Hassani S. Mathematical Methods: For Students of Physics and Related Fields
Подождите немного. Документ загружается.

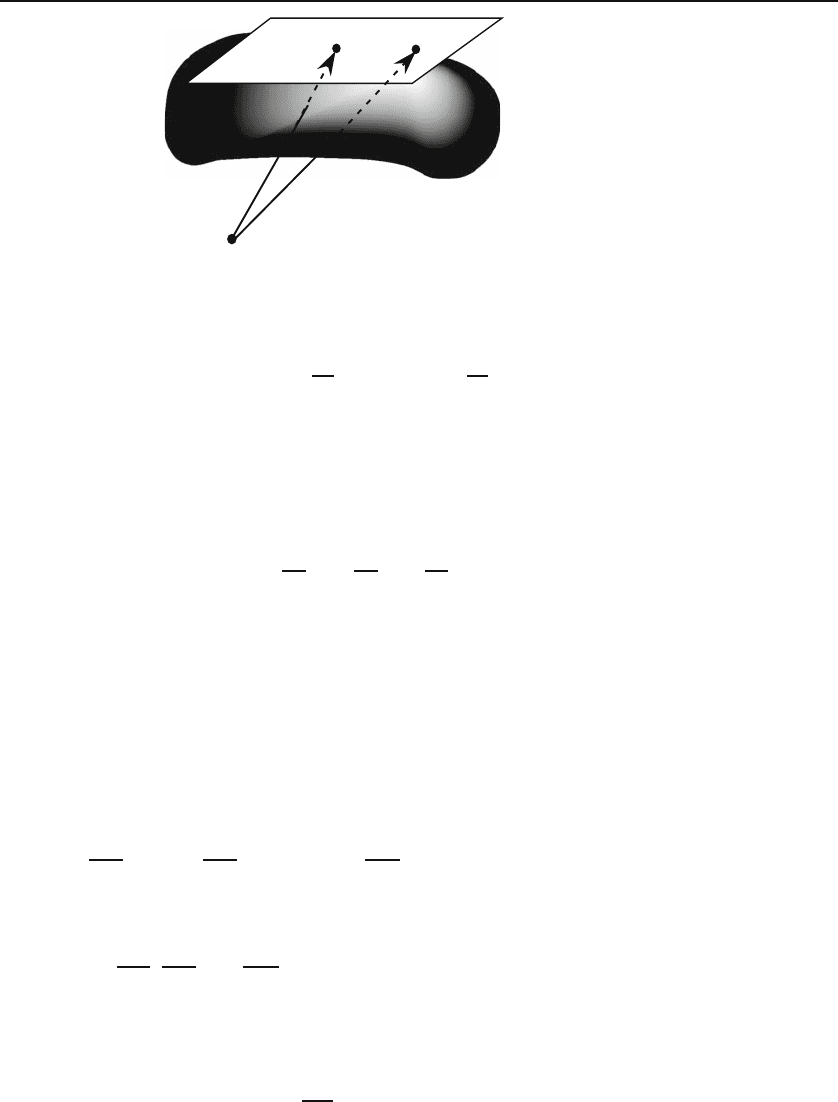
12.3 The Gradient 359
P
(x, y, z)
r
r
0
O
Figure 12.9: The plane tangent to the surface z = g(x, y) at P .
or
z − z
0
=(x − x
0
)
∂g
∂x
P
+(y − y
0
)
∂g
∂y
P
It is convenient to introduce a differentiation operator which we shall use
later.
the del operator
Definition 12.3.2. The symbol ∇ can be thought of as a vector operator,
called del or nabla, whose components are ∂/∂x,∂/∂y,and∂/∂z.Thus,we
can write
∇ =
ˆ
e
x
∂
∂x
+
ˆ
e
y
∂
∂y
+
ˆ
e
z
∂
∂z
. (12.28)
This vector operator ∇ operates on differentiable functions and produces vec-
tor fields.
12.3.1 Gradient and Extremum Problems
The gradient is very nicely used to find the maxima and minima of functions
of several variables. A function f(x)ofn variables x =(x
1
,x
2
,...,x
n
)hasa
local extremum (maximum or minimum) at a point a if its differential vanishes
at that point for arbitrary dx:
df =
∂f
∂x
1
a
dx
1
+
∂f
∂x
2
a
dx
2
+ ···+
∂f
∂x
n
a
dx
n
≡
∇f(a)
!
· dx =0
where
∇f ≡
∂f
∂x
1
,
∂f
∂x
2
,...,
∂f
∂x
n
and dx ≡dx
1
,dx
2
,...,dx
n
.
If the dot product of ∇f (a)anddx is to vanish for arbitrary dx,then∇f(a)
must be zero. Thus for f to have an extremum at a,wemusthave
∇f(a)=0 or
∂f
∂x
i
a
=0,i=1, 2,...,n. (12.29)
360 Vectors and Derivatives
This is the generalization to n variables the familiar condition known from
calculus.
In many situations, there are auxiliary conditions or constraints imposed
on the independent variables. For example, let P
1
, Q,andP
2
be three points
in space, with P
1
and P
2
fixed but Q being allowed to move. Consider the
path P
1
QP
2
consisting of straight line segments P
1
Q and QP
2
. What choice
of Q gives the shortest path? If we denote the coordinates of Q by (x, y, z)
and those of P
1
and P
2
with obvious subscripts, then we have to find the
extremum of
f(x, y, z)=
(x − x
1
)
2
+(y − y
1
)
2
+(z − z
1
)
2
+
(x − x
2
)
2
+(y − y
2
)
2
+(z − z
2
)
2
.
So we set partial derivatives equal to zero and solve for (x, y, z). The answer,
as expected, turns out to be the path for which Q lies on the line segment
P
1
P
2
between P
1
and P
2
.
Now suppose we demand that Q lie on a sphere of radius a centered at the
origin. Then the problem becomes extremizing f (x, y, z) with the constraint
condition that
g(x, y, z) ≡ x
2
+ y
2
+ z
2
− a
2
=0.
To solve this problem, we could solve for one of the variables of the constraint
equation in terms of the other two, substitute in f(x, y, z), and solve the re-
sulting two-variable problem. But there is a much more elegant way involving
gradients, which we discuss now.
Suppose that we want to find the extremum of a function f(x)ofn vari-
ables x =(x
1
,x
2
,...,x
n
) subject to the condition that x must lie on the
hypersurface g(x) = 0. We cannot set ∇f equal to zero because dx is no
longer arbitrary.
With constraint, dx is confined to the surface g(x)=0. Now,theonly
n-dimensional vector which has a vanishing dot product with any dx on the
constrained surface is (a multiple of) the normal to the surface. Therefore, if
(∇f)·dx is to be zero for dx lying on the surface, then ∇f must be a multiple
of the normal to the surface g(x) = 0. But this normal is nothing but ∇g.
Therefore, if f is to have an extremum subject to the constraint g(x)=0,
then it must obey the following equation
∇f = −λ∇g or ∇f + λ∇g =0,
where λ is an arbitrary constant called the Lagrange multiplier.This
equation shows that to find the extremum of the function f with constraint
g(x) = 0, one can define the function F of n +1variables
Lagrange
multipliers
F (x
1
,x
2
,...,x
n
; λ) ≡ f(x
1
,x
2
,...,x
n
)+λg(x
1
,x
2
,...,x
n
),
12.3 The Gradient 361
and extremize it without constraint.Thenwehave
∂F
∂x
i
=
∂f
∂x
i
+ λ
∂g
∂x
i
=0,i=1, 2,...,n,
∂F
∂λ
= g(x
1
,x
2
,...,x
n
)=0. (12.30)
The last equation is just the constraint condition, but it comes out conve-
niently as one of the extremal equations of F .
Example 12.3.4.
A rectangular box is to be made out of a given amount A of
material to have the largest volume. What dimensions should the box have? Here
f(x, y, z)=xyz,thevolume,andg(x, y, z)=2xy +2xz +2yz − A. Setting the
components of the gradient of
F (x, y, z; λ)=xyz +2λ(xy + xz + yz −A/2)
equal to zero yields four equations
yz +2λ(y + z)=0,
xz +2λ(x + z)=0,
xy +2λ(x + y)=0,
2(xy + xz + yz) − A =0.
Multiplying the first equation by x and the second equation by y and subtracting
yields
2λx(y + z) − 2λy(x + z)=0
, or x = y.
Similarly, from the second and third equations we get y = z. So, the box should be
a cube. The last equation then gives
6x
2
− A =0, or x = y = z =
A
6
.
Substituting this in any of the above equations involving λ yields λ = −
1
4
A/6.
The extremal problems may have several constraint equations such as
g
j
(x
1
,x
2
,...,x
n
) ≡ g
j
(x)=0,j=1, 2,...,m. (12.31)
We can “eliminate” the first constraint by replacing f(x
1
,x
2
,...,x
n
)with
F
1
(x; λ
1
) ≡ f(x)+λ
1
g
1
(x),
where F
1
has only m − 1 constraint equations. Now eliminate the second
constraint by defining
F
2
(x; λ
1
,λ
2
) ≡ F
1
(x; λ
1
)+λ
2
g
2
(x)=f(x)+λ
1
g
1
(x)+λ
2
g
2
(x).
Continuing, we can eliminate all constraints by defining
F (x; λ
1
,λ
2
,...,λ
m
) ≡ f(x)+
m
j=1
λ
j
g
j
(x), (12.32)
whose unconstrained extremization yields the extremal equations.

362 Vectors and Derivatives
12.4 Problems
12.1. Find directly the solid angle subtended by a disk of radius a at a point
P on its perpendicular axis located a distance b from the center.
12.2. Aclosedcurveρ =3a + a cos ϕ in cylindrical coordinates bounds a
region in the xy-plane. Find the solid angle subtended by this region at a
point P on the z-axis a distance 2a above the xy-plane.
12.3. Derive Equation (12.11).
12.4. Show that when a moving particle is confined to a circle, its velocity is
always perpendicular to its radius. If, furthermore, the speed of the particle
is constant, then its acceleration is radial.
12.5. Derive Equations (12.17) and (12.18).
12.6. The vectors a and b are given by
a = u
ˆ
e
x
+ v
ˆ
e
y
, b = v
ˆ
e
x
− u
ˆ
e
y
.
(a) Write
ˆ
e
a
and
ˆ
e
b
in terms of Cartesian unit vectors.
(b) Find the four vectors ∂
ˆ
e
a
/∂u, ∂
ˆ
e
a
/∂v, ∂
ˆ
e
b
/∂u,and∂
ˆ
e
b
/∂v in terms of
Cartesian unit vectors.
(c) Express
ˆ
e
x
and
ˆ
e
y
in terms of
ˆ
e
a
and
ˆ
e
b
.
(d) Express the four vectors ∂
ˆ
e
a
/∂u, ∂
ˆ
e
a
/∂v, ∂
ˆ
e
b
/∂u,and∂
ˆ
e
b
/∂v in terms
of
ˆ
e
a
and
ˆ
e
b
.
(e) If u and v are functions of time, find d
ˆ
e
a
/dt and d
ˆ
e
b
/dt in terms of
ˆ
e
a
and
ˆ
e
b
.
12.7. Derive Equation (12.19).
12.8. Derive Equation (12.23).
12.9. Show that (12.22) and the assumption θ = π/2 solve the last two
equations of (12.20) and reduce the first one to (12.24).
12.10. (a) Obtain the time derivatives of the cylindrical unit vectors:
d
ˆ
e
ρ
dt
=˙ϕ
ˆ
e
ϕ
,
d
ˆ
e
ϕ
dt
= − ˙ϕ
ˆ
e
ρ
,
d
ˆ
e
z
dt
=0.
(b) Use the result of (a) to show that if A is a vector written in terms of
cylindrical unit vectors, then
dA
dt
=
dA
ρ
dt
− A
ϕ
˙ϕ
ˆ
e
ρ
+
A
ρ
˙ϕ +
dA
ϕ
dt
ˆ
e
ϕ
+
dA
z
dt
ˆ
e
z
.
12.11. Asurfaceisgivenby
x
2
a
2
+
y
2
4a
2
+
z
2
2a
2
= 1. Find the unit normal to
the surface and the equation of the tangent plane at (a/2,a,a).
12.4 Problems 363
12.12. The potential of a certain charge distribution is given by
Φ(x, y, z)=z
2
+
y
2
4
+
x
2
9
.
(a) Find the electric field E = −∇Φat(3/
√
2, 1, 1/2) and show that it is
normal to the surface
z
2
+
y
2
4
+
x
2
9
=1.
(b) Show that the electric field is normal at every point of this surface.
(c) Show that the electric field is normal at every point of the surface obtained
by replacing 1 on the RHS of the last equation by any arbitrary constant.
12.13. Show that ∇(fg)=(∇f)g + f(∇g) for any two (differentiable) func-
tions f and g of (x, y, z).
12.14. Consider the plane ax + by + cz = d and a point P =(x
0
,y
0
,z
0
)
not lying in the plane. Use Lagrange multipliers to show that the parametric
equation of the line passing through P that gives the minimum distance to
the plane is
r = r
0
+ tn, where r = x, y, z, r
0
= x
0
,y
0
,z
0
, n = a, b, c.
(12.33)
From this deduce that the distance from P to the plane is
|d −ax
0
− by
0
− cz
0
|
√
a
2
+ b
2
+ c
2
.
Hint: Take the dot product of (12.33) with n and use the fact that n · r = d
when the tip of r is in the plane.
12.15. Consider the sphere (x − a)
2
+(y − b)
2
+(z − c)
2
= d
2
and a point
P =(x
0
,y
0
,z
0
) not lying on the sphere. Use Lagrange multipliers to show that
the shortest line segment connecting P to the sphere is that which extends
through the center of the sphere.
12.16. For a vector A(r,t) that is a function of position and time, show that
dA =(dr · ∇)A +
∂A
∂t
dt.
12.17. Find the gradient of
u(x, y, z, x
,y
,z
) ≡ u(r − r
)=|r −r
|
m
,
first with respect to the components of r and then with respect to the com-
ponents of r
, and write the answer completely in terms of r and r
.Whatis
the answer when m = −1?

Chapter 13
Flux and Divergence
A vector field is a function with direction, and because of this directional
property, many new kinds of differentiation and integration can be performed
on it. For instance, a vector field can be made to pierce a surface or an element
thereof, and as it pierces that surface its variation from point to point can be
monitored. This leads to one kind of differentiation and integration which we
discuss next. The integration leads to the concept of the flux of a vector field,
and the associated differentiation to the notion of divergence.
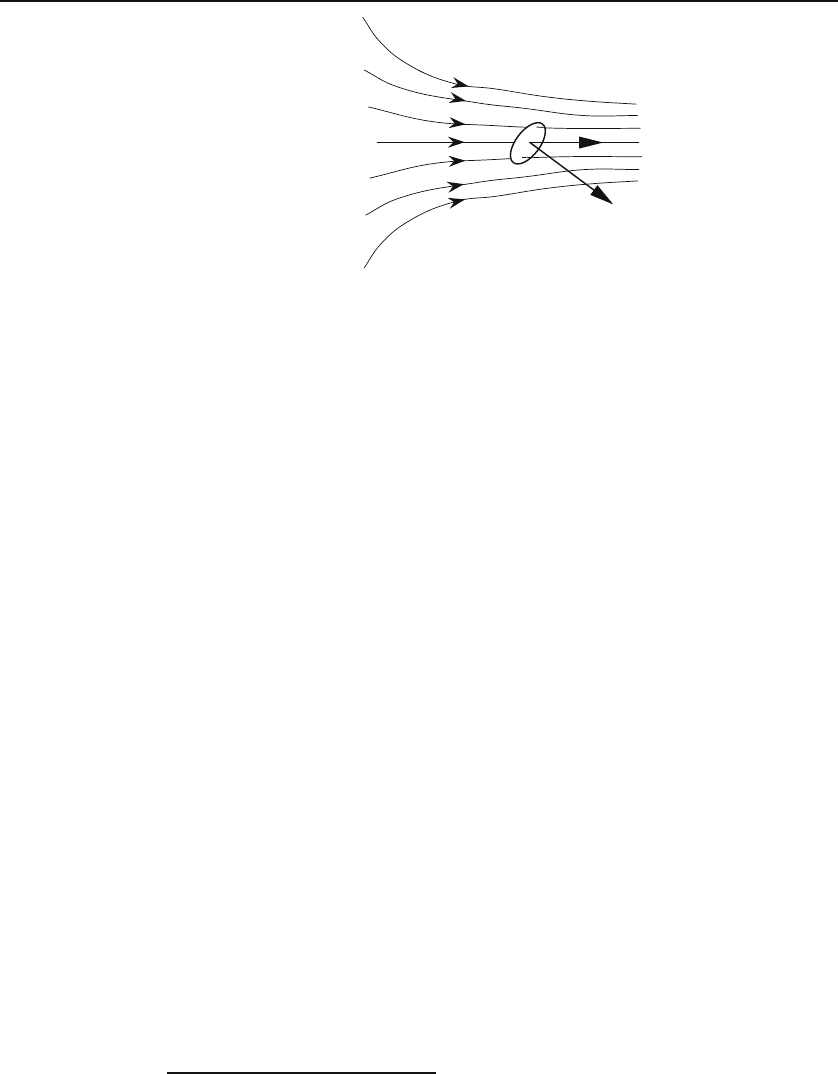
13.1 Flux of a Vector Field
The paradigm of the concept of flux is that of the velocity field of a fluid (see
Figure 13.1). A small ring of area Δa is situated in the flow. How much fluid
is passing through the ring per unit time? It is clear that the answer depends
on the density of the fluid,
1
thespeedofthefluid,thesizeoftheareaΔa,and
also on the relative orientation of the direction of the flow and the unit normal
to the area, denoted by
ˆ
e
n
. A little contemplation reveals that the amount of
fluid of constant unit density passing through Δa is proportional to
2
flux of flow
velocity through a
small area
Δφ = v ·
ˆ
e
n
Δa ≡ v · Δa, (13.1)
where Δφ is called the flux of v through Δa,andΔa is defined to be
ˆ
e
n
Δa.
If the ring is replaced by a large surface S then we have to divide the surface
into small areas—not necessarily in the shape of a ring—and sum up the con-
tribution of each area to the flux. In the limit of smaller and smaller areas
and larger and larger numbers of such areas, we obtain an integral:
total flux of flow
velocity through a
large area
φ = lim
Δa→0
N→∞
N
i=1
v
i
·
ˆ
e
n
i
Δa
i
≡ lim
Δa→0
N→∞
N
i=1
v
i
·Δa
i
=
##
S
v ·da, (13.2)
where φ is the total flux through S.
1
For simplicity we assume that density is constant and we take it to be 1.
2
We shall come back to a rigorous derivation of the flow of a substance through a small
loop later (see the discussion after Theorem 13.2.2).
366 Flux and Divergence
ˆ
e
n
v
da
Figure 13.1: Flux of velocity vector through a small area Δa.
There is an arbitrariness in the direction of the unit vector normal to an
element of area, because for any unit normal, there is another which points in
the opposite direction. The flux for these two unit normals will have opposite
signs. This may appear as if one could arbitrarily choose every one of the
unit normals
ˆ
e
n
i
in the sum (13.2) to have either one of the two opposite
orientations, leading to an arbitrary result for the integral. This is not the case,
the total flux can
be determined
only up to a sign.
because the direction of the unit normal to an element of area is determined
by the neighboring unit normals and the requirement of continuity. So, once
the choice is made between the two possibilities of the unit normal for one
element of area of the surface S,saythefirstone
ˆ
e
n
1
, the second one can
differ only slightly from
ˆ
e
n
1
—in particular, it cannot be of opposite sign. The
third one should point in almost the same direction as the second one, and
so on. This requirement of continuity will uniquely determine the remaining
unit normals. However, the initial choice remains arbitrary, and since the
two orientations of the initial choice differ by a sign, the two total fluxes
corresponding to these two orientations will also differ by a sign. We shall see
shortly, however, that for closed surfaces, such an arbitrariness in sign can be
overcome by convention.
The discussion above works for orientable surfaces. This means that on
orientable surface
any closed loop entirely on the surface, the direction of a normal vector will
not change when one displaces it on the loop continuously one complete orbit.
It is clear that the lateral surface of a cylinder is orientable.
A cylinder is obtained by glueing the two edges of a rectangle. Now take
the same rectangle and twist one of the (smaller) edges before glueing it to the
opposite edge. The result—which the reader may want to construct—is a very
famous mathematical surface called the M¨obius band.AM¨obius band is not
M¨obius band
orientable, because if one starts at the midpoint of the glued edges and moves
perpendicular to it along the large circle (length of the original rectangle),
then a unit normal displaced continuously and completely along the circle
will be flipped.
3
In this book we shall never encounter nonorientable surfaces.
3
The reader is urged to perform this surprising experiment using a (portion of a) tooth-
pick as a unit normal.
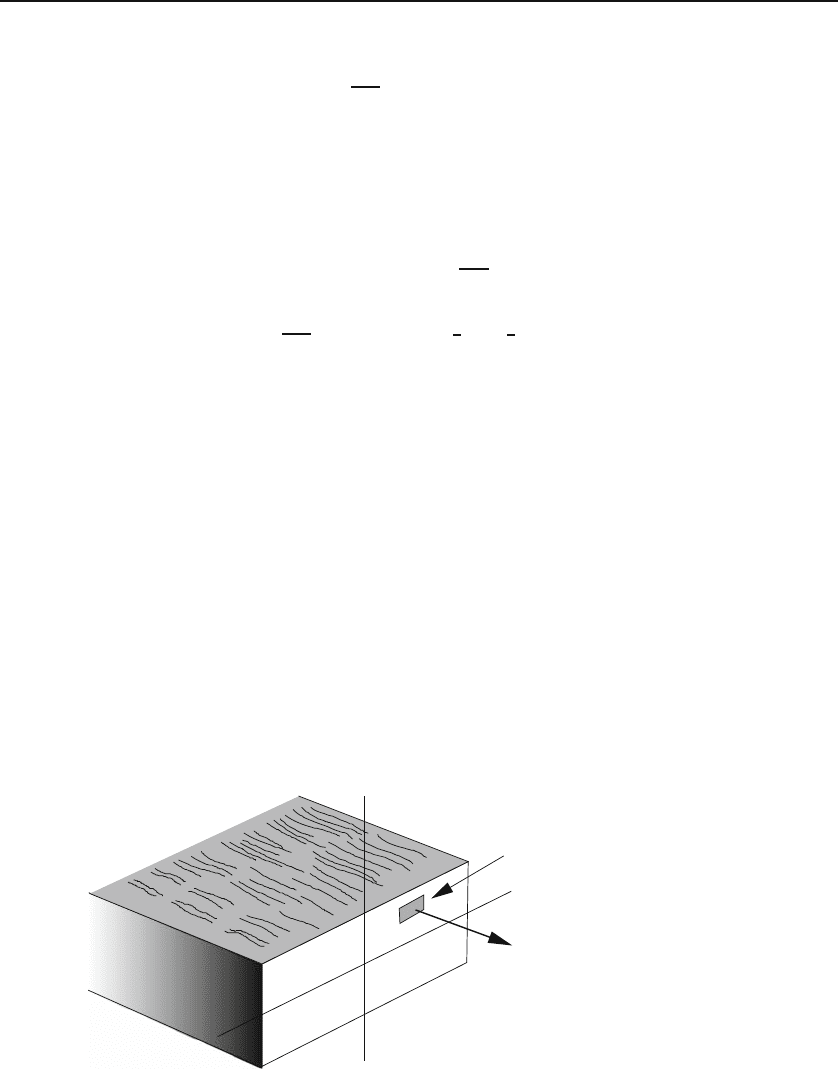
13.1 Flux of a Vector Field 367
Example 13.1.1. Consider the flow of a river and assume that the velocity of the
water is given by
v = v
0
1 −
4x
2
w
2
ˆ
e
z
,
where x is the distance from the midpoint of the river and w is the width of the
river. Let us find the flux of the velocity, assuming that the cross section of the river
is a rectangle with depth equal to h, as shown in Figure 13.2.
The normal to the area da is perpendicular to the xy-planeandisinthesame
direction as the velocity. Thus, we have v · da = vda= vdxdy,and
φ =
##
S
vdxdy=
#
h/2
−h/2
dy
#
w/2
−w/2
v
0
1 −
4x
2
w
2
dx
= hv
0
#
w/2
−w/2
1 −
4x
2
w
2
dx = hv
0
(w −
1
3
w)=
2
3
Av
0
,
where S is the cross section of the river and A is its area.
The concept of flux, although indicative of a flow, is not limited to the
velocity vector field. We can define the flux of any vector field A in exactly
flux can be defined
not only for
velocity, but for
any vector field.
the same way:
φ =
##
S
A ·da. (13.3)
Whether such a definition is useful or not should be determined by experi-
ment. It turns out that the flux of every physically relevant vector field is
not only useful, but essential for the theoretical—as well as experimental—
investigation of that field. For example, the flux of a gravitational field
through a closed surface is related to the amount of mass in the volume
enclosed in the surface. Similarly, the rate of change of the flux of a magnetic
field through a surface gives the electric field produced at the boundary of the
surface.
ˆ
e
n
O
x
y
da = dx dy
Figure 13.2: The river with its cross section.
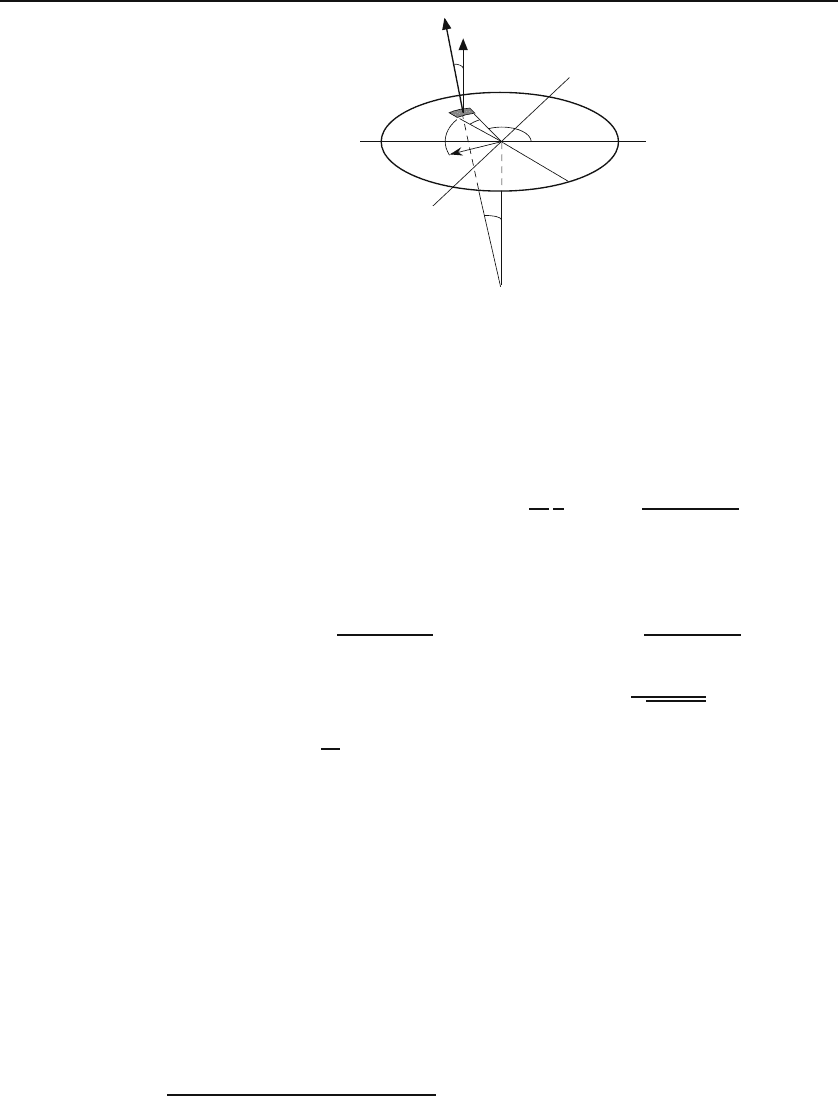
368 Flux and Divergence
θ
θ
E
ˆ
e
n
d
ϕ
ϕ
a
x
y
d
r
q
ρ
Figure 13.3: The flux of the electric field through a circle. The normal unit vector
ˆ
e
n
could be chosen to be either up or down. We choose (quite arbitrarily) the up direction
to make the flux positive for positive q.
Example 13.1.2. Consider the flux of the electric field of a point charge located
at a distance d from the center of a circle of radius a as shown in Figure 13.3. The
element of flux is given by
E · da = |E|cos θda = |E|cos θρdρdϕ =
kq
r
2
d
r
ρdρdϕ =
kqd
(d
2
+ ρ
2
)
3/2
ρdρdϕ,
where
ˆ
e
n
is chosen to point up. The polar coordinates (ρ, ϕ) are used to specify a
point in the plane of the circle at which point the element of area is ρdρdϕ. To find
the total flux, we integrate the last expression above:
φ =
##
S
kqd
(d
2
+ ρ
2
)
3/2
ρdρdϕ = kqd
#
2π
0
dϕ
#
a
0
ρdρ
(d
2
+ ρ
2
)
3/2
=2πkqd
3
−(d
2
+ ρ
2
)
−1/2
a
0
4
=2πkq
1 −
d
√
d
2
+ a
2
.
Note that since d represents a distance, as opposed to a coordinate, it is always
positive and d =
√
d
2
= |d|.
It is often necessary to calculate the flux of a vector field through a closed
surface bounding a volume. Intuitively, such a flux gives a measure of the
for a closed
surface, one can
uniquely
determine the
direction of
normal at each
point of the
surface.
strength of the source of the vector field in the volume. For instance, the flux
of the velocity field of water through a closed surface bounding a fountain
measures the rate of the water output of the fountain. If the surface does
not enclose the fountain, the net flux will be zero because the flux through
one “side” of the closed surface will be positive and that of the other “side”
will be negative with the total flux vanishing. In the case of an electrostatic
field, the flux through a closed surface measures the amount of charge in the
volume bounded by that surface. The sign of the flux requires an orientation
of the bounding surface which is equivalent to the assignment of a positive
direction to the unit normal to the surface at each of its points. We agree to
out is positive!
adhere to the convention of Box 12.1.3.
4
4
Only orientable surfaces can have a well defined orientation. Since we are excluding
nonorientable surfaces from this book, all our surfaces respect Box 12.1.3.
13.1 Flux of a Vector Field 369
Example 13.1.3. Let us consider the flux through a sphere of radius a centered
at the origin of a vector field A given by A = kQr
m
ˆ
e
r
with k a proportionality
constant and Q the strength of the source. Assuming that the outward normal is
considered positive (see Box 12.1.3) the total flux through the sphere is calculated
as
φ
Q
=
##
S
A · da =
##
S
kQa
m
ˆ
e
r
· (
ˆ
e
r
a
2
sin θdθdϕ)
= kQ
#
2π
0
dϕ
#
π
0
a
m
a
2
sin θdθ =2πkQa
m+2
#
π
0
sin θdθ=4πkQa
m+2
.
It is important to keep in mind that when calculating the flux of a vector field, one remember to
evaluate the
vector field at the
surface when
calculating its
flux!
has to evaluate the field at the surface.Thatiswhya appears in the integral rather
than r. Notice how the flux depends on the radius of the sphere. If m +2> 0, then
the farther away one moves from the origin, the more total flux passes through the
sphere. On the other hand, if m +2< 0, although the size of the sphere increases,
and therefore, more area is available for the field to cross, the field decreases too
rapidly to give enough flux to the large sphere, so the flux decreases. The important
case of m = −2 eliminates the dependence on a: The total flux through spheres of
different sizes is constant. This last statement is a special case of the content of the
celebrated Gauss’s law.
Historical Notes
Space vectors were conceived as three-dimensional generalizations of complex num-
bers. The primary candidates for such a generalization however turned out to be
quaternions—discovered by Hamilton—which had four components. One could nat-
urally divide a quaternion into its “scalar” component and its vector component,
the latter itself consisting of three components. The product of two quaternions,
being itself a quaternion, can also be divided into scalar and vector parts. It turns
out that the scalar part of the product contains the dot product of the vector parts,
and the vector part of the product contains the cross product of the vector parts.
However, the full product contains some extra terms.
Physicists, on the other hand, were seeking a concept that was more closely
associated with Cartesian coordinates than quaternions were. The first step in this
direction was taken by James Clerk Maxwell. Maxwell singled out the scalar and the
vector parts of Hamilton’s quaternion and put the emphasis on these separate parts.
In his celebrated A Treatise on Electricity and Magnetism (1873) he does speak of
quaternions but treats the scalar and the vector parts separately.
Hamilton also developed a calculus of quaternions. In fact, the gradient operator
introduced in Definition 12.3.2 and its name “nabla” were both Hamilton’s inven-
tion.
5
Hamilton showed that if ∇ acts on the vector part v of a quaternion, the
result will be a quaternion. Maxwell recognized the scalar part of this quaternion
to be the divergence (to be discussed in the next section) of the vector v,andthe
vector part to be the curl (to be discussed in the Section 14.2) of v.
Maxwell often used quaternions as the basic mathematical entity or he at least
made frequent reference to quaternions, perhaps to help his readers. Nevertheless,
his work made it clear that vectors were the real tool for physical thinking and not
just an abbreviated scheme of writing, as some mathematicians maintained. Thus
5
He used the word “nabla” because ∇ looks like an ancient Hebrew instrument of that
name.