Hawkes P.W., Spence J.C.H. (Eds.) Science of Microscopy. V.1 and 2
Подождите немного. Документ загружается.

1242 S. Van Aert et al.
from the parametric model. This estimator is important since it achieves
the CRLB asymptotically. In Section 5.4, an important purpose for
which the expressions for the CRLB can be used will be introduced,
namely, statistical experimental design.
5.1 Parametric Statistical Models of Observations
Generally, due to the inevitable presence of noise, sets of observations
made under the same conditions nevertheless differ from experiment
to experiment. The usual way to describe this behavior is to model the
observations as stochastic variables. The reason is that there is no viable
alternative and that it has been found to work (van den Bos, 1999; van
den Bos and den Dekker, 2001). By defi nition, a stochastic variable is
characterized by its probability density function, while a set of stochas-
tic variables has a joint probability density function.
Consider a set of stochastic observations w
m
, m = 1, . . . , M made at
the measurement points x
1
, . . . , x
M
. These measurement points are
assumed to be exactly known. In electron microscopy, the observations
are, for example, electron counting results made at the pixels of a CCD
camera, where M represents the total number of pixels. The reader
should not be misled by the fact that the observations and measure-
ment points are here represented in a one-dimensional way. It is
intended as a general representation. Also if the observations and
measurement points would be two- or higher-dimensional, they can
easily be transformed to a one-dimensional representation. For example,
if the observations and measurement points are two-dimensional, say,
w
kl
, k = 1, . . . , K, l = 1, . . . , L and x
kl
, k = 1, . . . , K, l = 1, . . . , L, respec-
tively, they can also be represented as w
m
, m = 1, . . . , M and x
m
, m =
1, . . . , M, respectively, with M = K × L. The M × 1 vector w defi ned as
w = (w
1
. . . w
M
)
T
(16)
is the column vector of these observations. It represents a point in the
Euclidean M space having w
1
, . . . , w
M
as coordinates. This will be
called space of observations (van den Bos and den Dekker, 2001). The
expectations of the observations, that is, the mean values of the obser-
vations, are defi ned by their probability density function. The vector
of expectations
E[w] = (E[w
1
] . . . E[w
M
])
T
(17)
is also a point in the space of observations and the observations are
distributed about this point. The symbol E[⋅] denotes the expectation
operator. The expectations of the observations are described by the
expectation model, that is, a physical model, that contains the unknown
parameters to be estimated, such as the position coordinates of the
projected atoms or atom columns. In a sense, this model has fi rst been
introduced in Section 4 on the understanding that it now describes the
expectations of the observations whereas in Section 4, the model
describes noise-free observations. The unknown parameters are
represented by the R × 1 parameter vector τ = (τ
1
. . . τ
R
)
T
. Thus, it is
supposed that the expectation of the mth observation is described by
Chapter 20 The Notion of Resolution 1243
E[w
m
] = f
m
(τ) = f(x
m
; τ) (18)
where f
m
(τ) represents the expectation model, which is evaluated at the
measurement point x
m
and which depends on the parameter vector τ.
Apart from the unknown parameters τ, the expectation model may
contain known parameters and experimental settings as well. An
example of an expectation model is given by Eq. (10).
Electron microscopic observations are electron counting results
detected, for example, with a CCD camera. Under the assumption that
the quantum effi ciency of this detector is suffi ciently large to detect
single electrons, these observations may be assumed to be Poisson
distributed. This means that the probability that the observation w
m
is
equal to ω
m
is given by (Papoulis, 1965)
λ
ω
λ
ω
m
m
m
m
!
exp −
(
)
(19)
where the parameter λ
m
is equal to the expectation of the observation
w
m
, which, in its turn, is described by the expectation model.
Therefore,
E[w
m
] = λ
m
= f
m
(τ) (20)
with f
m
(τ) given by Eq. (18). A property of the Poisson distribution is
that the variance of the observation w
m
is equal to λ
m
:
var(w
m
) = λ
m
(21)
Moreover, electron microscopic observations may be assumed to be
statistically independent. The probability P(ω; τ) that a set of observa-
tions w = (w
1
. . . w
M
)
T
is equal to ω = (ω
1
. . . ω
M
)
T
is thus equal to the
product of all probabilities described by Eq. (19):
P
m
m
m
M
m
m
ωτ
λ
ω
λ
ω
;
!
exp
(
)
=−
(
)
=
∏
1
(22)
This function is called the joint probability density function of the obser-
vations. It represents the parametric statistical model of the observa-
tions. The parameters τ to be estimated enter P(ω; τ) via λ
m
.
If the expectation E[w
m
] = λ
m
increases, the Poisson distribution tends
to a normal distribution with both expectation E[w
m
] and variance
var(w
m
) equal to λ
m
of the Poisson distribution (Mood et al., 1974). This
normal approximation is justifi ed if the magnitude of the observations
w
m
is large with respect to the square root of this number (Koster
et al., 1987). Moreover, if the contrast in the images is low, the devia-
tions of the observations from their expectations may be supposed to
be identically distributed, that is, var(w
m
) = σ
2
(Miedema et al., 1994).
Under these conditions the joint probability density function of the
observations is given by
P
m
M
mm
ωτ
πσ
ωλ
σ
;exp
(
)
=−
−
=
∏
1
2
1
2
1
2
(23)
1244 S. Van Aert et al.
In Section 5.2, the parameterized joint probability density function
will be used to derive the CRLB, that is, an expression for the attainable
precision with which the unknown parameters can be estimated unbi-
asedly from the observations. In Section 5.3, from the joint probability
density function, the ML estimator of the parameters will be derived.
This estimator actually achieves the CRLB asymptotically, that is, for
the number of observations going to infi nity.
5.2 The Cramér–Rao Lower Bound
In this section, the parameterized probability density function of the
observations, which is derived in Section 5.1, will be used to defi ne the
Fisher information matrix and to compute the CRLB on the variance of
unbiased estimators of the parameters of the expectation model. The
CRLB will also be extended to include unbiased estimators of vectors
of functions of these parameters. As discussed in the introduction of
Section 5, the CRLB is used as a criterion for statistical model-based
resolution. The reader is referred to van den Bos (1982), Frieden (1998),
and van den Bos and den Dekker (2001) for the details of the CRLB.
First, the Fisher information matrix F with respect to the elements of
the R × 1 parameter vector τ = (τ
1
. . . τ
R
)
T
is introduced. It is defi ned as
the R × R matrix
FE
P
=−
∂
(
)
∂∂
2
ln ;w
T
τ
ττ
(24)
where P(ω; τ) is the joint probability density function of the observa-
tions w = (w
1
. . . w
M
)
T
. The expression between square brackets repre-
sents the Hessian matrix of ln P, for which the (r, s)th element is defi ned
by ∂
2
ln P(ω; τ)/∂τ
r
∂τ
s
. For electron microscopic observations, where
P(ω; τ) is given by Eq. (22), it follows from Eqs. (20), (22), and (24) that
the (r, s)th element of F is equal to
F
rs
m
m
M
m
r
m
s
=
∂
∂
∂
∂
=
∑
1
1
λ
λ
τ
λ
τ
(25)
Furthermore, if the approximation of Eq. (22) by Eq. (23) is justifi ed,
the (r, s)th element of F is equal to
F
rs
m
M
m
r
m
s
=
∂
∂
∂
∂
=
∑
1
2
1
σ
λ
τ
λ
τ
(26)
Next, it can be shown that the covariance matrix cov(
ˆ
τ) of any unbi-
ased estimator
ˆ
τ of τ satisfi es
cov(
ˆ
τ) ≥ F
−1
(27)
This inequality indicates that the difference of the matrices cov(
ˆ
τ) and
F
−1
is positive semidefi nite. Since the diagonal elements of cov(
ˆ
τ) rep-
resent the variances of
ˆ
τ
1
, . . . ,
ˆ
τ
R
and since the diagonal elements of a
positive semidefi nite matrix are nonnegative, these variances are larger
than or equal to the corresponding diagonal elements of F
−1
:

Chapter 20 The Notion of Resolution 1245
var(τ
ˆ
r
) ≥ [F
−1
]
rr
(28)
where r = 1, . . . , R and [F
−1
]
rr
is the (r, r)th element of the inverse of the
Fisher information matrix. In this sense, F
−1
represents a lower bound
to the variances of all unbiased
ˆ
τ. The matrix F
−1
is called the CRLB on
the variance of
ˆ
τ.
The CRLB can be extended to include unbiased estimators of vectors
of functions of the parameters instead of the parameters proper. Let
γ(τ) = [γ
1
(τ) . . . γ
C
(τ)]
T
be such a vector and let γ
ˆ
be an unbiased estimator
of γ(τ). Then, it can be shown that
cov
ˆ
γ
γ
τ
γ
τ
(
)
≥
∂
∂
∂
∂
−
T
T
F
1
(29)
where ∂γ/∂τ
T
is the C × R Jacobian matrix defi ned by its (r, s)th element
∂γ
r
/∂τ
s
(van den Bos, 1982). The right-hand member of this inequality
is the CRLB on the variance of γ
ˆ
.
It should be noted that the CRLB may be computed only if the
probability density function of the observations is known. At fi rst
sight, this seems to be a problem since the true parameters of the
probability density function are unknown. Nevertheless, even if the
CRLB is a function of the unknown parameters, it remains an
extremely useful tool. For nominal values of the unknown parameters
it enables one to quantify variances that might be achieved, to detect
possibly strong covariances between parameter estimates, and, as
will be shown in Section 5.4, to optimize the experimental design (van
den Bos, 1982). Moreover, the estimates obtained using an estimator
that achieves the CRLB may be substituted for the true parameters
in the expression for the CRLB so as to obtain a level of confi dence
to be attached to these estimates (den Dekker and Van Aert, 2002;
den Dekker et al., 2005; Van Aert et al., 2005). This will briefl y be
discussed in Section 5.3.
The attainable precision with which position and distance parameters
of one or two point objects can be measured has been investigated. The
observations consist of counting results in a one- or two-dimensional
pixel array. The model describing the expectations of these observa-
tions has been assumed to consist of Gaussian peaks with unknown
position. Under this assumption, the CRLB, which usually has to be
calculated numerically, may be approximated by a simple rule in closed
analytical form. Although the expectation model of images obtained
in practice are generally of higher complexity than Gaussian peaks, the
rules are suitable to provide insight in the attainable precision of posi-
tion and distance parameters using quantitative atomic resolution
TEM. In Bettens et al. (1999) and Van Aert et al. (2002a), the details of
this study can be found. In the following examples, only the main
results will be presented.
Example 2 (Position Measurement) In this example, the attainable preci-
sion of the position measurement of one isolated point object will be considered.
If the point spread function is assumed to be Gaussian and defi ned by Eq. (1)
and if the total number of imaging particles is N, the lower bound on the
1246 S. Van Aert et al.
standard deviation s
LB
of the coordinates estimates of the position, that is, the
square root of the CRLB, is given by
s
N
LB
≈
ρ
(30)
or, from Eq. (3)
s
N
LB
p
≈
ρ
22
(31)
Thus, the precision with which the position can be determined is a function of
both the Rayleigh resolution ρ
p
and the number of imaging photons N. If N is large,
the precision can be orders of magnitude higher than the point resolution ρ
p
.
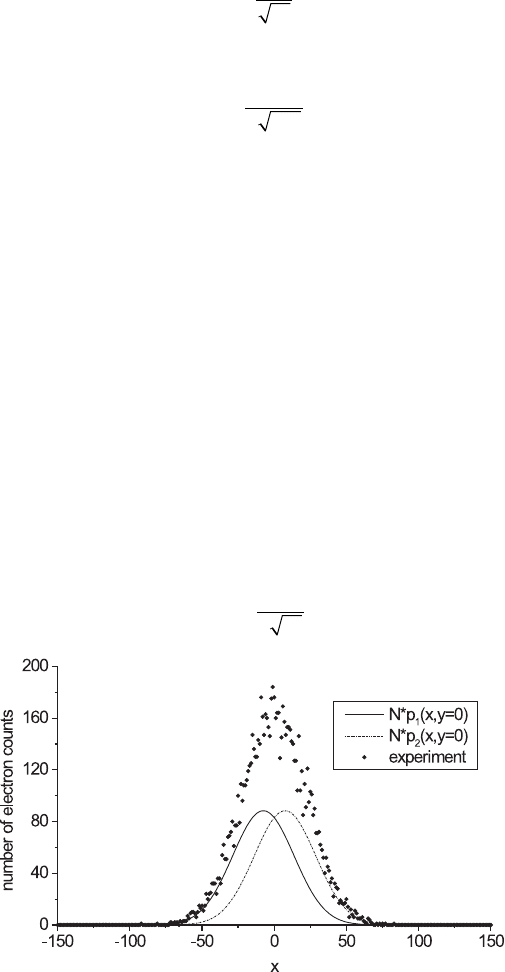
Example 3 (Distance Measurement) Here, the attainable precision of the
distance measurement of two neighboring point objects will be considered. If
the imaging is supposed to be linear, the image consists of the superposition of
the two corresponding point spread functions as simulated in Figures 20–6
and 20–7. The total number of imaging photons used in the simulation is equal
to 2 N. This means that in agreement with Figure 20–5, the number of photons
per peak is equal to N. The results are different for distances smaller than or
larger than ρ
p
/2 and may be summarized as follows.
• d > ρ
p
/2
This is shown in Figure 20–6. Now, the distance d between the atoms is
larger than the half of the Rayleigh resolution. Then, the lower bound on
the standard deviation s
MIN
on the distance d is minimal, independent of d,
and given by
s
N
MIN
p
≈
ρ
2
(32)
Figure 20–7. The results of a computer-simulated image of two neighboring
points with a Gaussian point spread function, where p
1,2
(x, y) are two-dimen-
sional normalized Gaussian point spread functions, as in Eq. (1). The experi-
mental as well as the expectation values of the individual peaks [N × p
1,2
(x, y)]
are plotted within the section y = 0. The number of imaging particles 2N is
equal to 500,000. The peaks overlap severely.
Chapter 20 The Notion of Resolution 1247
Thus, from Eq. (31) it follows that the CRLB on the variance of the distance
is twice the CRLB on the variance of the position of an isolated point
object:
ss
MIN LB
22
2= (33)
The reason for this is that the coordinate estimates of neighboring atoms are
uncorrelated for distances larger than ρ
p
/2.
• d ≤ ρ
p
/2
This is shown in Figure 20–7. Now, the distance d between the atoms is
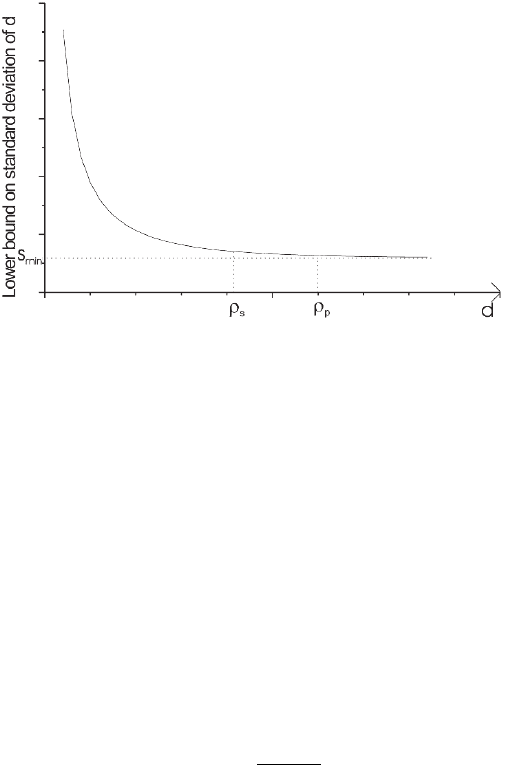
smaller than the half of the Rayleigh resolution. Then, the lower bound on
the standard deviation s
LB
increases inversely proportionally to the distance
d, following approximately the relation
sd
s
d
LB
MIN p
(
)
≈
ρ
2
(34)
where s
MIN
is given by Eq. (32).
In Figure 20–8, the lower bound on the standard deviation of the distance
d is shown as a function of the distance.
In this section, statistical model-based resolution has been discussed
in terms of the CRLB. In this discussion, the parametric statistical
model of the observations, that is, the joint probability density func-
tion, has been assumed to be exact. Then, it is clear that statistical
model-based resolution is limited by the lower bound on the variance
or on the standard deviation. This limit is fundamental. Moreover, if
the model is inaccurate, the introduced systematic error determines
another fundamental limit to statistical model-based resolution. Apart
from these fundamental limits, computational limits exist as well, just
as for deterministic model-based resolution. The computing time
needed to fi t the model to the images with respect to the unknown
parameters increases with the total number of parameters to be
Figure 20–8. The lower bound on the standard deviation of the distance d as
a function of the distance.
1248 S. Van Aert et al.
measured. Furthermore, the optimization methods fail if the structure
is not resolved.
5.3 Maximum Likelihood Estimation
In this section, the derivation of the ML estimator of the parameters
from the parameterized probability density function, which is dis-
cussed in Section 5.1, will be discussed. This estimator is very impor-
tant since it achieves the CRLB asymptotically, that is, for the number
of observations going to infi nity. Thus, it is asymptotically most precise
and is therefore often used in practice. The ML estimator is clearly
discussed in van den Bos and den Dekker (2001) and den Dekker et al.
(2005). A summary is given here.
The ML method for estimation of the parameters consists of three
steps:
1. The available observations w = (w
1
. . . w
M
)
T
are substituted for the
corresponding independent variables ω = (ω
1
. . . ω
M
)
T
in the probability
density function, for example, in Eq. (22) or in Eq. (23). Since the obser-
vations are numbers, the resulting expression depends only on the
elements of the parameter vector τ = (τ
1
. . . τ
R
)
T
.
2. The elements of τ = (τ
1
. . . τ
R
)
T
, which are the hypothetical true
parameters, are considered to be variables. To express this, they are
replaced by t = (t
1
. . . t
R
)
T
. The logarithm of the resulting function, ln
P(w; t), is called the log-likelihood function of the parameters t for the
observations w, which is denoted as q(w; t).
3. The ML estimates
ˆ
τ
ML
of the parameters τ are defi ned by the values
of the elements of t that maximize q(w; t), or
ˆ
τ
ML
= arg max
t
q(w; t) (35)
For independent normally distributed observations with equal vari-
ance, for which the joint probability density function is given by Eq.
(23), it can easily be shown that the ML estimator is equal to the well-
known uniformly weighted least-squares estimator (van den Bos and den
Dekker, 2001; den Dekker et al., 2005). The uniformly weighted least-
squares estimates
ˆ
τ
LS
of the unknown parameters τ are given by the
values of t that minimize the uniformly weighted least-squares criterion:
ˆ
arg minτ
LS
=−
(
)
[]
=
∑
tmm
m
M
wft
2
1
(36)
where the function f
m
is defi ned by Eq. (18).
The most important properties of the ML estimator are the
following:
• Consistency. Generally, an estimator is said to be consistent if the
probability that an estimate deviates more than a specifi ed amount
from the true value of the parameter can be made arbitrarily small
by increasing the number of observations used.
• Asymptotic normality. If the number of observations increases, the
probability density function of an ML estimator tends to a normal
distribution.
Chapter 20 The Notion of Resolution 1249
• Asymptotic effi ciency. The asymptotic covariance matrix of an ML
estimator is equal to the CRLB. In this sense, the ML estimator is
most precise.
• Invariance property. The ML estimates γ
ˆ
ML
of a vector of functions of
the parameters τ, that is, γ(τ) = [γ
1
(τ) . . . γ
C
(τ)]
T
, are equal to γ(
ˆ
τ
ML
) =
[γ
1
(
ˆ
τ
ML
) . . . γ
C
(
ˆ
τ
ML
)]
T
(Mood et al., 1974).
To evaluate the level of confi dence to be attached to the obtained ML
estimates, confi dence regions and intervals associated with these esti-
mates are required. A summary of existing methods to compute such
regions and intervals is presented in den Dekker et al. (2005). One of
these methods is based on the asymptotic normality of the ML estima-
tor. It is preferred, especially if the experiment cannot be replicated.
For example, an approximate 100(1 − α)% confi dence interval for the
rth element of τ, τ
r
, is given by
ˆ
τλ
αML
[]
±
−
(
)
−
r
rr
F
12
1
(37)
with [
ˆ
τ
ML
]
r
the rth element of the parameter vector
ˆ
τ
ML
, [F
−1
]
rr
the (r, r)th
element of F
−1
, and λ
(1−α/2)
the (1 − α/2) quantile of the standard normal
distribution. The meaning of a 100(1 − α)% confi dence interval is that
it covers the true element τ
r
of τ with probability 1 − α. Usually, F
−1
is
a function of the parameters to be estimated. The confi dence intervals
(37) are then derived by using approximations of F
−1
. A useful approxi-
mation
ˆ
F
−1
of F
−1
may be obtained by substituting
ˆ
τ
ML
for τ in the expres-
sion for the CRLB yielding
ˆ
F
−1
= F
−1
|
τ=
ˆ
τ
ML
(38)
The effectiveness of the ML method will be shown in the following
example, where it will be applied to experimental high-resolution TEM
(HRTEM) images of an aluminum crystal. The details of this study can
be found in Van Aert et al. (2005).
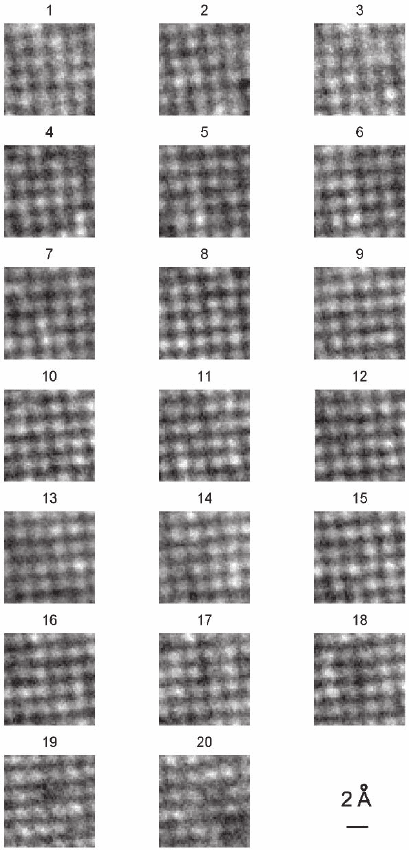
Example 4 (Maximum Likelihood Estimation of Structure Parame-
ters from HRTEM Images of an Aluminum Crystal) Structure param-
eters, atom column distances in particular, have been estimated from HRTEM
images of an aluminum crystal using the ML method. Therefore, 20 images
have been recorded and afterward been corrected for specimen drift using
cross-correlation. From these corrected images, a particular region consisting
of 51 times 50 pixels has been selected. The individual images resulting from
this procedure are shown in Figure 20–9. The observations corresponding to
these individual images, that is, the 51 times 50 image pixel values, are sup-
posed to be independent normally distributed with equal variance. For such
observations, the joint probability density function is given by Eq. (23).
Moreover, the expectation model has been supposed to be given by Eq. (10).
The unknown parameters of this model have then been estimated using the
ML estimator, which for these types of observations is equal to the uniformly
weighted least-squares estimator given by Eq. (36). Furthermore, ML esti-
mates of the atom column distances have been obtained using the invariance
property of the ML estimator. Also confi dence intervals for the parameters
have been computed. For example, for the atom column distances, the
1250 S. Van Aert et al.
precision has been shown to be of the order of 0.03 Å, with the precision
represented by the square root of the approximated CRLB on the variance of
the distance with the approximated CRLB given by Eq. (38). Obviously, the
value to be attached to the obtained estimates and confi dence intervals depends
on the validity of the model. Therefore, it is important to test the proposed
model before attaching confi dence to these estimates. This has been done
using the model assessment methods described in den Dekker et al. (2005)
and Van Aert et al. (2005). From these methods, it could be concluded that
the proposed model is a suffi ciently adequate description of the experimental
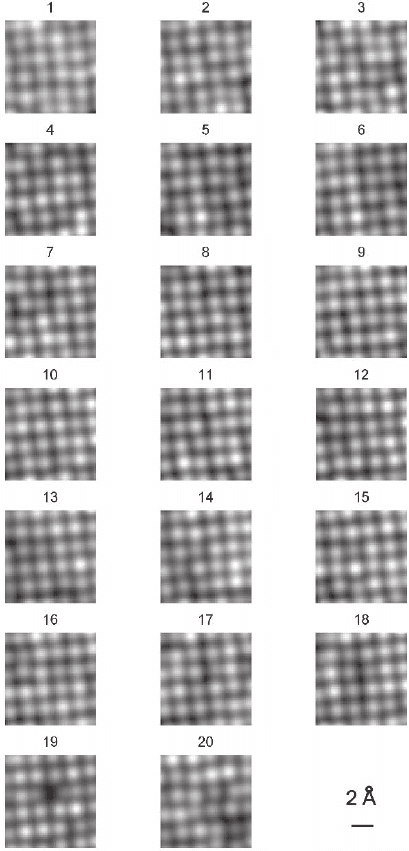
observations. The model evaluated at the obtained ML estimates is shown in
Figure 20–10. Note that this fi gure may be regarded as an optimal image
reconstruction.
Figure 20–9. HRTEM
observations of an alu-
minum crystal.
Chapter 20 The Notion of Resolution 1251
Finally, the variation of the atom column distance estimates has been com-
pared to the variance that would be expected if the statistical fl uctuations of
the observations would be the only source of variation of the distance esti-
mates. The former has been measured by means of the well-known sample
variance (Mood et al., 1974) and the latter by means of the CRLB. If statisti-
cal fl uctuations would be the only source of contribution to the variation of
the distance estimates, the sample variance and the estimated CRLB should
be about equal to one another. However, from a comparison of both, it followed
that the sample variance was about 10 times larger than the estimated CRLB.
Hence, there must be a further, dominant contribution to the variation of
the distance estimates. Because of this the atom columns of the crystal were
not observed at a perfectly periodic crystal lattice in the experiment and, in
Figure 20–10. The exp-
ection models as des cr-
ibed by Eq. (10) evaluated
at the estim ated par-
ameters obta ined from
the experimental images
shown in Figure 20–9
using the ML method.