J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.

236 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
⎡
⎢
⎢
⎢
⎣
y
min,1
y
min,2
.
.
.
y
min,r
⎤
⎥
⎥
⎥
⎦
y
min
≤
⎡
⎢
⎢
⎢
⎣
y
1
(k)
y
2
(k)
.
.
.
y
r
(k)
⎤
⎥
⎥
⎥
⎦
y(k)
≤
⎡
⎢
⎢
⎢
⎣
y
max,1
y
max,2
.
.
.
y
max,r
⎤
⎥
⎥
⎥
⎦
y
max
unterliegen. Diese lassen sich im Fall der betrachteten linearen Systeme in
Beschr
¨
ankungen der Stellgr
¨
oßen
¨
anderung umrechnen. So gilt f
¨
ur
¯y
min
≤ ¯y(k +1)≤ ¯y
max
mit Gl. (5.9)
¯y
min
≤ g(k)+HΔ¯u(k) ≤ ¯y
max
. (5.15)
Dabei ist ¯y
min
=
y
T
min
···y
T
min
T
∈ IR
rn
p
×1
und f
¨
ur ¯y
max
gilt Entsprechen-
des. Beschr
¨
ankungen von x
i
sehen
¨
ahnlich aus.
Zusammengefasst lassen sich die Ungleichungen (5.13), (5.14) und (5.15)
in die Form
W Δ¯u(k) ≤ w
mit
W =
⎡
⎢
⎢
⎢
⎢
⎢
⎢
⎣
−D
D
−I
I
−H
H
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎦
und w =
⎡
⎢
⎢
⎢
⎢
⎢
⎢
⎣
−¯u
min
+ Eu(k − 1)
¯u
max
− Eu(k − 1)
−Δ¯u
min
Δ¯u
max
−¯y
min
+ g(k)
¯y
max
− g(k)
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎦
bringen. So erh
¨
alt man ein beschr
¨
anktes Optimierungsproblem der Form
min
Δ¯u(k)
J(Δ¯u(k)) (5.16)
mit den linearen Restriktionen
W · Δ¯u(k) ≤ w. (5.17)
Ist die G
¨
utefunktion durch eine positiv definite quadratische Form gege-
ben, wie im vorherigen Abschnitt 5.1.2, so k
¨
onnen wir die G
¨
utefunktion (5.11)
verwenden und es liegt ein konvexes quadratisches Optimierungsproblem mit
linearen Restriktionen vor. In diesem Fall besitzt das quadratische Optimie-
rungsproblem (5.16), (5.17) nur ein Minimum. Dieses Minimum kann in der
Regel nicht analytisch, sondern nur numerisch bestimmt werden. Es existieren
allerdings sicher konvergente Standardverfahren der quadratischen Program-
mierung, kurz QP-Verfahren genannt, mit denen das Minimum berechenbar
ist [16, 29, 125]. An dieser Stelle werden die Nachteile der modelbasierten
pr
¨
adiktiven Regelung deutlich: Das Regelgesetz ist nicht explizit angebbar
und seine Auswertung zeitaufwendig.
5.1. Modellbasierte pr
¨
adiktive Regelung 237
5.1.4 Beispiel Entw
¨
asserungssystem
Zur Entw
¨
asserung von Gebieten mit hohem Grundwasserspiegel, wie sie z. B.
in den Niederlanden oder den Everglades der USA vorkommen, werden Kanal-
systeme eingesetzt. Insbesondere bei oder nach starken Regenf
¨
allen muss Was-
ser aus den Entw
¨
asserungskan
¨
alen in benachbarte Fl
¨
usse oder das Meer abge-
pumpt werden. Ansonsten w
¨
urde ein zu hoher Wasserstand Deich, D
¨
orfer und
landwirtschaftliche Fl
¨
achen gef
¨
ahrden. Ein zu niedriger Wasserstand in den
Kan
¨
alen ist allerdings auch problematisch, da hierdurch B
¨
oschungsrutsche ver-
ursacht werden k
¨
onnen. Auch große Schwankungen des Wasserstandes k
¨
onnen
durch Pumpeffekte eine Auflockerung des Erdreiches in den Kanalwandungen
bewirken, die eine Besch
¨
adigung der Kan
¨
ale nach sich zieht.
Man m
¨
ochte den Wasserstand in den Kan
¨
alen daher weder zu niedrig noch
zu hoch werden lassen. Vielmehr soll sich der Wasserstand innerhalb eines vor-
gegebenen Toleranzbandes bewegen. Zu diesem Zweck setzt man Regelungen
ein, mit denen die aus den Kan
¨
alen abgepumpte Wassermenge festgelegt wird.
Bild 5.5 zeigt den Aufbau eines solchen Entw
¨
asserungssystems. Bei meeres-
nahen Anlagen werden zus
¨
atzlich Speicherkan
¨
ale genutzt, in die das Wasser
bei Hochwasser gepumpt wird. Bei Niedrigwasser fließt das Wasser dann ohne
zus
¨
atzliche Pumpleistung ins Meer ab.
Der Wasserstand h im Kanalsystem ist abh
¨
angig vom Regenwasser, das in
die Kan
¨
ale fließt, und der Menge des abgepumpten Wassers [140] gem
¨
aß der
Beziehung
Bild 5.5: Entw
¨
asserungssystem.

238 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
h(k +1)=h(k)+
T
A
(q
Re
(k) − q
P
(k − k
d
)). (5.18)
Dabei gibt q
Re
die Wassermenge pro Sekunde an, die aufgrund von Regenf
¨
allen
oder eventuell nachstr
¨
omendem Grundwasser in die Kan
¨
ale fließt, und q
P
die
abgepumpte Wassermenge pro Sekunde. Die Fl
¨
ache A umfasst die gesamte
Fl
¨
ache der Kan
¨
ale, T ist die Zeitspanne in Sekunden zwischen den Zeitpunkten
k und k + 1 und k
d
ist die Anzahl der Zeitschritte, nach denen die Stellgr
¨
oße
q
P
auf den Wasserstand in den Kan
¨
alen wirkt.
Wir betrachten das Entw
¨
asserungssystem des Delflandes in den Nieder-
landen. Es weist die Parameterwerte
A = 7300000m
2
=7.3km
2
,T= 900 s,k
d
=1
auf. Wasserstand h und Pumpvolumenstrom q
P
sind durch
−0.55 m ≤ h ≤−0.30 m
und
0m
3
s
−1
≤ q
P
≤ 75 m
3
s
−1
begrenzt. Der Sollwert des Wasserstandes h betr
¨
agt h
soll
= −0.40 m. Der
Wasserstand h der Kan
¨
ale wird bez
¨
uglich des Meeresspiegels angegeben, d. h.,
im Fall h = 0 entspricht der Wasserstand der Kan
¨
ale dem Meeresspiegel. Er
liegt im Delfland ungef
¨
ahr einen halben Meter unter dem Meeresspiegel.
Die Zustandsgr
¨
oßen des Systems aus Gl. (5.18) sind die Wasserstandsh
¨
ohe
x
1
(k)=h(k) und die um einen Zeitschritt k
d
=1verz
¨
ogerte Stellgr
¨
oße
x
2
(k)=q
P
(k − 1). Mit obigen Parameterwerten und der aktuellen Stellgr
¨
oße
u(k)=q
P
(k) erhalten wir aus Gl. (5.18) als Modell
x
1
(k +1)=x
1
(k) − 1.23 · 10
−4
x
2
(k)+1.23 ·10
−4
q
Re
(k),
x
2
(k +1)=u(k),
y(k)=x
1
(k).
Dabei wirkt q
Re
als St
¨
orung.
Ziel einer Regelung ist es nun, St
¨
orungen q
Re
aufgrund starken Nieder-
schlages so auszuregeln, dass der Wasserstand x
1
unter Einhaltung der Be-
schr
¨
ankungen −0.55 ≤ x
1
≤−0.30 auf den Sollwert x
1
= −0.4gef
¨
uhrt wird.
Dabei soll die Stellgr
¨
oße u die Beschr
¨
ankungen 0 ≤ u ≤ 75 nicht verletzen.
Offensichtlich ist obige Regelungsaufgabe gut geeignet f
¨
ur eine modellba-
sierte pr
¨
adiktive Regelung. Denn zum einen steht mit T = 900 s zwischen
zwei Regleraktionen ausreichend Rechenzeit zur Verf
¨
ugung und zum anderen
k
¨
onnen mit einer modellpr
¨
adiktiven Regelung die Beschr
¨
ankungen von y = x
1
und u gut ber
¨
ucksichtigt werden.
F
¨
ur die Auslegung der MPR w
¨
ahlen wir als Pr
¨
adiktionshorizont n
p
=97
und als Stellhorizont n
c
=2.DerlangePr
¨
adiktionshorizont von 24 h und
5.1. Modellbasierte pr
¨
adiktive Regelung 239
-0.3
-0.35
-0.4
80
60
40
20
0
0
0
0
5
5
10
10
15
15
20
20
20
25
25
30
30
35
35
40
40
40
45
45
50
50
60 80 100 120 140 160 180 200
r =0
r =0
r =0.0001
r =0.0001
r =0.000002
r =0.000002
Zeit t in Stunden
Abtastschritt k
Wasserstand y in m
Volumenstrom u in m
3
s
−1
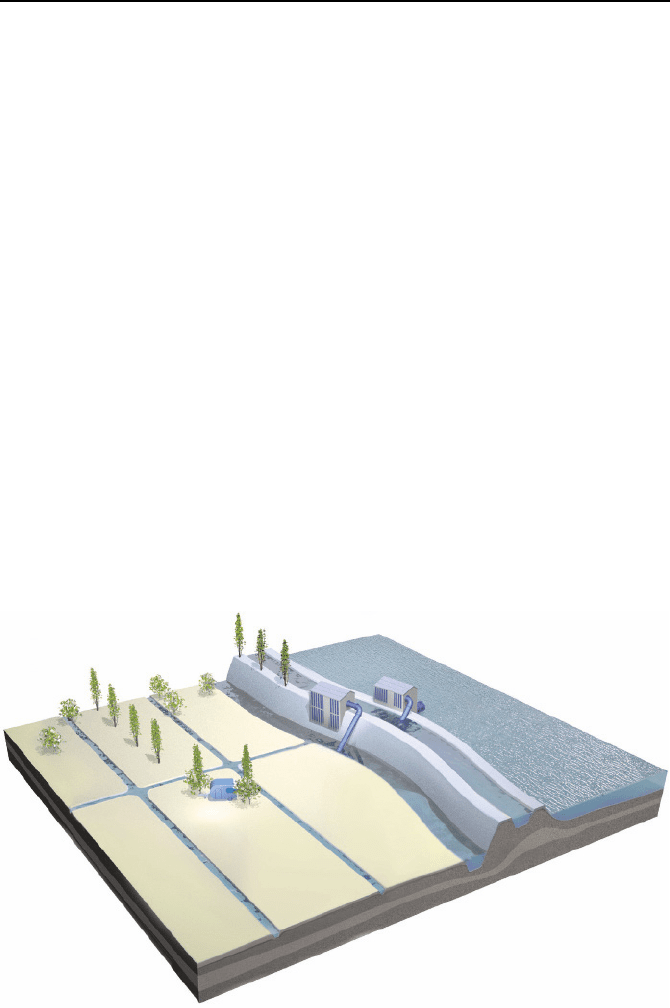
Bild 5.6: Ausgangsverlauf y und Stellgr
¨
oßenverlauf u.
15 min erlaubt u. a. die Einbeziehung einer prognostizierten Regenmenge auf-
grund einer Wettervorhersage. Diese Regenmenge kann
¨
uber q
Re
in der Rege-
lung Ber
¨
ucksichtigung finden.
F
¨
ur das G
¨
utemaß w
¨
ahlen wir
J =(¯y(k +1)− ¯y
R
(k +1))
T
(¯y(k +1)− ¯y
R
(k +1))+rΔ¯u
T
(k)Δ¯u(k),
(5.19)
wobei f
¨
ur den Referenzwert des Wasserstandes y
R
= h
soll
= −0.4 m gilt. D. h.,
es gilt ¯y
R
(i)=[−0.4m − 0.4m ··· −0.4m]
T
f
¨
ur alle i =0, 1,...
Als praktischen Beispielfall betrachten wir einen erh
¨
ohten Wasserstand
von x
1
(0) = − 0.3 m nach einer Schlechtwetterfront. Der zweite Anfangswert
ist x
2
(0) = 0. Bild 5.6 zeigt die Verl
¨
aufe der Stellgr
¨
oße u und des Wasser-
standes y. Dabei sind drei verschiedene Regler verwendet worden, die sich
aus verschiedenen Gewichtungsfaktoren r im G
¨
utemaß (5.19) ergeben. Erwar-
tungsgem
¨
aß ist die MPR f
¨
ur r = 0 am schnellsten und wird f
¨
ur r =0.000002
und r =0.0001 langsamer. Von r h
¨
angt auch die
¨
Anderungsrate der Stellgr
¨
oße
u ab. Spielt ein abruptes Hoch- und Runterfahren des Pumpvolumenstromes u
keine Rolle, so kann r =0gew
¨
ahlt werden. M
¨
ochte man lieber weniger starke
¨
Anderungen Δu im Pumpenvolumenstrom u realisieren, so w
¨
ahlt man einen
gr
¨
oßeren Wert r.Odermanf
¨
uhrt zus
¨
atzlich eine Beschr
¨
ankung von Δu ein.
240 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
1
1
1
1
1
1
5
5
5
5
5
10
10
1
0
10
10
0
20
20
20
30
30
30
40
40
40
50
50
5
60
60
70
8
0
8
0
9
0
0
1
1
1
1
5
5
5
1
0
10
10
20
20
2
0
30
30
30
30
4
0
40
40
0
50
50
50
60
6
70
80
90
90
100
100
11
0
110
12
0
12
0
130
1
40
0
190
200
21
0
220
1
1
1
1
5
5
5
5
10
10
10
10
20
20
2
2
20
30
30
3
40
40
40
5
0
0
50
5
0
6
60
70
0
80
90
00
100
0
11
0
12
150
1
1
1
1
1
1
5
5
5
5
10
10
10
10
20
20
20
20
30
3
30
40
40
50
50
5
0
6
0
60
0
7
0
0
1
00
0
0
8080
8080
4040
4040
00
00
-40-40
-40-40
-80-80
-80-80
8080
8080
4040
4040
00
00
-40-40
-40-40
-80-80
-80-80
Δu
1
Δu
1
Δu
1
Δu
1
Δu
2
Δu
2
Δu
2
Δu
2
Abtastschritt k =1
Abtastschritt k =5
Abtastschritt k = 10 Abtastschritt k =40
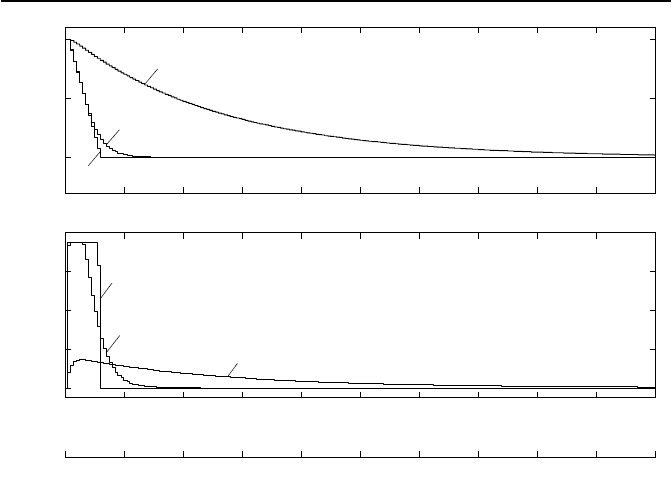
Bild 5.7: Illustration der zu l
¨
osenden Optimierungsprobleme in den Zeitschritten
k =1,k =5,k = 10 und k =40f
¨
ur den Fall r =0.000002. Dargestellt sind die
H
¨
ohenlinien von J und das zul
¨
assige Optimierungsgebiet (blau). Ein Kreuz markiert
das jeweilige Minimum.
In Bild 5.7 ist die w
¨
ahrend der Regelung zu minimierende G
¨
utefunktion
(5.19) dargestellt. Die H
¨
ohenlinien von J haben die Form von sehr langge-
streckten Ellipsen. Dargestellt ist des Weiteren das zul
¨
assige Gebiet f
¨
ur die
Optimierungsvariablen Δu
1
und Δu
2
, wie es sich aus den Beschr
¨
ankungen
ergibt. Die Form der H
¨
ohenlinien der G
¨
utefunktion und das zul
¨
assige Gebiet
h
¨
angen vom Zeitschritt k ab, d. h., sie ver
¨
andern sich w
¨
ahrend eines Ausre-
gelvorganges.
5.1.5 Nichtlineare modellbasierte pr
¨
adiktive Regelung
Bei nichtlinearen Regelstrecken

5.1. Modellbasierte pr
¨
adiktive Regelung 241
˙x = f (x, u),
y = g(x)
(5.20)
oder
x(k +1)=f (x(k), u(k)),
y(k)=g(x(k))
(5.21)
lassen sich MPR
¨
ahnlich anwenden wie bei linearen Regelstrecken. Allerdings
sind Implementierung und Ablauf meistens deutlich komplizierter und auf-
wendiger als im linearen Fall. Dies ist darauf zur
¨
uckzuf
¨
uhren, dass das Op-
timierungsproblem aufgrund der nichtlinearen Systemdynamik (5.21) keine
einfache Form mehr aufweist. Insbesondere ist es im Allgemeinen nicht mehr
konvex. Die Nichtlinearit
¨
at der Systeml
¨
osung von Gl. (5.21) verursacht eine
komplexe Abh
¨
angigkeit des G
¨
utefunktionswertes J von den zu optimierenden
Stellgr
¨
oßenwerten u(k + i). Ein solches nicht konvexes Optimierungsproblem
besitzt oft mehrere lokale Minima und es existieren keine sicher konvergenten
L
¨
osungsverfahren. Das prinzipielle Vorgehen entspricht trotz der komplexeren
Numerik dem Ablauf der LMPR.
Zur L
¨
osung des beschr
¨
ankten Optimierungsproblems verwendet man nu-
merische Optimierungsverfahren [5, 36, 100], wobei eines der Hauptprobleme
oft darin besteht, das Optimierungsproblem in Echtzeit zu l
¨
osen. Als beson-
ders zeitaufwendig stellt sich dabei heraus, dass f
¨
ur jeden Stellgr
¨
oßenverlauf
und jede G
¨
utewertberechnung die L
¨
osung des Systems (5.20) bestimmt wer-
den muss. In der Regel geschieht das im zeitkontinuierlichen Fall (5.20) mittels
eines Integrationsverfahrens, z. B. des Runge-Kutta-Verfahrens. Im Fall dis-
kreter Systeme erfolgt die Berechnung der Systeml
¨
osung unmittelbar
¨
uber die
Rekursionsgleichung (5.21).
Die Echtzeitproblematik hat zur Folge, dass MPR nur bei relativ langsa-
men Regelstrecken, z. B. in der Prozessindustrie, zum Einsatz kommen. Ein
weiteres Problem nichtlinearer MPR, abgek
¨
urzt NMPR, ist die Sicherstellung
der Stabilit
¨
at des Regelkreises. Aufgrund der Nichtlinearit
¨
at der Regelstrecke
und des nicht explizit angebbaren Regelgesetzes kann diese im Allgemeinen
nicht garantiert werden.
Wir betrachten die Stabilit
¨
atsproblematik im Folgenden genauer. Aus-
gangspunkt unserer Betrachtungen ist das System (5.21), wobei der Eingangs-
gr
¨
oßenvektor u gem
¨
aß
u ∈ W ⊂ IR
m
und der Zustandsvektor x gem
¨
aß
x ∈ X ⊂ IR
n
beschr
¨
ankt sind. F
¨
ur die NMPR gelte im Weiteren n
p
= n
c
. Als zu minimie-
rende G
¨
utefunktion setzen wir die Funktion
J(k)=
k+n
c
−1
i=k
Q(x(i), u(i))

242 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
an. Dabei kann die Funktion Q z. B. quadratische Bewertungsterme,
¨
ahnlich
denen in Gl. (5.1), besitzen. In jedem Fall muss Q(x, u) > 0f
¨
ur alle x = 0
und u = 0 gelten. Des Weiteren soll das geregelte System in
x(k)=0
f
¨
ur u(k)=0 eine Ruhelage besitzen und es soll
Q(0, 0)=0
gelten. Aufgrund dieser Forderung gilt insbesondere auch J(k)=0f
¨
ur x(k)=
0 und f
¨
ur u(i)=0,i= k, k +1,...
Wir beachten, dass das G
¨
utemaß J mittelbar nur vom Zustandsvektor x
abh
¨
angt, da der Stellgr
¨
oßenvektor u
¨
uber die NMPR von x abh
¨
angt. Somit
scheint uns die G
¨
utefunktion J eine Kandidatin f
¨
ur eine Ljapunov-Funktion
des pr
¨
adiktiv geregelten Systems zu sein. Denn sie ist im Ursprung x =
0
identisch null und sonst
¨
uberall positiv. Als dritte Bedingung einer Ljapunov-
Funktion (siehe Abschnitt 2.4.4) muss J noch die Forderung
J(k) − J(k − 1) < 0 (5.22)
erf
¨
ullen, d. h., J(k) muss im Verlauf jedes Ausregelvorganges abnehmen.
Die Bedingung (5.22) ist auch erf
¨
ullt, wenn J(k) nur wenig kleiner ist als
J(k − 1). Dann erfolgt die Ausregelung aber sehr langsam. Scokaert, Mayne
und Rawlings [165] versch
¨
arfen die Bedingung (5.22) daher zu
J(k) − J(k − 1) < − μQ(x(k − 1), u(k − 1)), (5.23)
wobei μ ∈ (0, 1) gilt.
F
¨
ur Werte μ nahe null wird die Optimierungsprozedur leichter eine L
¨
osung
u(k),...,u(k + n
c
− 1) finden als f
¨
ur große Werte μ,weilesindiesemFall
mehr L
¨
osungen gibt. Der Preis, der hierf
¨
ur zu zahlen ist, besteht in einer oft
nur geringen Abnahme des G
¨
utewertes J. Folglich ist die Ausregelung dann
wieder langsam.
W
¨
ahlt man μ nahe bei eins, so ist die Abnahme von J von einem Schritt
k −1zumn
¨
achsten gr
¨
oßer. Allerdings ist nun der L
¨
osungsraum st
¨
arker einge-
schr
¨
ankt, so dass die Berechnung einer L
¨
osung komplizierter wird und l
¨
anger
dauern kann.
W
¨
ahrend der Ausf
¨
uhrung der MPR muss st
¨
andig
¨
uberpr
¨
uft werden, ob
die Ungleichung (5.23) eingehalten wird. Sobald die Optimierungsprozedur
eine entsprechende Stellgr
¨
oßenfolge u(k),...,u(k + n
c
−1) gefunden hat, sind
zwei F
¨
alle denkbar. Im ersten steht noch Optimierungszeit zur Verf
¨
ugung.
Sie kann benutzt werden, um das Ergebnis zu verbessern. Im zweiten ist die
zur Verf
¨
ugung stehende Optimierungszeit verbraucht und die Stellgr
¨
oße u(k)
wird auf die Regelstrecke geschaltet. Die Optimierung startet dann erneut
mit
˜
k = k + 1 und sucht eine neue Kombination von Werten u(
˜
k),...,u(
˜
k +
5.1. Modellbasierte pr
¨
adiktive Regelung 243
n
c
− 1). G
¨
unstigerweise benutzt man dabei den alten Satz von Stellgr
¨
oßen
u(k),...,u(k + n
c
− 1) als Startpunkt der Optimierung.
Die G
¨
utefunktion J ist zwar als Ljapunov-Funktion geeignet, jedoch
k
¨
onnen wir ihre Abnahme entlang einer Trajektorie, d. h. die Erf
¨
ullung der
Ungleichung (5.22), nur numerisch w
¨
ahrend eines Ausregelvorganges feststel-
len. Der Stabilit
¨
atssatz von Ljapunov fordert aber f
¨
ur den Nachweis der Sta-
bilit
¨
at die
¨
Uberpr
¨
ufung der Bedingung (5.22) in einer Umgebung U (0)der
Ruhelage x
R
= 0,d.h.f
¨
ur alle x ∈ U(0) \{0} und nicht nur f
¨
ur einzelne
Trajektorien. Da wir die Abnahme von J jedoch nur f
¨
ur einzelne Trajektorien
und nicht in der gesamten Umgebung von x = 0 pr
¨
ufen k
¨
onnen, ist die obige
Vorgehensweise nicht hinreichend f
¨
ur den Stabilit
¨
atsnachweis.
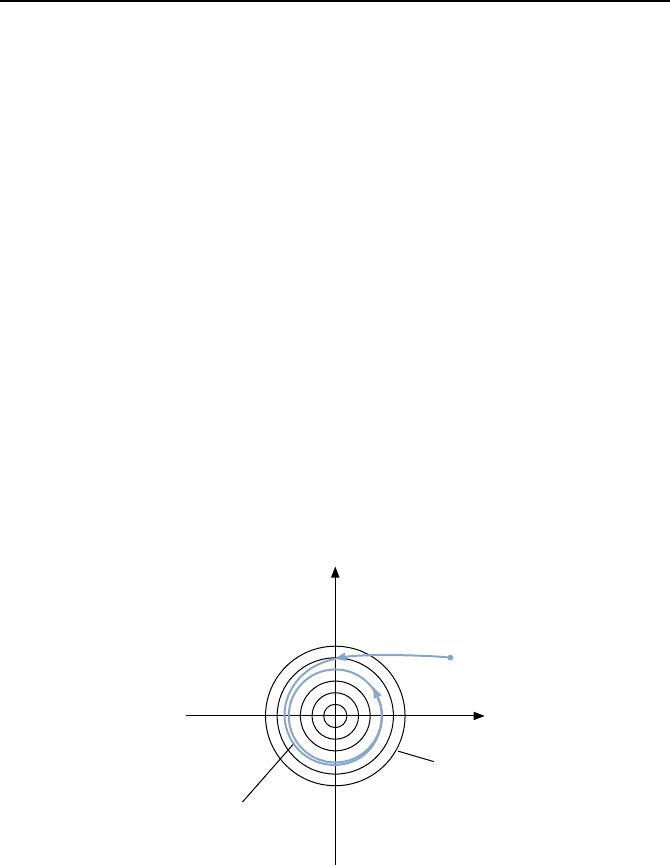
Obige Problematik l
¨
asst sich an einem Gedankenbeispiel veranschaulichen.
Wir betrachten einen nichtlinearen modellpr
¨
adiktiven Regelkreis zweiter Ord-
nung. Er besitzt eine Ruhelage bei x = 0 und einen kreisf
¨
ormigen stabilen
Grenzzyklus mit einem Mittelpunkt bei x = 0. Wir starten den Ausregelvor-
gang mittels des pr
¨
adiktiven Reglers, wie wir ihn oben beschrieben haben, in
einem Punkt x
0
außerhalb des Grenzzyklus. Die Trajektorie x(k)desRegel-
kreises l
¨
auft nun vom Punkt x(0) asymptotisch in den Grenzzyklus hinein.
Dabei nimmt das G
¨
utemaß J best
¨
andig ab, so dass die Ungleichung (5.22)
oder (5.23) erf
¨
ullt ist. Die Trajektorie x(k)l
¨
auft also trotz der Abnahme von
J nicht in die Ruhelage x
R
= 0. Bild 5.8 illustriert diesen Sachverhalt.
x(0)
x
1
x
2
x(k)
Grenzzyklus
Niveaulinie von J
Bild 5.8: Beispiel f
¨
ur die kontinuierliche Abnahme des G
¨
uteintegrals J entlang einer
Trajektorie, ohne dass die Trajektorie x(k) gegen null strebt.
Halten wir als Res
¨
umee fest, dass wir nicht feststellen k
¨
onnen, ob das
G
¨
utemaß J eine Ljapunov-Funktion ist. Die Abnahme von J w
¨
ahrend einer
Ausregelung bildet lediglich eine praxisorientierte Bedingung f
¨
ur die Stabilit
¨
at
des pr
¨
adiktiven Regelungssystems. Um nun sicherstellen zu k
¨
onnen, dass die
Ruhelage x
R
= 0 auch wirklich erreicht wird, d. h. Stabilit
¨
at vorliegt, fordern
244 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
wir zus
¨
atzlich zur Abnahme von J noch
x(k + n
c
)=0 (5.24)
in jedem Zeitschritt k.
Gleichung (5.24) ist eine weitere Nebenbedingung in der Optimierungsauf-
gabe. Um sie zu erf
¨
ullen, muss der Stellhorizont n
c
ausreichend groß sein. Dies
kann sehr große Werte n
c
erfordern, wodurch die Anzahl der zu optimierenden
n
c
Stellgr
¨
oßenwerte u(k),...,u(k + n
c
− 1) ebenfalls sehr groß wird.
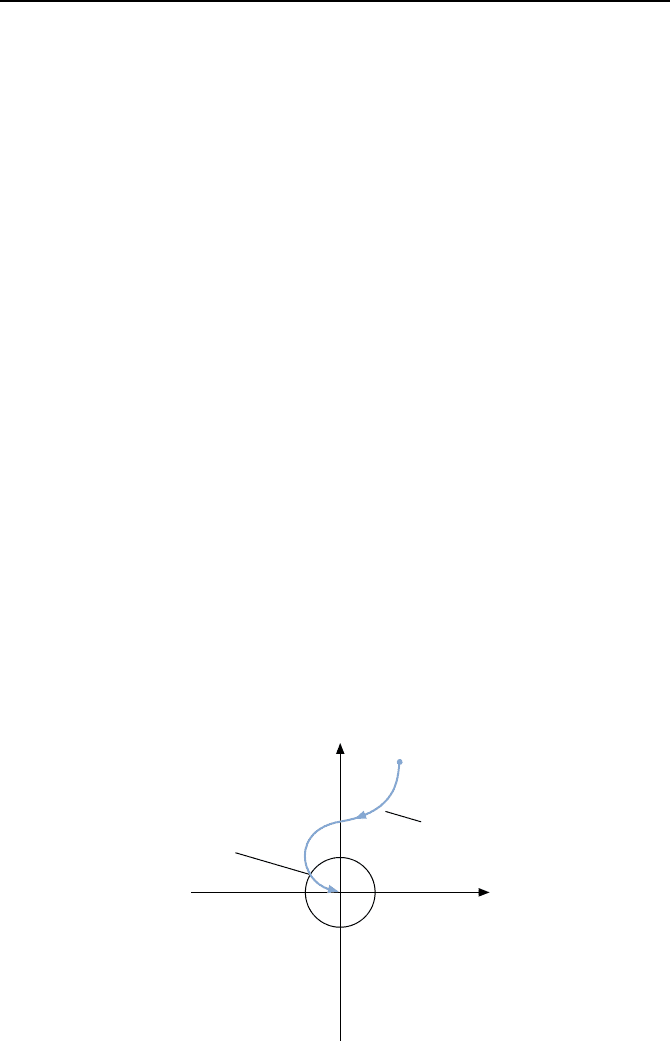
Die letztere Problematik wird abgeschw
¨
acht, wenn man anstelle der Re-
striktion (5.24) fordert, dass
x(k + n
c
) ∈ U (0)
gilt, wobei U(0) eine Umgebung der Ruhelage x
R
= 0 ist. U(0) kann dabei
ein Toleranzgebiet sein, dessen Zustandswerte x ∈ U(0) man als Zielwerte
der Regelung akzeptiert, weil ihre Abweichung von x = 0 hinreichend klein
ist. Die Umgebung U(0) kann aber auch ein Gebiet sein, in dem man anstelle
der pr
¨
adiktiven Regelung u
1
(x) einen anderen Regler u
2
(x) verwendet. In
diesem Fall legt man den Regler u
2
(x)soaus,dasserf
¨
ur alle x ∈ U (0)zueiner
stabilen Ausregelung in die Ruhelage x
R
= 0 f
¨
uhrt. Die Umgebung U (0)wird
dabei als Ljapunov-Gebiet ausgelegt. Keine Trajektorie x(k)verl
¨
asst U(0)
dann wieder. Eine Ausregelung f
¨
ur ein x
0
∈ U (0)beginntmitderpr
¨
adiktiven
Regelung u
1
(x) und schaltet auf den zweiten Regler u
2
(x)um,sobaldx(k) ∈
U(0) gilt. Bild 5.9 illustriert dieses Regelgesetz.
Das Regelgesetz u
2
(x) kann man z. B. linear auslegen, wobei man eine um
x = 0 linearisierte Streckenbeschreibung zugrunde legt. Regelungen dieser Art
mit zwei Regelgesetzen u
1
und u
2
bezeichnet man als Dual-mode-Regler .Obi-
ge
¨
Uberlegungen k
¨
onnen wir in dem von Scokaert, Mayne und Rawlings [165]
x
0
x
1
x
2
u
2
Umschaltung
auf u
2
Pr
¨
adiktive
Regelung u
1
Bild 5.9: Pr
¨
adiktive Dual-mode-Regelung.

5.1. Modellbasierte pr
¨
adiktive Regelung 245
vorgeschlagenen nachfolgenden Dual-mode-MPR-Algorithmus zusammenfas-
sen:
Schritt 1: W
¨
ahle ein μ ∈ (0, 1).
Schritt 2: Sei k =0.Wennx(0) ∈ U (0), dann setze u(0) = u
2
(x(0)).
Andernfalls finde durch Optimierung von J eine Stellgr
¨
oßenfolge
u(0), u(1),...,u(n
c
− 1)
mit einer zugeh
¨
origen Zustandsgr
¨
oßenfolge
x(0), x(1),...,x(n
c
),
so dass
u(i) ∈ W f
¨
ur alle i =0,...,n
c
− 1,
x(i) ∈ X f
¨
ur alle i =0,...,n
c
,
x(n
c
) ∈ U(0)
gilt. Verwende als aktiven Stellgr
¨
oßenwert u(0).
Schritt 3: Sei k =0.Wennx(k) ∈ U(0), dann setze u(k)=u
2
(x(k)).
Andernfalls finde durch Optimierung von J eine Stellgr
¨
oßenfolge
u(k),...,u(k + n
c
− 1)
mit einer zugeh
¨
origen Zustandsgr
¨
oßenfolge
x(k),...,x(k + n
c
),
so dass
u(i) ∈ W f
¨
ur alle i = k,...,k+ n
c
− 1,
x(i) ∈ X f
¨
ur alle i = k,...,k+ n
c
,
x(k + n
c
) ∈ U(0)
und
J(k) − J(k − 1) < −μQ(x(k − 1), u(k − 1))
gilt. Bei der Optimierung von J w
¨
ahlt man die Stellgr
¨
oßenfolge
des vorherigen Schrittes als Startpunkt. Verwende als aktiven Stell-
gr
¨
oßenwert u(k). Wiederhole Schritt 3.
Es soll an dieser Stelle nicht verschwiegen werden, dass Stabilit
¨
atsuntersuch-
ungen bei nichtlinearen MPR in der industriellen Praxis oft vernachl
¨
assigt