J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.

94 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
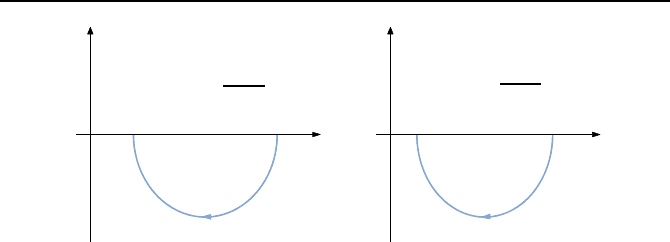
1
1
1.33
2
Im
Im
ReRe
G
11
(s)=
s +2
s +1
G
22
(s)=
s +4
s +3
Bild 2.56: Ortskurven der beiden Teilsysteme.
F
¨
ur die Popov’sche Integralungleichung erh
¨
alt man
t
0
v
T
(τ)y(τ) dτ =
t
0
(y
1
(τ)sat(K
R1
y
1
(τ)) + y
2
(τ)sat(K
R2
y
2
(τ))) dτ ≥−ε
2
0
.
Diese Ungleichung ist sicher erf
¨
ullt f
¨
ur alle t ≥ 0, da
y
i
sat(K
Ri
y
i
) ≥ 0
f
¨
ur alle y
i
∈ IR und alle K
Ri
> 0, i =1, 2, gilt. Der Regelkreis (2.13), (2.16)
besitzt also in x = 0 eine global asymptotisch stabile Ruhelage.
In einem weiteren Beispiel f
¨
ur die Anwendung von Satz 8 betrachten wir
eine Regelstrecke ohne Durchgriff
˙x = Ax + Bu,
y = Cx.
(2.17)
Wir gehen davon aus, dass f
¨
ur sie die Kalman-Jakubovich-Gleichungen
A
T
R + RA = −LL
T
,
C
T
= RB
erf
¨
ullt sind. Uns interessiert nun, welche Regler
u = −v = −K(t) · y (2.18)
zu einem stabilen Regelkreis f
¨
uhren. Um dies herauszufinden, setzen wir das
Regelgesetz (2.18) in die Popov’sche Integralungleichung ein und erhalten
t
0
y
T
K(τ)y dτ ≥−ε
2
0
.

2.4. Die Stabilit
¨
atstheorie von Ljapunov 95
Hinreichend f
¨
ur die Erf
¨
ullung dieser Ungleichung und damit auch f
¨
ur die
Stabilit
¨
at des Regelkreises (2.17), (2.18) ist die Forderung, dass die Matrix
K(t) positiv semidefinit f
¨
ur alle t ≥ 0 ist. Man beachte, dass die Reglermatrix
K(t)auchvonx(t)odery(t)abh
¨
angen darf, d. h. die Form K(x(t)) oder
K(y(t)) aufweisen darf.
2.4 Die Stabilit
¨
atstheorie von Ljapunov
2.4.1 Die Idee und die direkte Methode
In den vorherigen Kapiteln wurden Verfahren zur Stabilit
¨
atsanalyse nichtli-
nearer Regelkreise betrachtet, die bestimmten eingeschr
¨
ankten Systemklassen
zuzuordnen sind. Dies waren u. a. das Verfahren der harmonischen Balance,
das Popov-Kriterium und das Hyperstabilit
¨
atskriterium. F
¨
ur die Regelungs-
technik sind oben genannte Verfahren wichtig, da sie in der Praxis oft vor-
kommende Regelkreisstrukturen behandeln.
Allgemeine Verfahren zur Stabilit
¨
atsanalyse nichtlinearer Systeme sind
diese Verfahren aber leider nicht. Ein solches Verfahren wurde 1892 von A.
M. Ljapunov
[1]
angegeben [117, 118, 119]. Es hat eine Vielzahl von Erweite-
rungen erfahren [12, 64, 66, 157]. Prinzipiell sind mit Ljapunovs Verfahren
alle dynamischen Systeme auf ihre Stabilit
¨
at hin untersuchbar. Es wird sich
allerdings zeigen, dass dies praktisch oft nicht m
¨
oglich ist. Das Verfahren Lja-
punovs l
¨
ost das Problem der Stabilit
¨
atsuntersuchung nichtlinearer Systeme
also auch nicht vollst
¨
andig.
Um die Grundidee Ljapunovs zu skizzieren, betrachtet man verschiedene
F
¨
alle m
¨
oglichen Stabilit
¨
atsverhaltens anhand des Beispiels einer Kugel mit
Reibung unter Einwirkung der Erdbeschleunigung g. Bild 2.57 illustriert ent-
sprechende Anordnungen. Nur die linke weist eine stabile Ruhelage auf.
x
y
z
g
Bild 2.57: Stabilit
¨
atssituationen einer Kugel im Gravitationsfeld.
[1]
Im Deutschen ist auch die Schreibweise Ljapunow, im Englischen Lyapunov oder
seltener Liapunov gebr
¨
auchlich.
96 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Die potenzielle Energie
E
p
= mgy
der Kugel mit der Masse m ist proportional zur H
¨
ohe y. Durch die jeweili-
ge Anordnung ist eine Zwangsbewegung auf einer bestimmten Bahn vorge-
schrieben, so dass die y-Koordinate eine Funktion f von x und z ist. F
¨
ur die
potenzielle Energie gilt also auch
E
p
= mgf(x, z).
Offensichtlich ist eine Ruhelage nur stabil, wenn die potenzielle Energie in
der Ruhelage ein Minimum besitzt. D. h., dass im betrachteten Beispiel die
Funktion f ein Minimum besitzen muss.
Dies allein reicht allerdings noch nicht aus, um die Stabilit
¨
at sicherzustel-
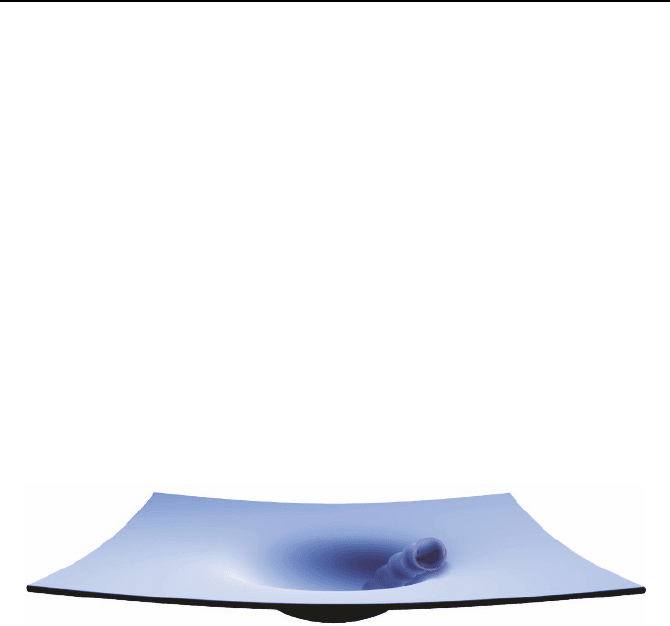
len, wie folgende Erweiterung des Beispiels zeigt. Nun soll in der Kugel ein
Antrieb enthalten sein, der dazu f
¨
uhrt, dass sie aufschwingt, wie es Bild 2.58
illustriert. Dann ist die Ruhelage nicht stabil, obwohl die potenzielle Energie
Bild 2.58: Kugel mit Energiequelle und Antrieb zum Aufschwingen.
ein Minimum aufweist. Dies ist darauf zur
¨
uckzuf
¨
uhren, dass das System eine
innere Energiequelle besitzt.
Außer der Forderung, dass die potenzielle Energie ein Minimum besitzt,
ist offensichtlich eine weitere Bedingung n
¨
otig, damit eine Ruhelage stabil ist.
Man fordert daher zus
¨
atzlich, dass die potenzielle Energie entlang aller Tra-
jektorien in der Umgebung der Ruhelage abnimmt oder zumindest konstant
bleibt.
Betrachtet man diese
¨
Uberlegungen genauer, so scheint man sich von der
Ausgangsposition einer potenziellen Energiefunktion l
¨
osen und obige Vorge-
hensweise verallgemeinern zu k
¨
onnen. Es scheint ausreichend zu sein, eine be-
liebige Funktion zu betrachten, die folgende zwei Forderungen erf
¨
ullt, damit
eine Ruhelage stabil ist:
(1) Die Funktion muss in der Ruhelage ein Minimum besitzen.
(2) Die Funktion muss in einer Umgebung der Ruhelage entlang aller Trajek-
torien abnehmen.
2.4. Die Stabilit
¨
atstheorie von Ljapunov 97
Das ist die Grundidee der direkten Methode von Ljapunov,auchzweite Metho-
de genannt. Und A. M. Ljapunov hat den folgenden, f
¨
ur die Stabilit
¨
atsanalyse
dynamischer Systeme zentralen Satz bewiesen.
Satz 9 (Direkte Methode von Ljapunov). Die Differenzialgleichung
˙x = f(x) mit der Ruhelage x
R
= 0 besitze f
¨
ur jeden Anfangswert aus einer
Umgebung U
1
(0) des Ursprungs eine stetige und eindeutige L
¨
osung. Existiert
dann eine Funktion V (x) mit
(1) V (0)=0,
die in einer Umgebung U
2
(0) ⊆ U
1
(0) stetig ist, stetige partielle Ableitungen
besitzt und dort mit Ausnahme von x = 0 die Bedingungen
(2) V (x) > 0,
(3)
˙
V (x) ≤ 0(bzw.
˙
V (x) < 0)
erf
¨
ullt, so ist die Ruhelage x
R
= 0 stabil im Sinne von Ljapunov (bzw. asym-
ptotisch stabil).
Die Bedingungen (1) und (2) stellen sicher, dass V ein Minimum in x = 0
besitzt. Die Bedingung (3) bedeutet, dass V entlang aller Trajektorien aus
U
2
(0) mit der Zeit abnimmt oder konstant bleibt. Es sei noch einmal darauf
hingewiesen, dass die Annahme einer Ruhelage in x = 0 keine Einschr
¨
ankung
der Allgemeinheit ist. Denn jede Ruhelage kann, wie in Abschnitt 1.1.3 fest-
gestellt, nach x = 0 transformiert werden.
Satz 9 erm
¨
oglicht es zu
¨
uberpr
¨
ufen, ob eine Ruhelage stabil im Sinne von
Ljapunov oder asymptotisch stabil ist. Abh
¨
angig ist dies davon, ob
˙
V (x) ≤ 0
oder
˙
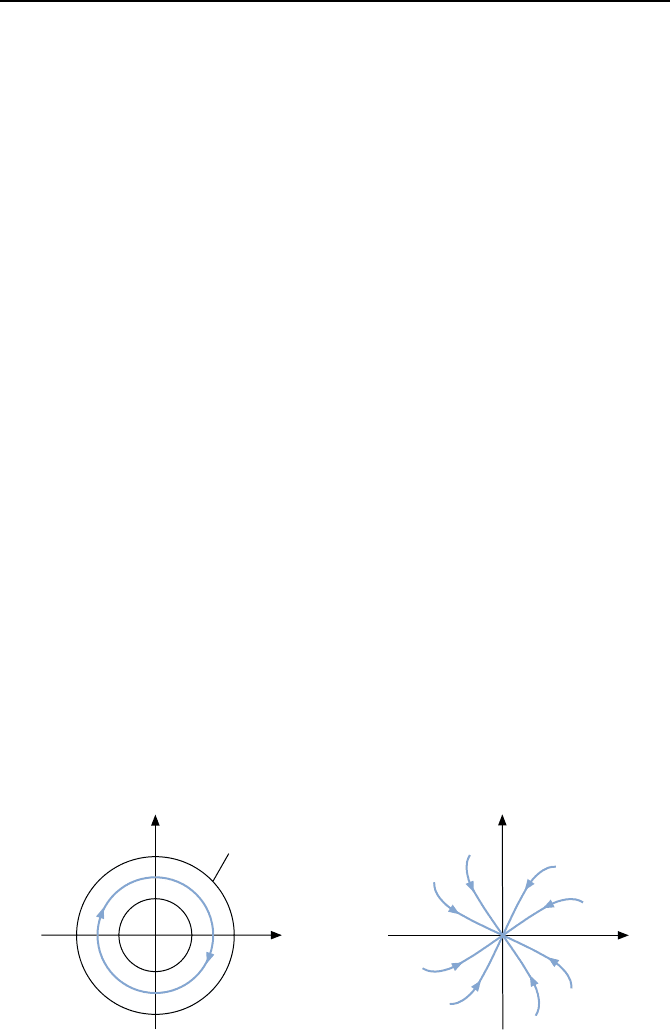
V (x) < 0 ist. Bild 2.59 illustriert den Fall
˙
V (x) ≤ 0. Im Fall, dass auch
˙
V (x) = 0 gilt, k
¨
onnen Trajektorien x(t), die nicht in die Ruhelage x
R
= 0
laufen, die Ungleichung
˙
V (x) ≤ 0erf
¨
ullen. D. h., die Ruhelage ist nur stabil
im Sinne von Ljapunov. In Bild 2.60 dagegen ist der Fall der asymptotischen
Stabilit
¨
at dargestellt. Er liegt vor, wenn V (x) entlang aller Trajektorien x(t)
abnimmt, also f
¨
ur die zeitliche Ableitung
˙
V (x) < 0 gilt.
x
1
x
2
V (x)=c
Bild 2.59: Stabilit
¨
at im Sinne von
Ljapunov.
x
2
x
1
Bild 2.60: Beispiel f
¨
ur asymptotische
Stabilit
¨
at.
98 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Sind die Bedingungen (2) und (3) im gesamten Zustandsraum erf
¨
ullt und
gilt zus
¨
atzlich
V (x) →∞ f
¨
ur |x|→∞, (2.19)
so ist die Ruhelage global stabil im Sinne von Ljapunov (bzw. global asym-
ptotisch stabil). Eine Funktion mit der Eigenschaft (2.19) bezeichnet man als
radial unbeschr
¨
ankt.
Funktionen V (x), welche die Bedingungen des Stabilit
¨
atssatzes 9 erf
¨
ullen,
nennt man Ljapunov-Funktionen. Praktisch bildet man die Ableitung einer
Ljapunov-Funktion V (x) nach der Zeit mittels des Gradienten
˙
V (x)= ˙x
T
grad V (x)=
n
i=1
˙x
i
∂V
∂x
i
(2.20)
und setzt die Ableitung des Zustandsvektors
˙x = f(x)
in Gl. (2.20) ein. Dann hat man zu pr
¨
ufen, ob
˙
V (x) ≤ 0bzw.
˙
V (x) < 0f
¨
ur
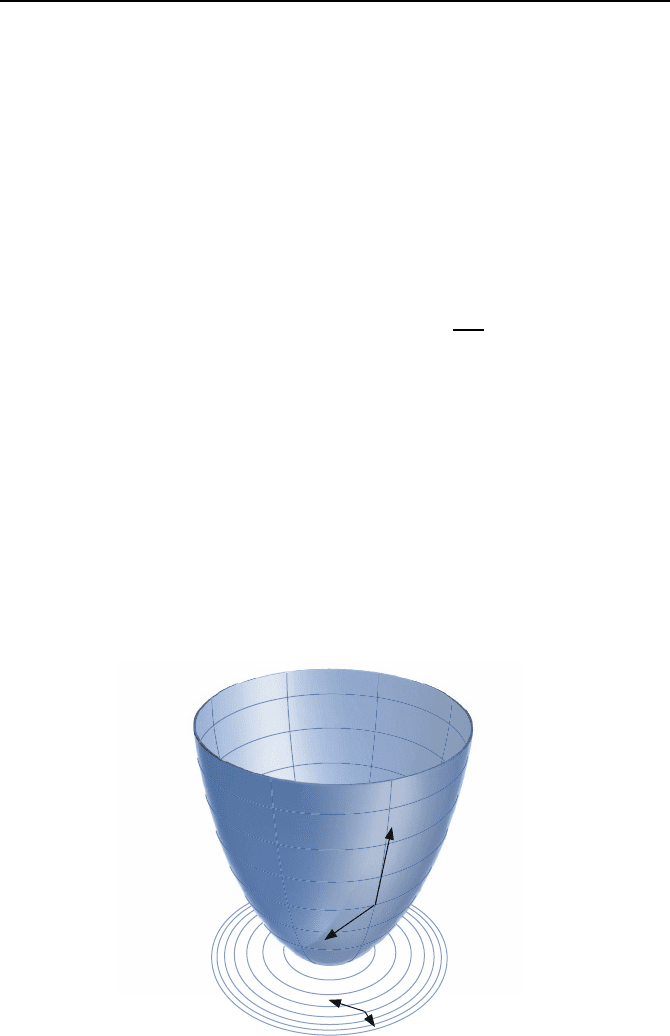
x = 0 gilt. Dies veranschaulicht Bild 2.61. Man ben
¨
otigt bei der Anwendung
von Satz 9 also nicht die L
¨
osung der Differenzialgleichung, die im Falle nicht-
linearer Systeme oft auch gar nicht analytisch bestimmbar ist. Die direkte
Verwendung der Differenzialgleichung bei der Berechnung von
˙
V (x)gibtder
Methode ihren Namen.
•
•
grad V (x)
˙x
Bild 2.61: Veranschaulichung der Gleichung
˙
V (x)= ˙x
T
grad V (x) < 0.

2.4. Die Stabilit
¨
atstheorie von Ljapunov 99
Wir wollen nun noch den Fall betrachten, dass wir eine Ljapunov-Funktion
V f
¨
ur ein System
˙
x = f (x) kennen, f
¨
ur die wir nur
˙
V (x) ≤ 0 und daher
mit Satz 9 nur Stabilit
¨
at im Sinne von Ljapunov und keine asymptotische
Stabilit
¨
at nachweisen k
¨
onnen. Existiert nun keine Trajektorie x(t), die bei ir-
gendeinem Anfangswert x(0) beginnt und entlang derer die Ableitung
˙
V (x(t))
fortw
¨
ahrend identisch null ist, so nimmt V entlang aller Trajektorien aus der
Umgebung der Ruhelage x
R
= 0 ab. Folglich ist die asymptotische Stabi-
lit
¨
at der Ruhelage auch in diesem Fall nachweisbar [13]. Wir formulieren dies
pr
¨
aziser in
Satz 10 (Satz von Barbashin und Krasovskii). Die Differenzialglei-
chung ˙x = f(x) mit der Ruhelage x
R
= 0 besitze f
¨
ur jeden Anfangswert aus
einer Umgebung U
1
(0) des Ursprungs eine stetige und eindeutige L
¨
osung. Es
existiere eine Funktion V (x) mit
(1) V (0)=0,
die in einer Umgebung U
2
(0) ⊆ U
1
(0) stetig ist, stetige partielle Ableitungen
besitzt und dort mit Ausnahme von x = 0 die folgenden Bedingungen erf
¨
ullt:
(2) V (x) > 0
(3)
˙
V (x) ≤ 0
(4) Die Menge von Zust
¨
anden x,f
¨
ur die
˙
V (x)=0gilt, enth
¨
alt keine Trajek-
torie x(t).
Dann ist die Ruhelage x
R
= 0 asymptotisch stabil.
Ist die Ljapunov-Funktion des obigen Satzes außerdem noch radial unbe-
schr
¨
ankt und ist U
2
(0)=IR
n
, so ist die Ruhelage global asymptotisch stabil.
Satz 10 erweist sich in der Praxis oft als n
¨
utzlich, wenn man nur eine
Ljapunov-Funktion mit
˙
V (x) ≤ 0 finden kann. Die Bedingung (4) l
¨
asst sich
¨
uberpr
¨
ufen, indem man die Menge der Werte x bestimmt, f
¨
ur die
˙
V (x)=0
ist. Diese Werte setzt man in ˙x = f (x) ein. Enthalten sie eine andere L
¨
osung
der Differenzialgleichung als x = 0, so ist die Bedingung (4) nicht erf
¨
ullt.
Meistens ist sie allerdings erf
¨
ullt, denn nur in seltenen F
¨
allen verl
¨
auft eine
Tra jektorie x(t)fortw
¨
ahrend auf einer H
¨
ohenlinie der Ljapunov-Funktion V ,
was identisch mit
˙
V (x(t)) = 0 ist.
Das Problem bei der Anwendung obiger Stabilit
¨
atss
¨
atze ist das Auffinden
einer Ljapunov-Funktion V (x). F
¨
ur das eine oder andere nichtlineare System,
wie das im nachfolgenden Abschnitt, und f
¨
ur lineare Systeme ist die Ermitt-
lung einer Ljapunov-Funktion aufgrund der Anschauung einfach. Im allgemei-
nen Fall stellt es sich allerdings als außerordentlich problematisch heraus, eine
Ljapunov-Funktion zu bestimmen. Zwar gibt es eine Reihe von Konstruktions-
methoden f
¨
ur Ljapunov-Funktionen [52, 144] wie die Methoden von Aiserman,
die von Schultz und Gibson, die von Ingwerson oder die Methode von Zubow.
Doch sind sie nur auf Spezialf
¨
alle anwendbar und in vielen F
¨
allen aufwendig
zu handhaben. Letztendlich ist man daher in der Mehrzahl der F
¨
alle auf das
Ausprobieren verschiedener Funktionsans
¨
atze f
¨
ur V (x) angewiesen.
100 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
2.4.2 Illustrationsbeispiel
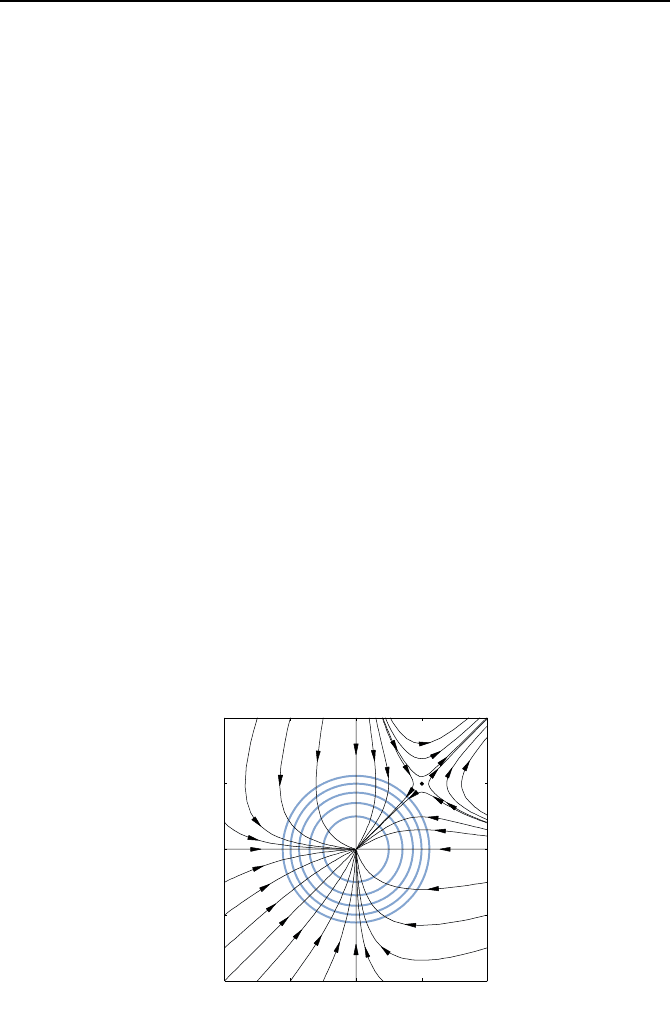
Es folgt ein Beispiel. Und zwar betrachten wir das schon im Abschnitt 1.1.6
behandelte System
˙x
1
= x
1
(x
2
− 1),
˙x
2
= x
2
(x
1
− 1)
mit den Ruhelagen x
R1
= 0 und x
R2
=[1 1]
T
. Seine Trajektorien zeigt
Bild 2.62. Eine Kandidatin f
¨
ur eine Ljapunov-Funktion zum Nachweis der
Stabilit
¨
at der Ruhelage x
R1
= 0 ist
V (x)=x
2
1
+ x
2
2
,
denn es gilt V (0) = 0 und sonst V (x) > 0. Die H
¨
ohenlinien von V haben die
Form von Kreisen. Die Ruhelage x
R2
ist, wir erinnern uns, instabil.
Es ist jetzt zu
¨
uberpr
¨
ufen, ob die Funktion
V (x)=x
2
1
+ x
2
2
entlang aller Systemtrajektorien x(t)inderN
¨
ahe der Ruhelage abnimmt. Man
bildet zu diesem Zweck
˙
V (x)= ˙x
T
grad V (x)
=
˙x
1
˙x
2
2x
1
2x
2
=2x
2
1
(x
2
− 1) + 2x
2
2
(x
1
− 1).
Zustand x
2
Zustand x
1
2
1
0
-1
-2
-2
-1
0
1
2
Bild 2.62: Trajektorien x(t) und kreisf
¨
ormige H
¨
ohenlinien (blau) der Ljapunov-
Funktion V (x)=x
2
1
+ x
2
2
.
2.4. Die Stabilit
¨
atstheorie von Ljapunov 101
Es gilt
˙
V (x) < 0f
¨
ur x
1
< 1 und x
2
< 1,
so dass die Ruhelage
x
R
= 0
asymptotisch stabil und
V (x)=x
2
1
+ x
2
2
eine Ljapunov-Funktion ist. Bild 2.62 illustriert diese Ergebnisse, wobei die
H
¨
ohenlinien von V (x), wie gesagt, Kreise bilden.
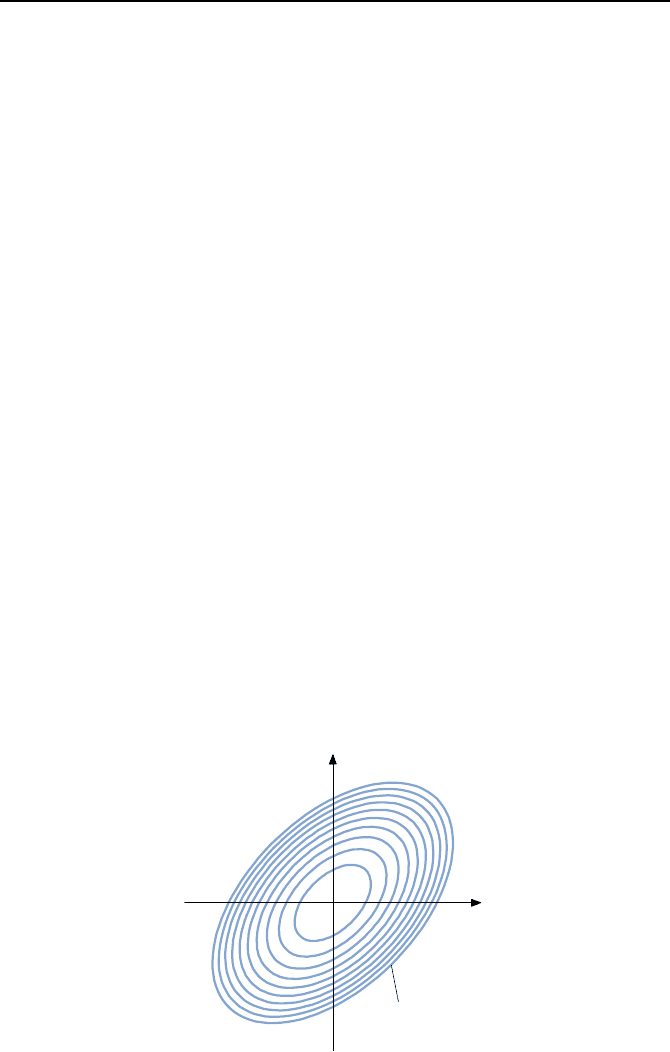
2.4.3 Quadratische Ljapunov-Funktionen
Funktionen mit kreis- oder ellipsoidf
¨
ormigen H
¨
ohenlinien scheinen, aus rein
anschaulichen Motiven heraus, geeignete Kandidatinnen von Ljapunov-Funk-
tionen f
¨
ur verschiedene Systeme zu sein. Ihre allgemeine Form ist durch positiv
definite quadratische Formen
V (x)=x
T
Rx
gegeben. Bild 2.63 zeigt die H
¨
ohenlinien einer solchen Funktion.
Die Bedingung (1) des Satzes 9,
V (0)=0,
ist ersichtlich erf
¨
ullt, und wenn R eine positiv definite Matrix ist, ist es auch
die Bedingung (2), d. h.
V (x) > 0f
¨
ur x = 0.
V (x)=const
x
1
x
2
Bild 2.63: H
¨
ohenlinien einer quadratischen Funktion.
102 Kapitel 2. Grenzzyklen und Stabilit
¨
atskriterien
Es bleibt die
¨
Uberpr
¨
ufung der Bedingung (3), d. h.
˙
V (x) ≤ 0bzw.
˙
V (x) < 0,
f
¨
ur das jeweils betrachtete System.
Inwieweit sich der Ansatz quadratischer Formen x
T
Rxf
¨
ur eine Ljapunov-
Funktion als tragf
¨
ahig erweist, soll anhand linearer Systeme
˙x = Ax (2.21)
untersucht werden. Es gilt mit
V (x)=x
T
Rx
f
¨
ur
˙
V (x) die Gleichung
˙
V (x)=x
T
R ˙x + ˙x
T
Rx.
Setzt man Gl. (2.21) hierin ein, so erh
¨
alt man
˙
V (x)=x
T
RA x + x
T
A
T
Rx
= x
T
RA + A
T
R
!
−Q
x.
Fordert man f
¨
ur asymptotische Stabilit
¨
at
˙
V (x)=−x
T
Qx< 0,
so muss die Matrix Q positiv definit sein.
Ergibt sich also aus der Matrixgleichung
A
T
R + RA = −Q (2.22)
eine positiv definite Matrix Q,dannistV (x)=x
T
Rx eine Ljapunov-Funk-
tion und das System ˙x = Ax asymptotisch stabil. Man kann auch umge-
kehrt vorgehen, eine beliebige positiv definite Matrix Q vorgeben und – wenn
das System (2.21) stabil ist – eine positiv definite Matrix R und damit
eine Ljapunov-Funktion bestimmen. Die Gleichung (2.22) heißt Ljapunov-
Gleichung. Es gilt der folgende Satz.
Satz 11 (Ljapunov-Gleichung). Die Ruhelage x
R
= 0 des linearen Sys-
tems ˙x = Ax ist genau dann asymptotisch stabil, wenn f
¨
ur eine beliebige re-
elle, symmetrische, positiv definite Matrix Q ein R existiert, so dass
A
T
R + RA = −Q
gilt. Die Funktion V = x
T
Rx ist dann eine Ljapunov-Funktion des Systems.

2.4. Die Stabilit
¨
atstheorie von Ljapunov 103
F
¨
ur stabile lineare Systeme k
¨
onnen also immer quadratische Ljapunov-
Funktionen gefunden werden. Zumindest in diesem Fall erweist sich der Ansatz
solcher Ljapunov-Funktionen als sehr geeignet.
Satz 11 hat eigentlich keine Bedeutung bei der Stabilit
¨
atsanalyse linearer
Systeme. Diese kann man bekanntlich anhand der Systemeigenwerte einfa-
cher durchf
¨
uhren. Seine Bedeutung liegt vielmehr in der Entwurfstheorie vie-
ler nichtlinearer Regelungen und auch in der Stabilit
¨
atsanalyse linearisierter
nichtlinearer Systeme. Wir werden uns diesen Themen sp
¨
ater noch widmen.
2.4.4 Die direkte Methode f
¨
ur zeitdiskrete Systeme
¨
Ahnlich wie im Fall kontinuierlicher Systeme kann die direkte Methode von
Ljapunov auch bei zeitdiskreten Systemen
x
k+1
= f(x
k
)
genutzt werden. Die ersten beiden Bedingungen des Stabilit
¨
atssatzes 9, V (0)=
0 und V (x) > 0f
¨
ur alle x = 0, gelten unvermindert. Lediglich die dritte Be-
dingung,
˙
V (x) < 0f
¨
ur alle x = 0,
die wir hier nur f
¨
ur den asymptotisch stabilen Fall betrachten, ist durch die
Bedingung
ΔV
k
= V (x
k+1
) − V (x
k
) < 0f
¨
ur alle x
k
= 0
zu ersetzen.
Im Fall linearer Systeme
x
k+1
= Φx
k
und quadratischer Ljapunov-Funktionen
V (x)=x
T
k
Rx
k
erh
¨
alt man
ΔV
k
= x
T
k+1
Rx
k+1
− x
T
k
Rx
k
= x
T
k
Φ
T
RΦx
k
− x
T
k
Rx
k
= x
T
k
(Φ
T
RΦ− R)x
k
< 0.
Die obige Ungleichung ist offensichtlich erf
¨
ullt, wenn die Matrix Q in der
Gleichung
Φ
T
RΦ− R = −Q (2.23)
positiv definit ist. Gl. (2.23) wird als diskrete Ljapunov-Gleichung bezeich-
net. Im Gegensatz zur Ljapunov-Gleichung im kontinuierlichen Fall ist die
Ljapunov-Gleichung (2.23) quadratisch von der Systemmatrix Φ abh
¨
angig.