J?rgen Adamy - Nichtlineare Regelungen
Подождите немного. Документ загружается.

226 Kapitel 4. Regelungen f
¨
ur nichtlineare Regelstrecken
Somit erh
¨
alt man f
¨
ur das Regelgesetz mit
∂α
2
∂[x
1
x
2
]
T
=
(1 + p)β
(x
1
+ β)
2
0
und
∂V
2
∂[x
1
x
2
]
T
=[x
1
x
2
]
die Gleichung
u = −x
3
+ k
2
x
3
− k
2
(1 + p)x
1
x
1
+ β
+ βx
1
−
p(1 + p)β(x
2
− x
1
)
(x
1
+ β)
2
.
Mit k
2
= 1 gilt schließlich f
¨
ur das Regelgesetz
u = βx
1
−
(1 + p)x
1
x
1
+ β
−
βp(1 + p)(x
2
− x
1
)
(x
1
+ β)
2
.
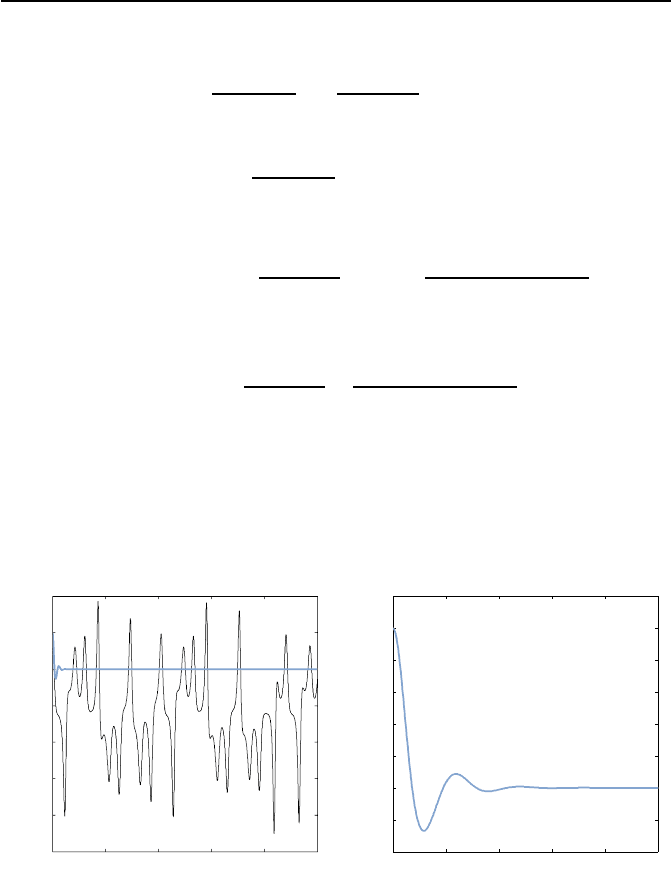
Wir simulieren den ungeregelten Prozess und auch die Regelung f
¨
ur p =10
und β = 6. Die Anfangswerte sind hierbei x
1
=5,x
2
= 5 und x
3
=5.Die
sich ergebenden Verl
¨
aufe f
¨
ur die Str
¨
omungsgeschwindigkeit x
1
zeigt Bild 4.29.
Deutlich erkennbar ist, wie die Regelung das chaotische Verhalten unterdr
¨
uckt
und der Prozess auf den station
¨
aren Wert ausgeregelt wird.
10
-5
-10
-15
-20
-25
00
5
10
15 20 25
6
5
5
4
3
2
1
0
0
-1
-2
0.511.5
2
2.5
Zeit t in min
Zeit t in min
x
1
x
1
Bild 4.29: Verl
¨
aufe der Abweichung x
1
der Str
¨
omungsgeschwindigkeit von der Ruhe-
lage des ungeregelten chaotischen Prozesses (schwarz) und des geregelten Prozesses
(blau). Im rechten Teilbild ist der Ausregelverlauf in vergr
¨
oßertem Maßstab noch-
mals dargestellt.

5
Nichtlineare Regelungen f
¨
ur lineare und
nichtlineare Regelstrecken
5.1 Modellbasierte pr
¨
adiktive Regelung
5.1.1 Grundlagen und Funktionsweise
Modellbasierte pr
¨
adiktive Regelungen (MPR) sind die am h
¨
aufigsten in der
Industrie eingesetzten fortgeschrittenen Regelungsverfahren [29, 78, 125, 155,
156]. In der Prozessindustrie, insbesondere in Raffinerien und der Chemie-
industrie, sind MPR etablierte Standardverfahren. MPR sind nichtlineare
Regelungsverfahren, die universell sowohl f
¨
ur lineare Regelstrecken mit Be-
schr
¨
ankungen von Stell- und Zustandsgr
¨
oßen als auch f
¨
ur nichtlineare Regel-
strecken geeignet sind.
Die Funktionsweise von MPR basiert dabei im Wesentlichen auf den Ei-
genschaften mathematischer Prozessmodelle. Diese haben in der Regelungs-
technik im Allgemeinen zwei Aufgaben. Zum einen soll ein Modell ein tieferes
Verst
¨
andnis des Prozesses und seiner Funktionsweise erm
¨
oglichen. Diese Ei-
genschaft wird zum Beispiel f
¨
ur den Entwurf von Reglern genutzt. Zum an-
deren erlaubt ein Modell die Pr
¨
adiktion zuk
¨
unftigen Verhaltens. Genau diese
M
¨
oglichkeit nutzen modellbasierte pr
¨
adiktive Regelungen, indem sie online
anhand eines Prozessmodells den Ausgangsgr
¨
oßenverlauf mittels des Stell-
gr
¨
oßenverlaufs optimieren. Der optimierte Stellgr
¨
oßenverlauf wird dann zur
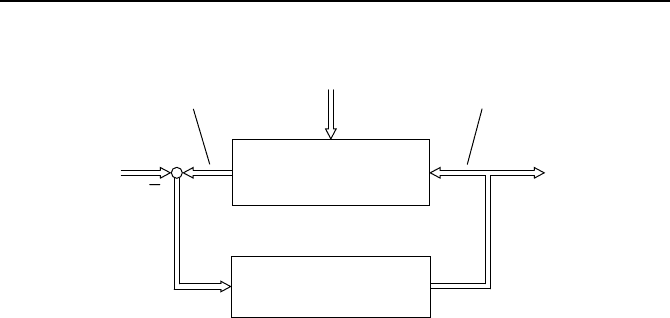
Regelung des eigentlichen Prozesses verwendet. Bild 5.1 illustriert den Vor-
gang.
Sowohl kontinuierliche wie auch diskrete Prozessmodelle k
¨
onnen dabei zum
Einsatz kommen. In der Mehrzahl der F
¨
alle werden allerdings diskrete oder
diskretisierte Modelle
x(k +1)=f (x(k), u(k)),
y(k)=g(x(k), u(k))
verwendet, denn im Fall kontinuierlicher Modelle gestaltet sich die Optimie-
rung des Stellgr
¨
oßenverlaufes deutlich komplexer.
228 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
aktuelle
Zustandsgr
¨
oßen des
Prozesses
pr
¨
adizierter
Ausgangsverlauf
Referenzverlauf
zur Regelstrecke
zuk
¨
unftiger
Stellgr
¨
oßenverlauf
Modell
Optimierer
Bild 5.1: Struktur eines modellbasierten pr
¨
adiktiven Reglers.
Wir gehen aus vom Zeitpunkt k −1 mit bekannter Stellgr
¨
oße u(k −1) und
beginnen ab diesem Zeitpunkt mit der Optimierung. Die Optimierung variiert
den zuk
¨
unftigen Stellgr
¨
oßenverlauf u(k + i) ab dem Zeitpunkt k f
¨
ur eine end-
liche Zahl i =0,...,n
c
−1 von Stellgr
¨
oßenschritten so, dass ein vorgegebenes
G
¨
utemaß J minimal wird. Der Wert n
c
wird Stellhorizont genannt. H
¨
aufig
verwendet wird das
¨
uber n
p
Zeitschritte ermittelte quadratische G
¨
utemaß
J =
n
p
i=1
||Q(y(k + i) − y
R
(k + i))||
2
+ r ·
n
p
i=1
||u(k + i − 1)||
2
(5.1)
mit der positiv definiten Matrix Q, die oft eine Diagonalmatrix ist, oder
J =
n
p
i=1
||Q(y(k + i) − y
R
(k + i))||
2
+ r ·
n
c
i=1
||u(k + i − 1) − u(k + i − 2)||
2
.
(5.2)
Der Wert n
p
heißt Pr
¨
adiktionshorizont,dadaszuk
¨
unftige Verhalten
¨
uber n
p
Zeitschritte vorausberechnet wird. In obigen G
¨
utemaßen wird im ersten Sum-
menterm die Differenz zwischen der Ausgangsgr
¨
oßenfolge y(k + i) und einem
Soll- oder Referenzverlauf y
R
(k+i) bewertet. Im zweiten Summenterm werden
die quadrierten Stellgr
¨
oßen bzw. die Stellgr
¨
oßendifferenzen addiert und mit
dem Faktors r gewichtet. Bei der Minimierung von J sorgt dieser zweite Term
daf
¨
ur, dass die Stellgr
¨
oßen u(k + i) in Gl. (5.1) bzw. Stellgr
¨
oßen
¨
anderungen
in Gl. (5.2) keine zu großen Werte annehmen.
Die Pr
¨
adiktion von y(k + i) erfolgt im G
¨
utemaß J
¨
uber n
p
Zeitschritte,
wobei n
p
≥ n
c
gilt. Der Pr
¨
adiktionshorizont n
p
ist also gr
¨
oßer als der Stellho-
rizont n
c
oder gleich groß. Damit auch f
¨
ur den Zeitbereich i ≥ n
c
Stellgr
¨
oßen
u(k + i) vorliegen, um y(k + i)pr
¨
adizieren zu k
¨
onnen, werden alle Stellgr
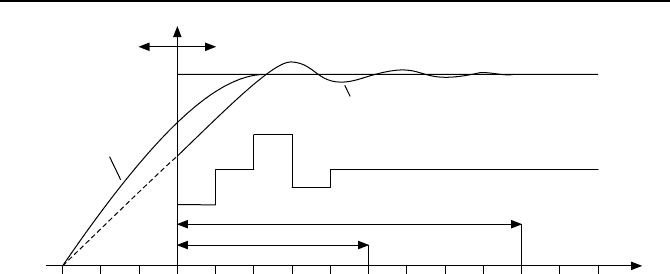
¨
oßen
jenseits des Stellhorizontes auf u(k + n
c
− 1) gesetzt. Bild 5.2 illustriert den
Ablauf.
5.1. Modellbasierte pr
¨
adiktive Regelung 229
Zukunft
Vergangenheit
Pr
¨
adiktion y(k + i)
y,u
Referenz
y
R
(k + i)
Stellhorizont n
c
Pr
¨
adiktionshorizont n
p
u(k + i)
k + n
c
k + n
p
Zeitschritt
k
Bild 5.2: Prinzipieller Ablauf einer modellbasierten pr
¨
adiktiven Regelung (MPR).
Nachdem die Optimierung die Stellgr
¨
oßenfolge u
opt
(k + i)miti =0,...,
n
c
−1 ermittelt hat, wird nur der erste Wert dieser Folge, d. h. u
opt
(k)=u(k),
auf die reale Regelstrecke gegeben. Es wird also nicht die ganze Folge u(k + i)
f
¨
ur die Regelung verwendet, sondern nur ihr erster Wert u(k). Sofort nach der
Aufschaltung von u(k) wird der oben beschriebene Pr
¨
adiktions- und Optimie-
rungsprozess um einen Schritt in die Zukunft verschoben. Daher spricht man
auch von einem gleitenden Horizont. Der gleitende Horizont und die jeweils
nach einem Zeitschritt neu einsetzende Optimierung der Stellfolge u(k + i)
erlaubt eine Reaktion der MPR auf Prozessst
¨
orungen.
Man kann die Funktionsweise der MPR mit der Vorgehensweise eines
Schachspielers vergleichen. Dieser spielt gedanklich verschiedene Zugfolgen
durch, wobei er drei, vier oder mehr Z
¨
uge im Voraus betrachtet. Den ersten
der ihm optimal erscheinenden Kombination spielt er dann in der Realit
¨
at.
Die nach jedem Zeitschritt neu einsetzende Pr
¨
adiktion erfolgt, wie schon
beschrieben, auf Basis des Prozessmodells und der durch die Optimierung
errechneten Stellgr
¨
oßenverl
¨
aufe. Die Stellgr
¨
oßenverl
¨
aufe u(k+i) allein reichen
jedoch f
¨
ur die Pr
¨
adiktion nicht aus. Vielmehr muss auch der Zustand x(k)
zum Beginn des Pr
¨
adiktionszeitraumes bekannt sein. Denn nur auf der Basis
des Zustandes x(k) – sozusagen dem Anfangszustand des Systems f
¨
ur die
Pr
¨
adiktion – und der Stellgr
¨
oßenfolge u(k + i) kann die Ausgangsgr
¨
oßenfolge
y(k + i) und damit das G
¨
utemaß J berechnet werden. Im einfachsten Fall
bestimmt man x(k) durch Messung von x(k −1) und einem Rekursionsschritt
x(k)=f(x(k − 1), u(k − 1)). Ist die Messung nicht m
¨
oglich, so muss x(k)
anhand der historischen Verl
¨
aufe
u(k − 1), u(k − 2),...
und
y(k − 1), y(k − 2),...
durch einen Beobachter gesch
¨
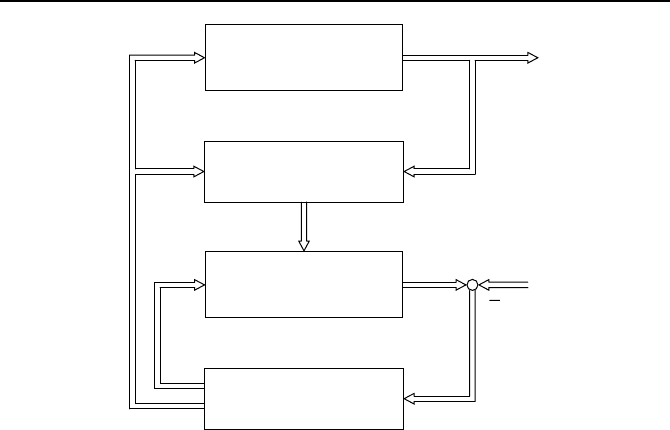
atzt werden. Fasst man alle Elemente einer MPR
zusammen, so ergibt sich der in Bild 5.3 gezeigte Aufbau.
230 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
˜x(k)
y(k)
y
R
(k+i)
y(k+i)
u
opt
(k)
u
opt
(k)
u(k+i)
Prozess
Beobachter
Modell
Optimierer
Bild 5.3: Struktur einer MPR mit Beobachter, Modell und Optimierer.
5.1.2 Lineare modellbasierte pr
¨
adiktive Regelung
Die am h
¨
aufigsten in der industriellen Praxis eingesetzten MPR basieren auf
linearen Prozessmodellen. Solche MPR bezeichnet man als lineare modellba-
sierte pr
¨
adiktive Regelungen,abgek
¨
urzt LMPR.
Verwendet man dabei das quadratische G
¨
utemaß (5.1) oder (5.2), so ergibt
sich ein linearer Regler, wie wir im Folgenden sehen werden. Lineare Regler
k
¨
onnen bekanntlich auch mit anderen, einfacheren Verfahren entworfen wer-
den. Der wahre Nutzen einer LMPR ergibt sich daher auch erst dann, wenn
man Nebenbedingungen in das Optimierungsproblem miteinbeziehen muss.
Dies k
¨
onnen z. B. Stell-, Ausgangs- oder Zustandsgr
¨
oßenbeschr
¨
ankungen sein.
In diesem Fall ergibt sich ein nichtlinearer Regler. Die MPR wird allerdings
aufgrund des linearen Prozessmodells trotzdem als LMPR bezeichnet.
Wir betrachten den Fall einer linearen zeitdiskreten Regelstrecke
x(k +1)=Ax(k)+Bu(k),
y(k)=Cx(k)
(5.3)
mit x ∈ IR
n
, u ∈ IR
m
und y ∈ IR
r
.Vorerstber
¨
ucksichtigen wir hierbei keine
Beschr
¨
ankungen von u, x oder y d. h., wir betrachten nur den rein linearen
Fall. Sp
¨
ater werden wir sehen, dass wir die hierbei erzielten Ergebnisse auch
f
¨
ur den Fall mit Beschr
¨
ankungen nutzen k
¨
onnen. Die Betrachtung des rein
linearen Sonderfalls erm
¨
oglicht uns im Besonderen einen einfachen Zugang
zum detaillierten Verst
¨
andnis modellbasierter pr
¨
adiktiver Regelungen.
,

5.1. Modellbasierte pr
¨
adiktive Regelung 231
Der Stellgr
¨
oßenvektor u(k) wird nun aus der vorherigen Stellgr
¨
oße u(k−1)
und die im Schritt k stattfindende sprungf
¨
ormige Ver
¨
anderung Δu(k)gem
¨
aß
u(k)=u(k − 1) + Δu(k) (5.4)
zusammengesetzt. Man erh
¨
alt so f
¨
ur die obige Systembeschreibung (5.3)
x(k +1)=Ax(k)+Bu(k − 1) + BΔu(k),
y(k)=Cx(k).
(5.5)
Wir betrachten im Weiteren alle Ausgangsvektoren y(k +i) beginnend mit
Schritt k + 1 bis zum Schritt k + n
p
,d.h.biszumPr
¨
adiktionshorizont n
p
.
Wir erhalten aus Gl. (5.4) und Gl. (5.5) zuerst f
¨
ur i ≤ n
c
die Beziehungen
y(k +1)=CAx(k)+CBu(k − 1) + CBΔu(k),
y(k +2)=CA
2
x(k)+C(A + I)Bu(k − 1) + C(A + I)BΔu(k)
+ CBΔu(k +1),
.
.
. (5.6)
y(k + i)=CA
i
x(k)+C
A
i−1
+ ...+ A + I
Bu(k − 1)
+
i
j=1
C
A
i−j
+ ...+ A + I
BΔu(k + j − 1),
.
.
.
y(k + n
c
)=CA
n
c
x(k)+C
A
n
c
−1
+ ...+ A + I
Bu(k − 1)
+
n
c
j=1
C
A
n
c
−j
+ ...+ A + I
BΔu(k + j − 1).
Obige Gleichungen beschreiben die Ausgangsgr
¨
oßen bis zum Stellhorizont n
c
.
Hinter dem Stellhorizont i>n
c
¨
andert sich die Stellgr
¨
oße nicht mehr, d. h.
Δu(k + i − 1) = 0 f
¨
ur i>n
c
. Dann gilt
y(k + n
c
+1)=CA
n
c
+1
x(k)+C (A
n
c
+ ...+ A + I) Bu(k − 1)
+
n
c
j=1
C
A
n
c
+1−j
+ ...+ A + I
BΔu(k + j − 1),
.
.
. (5.7)
y(k + n
p
)=CA
n
p
x(k)+C
A
n
p
−1
+ ...+ A + I
Bu(k − 1)
+
n
c
j=1
C
A
n
p
−j
+ ...+ A + I
BΔu(k + j − 1).
Man fasst die Vektoren y(k +1) bisy(k + n
p
)imrn
p
× 1-Vektor

232 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
¯y(k +1)=
⎡
⎢
⎢
⎢
⎣
y(k +1)
y(k +2)
.
.
.
y(k + n
p
)
⎤
⎥
⎥
⎥
⎦
und die Stellgr
¨
oßen
¨
anderungen Δu(k)bisΔu(k +n
c
−1) im mn
c
×1-Vektor
Δ¯u(k)=
⎡
⎢
⎢
⎢
⎣
Δu(k)
Δu(k +1)
.
.
.
Δu(k + n
c
− 1)
⎤
⎥
⎥
⎥
⎦
zusammen. Man beachte, dass der Vektor Δ¯u(k) im Allgemeinen eine niedri-
gere Dimension als der Vektor ¯y(k + 1) besitzt, da n
c
≤ n
p
gilt.
F
¨
ur die Gl. (5.6) und Gl. (5.7) erh
¨
alt man zusammen
¯y(k +1)=Fx(k)+Gu(k − 1) + HΔ¯u(k), (5.8)
wobei
F =
⎡
⎢
⎢
⎢
⎢
⎢
⎣
CA
CA
2
CA
3
.
.
.
CA
n
p
⎤
⎥
⎥
⎥
⎥
⎥
⎦
, G=
⎡
⎢
⎢
⎢
⎢
⎢
⎣
CB
C(A + I)B
C(A
2
+ A + I)B
.
.
.
C(A
n
p
−1
+ ...+ I)B
⎤
⎥
⎥
⎥
⎥
⎥
⎦
,
H=
⎡
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
CB 0 ... 0
C(A + I)BCB··· 0
C(A
2
+ A + I)BC(A + I)B ··· 0
.
.
.
.
.
.
.
.
.
.
.
.
C(A
n
c
−1
+...+I)BC(A
n
c
−2
+...+I)B ··· CB
C(A
n
c
+...+I)BC(A
n
c
−1
+...+I)B ··· C(A + I)B
.
.
.
.
.
.
.
.
.
.
.
.
C(A
n
p
−1
+...+I)BC(A
n
p
−2
+...+I)B ··· C(A
n
p
−n
c
+...+I)B
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
mit F ∈ IR
rn
p
×n
, G ∈ IR
rn
p
×m
und H ∈ IR
rn
p
×mn
c
gilt. Dabei ist der Anteil
g(k)=Fx(k)+Gu(k − 1)
in Gleichung (5.8) durch die schon erfolgten Schritte 0,...,k−1 der Regelung
vorgegeben. W
¨
ahrend der Term g(k) also konstant ist, enth
¨
alt der Anteil
HΔ¯u(k) in Gl. (5.8) die zu optimierende Stellgr
¨
oßenfolge Δu(k),...,Δu(k +
n
c
− 1). Man verk
¨
urzt Gl. (5.8) daher zu

5.1. Modellbasierte pr
¨
adiktive Regelung 233
¯y(k +1)=g(k)+HΔ¯u(k). (5.9)
Minimiert werden soll nun das konvexe G
¨
utemaß
J(Δ¯u(k)) = (¯y(k +1)− ¯y
R
(k +1))
T
Q (¯y(k +1)− ¯y
R
(k +1))
+ Δ¯u
T
(k)RΔ¯u(k),
(5.10)
wobei Q eine positiv definite rn
p
×rn
p
- Matrix und R eine positiv definite
mn
c
×mn
c
-Matrixist.Derrn
p
- dimensionale Vektor
¯y
R
(k +1)=
⎡
⎢
⎢
⎢
⎣
y
R
(k +1)
y
R
(k +2)
.
.
.
y
R
(k + n
p
)
⎤
⎥
⎥
⎥
⎦
beinhaltet den Verlauf der Referenzgr
¨
oße y
R
(k + i). Man setzt Gl. (5.9) in das
G
¨
utemaß (5.10) ein und erh
¨
alt mit der Abk
¨
urzung
e(k)=g(k) − ¯y
R
(k +1)
die Darstellung
J(Δ¯u(k)) = (e(k)+HΔ¯u(k))
T
Q (e(k)+HΔ¯u(k)) + Δ¯u
T
(k)RΔ¯u(k)
= Δ¯u
T
(k)
H
T
QH + R
!
Δ¯u(k)
+2Δ¯u
T
(k)H
T
Qe(k)+e
T
(k)Qe(k). (5.11)
Die Bedingung f
¨
ur ein Minimum dieser konvexen G
¨
utefunktion,
∂J(Δ¯u(k))
∂Δ¯u(k)
= 0,
liefert die lineare Gleichung
H
T
QH + R
!
Δ¯u(k)+H
T
Qe(k)=0.
Hieraus ergeben sich die gesuchten Stellgr
¨
oßen zu
Δ¯u(k)=−
H
T
QH + R
!
−1
H
T
Qe(k).
Von den im Vektor
Δ¯u(k)=
⎡
⎢
⎢
⎢
⎣
Δu(k)
Δu(k +1)
.
.
.
Δu(k + n
c
− 1)
⎤
⎥
⎥
⎥
⎦
234 Kapitel 5. Regelungen f
¨
ur lineare und nichtlineare Regelstrecken
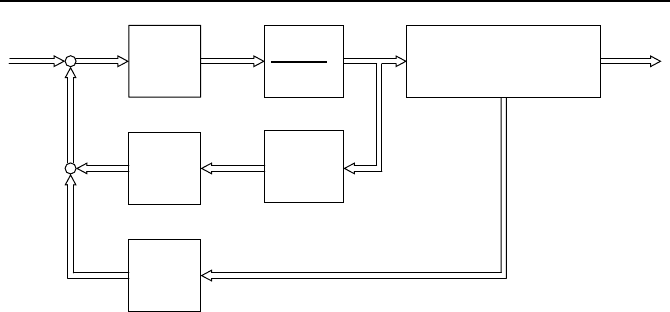
−K
G
F
1
1−z
−1
I
z
−1
I
x(k+1)=Ax(k)+Bu(k)
y(k)=Cx(k)
−¯y
R
(k+1)
e(k)
Δu(k)
u(k)
y(k)
u(k−1)
x(k)
Bild 5.4: MPR f
¨
ur eine lineare Regelstrecke ohne Beschr
¨
ankungen.
zusammengefassten Stellgr
¨
oßen wird allerdings, wie bereits erw
¨
ahnt, nur der
erste Stellgr
¨
oßenschritt Δu(k) zur Regelung genutzt. Wir betrachten daher
nur das erste Element
Δu(k)=−Ke(k)
dieses Vektors mit
K =
I 0 ···0
H
T
QH + R
!
−1
H
T
Q
,
wobei I ∈ IR
m×m
ist. Das Regelgesetz ist linear, besitzt eine Dynamik und
lautet zusammengefasst
u(k)=u(k − 1) + Δu(k)=u(k − 1) − Ke(k),
e(k)=Fx(k)+Gu(k − 1) − ¯y
R
(k +1).
Bild 5.4 zeigt die zugeh
¨
orige Struktur der linearen MPR ohne Beschr
¨
an-
kungen. Auf einen Beobachter wurde dabei verzichtet. Ein solcher kann aber
ohne Weiteres zur Bestimmung des zur Regelung n
¨
otigen Zustandsvektors
x(k) in den Regelkreis eingef
¨
ugt werden.
5.1.3 LMPR mit Beschr
¨
ankungen
Wie schon erw
¨
ahnt, hat die lineare MPR ohne Beschr
¨
ankungen keine große
praktische Relevanz und wurde hier vor allem beschrieben, um einen einfach
verst
¨
andlichen Zugang zur Thematik zu finden und die prinzipielle Funktions-
weise zu erl
¨
autern.
In der industriellen Praxis findet die lineare MPR Verwendung, wenn
die zu optimierenden Variablen beispielsweise im Stellgr
¨
oßenvektor u(k)Be-
schr
¨
ankungen
5.1. Modellbasierte pr
¨
adiktive Regelung 235
⎡
⎢
⎢
⎢
⎣
u
min,1
u
min,2
.
.
.
u
min,m
⎤
⎥
⎥
⎥
⎦
u
min
≤
⎡
⎢
⎢
⎢
⎣
u
1
(k)
u
2
(k)
.
.
.
u
m
(k)
⎤
⎥
⎥
⎥
⎦
u(k)
≤
⎡
⎢
⎢
⎢
⎣
u
max,1
u
max,2
.
.
.
u
max,m
⎤
⎥
⎥
⎥
⎦
u
max
unterliegen. Diese Beschr
¨
ankungen der Stellgr
¨
oßen lassen sich auch in Abh
¨
an-
gigkeit der Stellgr
¨
oßen
¨
anderungen darstellen. So schreibt man
u
min
≤ u(k)=u(k − 1) + Δu(k) ≤ u
max,
u
min
≤ u(k +1) =u(k − 1) + Δu(k)+ Δu(k +1) ≤ u
max,
u
min
≤ u(k +2) =u(k − 1) + Δu(k)+ Δu(k +1)+Δu(k +2)≤ u
max,
.
.
.
u
min
≤ u(k + n
c
− 1) =u(k − 1) +Δu(k)+ ... + Δu(k + n
c
− 1) ≤ u
max
.
(5.12)
Wir definieren ¯u
min
=
u
T
min
... u
T
min
T
und ¯u
max
=
u
T
max
... u
T
max
T
als
Vektoren der L
¨
ange mn
c
. Gl. (5.12) l
¨
asst sich dann in der Matrixform
¯u
min
≤ E · u(k − 1) + D · Δ¯u(k) ≤ ¯u
max
(5.13)
mit der mn
c
× m -Matrix
E =
⎡
⎢
⎢
⎢
⎣
I
I
.
.
.
I
⎤
⎥
⎥
⎥
⎦
und der unteren mn
c
× mn
c
- Dreiecksmatrix
D =
⎡
⎢
⎢
⎢
⎣
I 00··· 0
II0 ··· 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
III··· I
⎤
⎥
⎥
⎥
⎦
darstellen. Die Matrizen I sind Einheitsmatrizen der Dimension m × m.
Von Bedeutung sind des Weiteren Beschr
¨
ankungen der
¨
Anderungsrate der
Stellgr
¨
oßen, d. h. Beschr
¨
ankungen der Art
Δ¯u
min
≤ Δ
¯
u(k) ≤ Δ¯u
max
. (5.14)
Die Vektoren Δ¯u
min
und Δ¯u
max
sind
¨
ahnlich aufgebaut wie die Vektoren ¯u
min
und ¯u
max
und besitzen auch deren Dimension.
Außer Stellgr
¨
oßen k
¨
onnen auch Zustandsgr
¨
oßen x
i
oder Ausgangsgr
¨
oßen
y
i
Beschr
¨
ankungen