S
¨
attigungskennlinie oft
symmetrische Grenzen, d. h., es gilt oft
u
min
= −u
max
.
w
e
u
u
c
y
u
min
u
max
K(s)
G(s)
Bild 3.1: Regelkreis mit linearer Regelstrecke, linearem Regler K(s) und einer Be-
grenzung der Stellgr
¨
oße.
116 Kapitel 3. Regelungen f
¨
ur lineare Regelstrecken
¨
Uberschreitet die Stellgr
¨
oße die Beschr
¨
ankungen, so ist der Regelkreis nicht
mehr linear, was im Allgemeinen nachteilig f
¨
ur seine Stabilit
¨
at und sein Re-
gelverhalten ist. Wir wollen dies im Weiteren untersuchen.
Zu diesem Zweck betrachten wir die allgemeine Struktur eines PID-
Reglers, d. h.
K(s)=K
R
1+
1
T
N
s
+ T
V
s
= K
PD
(s)+
K
I
s
mit K
I
= K
R
/T
N
. Der Regleranteil K
PD
(s) kann je nach Typ des Gesamtreg-
lers ein P-, PD- oder D-Regler sein oder im Falle eines reinen I-Reglers auch
entfallen. F
¨
ur den Fall u = u
c
,d.h.denunges
¨
attigten Fall, ist der Regelkreis
offensichtlich linear. Im ges
¨
attigten Fall dagegen gilt
u = u
max
oder u = u
min
,
d. h., auf die Regelstrecke G(s) wirkt eine konstante Stellgr
¨
oße u.
Eine Regelung kann im Fall der S
¨
attigung aufgrund der konstanten Stell-
gr
¨
oße u nicht stattfinden. Der Regelkreis ist dann praktisch unterbrochen. Bild
3.2 illustriert dies. Offensichtlich f
¨
uhrt die Unterbrechung dazu, dass der In-
tegrierer die Regelabweichung solange aufintegriert, bis die Regelabweichung
ihr Vorzeichen wechselt. Diesen Vorgang nennt man Windup
[1]
. Die Aufinte-
gration ist nicht nur unn
¨
utz, da ein Wert von
u
c
<u
min
bzw. u
c
>u
max
nicht auf die Regelstrecke wirken kann, sondern auch sch
¨
adlich, da der hohe
Integralanteil nach einem Vorzeichenwechsel der Regelabweichung e wieder
abgebaut werden muss, bis u
c
innerhalb der S
¨
attigungsgrenzen liegt. Erst
dann ist der Regelkreis wieder geschlossen und eine Regelung m
¨
oglich. Auch
nach dem Vorzeichenwechsel von e bleibt der Regelkreis also noch eine Zeit
w
e
u = u
max
u
c
≥ u
max
y
u
max
u
min
K
I
s
G(s)
K
PD
(s)
Unterbrechung
Bild 3.2: Regelkreis im S
¨
attigungsfall.
[1]
engl.: wind up = aufwickeln, aufspulen, hochkurbeln.
3.1. Regler mit Antiwindup 117
lang unterbrochen. Dies ist f
¨
ur das Regelverhalten ung
¨
unstig und kann zu
erh
¨
ohtem
¨
Uberschwingen oder sogar zur Instabilit
¨
at f
¨
uhren.
Die Situation l
¨
asst sich auch wie folgt interpretieren: Ist die Stellgr
¨
oße in
S
¨
attigung, der Regelkreis also unterbrochen, so bildet der Integralanteil des
Reglers ein instabiles Element im offenen Kreis. Diese Situation ist nat
¨
urlich
nicht erw
¨
unscht.
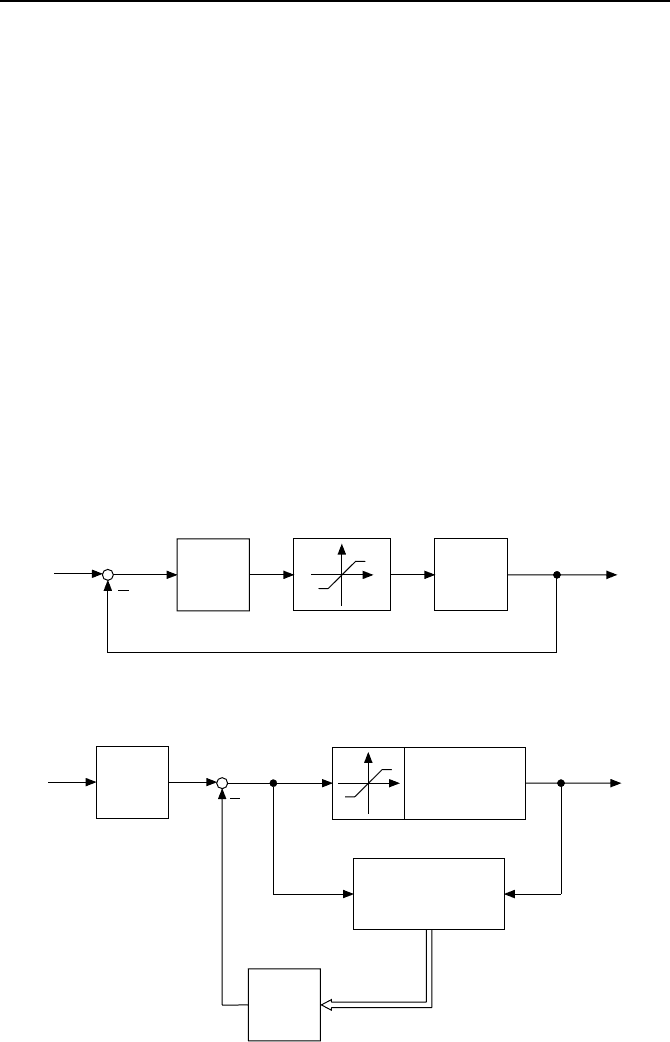
3.1.2 PID-Regler mit Antiwindup
Die Vermeidung des oben beschriebenen Windups ist mittels einer Antiwind-
up-Struktur m
¨
oglich. Diese verhindert, dass die Ausgangsgr
¨
oße u
c
des Reglers
die Grenzen u
min
und u
max
¨
uberschreitet. Bild 3.3 zeigt einen PID-Regler mit
Antiwindup. Die Kennlinie des Antiwindup-Elements ist eine Totzone
v =
⎧
⎪
⎨
⎪
⎩
m(u
c
− u
max
),u
c
>u
max
,
0,u
min
≤ u
c
≤ u
max
,
m(u
c
− u
min
),u
c
<u
min
.
Dabei gilt f
¨
ur die Steigung der Totzone m 0. Die Totzone realisiert eine
negative R
¨
uckkopplung des Reglerausganges auf den Eingang des I-Anteils.
Liegt der Ausgangswert u
c
des Reglers innerhalb der Stellgr
¨
oßenbeschr
¨
ankung
u
min
und u
max
,soistdieR
¨
uckkopplung nicht aktiv. D. h., der Regler arbeitet
als normaler PID-Regler.
¨
Uberschreitet u
c
eine der Begrenzungen u
min
oder
u
max
, so wirkt die Totzone als starke Gegenkopplung auf den I-Anteil. Da-
bei f
¨
uhrt die Gegenkopplung den I-Anteil sofort auf einen so niedrigen Wert
zur
¨
uck, dass u
c
die Stellgr
¨
oßenbeschr
¨
ankung nicht verletzt. Da die Steigung
m endlich ist, k
¨
onnen die Grenzen u
min
und u
max
durch die Stellgr
¨
oße u
c
geringf
¨
ugig
¨
uberschritten werden. In der Praxis spielt das aber keine Rolle.
v
e
u
m
u
c
u
max
u
max
u
min
u
min
K
I
s
K
PD
(s)
Antiwindup-Element
Bild 3.3: PID-Regler mit Antiwindup.
118 Kapitel 3. Regelungen f
¨
ur lineare Regelstrecken
v
e
u
m
u
c
u
max
u
min
K
I
s
K
PD
(s)
Antiwindup-Element
Bild 3.4: Alternative Struktur des Antiwindups aus Bild 3.3.
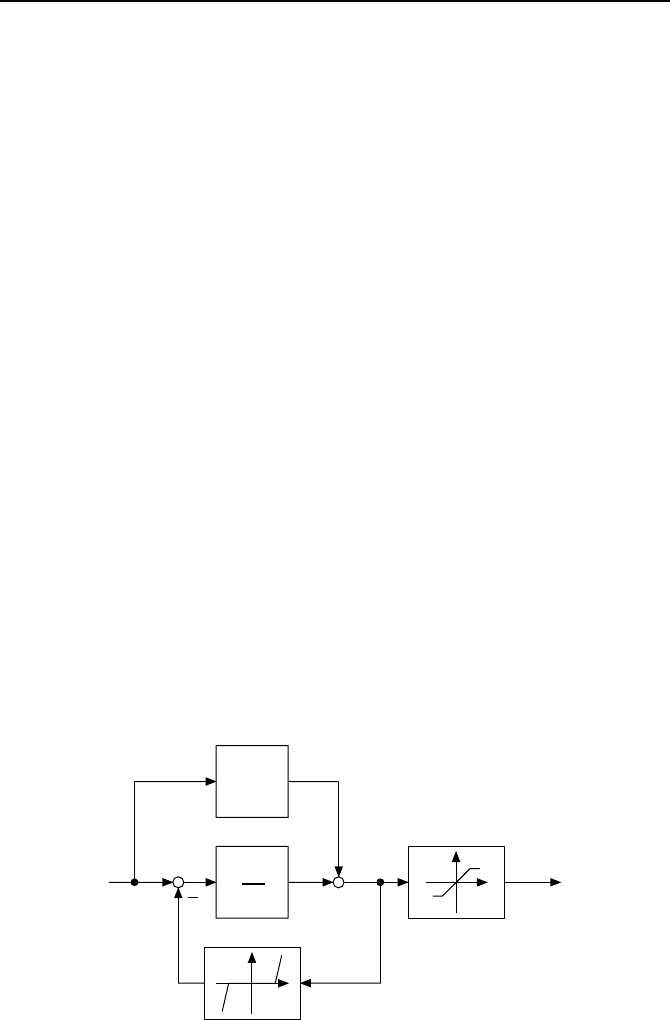
Eine Realisierung, die
¨
aquivalent zur Antiwindup-Struktur des Bildes 3.3
ist, aber ohne Totzone auskommt, ist in Bild 3.4 dargestellt. Diese Realisie-
rung des Antiwindups hat den Vorteil, dass nur eine nichtlineare Kennlinie
erforderlich ist.
Neben obiger klassischer Antiwindup-Methode f
¨
ur PID-Regler existiert ei-
ne Reihe weiterer Verfahren und dazugeh
¨
origer Erweiterungen. Ein
¨
Uberblick
hierzu findet sich in [198].
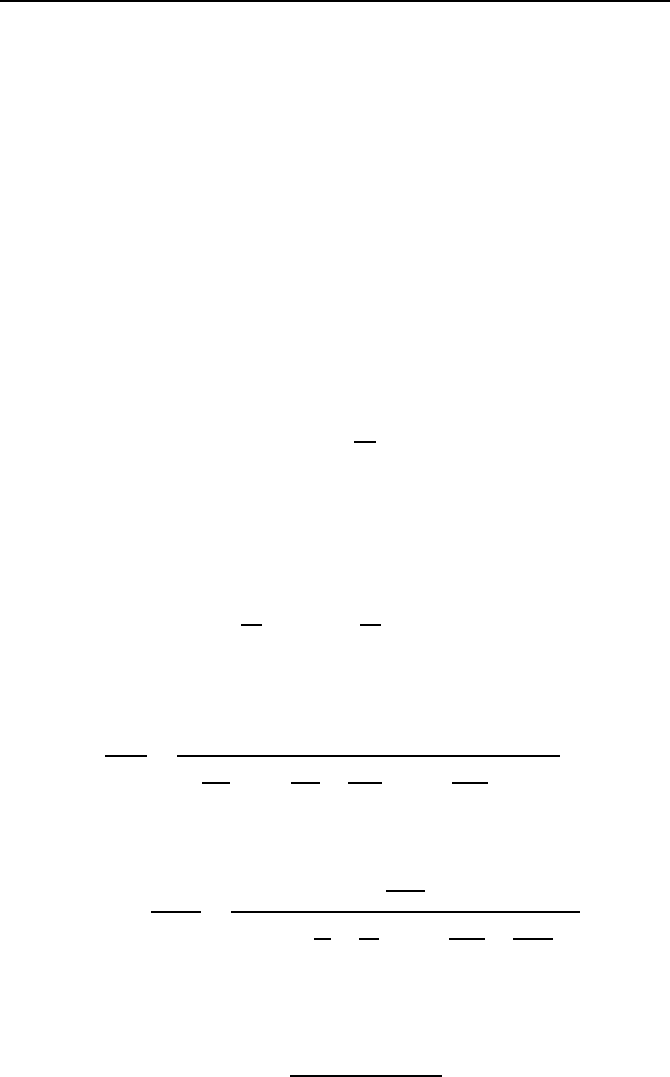
3.1.3 Beispiel Gleichstrommotor
Wir betrachten als Beispiel den Gleichstrommotor aus Bild 3.5, der als Servo-
antrieb arbeitet und zum Einstellen eines vorgebbaren Drehwinkels ϕ
L
dient.
In solchen Servoantrieben werden oft Antiwindup-Systeme in der Regelung
verwendet.
F
¨
ur die Ankerspannung u gilt mit der im Motor induzierten Spannung k
1
ω
und dem Ankerstrom i die Gleichung
i
u
RL
k
1
ω
M
ω,ϕ
ϕ
L
Last
Getriebe
¨u
Bild 3.5: Gleichstrommotor mit Getriebe und Last.
3.1. Regler mit Antiwindup 119
u = Ri + L
˙
i + k
1
ω. (3.1)
Dabei ist R der Widerstand, L die Induktivit
¨
at, ϕ der Drehwinkel und ω =˙ϕ
die Winkelgeschwindigkeit des Ankers. Das erzeugte Drehmoment ist
M = k
2
i
und dieses ist gleich
M = J ˙ω + k
3
ω
mit dem geschwindigkeitsproportionalen Reibungsterm k
3
ω. Hieraus folgt
k
2
i = J ˙ω + k
3
ω. (3.2)
Dabei gilt mit dem Tr
¨
agheitsmoment J
A
des Ankers und dem Tr
¨
agheitsmo-
ment J
L
der Last, das
¨
uber das Getriebe mit der
¨
Ubersetzung ¨u auf die An-
kerwelle r
¨
uckgerechnet wird, f
¨
ur das Gesamttr
¨
agheitsmoment
J = J
A
+
1
¨u
2
J
L
.
Die Werte k
1
,k
2
und k
3
sind Motorparameter.
Aus den Gl. (3.1) und (3.2) erh
¨
alt man mit den Laplace-Transformierten
U(s), I(s), Φ(s)vonu, i, ϕ
U(s)=RI(s)+LI(s) · s + k
1
Φ(s) · s,
I(s)=
J
k
2
Φ(s) · s
2
+
k
3
k
2
Φ(s) · s,
wenn alle Anfangswerte identisch null sind. Setzt man obige Gleichungen in-
einander ein, so ergibt sich die
¨
Ubertragungsfunktion
Φ(s)
U(s)
=
1
s
LJ
k
2
s
2
+
RJ
k
2
+
Lk
3
k
2
s +
Rk
3
k
2
+ k
1
.
Ber
¨
ucksichtigt man noch ϕ =¨uϕ
L
, so gilt
G(s)=
Φ
L
(s)
U(s)
=
k
2
¨uLJ
s
s
2
+
R
L
+
k
3
J
s +
Rk
3
LJ
+
k
1
k
2
LJ
.
Mit den Motor- und Lastdaten R =8.9Ω,L=0.1H,J=0.1Nms
2
rad
−1
,
¨u =10,k
1
=1.7775 V s rad
−1
,k
2
=4NmA
−1
und k
3
=0.1Nmsrad
−1
ergibt sich
G(s)=
40
s(s
2
+90s + 800)
.
120 Kapitel 3. Regelungen f
¨
ur lineare Regelstrecken
Die Motorspannung u, d. h. die Stellgr
¨
oße, unterliegt den Begrenzungen
−100 ≤ u ≤ 100.
Als Regler verwenden wir einen PI-Regler mit
H(s)=K
P
+ K
I
·
1
s
und den Parametern K
P
= 90 und K
I
= 150.
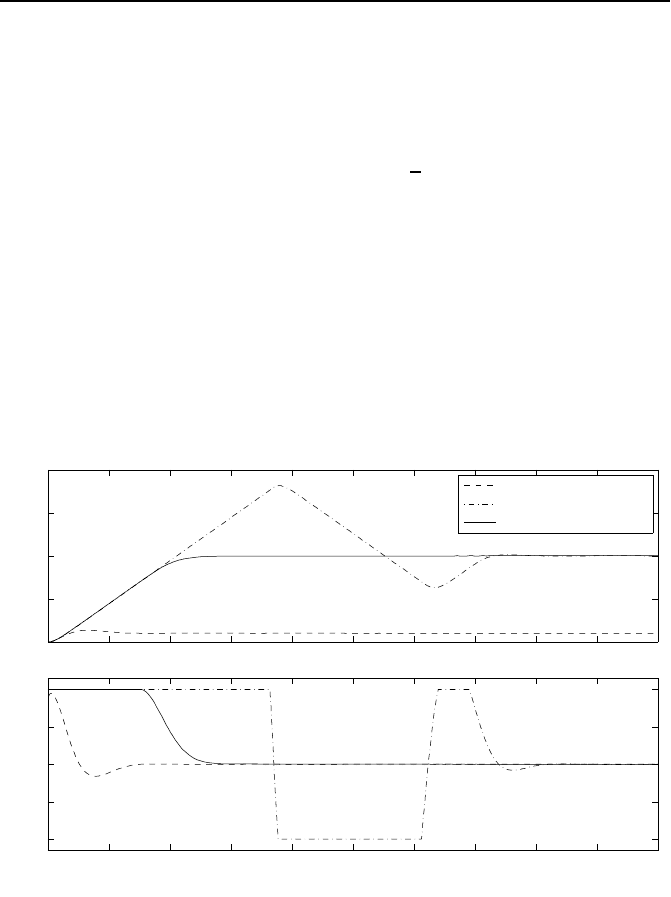
Die Simulationen in Bild 3.6 zeigen eine kleine Sprungantwort von ϕ
L
=
0 rad auf ϕ
L
=1rad=57.3
◦
mit linearer Ausregelung und eine große von
ϕ
L
=0radaufϕ
L
= 10 rad = 573.0
◦
mit nichtlinearer Ausregelung. F
¨
ur den
letztgenannten Fall eines PI-Reglers ohne Antiwindup, bei dem die Stellgr
¨
oße
in die S
¨
attigung geht, sind die negativen Auswirkungen des Windups des I-
Reglers klar ersichtlich. Deutlich erkennbar ist auch die positive Wirkung des
Antiwindups, das die durch das unn
¨
otige Hochlaufen des Integrierers verur-
sachten Schwingungen beseitigt.
Zeit t in s
ϕ
L
in rad
u in V
linear
ohne Antiwindup
mit Antiwindup
0
0
5
10
15
20
50
100
-50
-100
0
0
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
Bild 3.6: Winkelverlauf ϕ
L
und Motorspannung u f
¨
ur den linearen Fall, den Fall mit
Antiwindup und den Fall ohne Antiwindup, bei dem der Regler in S
¨
attigung ist.
3.1.4 Antiwindup f
¨
ur allgemeine Reglerstrukturen
Es stellt sich die Frage, was im Fall eines allgemeineren Reglers
3.1. Regler mit Antiwindup 121
U
c
(s)=H(s) · E(s)
als dem PID-Regler an Antiwindup-Maßnahmen vorzusehen ist. Besitzt eine
Regler
¨
ubertragungsfunktion H(s) instabile Pole oder Pole mit einem Realteil
gleich null, so tritt im Falle der Stellgr
¨
oßenbegrenzung ebenfalls ein Weglaufen,
d. h. Windup, der Reglerzust
¨
ande und damit der Reglerausgangsgr
¨
oße u
c
auf.
Bild 3.7 zeigt die Struktur dieses allgemeineren Regelkreises. Auch f
¨
ur diese
Regelkreise gibt es verschiedene Antiwindup-Methoden [41, 89, 99, 187].
Eine besonders plausible Antiwindup-Struktur f
¨
ur den allgemeinen Fall
erh
¨
alt man, wenn man einen kleinen Umweg macht, den wir auf den n
¨
achsten
Seiten verfolgen wollen. Er besteht darin, Zustandsregler mit Beobachtern zu
betrachten und f
¨
ur diese das Problem des S
¨
attigungsfalles zu l
¨
osen [71].
Wir betrachten den in Bild 3.8 dargestellten Zustandsregelkreis mit Be-
obachter, der auch Kontrollbeobachter genannt wird. Dabei ist die Stell-
gr
¨
oßenbeschr
¨
ankung Teil der Regelstrecke und das Vorfilter V dient der Kom-
pensation der bleibenden Regelabweichung.
Der gesch
¨
atzte Zustandsvektor ˜x entspricht nach einer gewissen Ein-
schwingzeit dem Zustandsvektor x der Regelstrecke, wenn u
min
≤ u
c
≤ u
max
gilt, d. h., wenn der lineare Fall vorliegt. Man beachte, dass bei Nichterf
¨
ullung
dieser Bedingung f
¨
ur u
c
der Regelkreis, wie oben beschrieben, nichtlinear ist.
w
e
u
u
c
y
u
max
u
min
H(s)
G(s)
Bild 3.7: Regelkreis mit S
¨
attigungskennlinie und beliebigem linearen Regler H(s).
w
u
c
y
˜x
k
T
V
˙
˜x = A˜x + bu
c
+ l
`
y − c
T
˜x
´
˙x = Ax + bu
y = c
T
x
Regelstrecke
Beobachter
Bild 3.8: Zustandsregelkreis mit Kontrollbeobachter.
122 Kapitel 3. Regelungen f
¨
ur lineare Regelstrecken
Dabei besitzt obiger Zustandsregelkreis mit Beobachter im linearen Fall
2n Eigenwerte. Dies sind – wie aus der Theorie linearer Beobachter und dem
Separationstheorem bekannt [124] – sowohl die n Eigenwerte der mit u =
−k
T
x geregelten Strecke, d. h. die Eigenwerte der Matrix
ˆ
A = A − bk
T
,
als auch die n Eigenwerte der Beobachtermatrix
F = A − lc
T
.
Das charakteristische Polynom des Kontrollbeobachters ist also durch
P (s)=det
sI − A + bk
T
D(s)
det
sI − A + lc
T
Δ(s)
gegeben, d. h., es setzt sich aus dem charakteristischen Polynom D(s)des
Regelkreises und dem charakteristischen Polynom Δ(s) des Beobachters zu-
sammen. Dabei sind die Eigenwerte des Regelkreises und die des Beobachters
aufgrund des Separationstheorems durch den Reglervektor k und den Beob-
achtervektor l unabh
¨
angig voneinander vorgebbar.
Verletzt die Stellgr
¨
oße die Beschr
¨
ankung, so sind u
c
und u verschieden. In
diesem Fall sind auch die Eingangsgr
¨
oßen von Regelstrecke und Beobachter
verschieden, wie aus Bild 3.8 erkennbar ist. Beobachtungsfehler sind die Fol-
ge und die Ausregelqualit
¨
at wird schlecht. Dieses Problem l
¨
asst sich einfach
l
¨
osen, indem man die Eingangsgr
¨
oße u
c
des Beobachters ebenfalls durch die
Stellgr
¨
oßenbegrenzung einschr
¨
ankt. Dann haben Regelstrecke und Beobachter
immer dieselbe Stellgr
¨
oße. Bild 3.9 zeigt die modifizierte Struktur.
Durch das zus
¨
atzliche S
¨
attigungsglied sind Beobachtungsfehler ausge-
schlossen, die aus einer Verletzung der Stellgr
¨
oßenbeschr
¨
ankung resultieren.
Obige einfache Struktur erm
¨
oglicht im Allgemeinen auch dann eine gute Aus-
regelqualit
¨
at, wenn der Regelkreis vor
¨
ubergehend in der S
¨
attigung betrieben
wird. Dies gilt vor allem f
¨
ur stabile Regelstrecken.
Wir betrachten nun den Beobachter
˙
˜x =
A − lc
T
˜x + bu + ly = F ˜x + bu + ly
und erhalten mit den Laplace-Transformierten
˜
X(s), U(s) und Y (s)
s
˜
X(s) − ˜x(0) = F ·
˜
X(s)+b · U(s)+l · Y (s)
und mit ˜x(0) = 0 die Gleichung
˜
X(s)=(sI −F )
−1
b · U(s)+(sI − F )
−1
l · Y (s).
Zusammen mit dem Zustandsregler
3.1. Regler mit Antiwindup 123
w
u
u
c
u
k
y
˜x
k
T
V
˙
˜x = A ˜x + bu
+ l
`
y − c
T
˜x
´
˙x = Ax + bu
y = c
T
x
Regelstrecke
Beobachter
Bild 3.9: Regelkreis mit zus
¨
atzlicher Begrenzungskennlinie zur Vermeidung negativer
Auswirkungen der Stellgr
¨
oßenbegrenzung.
U
k
(s)=k
T
˜
X(s)
gilt
U
k
(s)=k
T
(sI − F )
−1
b · U(s)+k
T
(sI − F )
−1
l · Y (s).
Man erh
¨
alt also zwei
¨
Ubertragungsfunktionen,
H
1
(s)=
U
k
(s)
U(s)
= k
T
(sI − F )
−1
b =
Z
1
(s)
Δ(s)
und
H
2
(s)=
U
k
(s)
Y (s)
= k
T
(sI − F )
−1
l =
Z
2
(s)
Δ(s)
,
die den Zusammenhang zwischen u
k
und u bzw. y beschreiben. H
1
(s) und
H
2
(s) haben denselben Nenner
Δ(s)=det(sI − F ).
Wir k
¨
onnen den Regelkreis mit Beobachter also auch mittels
¨
Ubertragungs-
funktionen darstellen, so wie es Bild 3.10 zeigt. Bei dieser Betrachtungsweise
interpretieren wir jetzt die zus
¨
atzliche S
¨
attigungskennlinie
u =sat(u
c
)
als eine Art von Antiwindup-Element f
¨
ur die
¨
Ubertragungsglieder H
1
(s) und
H
2
(s). Denn das Antiwindup-Element vermeidet auch hier unerw
¨
unschte Aus-
wirkungen der Stellgr
¨
oßenbegrenzung bei den als Regler wirkenden
¨
Ubertra-
gungsgliedern H
1
(s) und H
2
(s).
124 Kapitel 3. Regelungen f
¨
ur lineare Regelstrecken
w
u
u
c
u
k
y
V (s)
G(s)= c
T
(sI−A)
−1
b
H
2
(s)=
Z
2
(s)
Δ(s)
H
1
(s)=
Z
1
(s)
Δ(s)
Regelstrecke
Antiwindup-
Element
Bild 3.10: Zustandsregelkreis mit Kontrollbeobachter, dargestellt durch
¨
Ubertra-
gungsfunktionen, und Antiwindup-Element.
Es sei angemerkt, dass H
1
(s) und H
2
(s) die Nennerordnung n, also die
Systemordnung von A, besitzen, da wir den Zustandsvektor x vollst
¨
andig re-
konstruiert haben. Im Falle eines reduzierten Beobachters weisen H
1
(s) und
H
2
(s) eine niedrigere Systemordnung auf, n
¨
amlich die des reduzierten Beob-
achters.
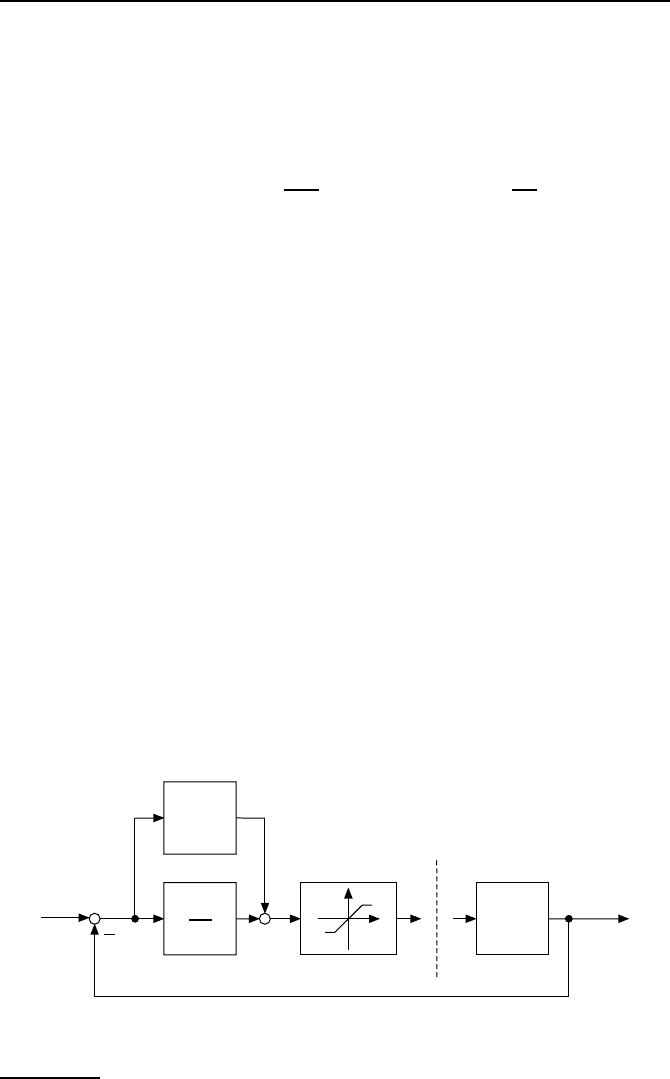
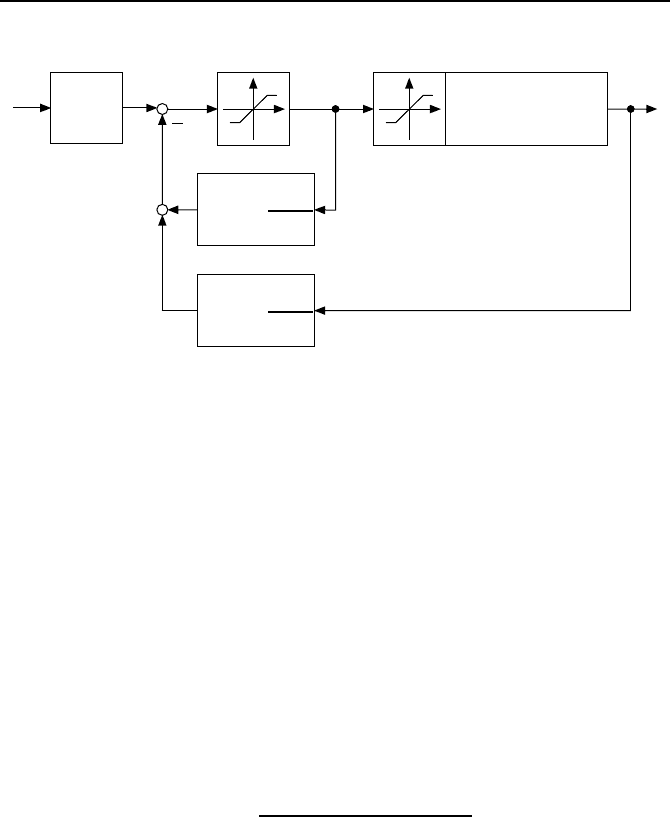
Wir haben des Weiteren die Struktur des Regelkreises in Bild 3.10 ver-
allgemeinert, indem wir anstelle des Vorfilters V eine
¨
Ubertragungsfunktion
V (s) als Vorfilter zulassen. Die Funktionsweisen des Antiwindups sowie des
Zustandsreglers mit Beobachter bleiben davon unbeeinflusst.
Wir betrachten nun wieder den klassischen Regelkreis mit einer Regelstre-
cke G(s) und einem Regler H(s)f
¨
ur den wir ein Antiwindup suchen. Dieser
Regelkreis, der in den Bildern 3.7 und 3.11 dargestellt ist, hat im linearen,
d. h. unges
¨
attigten Fall die
¨
Ubertragungsfunktion
G(s)=
Z
R
(s)Z(s)
N
R
(s)N(s)+Z
R
(s)Z(s)
.
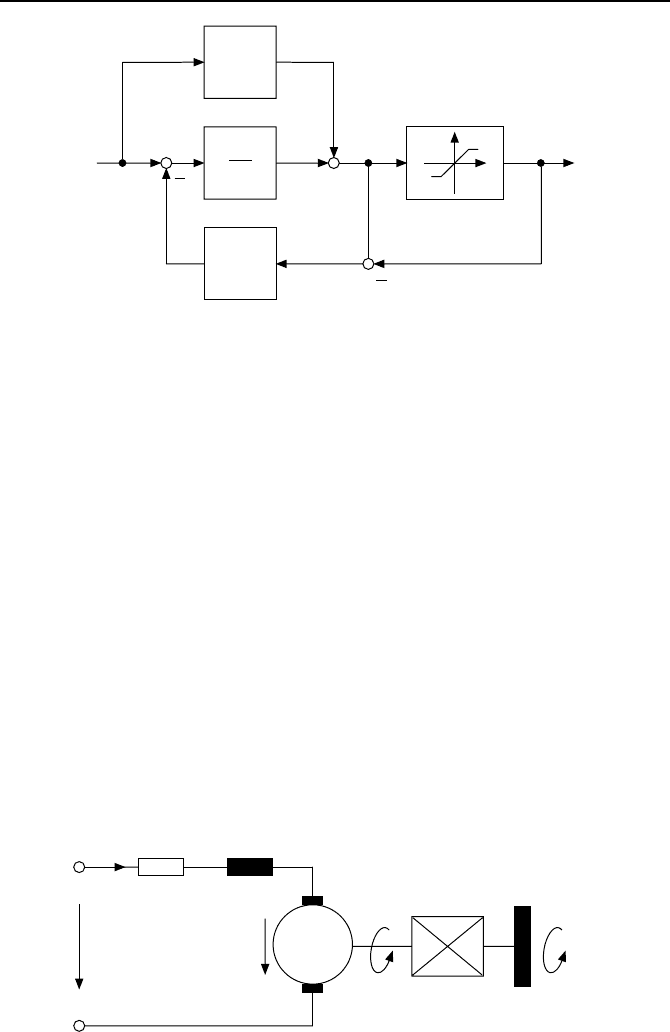
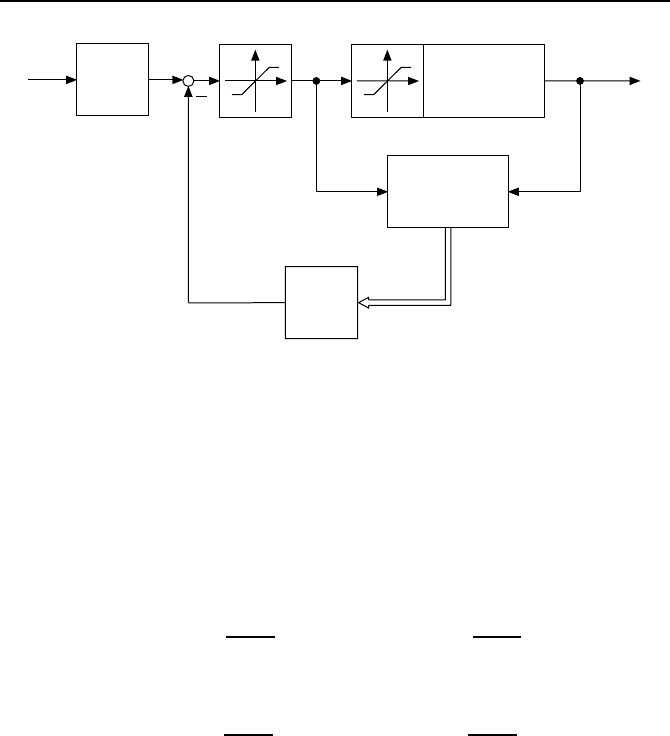
Die Regelkreisstruktur aus Bild 3.11 l
¨
asst sich in die
¨
aquivalente Struktur des
Bildes 3.12 umformen. Dabei f
¨
uhrt man zus
¨
atzlich das Polynom Δ(s)ein.
Denn dann entspricht die Struktur aus Bild 3.12 bis auf das Antiwindup-
Element vollst
¨
andig der des Zustandsregelkreises mit Beobachter aus Bild
3.10. Das Antiwindup-Element f
¨
ugt man nun auch in den Regelkreis aus Bild
3.12 ein. Bild 3.13 zeigt den sich so ergebenden Regelkreis mit Antiwindup.
Man hat auf diese Weise aus den
¨
Uberlegungen zur Vermeidung von
S
¨
attigungseffekten beim Zustandsregler mit Beobachter ein Antiwindup f
¨
ur
den Standardregelkreis mit beliebigem linearen Regler H(s) gewonnen. Die
zuletzt betrachtete Regelkreisstruktur des Bildes 3.13 bildet also die L
¨
osung