Jean-Laurent Mallet. Geomodeling
Подождите немного. Документ загружается.

258
CHAPTER
6.
PIECEWISE LINEAR TRIANGULATED SURFACES
where
a
c
is a
normalizing factor chosen
so
that
|
A
c
\\
—
I:
When added
to the set of
constraints
C
v
of the
discrete model
.M
(Q,
TV,
</?,
C<p),
the
constraint (6.33) induces terms
7
c
(oO
and
T
c
(a\(p)
in the
local
form of the
DSI
equation.
For
example,
at
node
cto,
these terms take
the
following
form:
Specifying
the
gradient
of a
property
Let
(U, V) and GT be the
frame
and the
metric tensor
as
denned
by
equations
(6.15)
and
(6.11), respectively,
and
associated with
a
barycentric parameter-
ization
of a
triangle
T =
T(x(cno),x(a:i),x(a2)).
According
to
(5.16),
and
(5.17),
any
vector
W
belonging
to the
plane
of the
triangle
T can be
decom-
posed
as
follows:
According
to
equation
(6.19),
we
have
If
it is
necessary
to
constrain
grad(/?T
to be
equal
to W on T,
then this
is
equivalent
to
saying
that
the two
following
constraints
c
u
—
c
u
(W,T)
and
c
v
=
c
«(\v,T)
must
be
honored:
Using
the
coefficients
[A
c
u(a)},
6
C
«,
{A
c
v(a}},
and
b
c
v
defined
as
it is
easy
to
check
that
the two
linear constraints
(6.34)-c
u
and
(6.34)-c'
u
can
be
turned into
the
following
pair
of
normalized
DSI
constraints:
According
to
section
(4.4.2),
when added
to the set of
constraints
C^
of the
discrete model
M.
l
(£l,
N,
v
7
)^),
the
above
two DSI
constraints induce pairs
6.2.
BASIC
DSI
CONSTRAINTS
of
terms
{7^
(a),
r^(a|<^)}
and
{7^(0),!^
(a
(/?)}
in the
local
form
of the
DSI
equation.
For
example,
at
node
CMQ,
these
terms
take
the
following
form:
It can be
observed
that
c
u
and
c
v
depend
on T.
Consequently,
if
several
triangles surrounding
the
node
o?o
hold similar gradient constraints
c
u
and
c
v
.
then each
of
these triangles
will
generate
two
pairs
of
terms similar
to
those
denned
by
equations (6.35).
Specifying
the
direction
of the
gradient
of a
property
Similarly
to the
previous section, consider
the
frame
(U, V) and the
metric
tensor
GT as
defined
by
equations
(6.15),
and
(6.11), respectively,
and as-
sociated with
a
barycentric parameterization
of T =
T(x(o:o),x(a!i),x(a2)).
According
to
equations (5.16),
and
(5.17),
any
vector
W
belonging
to the
plane
of the
triangle
T can be
decomposed
as
follows:
Similarly,
according
to
equation
(6.19),
we
have
As
a
consequence,
we can
write
If
it is
necessary
to
specify
that
grader
must
be
orthogonal
to W on
T,
then
we
must have
W •
grad(£y
=
0.
According
to
equation
(6.36),
this
is
equivalent
to
saying
that
the
following linear
constraint
c =
c(W,
T)
must
be
honored:
Let
a
c
be a
normalizing factor
denned
as
follows
and let
(A
c
(a)}
and
b
c
be the
coefficients
such
that
otherwise
259
260
CHAPTER
6.
PIECEWISE LINEAR TRIANGULATED
SURFACES
Using
these
coefficients,
it is
clear
that
the
linear constraint
(6.37)
can be
turned into
the
following
normalized
DSI
constraint:
According
to
section
(4.4.2),
when added
to the set of
constraints
C^
of the
discrete model
Ai
1
(0,
A
7
",
t/?,C^),
the
above
DSI
constraint induces
a
pair
of
terms
{7^(a),r^(a|v?)}
in the
local
form
of the DSI
equation.
For
example,
at
node
ao,
these terms take
the
following
form:
It can be
observed
that
c
depends
on T.
Consequently,
if
several triangles
surrounding
the
node
a
0
hold constraints similar
to c,
then each
of
these
triangles
will
generate
a
pair
of
terms similar
to
those
defined
by
equations
(6.38).
Specifying
the
module
of the
gradient
of a
property
For
simplicity's sake, assuming
that
a
barycentric parameterization
of the
triangle
T is
used,
let us
consider
the
associated linear interpolation
(p
T
of
a
property
</?.
In
this case, according
to
equation
(6.19),
the
square
of the
module
of
grad^y
can be
written
as
For the
sake
of
simplicity,
in the
rest
of
this section
the
components
8
of
G^
1
will
be
noted
as
follows:
If
it is
necessary
to
specify
that
|
grader
I
must
be
equal
to a
given constant
grad
on T,
then
it
suffices
to
introduce
a DSI
constraint
c, as
defined
by
It can be
observed
that
the
constraint
c =
c(grad,
T) so
defined
depends both
on
grad
and T.
This constraint
is
clearly nonlinear
and
must
be
linearized
in the
neighborhood
of the
current solution
(f>
0
id-
For
this purpose, according
to
section
(4.4.5),
it is
necessary
to
compute
the
derivatives
of
F
c
((p)
relative
to the
components
</?(ao),
^(0:1),
and
^(0:2)
of
ip
associated
with
the
vertices
8
Note
that
g
uv
=
g
vu
.
6.2.
BASIC
DSI
CONSTRAINTS
1
of
the
triangle
T.
These derivatives
can
easily
be
computed
from
equations
(6.39),
and
(6.40):
If
\\F'
C
\\
2
and
Ac(<Xi\<Poid)
are
defined
as
then, according
to
equation
(4.56),
for any
o^
such
that
F'
c
(oti)
7^
0, the
above
constraint
(6.41)
introduces
the
following
terms
7^(a)
and
T
v
c
(a
(p)
in the
local
form
of the DSI
equation:
Specifying
a
constant gradient
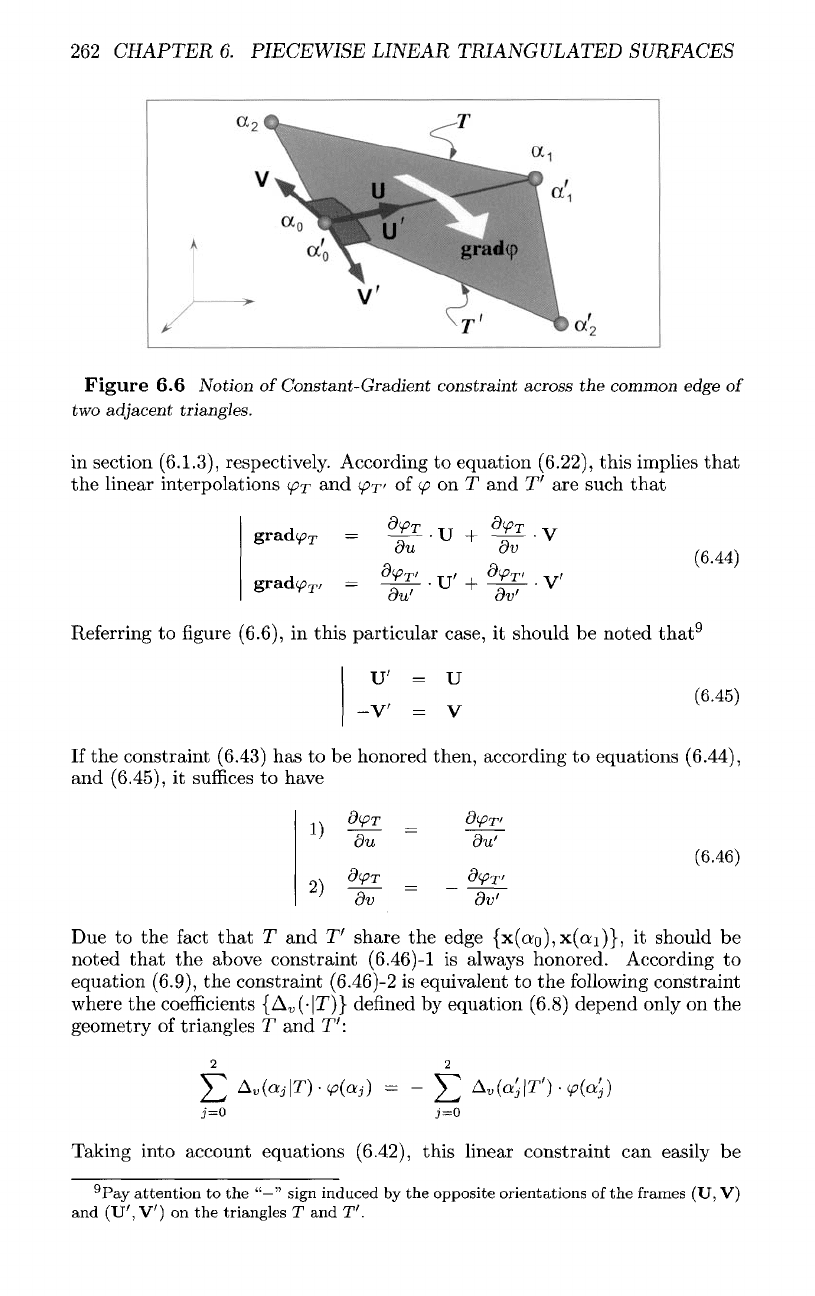
Referring
to
figure
(6.6),
let us
consider
two
adjacent triangles
T and
T'
sharing
a
common edge
{x(ao),x(ai)}:
We
would
like
to
specify
the
following
constraint:
Due
to the
linear approximation
of
<p
on T and
T'
and to the
fact
that,
most
of
the
time
T and
T'
are not
coplanar, such
a
constraint cannot
be
strictly
honored.
However,
it
will
be
shown below
that
it is
possible
to
specify
this
constraint
as a
soft
constraint
to be
honored
in a
least
square sense
by the
DSI
method.
For
simplicity's sake,
as
suggested
in figure
(6.6),
it is
always possible
to
assume
that
the
twin triangles
T and
T'
have been (virtually)
unfolded
to be
coplanar
and are
represented
by
local
canonic
parameterizations introduced
261
262
CHAPTER
6.
PIECEWISE LINEAR TRIANGULATED SURFACES
Figure
6.6
Notion
of
Constant-Gradient
constraint
across
the
common
edge
of
two
adjacent
triangles.
in
section (6.1.3), respectively. According
to
equation
(6.22),
this implies
that
the
linear interpolations
I^T
and
<PT>
of
(p
on T and
T"
are
such
that
Referring
to figure
(6.6),
in
this particular case,
it
should
be
noted
that
9
If
the
constraint
(6.43)
has to be
honored then, according
to
equations (6.44),
and
(6.45),
it
suffices
to
have
Due
to the
fact
that
T and
T'
share
the
edge
{x.(ao),x.(ai)},
it
should
be
noted
that
the
above constraint
(6.46)-l
is
always honored. According
to
equation (6.9),
the
constraint
(6.46)-2
is
equivalent
to the
following
constraint
where
the
coefficients
{A
t)
(-|T)}
defined
by
equation (6.8) depend only
on the
geometry
of
triangles
T and
T':
Taking into account equations
(6.42),
this linear constraint
can
easily
be
9
Pay
attention
to the
"—"
sign induced
by the
opposite
orientations
of the
frames
(U, V)
and
(U',
V')
on the
triangles
T and
T".
6.2.
BASIC
DSI
CONSTRAINTS
turned into
a
normalized
DSI
constraint
c =
c(T,
T")
defined
by
where
the
coefficient
a
c
is
a
normalizing
factor
chosen
as
follows
to
have
I
A
C\\
= 1:
When added
to the set of
constraints
C^
of the
discrete model
.M
1
^,
N,
</?,
C^),
the
constraint (6.43) induces
a
pairs
of
terms
7
c
(o;)
and
T
c
(a\(p)
in the
local
form
of the DSI
equation.
For
example,
at
node
ao,
these terms take
the
following
form:
6.2.2
Specifying
the
geometry
Fuzzy
Control-Point
As
suggested
in figure
(4.7),
let IP be a
point located
in the
neighborhood
of
a
triangulated
surface
T(S}
and
projected,
in a
given direction
D, at
point
p
on
a
triangle
T =
T(x(ao),x(a;i),x(a;2))
of
T(S}.
The
point
IP is
assumed
to
behave
like
a
magnet, attracting
T in the
direction
D to
have
IP
coinci-
dent with
its
projection
p. In
other words,
if
(u,
v) are the
local parametric
coordinates
of p on T,
then
x^(w,
v)
should
be
identical
to IP:
Such
a
constraint, called
a
"fuzzy
Control-Point,"
has
already been presented
in
section
(4.7).
If
(u,v)
corresponds
to a
local barycentric parameterization
of
T,
then, according
to
equation
(4.67),
the
above constraint
(6.47)
generates
the
following
terms
7^
(oti)
and
T
v
c
(on
x) in the
local
form
of the DSI
equation
at the
vertices
(a
0
,
QI,
0:2)
of T:
263
264
CHAPTER
6.
PIECE
WISE LINEAR TRIANGULATED SURFACES
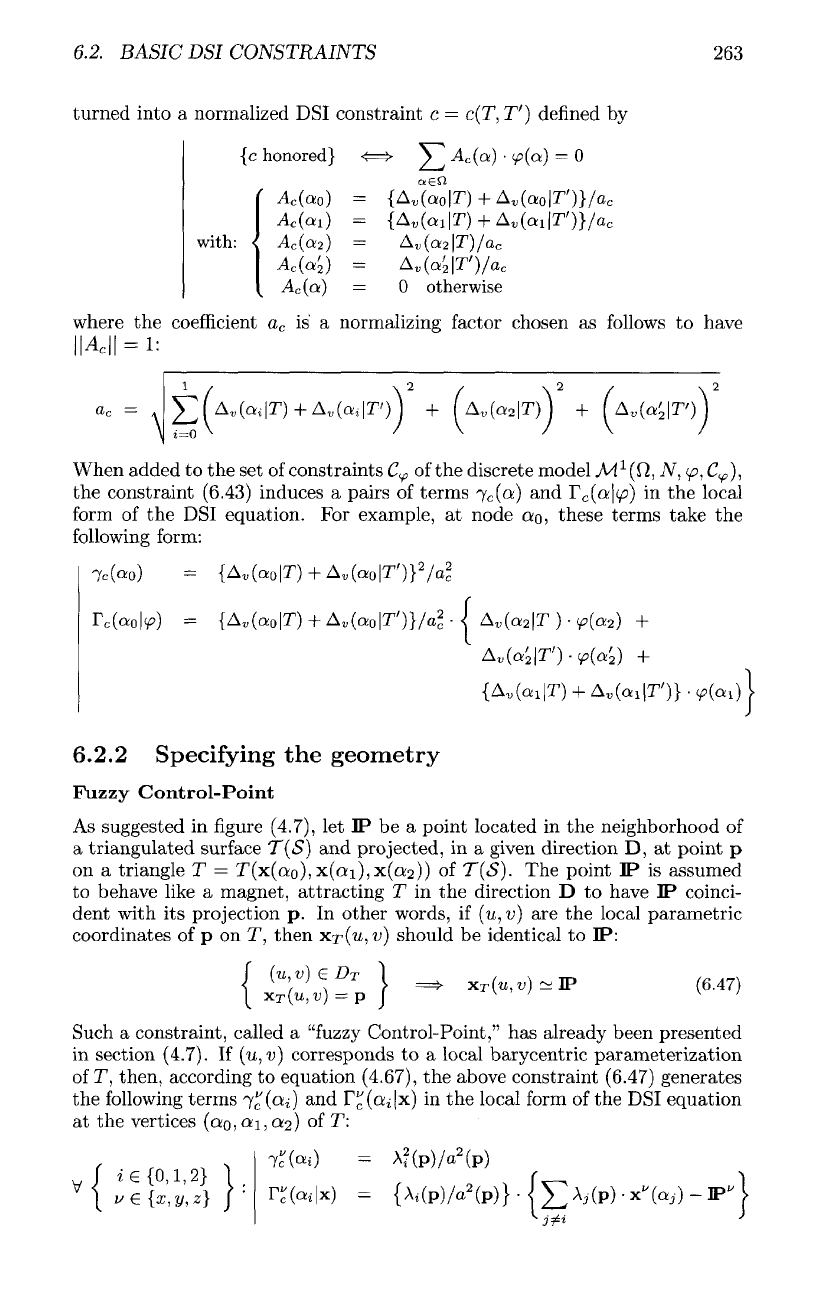
Figure
6.7
Notion
of
fuzzy
Control-Line:
the
nodes
of
the
polygonal
curve
attract
the
surface
according
to
given
directions
interpolated
along
the
curve.
The
shape
of
the
curve
and the
directions
of
attraction
are
themselves
smoothly
interpolated
using
the
DSI
method.
In
this
definition
of
7^(0^)
and
r^o^x),
the
coefficients
Aj(p)
are
assumed
to
be
the
barycentric
coordinates
of p
relative
to the
vertices
x(oij)
of T,
while
a
2
(p)
is a
normalizing
factor:
From
a
mathematical point
of
view,
it
should
be
noted
that
the
notion
of
"fuzzy
Control-Point"
is
almost identical
to the
notion
of
"fuzzy
Control-
Property." However,
from
a
practical point
of
view,
there
is a
major
difference:
if
the
iterative version
of DSI is
used, then
the
projection
p of IP on
T(«S)
changes
at
each step
of the
iterative process
and the
associated
fuzzy
Control-
Point
has to be
updated.
In
other words,
fuzzy
Control-Points have
to be
implemented
as
dynamic constraints (see section
(4.4.4)).
In
figure
(1.11),
one
can see an
example showing
the
effect
of
fuzzy
Control-Points
in the
modeling
of a
salt dome.
The
notion
of
fuzzy
Control-Point
can
easily
be
adapted
for
defining
the
notion
of
"fuzzy
Control-Line" consisting
of a
polygonal curve
JC
all of
whose
nodes
behave like small magnets attracting
the
surface
T(«S).
In
this case,
the
associated
attraction
directions appear
as
instances
of a
vectorial property
D
attached
to the
nodes
of
C.
As
suggested
in figure
(6.7),
it may be
convenient
to
interpolate
these
directions
of
attraction
smoothly along
£
thanks
to the
DSI
method (see page 167).
Control-Straightline
constraint
By
definition,
a DSI
constraint
specifying
that
a
given node
a of a
triangulated
surface
T(<5)
can
move only
on a
straight
line passing
by the
current position
X(Q:)
of
this node
and
parallel
to a
given vector
d(a)
attached
to
this node
is
called
a
Control-Straightline constraint.
6.2.
BASIC
DSI
CONSTRAINTS
In
practice,
such
a
constraint
is
implemented
as a
hard
DSI
constraint
(see
section
(4.5))
where,
at
each
step
of the
iterative
process,
the
location
x(cc)
of
the
node
a is
replaced
by its
projection
on the
straight
line
passing
through
the old
position
x
0
id(a)
and
colinear
to
d(a):
There
are two
main
applications
of
this
constraint:
• If, in a
stratified media,
a
triangulated
surface
T(S]
constrained
to be
more
or
less
parallel
to a
given surface
SQ
,
while honoring
a set of
constraints
different
from
those
applied
to
T(«So),
must
be
built, then proceed
as
follows:
—
First,
T(«S)
has to be
built
as a
copy
of
T(«So).
—
Next,
a
displacement direction
d(a)
equal
to the
unit normal vector
to
T(So)
has to be
installed
at
each node
of
T(S}.
—
Finally,
for
each node
a of
T(«S),
a
Control-Straightline constraint asso-
ciated with
the
directions
d(a)
denned
above
has to be
installed.
• If a
boundary
of a
triangulated
surface
T(S)
is
required
to
slide along vertical
or
non-vertical walls, then such behavior
can be
specified
as a
series
of
Control-
Straightline constraints applied
to the
nodes
of
this
boundary
and
associated
with
a
constant direction
d(a)
parallel
to the
walls.
Figure
(6.9)
shows
an
example
of
Control-Straightline
constraints
where
the
boundary
of a
triangulated
surface
is
constrained
to
move
only
in the
vertical
direction.
Fuzzy
Control-Normal-Vector
constraint
Let
T(tS)
be a
triangulated
surface
and let
N(p)
be a field of
unit
vectors
given
at any
point
p of the 3D
space.
By
definition,
the DSI
constraint
specifying
that
T(S]
should
be
approximately
orthogonal
to
N(x(a))
in the
neighborhood
of a
given
node
a of
T(S]
is
called
a
"fuzzy
Control-Normal-
Vector"
constraint
10
on
T(S}.
In
practice,
this
is
equivalent
to
saying
that
one
would like
to
have
11
or,
equivalently,
10
Note
that
this constraint specifies
the
slope
of the
surface,
that
is to
say,
its
derivatives,
without specifying
its
location
in the 3D
space.
If the
surface location also needs
to be
specified,
then
it is
necessary
to use a
fuzzy
Control-Point constraint
in
addition.
1:L
Remember
that
AT
0
(a) =
N(a)
—
{a}
represents
the
orbit
of a
(see
figure
(1.3)).
265
266
CHAPTER
6.
PIECE
WISE LINEAR TRIANGULATED
SURFACES
These
constraints
can
easily
be
turned into
two
series
of
normalized
DSI
con-
straints
{C'(Q!,
fc,N)} and
{c"(a:,/c,N)}
corresponding
to the
general canonic
form
as
defined
by
equation (4.3):
and
According
to
equation
(4.49),
for any k 6
N°(a),
each
of the
above constraints
c'
=
C'(Q!,
fc, N) and
c"
=
c"(a,
fc, N)
generate,
at
node
a, the following
terms
7e/(a),
r£,(ai|x),
7e//(a)
an
d
r£/,(o!i|x)
in the
local
form
of the DSI
equation:
and
In
practice, these constraints
can be
gathered into
a
single composite con-
straint
c =
c(a,
N)
generating
the
following
terms
in the
local
form
of the
DSI
equation:
6.2.
BASIC
DSI
CONSTRAINTS
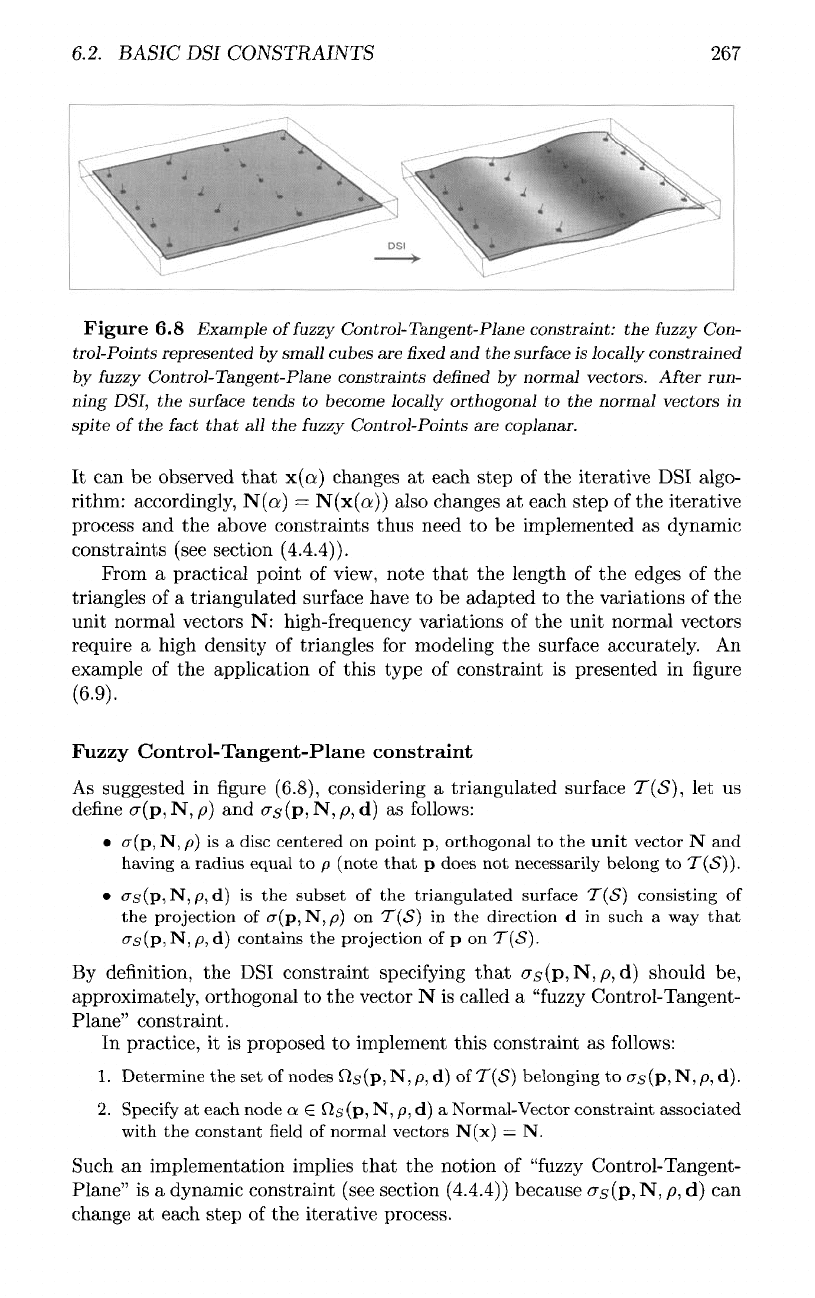
Figur e
6.8
Example
of
fuzzy
Control-Tangent-Plane
constraint:
the
fuzzy
Con-
trol-Points
represented
by
small
cubes
are fixed and the
surface
is
locally
constrained
by
fuzzy
Control-Tangent-Plane
constraints
defined
by
normal
vectors.
After
run-
ning
DSI,
the
surface
tends
to
become
locally
orthogonal
to the
normal
vectors
in
spite
of
the
fact
that
all the
fuzzy
Control-Points
are
coplanar.
It can be
observed
that
x(a)
changes
at
each
step
of the
iterative
DSI
algo-
rithm: accordingly,
N(a)
=
N(x(a))
also changes
at
each step
of the
iterative
process
and the
above constraints thus need
to be
implemented
as
dynamic
constraints
(see section
(4.4.4)).
From
a
practical point
of
view,
note
that
the
length
of the
edges
of the
triangles
of a
triangulated
surface
have
to be
adapted
to the
variations
of the
unit normal vectors
N:
high-frequency variations
of the
unit normal vectors
require
a
high density
of
triangles
for
modeling
the
surface
accurately.
An
example
of the
application
of
this type
of
constraint
is
presented
in
figure
(6.9).
Fuzzy
Control-Tangent-Plane
constraint
As
suggested
in figure
(6.8), considering
a
triangulated
surface
T(S],
let us
define
a(p,
N,
p)
and
^^(p,
N,p,
d) as
follows:
•
<j(p,N,p)
is a
disc
centered
on
point
p,
orthogonal
to the
unit
vector
N and
having
a
radius
equal
to p
(note
that
p
does
not
necessarily
belong
to
T(S)).
•
<TS(P,
N,p,
d) is the
subset
of the
triangulated
surface
T(S)
consisting
of
the
projection
of
<r(p,
N,p)
on
T(S}
in the
direction
d in
such
a way
that
<TS(P,
N, p, d)
contains
the
projection
of p on
T(S}.
By
definition,
the DSI
constraint specifying
that
as(p,
N, p, d)
should
be,
approximately, orthogonal
to the
vector
N is
called
a
"fuzzy
Control-Tangent-
Plane" constraint.
In
practice,
it is
proposed
to
implement
this
constraint
as
follows:
1.
Determine
the set of
nodes
fig(p, N, p, d) of
T(S)
belonging
to
0"s(p,
N, p, d).
2.
Specify
at
each
node
a 6
Os(p,
N, p, d) a
Normal-Vector
constraint associated
with
the
constant
field of
normal
vectors
N(x)
= N.
Such
an
implementation implies
that
the
notion
of
"fuzzy
Control-Tangent-
Plane"
is a
dynamic constraint (see section
(4.4.4))
because
0-5(p,
N, p, d)
can
change
at
each
step
of the
iterative
process.
267