Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.


NonlinearBook10pt November 20, 2007
OPTIMAL NONLINEAR FEEDBACK CONTROL 555
Finally, the concept of optimality with respect to a Lyapunov function
introduced in Problem 8.3 is du e to Berns tein [43] w hile the inverse optimal
controller for J-Q type sys tems introduced in Problem 8.13 and the inverse
optimal controller for the minimum ph ase system introduced in Prob lem
8.14 is due to Wan and Bern s tein [449]. The concept of the pointwise
control min imization for generating control Lyapunov functions introduced
in Problem 8.20 is due to Freeman and Primbs [129].

NonlinearBook10pt November 20, 2007
NonlinearBook10pt November 20, 2007
Chapter Nine
Inverse Optimal Control and Integrator
Backstepping
9.1 Introduction
Control system designers have usually resorted to Lyapunov methods [445]
in order to obtain stabilizing controllers for nonlinear systems. In particular,
for smooth feedback, Lyapunov-based methods were inspired by Jur djevic
and Quinn [224] who give sufficient conditions for smooth stabilization b ased
on the ability of constructing a Lyapun ov function for the closed-loop system
[434]. Unfortunately, however, there does not exist a un ified procedu re for
finding a Lyapunov function candidate that will stabilize the closed-loop
system for general nonlinear systems. Recent work involving differential
geometric methods [212, 336] has made the d esign of controllers for certain
classes of nonlinear systems more methodical. Such frameworks in clude the
concepts of zero dynamics and feedback linearization and require that the
system zero dynamics are asymptotically stable, ensuring the existence of
globally defined diffeomorph ism s to transf orm the nonlinear system into a
normal form [212,336]. These techniques, however, usually rely on canceling
out system nonlinearities using feedback and may therefore lead to inefficient
designs since feedback linearizing controllers may generate unnecessarily
large control effort to cancel beneficial system nonlinearities.
Backstepping control has recently received a great deal of attention in
the nonlinear control literature [222, 230, 246, 249, 392]. The popu larity of
this control methodology can be explained in a large part due to the fact
that it provides a framework for designing stabilizing nonlinear controllers
for a large class of nonlinear dynamical cascade systems. This framework
guarantees stability by providing a systematic procedure for finding a
Lyapunov function for the closed-loop system and choosing the control such
that the time derivative of the L yapunov function along the trajectories of
the closed-loop dynamical system is negative. Furthermore, the controller is
obtained in such a way th at the nonlinearities of the dynamical system,
which may be useful in reaching performance objectives, need not be

NonlinearBook10pt November 20, 2007
558 CHAPTER 9
canceled as in state or outpu t feedback linearization techn iques. Using this
framework, the control sys tem designer has a significant amount of freedom
in designing the controller to address specific performance objectives w hile
guaranteeing closed-loop stability.
In [126,127] optimal pointwise min-norm state tracking controllers are
obtained for feedback linearizable systems by computing pointwise solutions
of a s tatic quadratic programming problem. A trade-off between control
effort and tracking error is automatically taken into account in designing
these controllers. The optimality of this control design method relies on
the fact that every Lyapunov function solves the Hamilton-Jacobi-Bellman
equation associated with a cost functional. However, this theory does
not present a natural extension to the larger class of systems for which
recursive b ackstepping is applicable. In p articular, it is noted in [247] that
for recursive control s chemes such as backstepping, optimization of partial
cost functionals at each step will by no means result in overall optimization.
Backstepping does, however, utilize a Lyapunov function for the overall
system based on stabilizing fu nctions (virtual controls) which are defined
at each recursion step. This Lyapunov function can be used to derive a
performance criterion for which the overall control, consisting of the control
law obtained at the final and intermediate steps, is optimal.
In this chapter, we extend the optimality-based n onlinear control fra-
mework developed in Chapter 8 to cascade and block cascade systems for
which the backstepping control design methodology is applicable. The key
motivation for developing an optimal and inverse optimal nonlinear back-
stepping control theory is that it provides a family of candidate backstepping
controllers parameterized by the cost functional that is minimized. In order
to ad dress the optimality-based backstepping nonlinear control problem
we use the nonlinear-nonquadratic optimal control framework developed in
Chapter 8 to show that a particular controller derived via backstepping
methods corresponds to the solution of an optimal control problem that
minimizes an inverse nonlinear-nonquadratic performance criterion. This is
accomplished by choosing the controller such that th e Lyapunov derivative is
negative along the closed-loop system trajectories while pr oviding suffi cient
conditions for the existence of asymptotically stabilizing solutions to the
Hamilton-Jacobi-Bellman equation. Thus, our results allow us to derive
globally asymptotically stabilizing backstepping controllers for nonlinear
systems that minimize a derived nonlinear-nonquadratic performance func-
tional.

NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 559
9.2 Cascade and Block Cascade Control Design
In this section, we consider the nonlinear cascade system
˙x(t) = f(x(t)) + G(x(t))ˆx(t), x(0) = x
0
, t ≥ 0, (9.1)
˙
ˆx(t) = u(t), ˆx(0) = ˆx
0
, (9.2)
where x ∈ R
n
, ˆx ∈ R
m
, f : R
n
→ R
n
satisfies f(0) = 0, and G : R
n
→ R
m
.
Here, we seek a globally stabilizing feedback controller f or (9.1) and (9.2). To
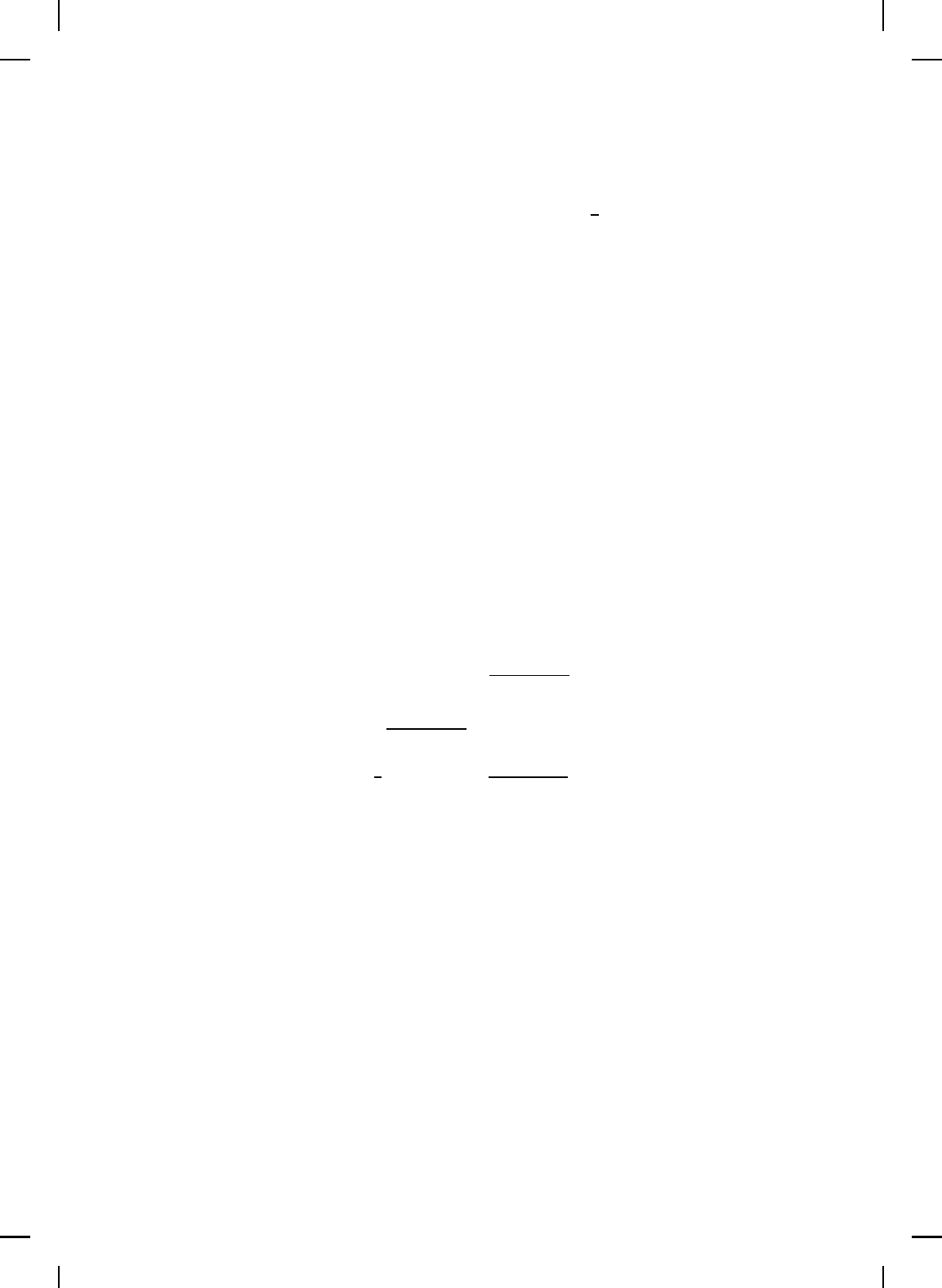
introduce the integrator backstepping approach note that (9.1) and (9.2) can
be viewed as a cascade connection of two dynamical subsys tems, as shown
in Figure 9.1(a). Specifically, the first subsystem is (9.1) with input ˆx and
the second subsys tem consists of m integrators. Next, we assume that there
exists a continuously differentiable function α : R
n
→ R
m
such that the zero
solution x(t) ≡ 0 of the first subsystem (9.1) is asymptotically stable with ˆx
replaced by α(x). In this case, it follows from Theorem 3.9 th at there exists
a continuously differentiable positive-definite function V
sub
: R
n
→ R such
that
V
′
sub
(x)[f(x) + G(x)α(x)] < 0, x ∈ R
n
, x 6= 0. (9.3)
Next, adding and subtracting G(x)α(x), x ∈ R
n
, to and f rom (9.1)
yields the equivalent dynamical system
˙x(t) = f (x(t)) + G(x(t))α(x(t)) + G(x(t))[ˆx(t) −α(x(t))],
x(0) = x
0
, t ≥ 0, (9.4)
˙
ˆx(t) = u(t), ˆx(0) = ˆx
0
, (9.5)
shown in Figure 9.1(b). Introducing the change of variables z(t)
△
= ˆx(t) −
α(x(t)) yields
˙x(t) = f(x(t)) + G(x(t))α(x(t)) + G(x(t))z(t), x(0) = x
0
, t ≥ 0, (9.6)
˙z(t) = u(t) − ˙α(x(t)), z(0) = z
0
. (9.7)
As shown in Figure 9.1(c), transforming (9.1) and (9.2) to (9.6) and (9.7)
can be viewed as “backstepping” −α(x) through the integrator subsystem.
Now, with v(t)
△
= u(t) − ˙α(x(t)), (9.6) and (9.7) reduces to
˙x(t) = f(x(t)) + G(x(t))α(x(t)) + G(x(t))z(t), x(0) = x
0
, t ≥ 0, (9.8)
˙z(t) = v(t), z(0) = z
0
, (9.9)
which, when z(t) is bounded and z(t) → 0 as t → ∞, is an asymptotically
stable cascade system (see Proposition 4.2).
Exploiting this feature, we can stabilize the overall system by consid-
ering the Lyapunov function candid ate
V (x, ˆx) = V
sub
(x) + (ˆx −α(x))
T
P (ˆx − α(x)), (9.10)
NonlinearBook10pt November 20, 2007
560 CHAPTER 9
-
u
R
-
ˆx
G
-
x
(a)
-
u
R
-
ˆx
⊖
-
⊕
-
G
-
x
α(x)
66
(b)
-
u
⊖
-
R
-
ˆx −α(x)
⊕
-
G
-
x
α(x)
6
˙α(x)
6
(c)
Figure 9.1 Visualization of integrator backstepping.
where P ∈ R
m×m
is an arbitrary positive-definite matrix. In th is case, the
Lyapunov derivative is given by
˙
V (x, ˆx) = V
′
sub
(x)[f(x) + G(x)α(x)] + V
′
sub
(x)G(x)z + 2z
T
P v. (9.11)
Letting v = −
1
2
P
−1
G
T
(x)V
′T
sub
(x) − kz, where k > 0, yields
˙
V (x, ˆx) = V
′
sub
(x)[f(x) + G(x)α(x)] − k(ˆx − α(x))
T
P (ˆx −α(x))
< 0, (x, ˆx) ∈ R
n
× R
m
, (x, ˆx) 6= (0, 0). (9.12)
Hence, the control law
u = v + ˙α(x)
= −k(ˆx − α(x)) −
1
2
P
−1
G
T
(x)V
′T
sub
(x) + α
′
(x)[f(x) + G(x)ˆx)], (9.13)
stabilizes the nonlinear cascade system (9.1) and (9.2). Using the above
results the following proposition is immediate.
NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 561
Proposition 9.1. Consider th e nonlinear cascade system (9.1) and
(9.2). Assume that there exist a continuously differentiable fu nction α :
R
n
→ R
m
and a continuously differentiable radially unbounded function
V
sub
: R
n
→ R such that
α(0) = 0, (9.14)
V
sub
(0) = 0 (9.15)
V
sub
(x) > 0, x ∈ R
n
, x 6= 0, (9.16)
V
′
sub
(x)[f(x) + G(x)α(x)] < 0, x ∈ R
n
, x 6= 0. (9.17)
Then, the zero solution (x(t), ˆx(t)) ≡ (0, 0) of the cascade system (9.1) and
(9.2) is globally asymp totically stable with the feedback control law (9.13).
Example 9.1. Consider the nonlinear cascade system
˙x
1
(t) = −
3
2
x
2
1
(t) −
1
2
x
3
1
(t) −x
2
(t), x
1
(0) = x
10
, t ≥ 0, (9.18)
˙x
2
(t) = u(t), x
2
(0) = x
20
. (9.19)
Here, we seek a globally stabilizing controller for (9.18) and (9.19) u s ing
the integrator backstepping approach. Note that (9.18) and (9.19) has the
correct form for the application of Proposition 9.1 where (9.18) makes up the
nonlinear subsystem and x
2
is the integrator state. Specifically, (9.18) and
(9.19) can be wr itten in the form of (9.1) and (9.2) where x = x
1
, ˆx = x
2
,
and
f(x) = −
3
2
x
2
−
1
2
x
3
, G(x) = −1.
To apply Proposition 9.1 we require a stabilizing f eedback for the
subsystem (9.18) and a corresponding Lyapunov function V
sub
(x) such that
(9.14)–(9.17) are satisfied. For the n on linear subsystem (9.18) we choose the
Lyapunov function candidate
V
sub
(x) = x
2
1
(9.20)
and the stabilizing feedback control
α(x) = −
3
2
x
2
. (9.21)
It is straightforward to show that (9.20) and (9.21) satisfy conditions (9.14)–
(9.17) of Proposition 9.1. Now, it follows from Proposition 9.1 that the
control law given by (9.13), that is,
u = −k(x
2
+
3
2
x
2
1
) + P
−1
x
1
+ 3x
1
(
3
2
x
2
1
+
1
2
x
3
1
+ x
2
), (9.22)
where k and P are positive constants, is a globally stabilizing feedback
control law for the overall system (9.18) and (9.19). △
Example 9.2. Consider the nonlinear cascade system
˙x
1
(t) = −
σ
2
x
1
(t)[
1
4
x
2
1
(t) + 2x
2
(t) + x
2
2
(t)], x
1
(0) = x
10
, t ≥ 0, (9.23)
NonlinearBook10pt November 20, 2007
562 CHAPTER 9
˙x
2
(t) = −
3
2
x
2
2
(t) −
1
2
x
3
2
(t) −
3
4
x
2
1
(t)(1 + x
2
(t)) − x
3
(t), x
2
(0) = x
30
,
(9.24)
˙x
3
(t) = u(t), x
3
(0) = x
30
, (9.25)
where σ > 0. Once again, we seek a globally stabilizing controller for (9.23)–
(9.25) using Proposition 9.1. Note that (9.23)–(9.25) has the correct form
for the application of Proposition 9.1 where (9.23) and (9.24) make up the
nonlinear subsystem and x
3
is the integrator state. Specifically, (9.23)–(9.25)
can be written in the form of (9.1) and (9.2) where x = [x
1
x
2
]
T
, ˆx = x
3
,
and
f(x) =
σ
2
x
1
(
1
4
x
2
1
+ 2x
2
+ x
2
2
)
−
3
2
x
2
2
−
1
2
x
3
2
−
3
4
x
2
1
(1 + x
2
)
, G(x) =
0
−1
.
To apply Proposition 9.1 we require a stabilizing feedback for the
subsystem (9.23) and (9.24) and a corresponding Lyapunov fun ction V
sub
(x)
such that (9.14)–(9.17) are satisfied. For the nonlinear subsystem (9.23) and
(9.24) we choose the Lyapunov function candidate
V
sub
(x) = εx
4
1
+ x
2
2
, (9.26)
where ε > 0, and the stabilizing feedback control
α(x) = −(2εσx
4
1
+
3
2
x
2
2
+
3
4
x
2
1
). (9.27)
It is straightforward to show that (9.26) and (9.27) s atisfy conditions (9.14)–
(9.17) of Proposition 9.1. Now, it f ollows from Proposition 9.1 that the
control law given by (9.13), that is,
u = −k(x
3
− α(x)) + P
−1
x
2
+ α
′
(x)[f(x) + G(x)x
3
], (9.28)
where k and P are positive constants, is a globally stabilizing feedback
control law for the overall system (9.23)–(9.25). △
Next, we consider the application of backsteppin g control design to
more general block cascade systems of the form
˙x(t) = f (x(t)) + G(x(t))ˆx(t), x(0) = x
0
, t ≥ 0, (9.29)
˙
ˆx(t) =
ˆ
f(x(t), ˆx(t)) +
ˆ
G(x(t), ˆx(t))u(t), ˆx(0) = ˆx
0
, (9.30)
where the subsystem (9.29) is as (9.1) and ˆx ∈ R
m
,
ˆ
f : R
n
× R
m
→ R
m
satisfies
ˆ
f(0, 0) = 0, an d
ˆ
G : R
n
×R
m
→ R
m×m
. Now, suppose det
ˆ
G(x, ˆx) 6=
0, (x, ˆx) ∈ R
n
× R
m
, and suppose there exists a continuously differentiable
function α : R
n
→ R
m
such that the zero solution x(t) ≡ 0 of (9.29) is
asymptotically stable with ˆx replaced by α(x). In this case, it follows from
Theorem 3.9 that there exists a continuously differentiable positive-definite
function V
sub
: R
n
→ R such th at (9.17) holds. Now, once again using the
Lyapunov function candidate given by (9.10) for the overall system (9.29)

NonlinearBook10pt November 20, 2007
OPTIMAL INTEGRATOR BACKSTEPPING CONTROL 563
and (9.30), it follows that
˙
V (x, ˆx) = V
′
sub
(x)[f(x) + G(x)α(x)] + V
′
sub
(x)G(x)[ˆx − α(x)]
+2[ˆx − α(x)]
T
P
n
ˆ
f(x, ˆx) +
ˆ
G(x, ˆx)u −α
′
(x)[f(x) + G(x)ˆx]
o
.
(9.31)
Now, choosing
u =
ˆ
G
−1
(x, ˆx)
α
′
(x)[f(x) + G(x)ˆx] −
1
2
P
−1
G
T
(x)V
′T
sub
(x) −
ˆ
f(x, ˆx)
−k(ˆx −α(x))
, (9.32)
where k > 0, it follows that (9.12) is satisfied, and hence, (9.32) stabilizes
the block cascade sy s tem (9.29) and (9.30). If, in addition, V
sub
(·) is radially
unbounded, (9.32) is a global stabilizer.
Using the b ackstepping f ormulation discussed above, it follows that a
recursive formulation of this approach can be used to stabilize strict-feedback
nonlinear smooth systems of the form
˙x(t) = f (x(t)) + G(x(t))ˆx
1
(t), x(0) = x
0
, t ≥ 0, (9.33)
˙
ˆx
1
(t) =
ˆ
f
1
(x(t), ˆx
1
(t)) +
ˆ
G
1
(x(t), ˆx
1
(t))ˆx
2
(t), ˆx
1
(0) = ˆx
0
1
, (9.34)
˙
ˆx
2
(t) =
ˆ
f
2
(x(t), ˆx
1
(t), ˆx
2
(t)) +
ˆ
G
2
(x(t), ˆx
1
(t), ˆx
2
(t))ˆx
3
(t),
ˆx
3
(0) = ˆx
0
2
, (9.35)
.
.
.
˙
ˆx
m
(t) =
ˆ
f
m
(x(t), ˆx
1
(t), . . . , ˆx
m
(t)) +
ˆ
G
m
(x(t), ˆx
1
(t), . . . , ˆx
m
(t))u(t),
ˆx
m
(0) = ˆx
0
m
, (9.36)
where x ∈ R
n
, f : R
n
→ R
n
satisfies f(0) = 0, G : R
n
→ R
m
, ˆx
i
∈ R,
i = 1, . . . , m,
ˆ
f
i
: R
n
× R
i
→ R satisfies
ˆ
f
i
(0) = 0, i = 1, . . . , m, and
ˆ
G
i
: R
n
× R
i
→ R, i = 1, . . . , m. Specifically, assuming
ˆ
G
i
(x, ˆx
1
, . . . , ˆx
i
) 6=
0, 1 ≤ i ≤ m, and assuming the there exists an m-times continuously
differentiable fu nction α : R
n
→ R such that the first subsystem (9.33) is
asymptotically stable with ˆx
1
replaced by α(x), a recursive backstepping
procedure can be used to stabilize (9.33)–(9.36).
In particular, considering th e system
˙x(t) = f(x(t)) + G(x(t))ˆx
1
(t), x(0) = x
0
, t ≥ 0, (9.37)
˙
ˆx
1
(t) =
ˆ
f
1
(x(t), ˆx
1
(t)) +
ˆ
G
1
(x(t), ˆx
1
(t))ˆx
2
(t), ˆx
1
(0) = ˆx
0
1
, (9.38)
it follows from (9.29)–(9.32), with ˆx = ˆx
1
, u = ˆx
2
,
ˆ
f(x, ˆx) =
ˆ
f
1
(x, ˆx
1
), and
NonlinearBook10pt November 20, 2007
564 CHAPTER 9
ˆ
G(x, ˆx) =
ˆ
G
1
(x, ˆx
1
), that the feedback control law
α
1
(x, ˆx
1
) =
ˆ
G
−1
1
(x, ˆx
1
)
α
′
(x)[f(x) + G(x)ˆx
1
] −
1
2
P
−1
1
G
T
(x)V
′T
sub
(x)
−
ˆ
f
1
(x, ˆx
1
) − k
1
(ˆx
1
− α(x))
, k
1
> 0, (9.39)
asymptotically stabilizes (9.37) and (9.38) with Lyapu nov function
V
1
(x, ˆx
1
) = V
sub
(x) + P
1
(ˆx
1
− α(x))
2
, (9.40)
where V
sub
(x) is such that (9.3) holds. Next, considering the system
˙x(t) = f(x(t)) +
ˆ
G(x(t))ˆx
1
(t), x(0) = x
0
, t ≥ 0, (9.41)
˙
ˆx
1
(t) =
ˆ
f
1
(x(t), ˆx
1
(t)) +
ˆ
G
1
(x(t), ˆx
1
(t))ˆx
2
(t), ˆx
1
(0) = ˆx
0
1
, (9.42)
˙
ˆx
2
(t) =
ˆ
f
2
(x(t), ˆx
1
(t), ˆx
2
(t)) +
ˆ
G
2
(x(t), ˆx
1
(t), ˆx
2
(t))ˆx
3
(t), ˆx
3
(0) = ˆx
0
2
,
(9.43)
it follows fr om (9.29)–(9.32), with x =
x
T
ˆx
T
1
T
, ˆx = ˆx
2
, u = ˆx
3
,
f(x) =
f(x) + G(x)ˆx
1
ˆ
f
1
(x, ˆx
1
)
, G(x) =
0
G
1
(x, ˆx
1
)
,
ˆ
f(x, ˆx) =
ˆ
f
2
(x, ˆx
1
, ˆx
2
), and
ˆ
G(x, ˆx) =
ˆ
G
2
(x, ˆx
1
, ˆx
2
), that the feedback
control law
α
2
(x, ˆx
1
, ˆx
2
) = G
−1
2
(x, ˆx
1
, ˆx
2
)
∂α
1
(x, ˆx
1
)
∂x
T
[f(x) + G(x)ˆx
1
]
+
∂(x, ˆx
1
)α
1
∂ˆx
1
T
[
ˆ
f
1
(x, ˆx
1
) + G
1
(x, ˆx
1
)ˆx
2
]
−
1
2
P
−1
2
G
1
(x, ˆx
1
)
∂V
1
(x, ˆx
1
)
∂ˆx
1
−
ˆ
f
2
(x, ˆx
1
) − k
2
[ˆx
2
− α
1
(x, ˆx
1
)]
, k
2
> 0, (9.44)
asymptotically stabilizes (9.41)–(9.43) with Lyapunov function
V
2
(x, ˆx
1
, ˆx
2
) = V
1
(x, ˆx
1
) + P
2
(ˆx
2
− α
1
(x, ˆx
1
))
2
. (9.45)
Repeating this procedure m-times, an overall state feedback controller of
the form u = α
m
(x, ˆx
1
, . . . , ˆx
m
) with Lyapunov f unction V
m
(x, ˆx
1
, . . . , ˆx
m
)
can be obtained for the strict-feedback nonlinear system (9.34)–(9.36).
Example 9.3. To demonstrate the recursive backstepping procedure
discussed above consider the nonlinear dynamical system
˙x
1
(t) = x
4
1
(t) −x
5
1
(t) + x
2
(t), x
1
(0) = x
10
, t ≥ 0, (9.46)
˙x
2
(t) = x
3
(t), x
2
(0) = x
20
, (9.47)